單通道SAR抗欺騙干擾方法
2019-04-04 01:33:22劉寧趙博黃磊
雷達學報 2019年1期
劉 寧 趙 博 黃 磊
①(軍事科學院 北京 100091)
②(深圳大學信息工程學院廣東省智能信息處理重點實驗室 深圳 518060)
1 引言
欺騙干擾機根據預先設計好的虛假場景,對截獲的合成孔徑雷達(Synthetic Aperture Radar,SAR)信號進行延時與相位調制,從而在SAR成像結果中形成逼真的虛假目標。欺騙干擾比傳統的噪聲干擾需要更低的干擾功率,并能對SAR成像帶來更大的危害。隨著SAR欺騙干擾技術的發展,所產生的虛假目標逼真度越來越高,且產生效率更高,增加了欺騙干擾機的威脅性,使其能夠以隱蔽的手段誤導SAR系統的信息獲取與圖像解譯,導致戰略決策的失誤[1-8]。如何有效地對SAR欺騙干擾進行抑制,是SAR成像系統面臨的一個重要問題。
當前SAR對抗欺騙干擾的方法主要有兩類。一類方法采用復雜的多通道/多基地SAR成像系統,使得不同通道間接收到的真實回波與欺騙干擾之間存在顯著的差異,從而可以利用這些差異進行有效的干擾抑制,改善SAR成像系統的抗欺騙干擾性能[9-14]。這類系統的優勢在于,多個接收通道/天線能夠提供更多空間自由度時,并可工作在靜默接收模式,這樣的抗干擾手段使得干擾機難以察覺,因而難以及時地采取反制措施。但這類系統的實現通常比單通道系統具有更高的成本,在一定程度上限制了其應用。且這類方法不能在單通道SAR系統中有效工作。
另一方面,從干擾機自身的限制入手,可以在SAR成像端設計相應的方法進行對抗。利用欺騙干擾機難以在一個脈沖重復周期內完成干擾調制這一缺陷,SAR成像系統可以采用波形捷變的策略對抗欺騙干擾,主要方法包括脈沖相位擾動、隨機初相、正交頻分復用等[15-21],使得成本相對于多通道/多基地的對抗手段更加低廉。此外,還可以利用干擾機量化精度不高的缺點,對接收到的數據進行處理以便抑制欺騙干擾[22]。但是,隨著干擾機實時性能以及調制精度的不斷提升,這類方法將面臨失效的威脅,從而需要承擔抗欺騙干擾手段升級的成本,使得SAR成像系統與干擾機陷入不斷的循環競爭之中。
