基于參數(shù)估計的高分辨率SAR運動目標距離徙動校正方法
2019-04-04 01:33:20王巖飛劉碧丹
雷達學報 2019年1期
王 超 王巖飛 劉 暢 劉碧丹
①(中國科學院電子學研究所 北京 100190)
②(中國科學院大學 北京 100049)
1 引言
運動目標成像是SAR近年來研究的熱點問題。目標運動引起了多普勒中心、多普勒調頻率等回波參數(shù)的變化,這既為動目標檢測創(chuàng)造了條件,產(chǎn)生了前置濾波法[1]、反射特性位移法[2]等經(jīng)典方法,同時也帶來了距離徙動校正(Range Cell Migration Correction, RCMC)和方位聚焦的困難[1]。隨著成像雷達技術的發(fā)展,SAR的分辨率不斷提高,所需合成孔徑時間也不斷增加,精確進行RCMC已成為高分辨率運動目標成像面臨的關鍵問題[2,3]。
由于運動目標的回波參數(shù)是未知的,要實現(xiàn)精確的RCMC,必須通過回波數(shù)據(jù)估計運動參數(shù)。然而,運動目標的RCMC與參數(shù)估計存在固有的矛盾:一方面,RCMC的參數(shù)依賴于從數(shù)據(jù)中估計得到的運動參數(shù);另一方面,RCMC使目標回波包絡對齊,又是正確估計運動參數(shù)的前提條件。為解決這一矛盾,多數(shù)文獻[3-5]使用Keystone變換去除距離走動。雖然Keystone變換能夠實現(xiàn)盲速目標的距離走動校正,但存在3個問題:需要插值,計算量大;對距離向速度模糊的目標估計失效;后續(xù)成像步驟仍然需要估計多普勒中心。針對Keystone的這些缺點,文獻[6]提出采用硬件加速的方法提高運算速度以滿足實際應用需求;文獻[7]和文獻[8]分別提出非基帶差值法和解多普勒模糊法以解決多普勒中心混疊問題;第3個缺點也可通過后續(xù)增加多普勒中心估計步驟解決。但這些方案將不可避免地增加運算成本和算法復雜度。文獻[