在單通道、固定波形的SAR平臺假設下,進行欺騙干擾抑制所能利用的空間自由度與時間自由度均受到了限制,為算法設計帶來了巨大的挑戰。為了有效地解決這一問題,我們將這個復雜的問題分解為幾個子問題,使得對欺騙干擾抑制問題的研究逐步深入。首先對SAR成像場景中散布的虛假目標進行辨識,實現成像信息的快速甄別。然后,考慮到真實目標與虛假目標位置重合的應用場景,進一步討論了兩者的分離重構問題。由于欺騙干擾通常針對SAR場景中包含敏感信息的人造目標進行保護覆蓋,兩者均具有稀疏特性,因此采用了基于動態合成孔徑的解決方案。一方面采用超分辨預處理減小重構問題的求解空間;另一方面,在構造目標表征字典時進一步完善散射點的旁瓣以及相位信息,這使得我們能夠同時進行超分辨重構與干擾分離處理。該方法能夠直接應用于傳統的單通道SAR系統中而不會引起高昂的升級成本。此外,值得注意的是,本文所涉及的方法是基于真實回波與欺騙干擾之間形成機理的本質性差異進行設計的,因此該方法并不會因為干擾機技術水平的提升而失效。
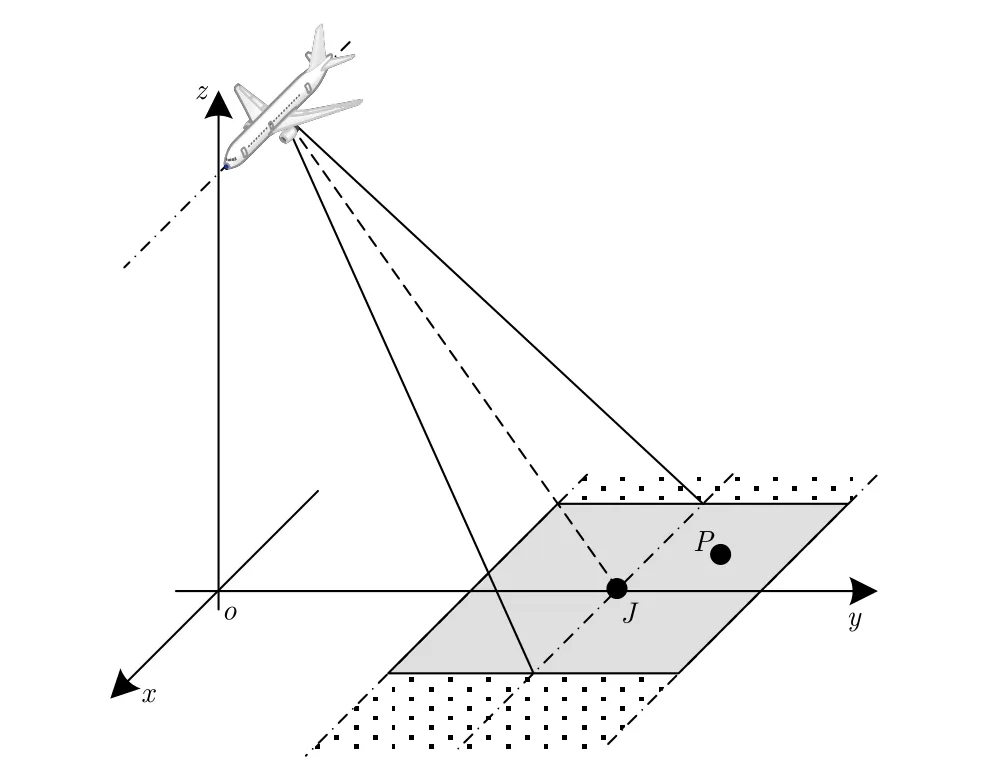
圖1 SAR成像與欺騙干擾幾何模型Fig.1 Geometric model of SAR imaging and deceptive jamming
2 信號模型
SAR成像與欺騙干擾的幾何模型如圖1所示。慢時間的零點設置為SAR波束中心指向干擾機的時刻,x軸與SAR飛行的航跡平行,z軸垂直于地面向上,y軸則可以根據右手法則確定。
對于任意散射點P,其回波的支撐域為[-T/2+τ,T/2+τ],其中T表示合成孔徑時間,τ表示SAR波束中心指向點P的時刻。圖1中的灰色區域表示SAR天線主瓣照射的區域,在條帶模式下該區域隨著SAR平臺的移動以同樣的速度v移動,從而實現對地面場景的觀測成像。
在成像場景中,為了在真實散射點P的位置引入一個虛假的散射點P′,需要對干擾機與待生成散射點之間的瞬時斜距差 ΔR(ta)進行計算。利用ΔR(ta)對干擾機截獲的SAR信號進行幅度、延時以及相位調制,該過程可以表述為

其中,*表示卷積運算,δ (?)表示單位沖激函數,s(tr,ta) 表示截獲的SAR信號,ΔR(ta)=R(ta-τ)-RJ(ta),R(ta-τ) 與RJ(ta) 分別表示散射點P與干擾機J的瞬時斜距。虛假點的慢時間支撐區為[-T/2,T/2],這是由于SAR波束主瓣增益遠大于旁瓣,干擾機通常只能在主瓣內進行有效干擾。而真實散射點的支撐區域為 [-T/2+τ,T/2+τ],與干擾機的支撐域并不重合,因此需要將真實回波特征進行拓展以產生虛假散射點。雖然在經由方位向相干處理后真實散射點與虛假散射點均能夠在圖像域得到有效的聚焦,但由于各自生成機理的不同,它們在時頻域的分布特性存在差異。真實回波與欺騙干擾之間的關系可以描述為

為了簡化表示,分別用s(ta) 和s′(ta) 表示s(tr,ta)與s′(tr,ta) 。fdc表示多普勒中心頻率(僅在斜視模式下存在),γ表示多普勒調頻率,它們分別由瞬時斜距關于慢時間的1次項與2次項決定。若將信號s(ta) 的多普勒譜表示為S(fa),則有

相比于S(fa),虛假多普勒譜S′(fa)在多普勒維與慢時間維分別平移了γ τ 與- τ。而式(3)中的最后一個指數項對于某一 τ而言,是一個確定的常數項。由式(3)所示的時頻特性分布如圖2所示。
盡管不同真實散射點的回波分布在不同的慢時間支撐域,它們具有相同的多普勒特性,都沿慢時間軸分布在帶寬為Ba的區域內,如圖2中的粗實線所示。由于SAR天線主瓣的限制,欺騙干擾沿多普勒軸分布于-T/2與T/2之間的區域,如圖2中的粗虛線所示。真實回波的支撐域與欺騙干擾的支撐域僅當真實點與虛假點位于與干擾機相同的方位單元內時能夠完全重合。當散射點在方位維逐漸遠離干擾機時,真實點與虛假點能夠重合的公共區域逐漸減少直至消失。基于上述的時頻分布特性差異,我們可以在單通道、固定波形SAR系統中,對欺騙干擾進行抑制。
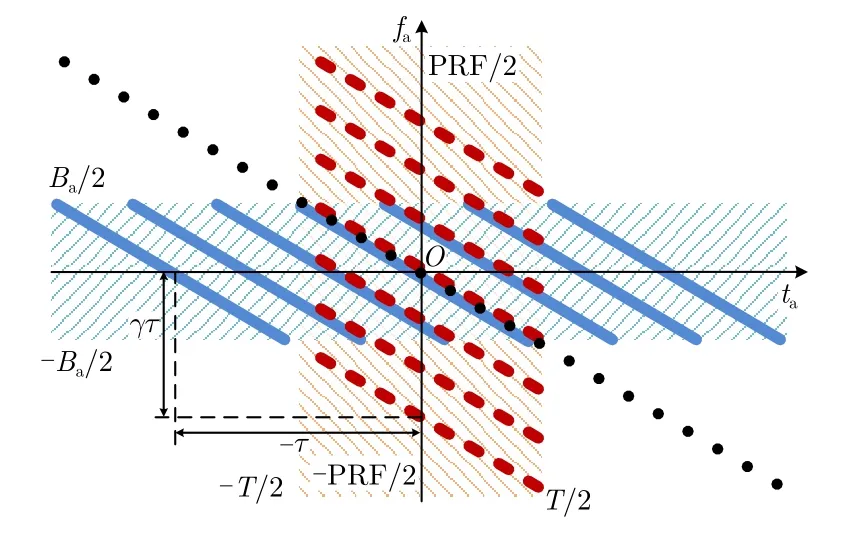
圖2 SAR真實回波與欺騙干擾時頻分布Fig.2 Time-frequency distribution of true SAR echoes and deceptive jamming
3 虛假目標辨識
3.1 算法原理
假設成像場景中包含M個真實散射點和N個虛假散射點,則SAR接收到的混合數據可以表示為[23]

為了最大化真實場景與欺騙干擾之間的差異性,需要采用兩種不同的成像處理流程對混合數據進行處理。其中方位像1通過對第k個距離單元內所有方位慢時間域的數據進行dechirp處理得到。Dechirp參考信號s0(ta)能夠覆蓋整個真實回波與欺騙干擾的時頻分布區域,如圖2中的點狀線所示。由此得到的方位像為

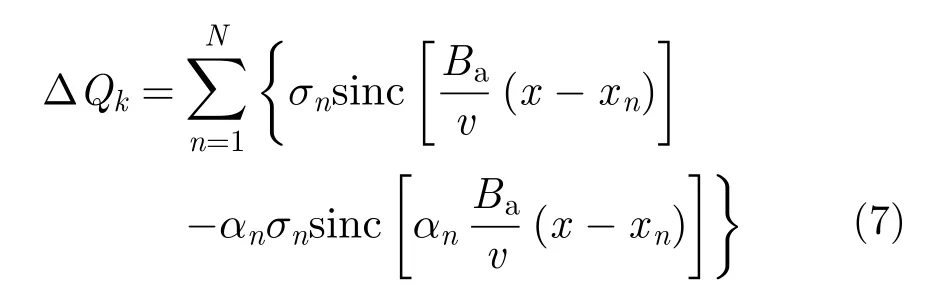
其中, F (?) 表示傅里葉變換,x=-fav/γ表示散射點方位維的位置,σm(n)與xm(n)分別表示第m(n)個散射點的散射系數與方位位置。式(5)中所有的真實目標點與虛假目標點能夠達到相同的分辨率。
方位像2在進行dechirp處理前進行了頻域濾波處理,在盡可能地抑制欺騙干擾的同時,最大限度地保留真實回波,從而可得

其中,SE(fa)表示sE(ta)的頻譜,F-1(?)表示逆傅里葉變換,H(fa)表 示帶通濾波器,其表達式為H(fa)=rect(fa/Ba), αn表示第n個虛假散射點的帶寬損失系數。αn在sinc函數中的出現會導致成像分辨率的損失,它同時也出現在散射系數之前,引起其幅度的衰減。由于不同的時頻分布特性,αn=1-Δxn/Ls是一個關于第n個虛假散射點位置的函數,其中Δxn=|xn-xJ| 表示第n個虛假散射點與干擾機之間的距離,Ls為合成孔徑長度。當Δxn=0時,產生的虛假散射點位于與干擾機相同的方位單元內,從而有αn=1。這是由于此時的欺騙干擾具有與真實回波相同的時頻分布特性,因而其特征能夠被濾波器完整地保留。當虛假散射點逐漸遠離干擾機時,αn隨著Δxn的增大而減小。當虛假目標點超出[-Ls+xJ,Ls+xJ]的范圍時,它將不再出現在成像結果中。
從Q2k(x)中 減去Q1k(x),可以得到
將 ΔQk表示為向量形式Δk∈R1×L,其中L表示目標對應的方位采樣單元數。針對不同的距離采樣單元進行相同的操作,則可以得到僅包含虛假目標的2維SAR圖像。將差分圖像表示為Δ=[Δ1,Δ2,???,ΔK]T∈RK×L,采用W×W的矩形窗對 Δ 進行逐點處理,可以得到觀測窗內子圖像 Δ′的統計直方圖 ∈R1×(W×W)。統計直方圖 與參考直方圖o之間的匹配距離,即它們之間差值的 ?1范數被用于區分真實目標與虛假目標的差分特征,即

依照式(8)逐點計算直方圖匹配距離,則可得到匹配距離矩陣 ∈RK×L。與Δ 相比,欺騙干擾目標與真實目標之間的差異性得到了增強,從而通過設計合理的閾值,對虛假目標進行標識。
3.2 實驗結果
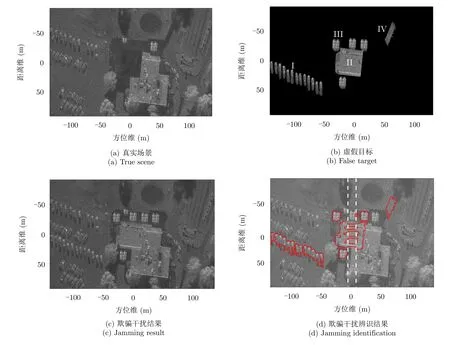
圖3 SAR場景欺騙干擾辨識結果Fig.3 Deceptive jamming identification result in a SAR scene
對復雜場景進行仿真實驗,可以有效驗證所提方法在實際應用中的性能。該實驗中,在圖3(a)所示的真實場景中,欺騙干擾機在空地中引入了虛假的車輛目標,如圖3(b)中I與III所示,并引入了虛假的建筑目標與田野,即目標II與IV,用以掩蓋真實的地形信息。在包含欺騙干擾的成像結果圖3(c)中,虛假目標能夠與真實場景較好地融合,對真實場景實現有效地保護。圖3(d)所示為所提算法對欺騙干擾進行辨識的結果,除了距離干擾機小于5%Ls范圍的車輛與部分建筑未被有效辨識以外,其余的虛假目標均能夠被有效地辨識。
4 目標分離重構
當真實目標與虛假目標位置重合時,僅通過虛假目標辨識難以有效地排除欺騙干擾的影響,此時需要根據真實目標與虛假目標的信號混合模型構造優化問題,對兩者分別進行分離重構。
4.1 算法原理[24,25]
對混合數據進行dechirp處理,可得到如圖4所示的時頻分布結果。

圖4 Dechirp后的SAR真實回波與欺騙干擾時頻分布Fig.4 Time-frequency distribution of true SAR echoes and deceptive jamming after dechirping
為了進行欺騙干擾抑制,需要對真實回波以及欺騙干擾的特征進行完整地或部分地保留。為此,定義如圖4中點線框所示為動態合成孔徑w(ta),即

其中, ηw表示第w個動態合成孔徑的中心。當ηw變化時,動態合成孔徑的位置沿著慢時間軸移動,從而可以對混合數據的不同部分進行提取。提取得到的真實方位像為

其中,φ=-4R0/λ+2fdcτ-γτ2。對于同一個真實散射點而言,不同的動態合成孔徑提取了它的不同部分回波,由此得到的成像結果也會存在不同程度的幅度衰減與主瓣展寬,可用衰減系數 α進行描述,即

需要注意的是,α隨著動態合成孔徑的中心ηw以及散射點的位置τ 而變化。不同的ηw將形成不同的方位像U(fa,ηw)。在所用不同的動態合成孔徑內,同一散射點均能夠以sinc函數的形式被聚焦于方位維- γτ的位置。但由于不同動態孔徑內目標回波的帶寬損失不同,由此引起的幅度衰減與主瓣展寬也不同。而不同散射點在同一動態合成孔徑內的聚焦性能衰減也有所不同。
動態合成孔徑內的虛假方位像為
相應的虛假散射點衰減因子為
α′τ并不隨著 而變化,這意味著在同一動態合成孔徑內的不同虛假散射點具有相同的幅度衰減與主瓣展寬,這與真實散射點的特性存在差異,從而可以利用這些差異進行目標重構。
4.2 初步分離重構
真實目標與虛假目標的初步分離重構僅考慮散射點的幅度信息。將u(ta)表示為向量形式則有w∈C1×L。通過不同的動態孔徑處理,可以得到觀測矩陣 =[1,???,w,???,W]T∈CW×L。散射點在不同動態孔徑中的幅度衰減特征可以描述為它們各自的元素分別為α 與α′。
通常情況下,我們在SAR圖像中更加關注于人造目標的解譯,而這類目標通常也是欺騙干擾機保護的重點。人造目標通常由平板、二面角、三面角、圓柱體的典型結構組成,具有稀疏的孤立散射中心。與此同時,為了保證欺騙干擾的效率,干擾機產生的虛假目標通常是由有限的散射點組成,因此在圖像域也具有稀疏特性。在真實目標與虛假目標的粗分離重構中,僅考慮它們各自的幅度特征,因而需要采用超分辨預處理對稀疏散射點的位置進行估計,以便簡化后續的干擾抑制問題。假設由預處理估計得到的散射點稀疏位置集合為Dt={τt|τt∈Dpor τt∈Dq},其中Dp與Dq分別表示真實目標與虛假目標的位置集合。則欺騙干擾抑制問題可以描述為

其中,D=[1,L]表示對應某目標所有可能的散射點的完全集合,分別表示真實與虛假目標的方位1維像,矩陣稀疏位置的估計縮小了優化問題的可行域,使得SAR欺騙干擾抑制問題能夠更加高效地求解。利用凸優化工具箱,可以直接對式(14)進行求解,從而獲得真實目標與虛假目標的分離重構結果,實現初步的單通道SAR欺騙干擾抑制。
4.3 精細分離重構
SAR系統同時對真實目標回波以及欺騙干擾進行接收,可將第w個動態合成孔徑內的方位像描述為

基于 與 的稀疏特性假設,可以對目標重構問題描述如下:

其中,ε為可以容忍的誤差閾值。將(16)轉換為一個無約束的優化問題,可得

其中,ρ為懲罰因子,它可以在稀疏度與重構誤差之間做出權衡。?1范數對方位像的散射點幅度進行疊加,因此與 ?2范數的懲罰項在幅度上具有相同的量級,從而使得 ρ不依賴于SAR系統的相干處理增益。式(17)與形態學分量分析問題類似[26],因此可令從而有

這是一個求根LASSO問題,它對懲罰因子ρ 的取值依賴性并不明顯。利用凸優化工具包直接對該問題進行求解,則可以對真實與虛假的目標方位像進行重構。進而對包含目標的所有距離單元進行類似處理,即可實現目標的分離重構。
4.4 實驗結果
仿真實驗基于機載SAR平臺進行,雷達工作在正側視條帶成像模式。平臺參數如表1所示。仿真場景設置如圖5所示。其中虛像框內的目標分別標記為目標1,后續的分析將針對該目標進行。

表1 SAR參數設置Tab.1 SAR parameter setting
根據SAR系統參數可知,Ls=300 m。因此,場景中的真實目標與虛假目標各自以15 m的間隔均勻分布在 2Ls的方位范圍內。真實目標設置為N形,虛假目標為Z形。真實目標與虛假目標的各自的成像結果分別如圖5(a),圖5(b)所示。真實目標與虛假目標的散射點具有相同的幅度,但它們之間的相位會存在- /8至 /8之間的隨機誤差。由此產生的虛假目標能夠與真實目標之間發生疊加,使得對真實目標的辨識更加困難。欺騙干擾結果如圖5(c)所示。
構造式(18)中的優化問題進行目標重構。在求解過程中,我們令 ρ=1以便對稀疏性與剩余誤差進行同等加權。求解優化問題,對真實目標與虛假目標分別重構,可以得到圖6所示的重構結果。在該重構結果中,真實目標與虛假目標均能夠得到較好的重構,且由于重構字典中充分考慮了目標點的點散布函數,因此可以對目標實現超分辨重構。
5 結束語
本文針對目前日益復雜的SAR工作電磁環境,在有限的空間自由度(單通道)與時間自由度(固定波形)的條件下,基于真實回波與欺騙干擾形成機理的本質特征差異,探討了有效的虛假目標辨識方法與目標分離重構方法。干擾辨識方法通過不同的成像處理流程對兩者的差異特征進行了選擇性增強,并計算特征統計直方圖的匹配距離對特征進行增強從而實現虛假目標的有效辨識,從而對SAR圖像的篩選提供幫助,也縮小了目標分離重構算法的可行域。進一步利用動態合成孔徑對混合的真實SAR回波以及欺騙干擾進行觀測,建立目標重構的優化求解問題,實現了對真實目標以及虛假目標的超分辨分離重構,達到欺騙干擾抑制的目的。仿真實驗表明,目標的關鍵信息能夠在重構過程中較好地保留,從而保證欺騙干擾環境下對真實目標信息的有效獲取。

圖5 SAR場景設置與欺騙干擾結果Fig.5 SAR scenario setup and deceptive jamming results
在抗欺騙干擾實際應用中,需要根據具體場景的不同對算法進行取舍。對于不具有稀疏特性的虛假目標,可以利用差異特征增強的方法對其進行辨識。對于稀疏的虛假目標,也可以先通過虛假目標辨識減小目標分離重構問題的求解可行域,提高求解效率。然后根據計算資源以及重構性能的需求不同,采用不同精度目標分離重構算法對欺騙干擾進行分離,從而保證欺騙干擾環境下單通道SAR的信息獲取能力。
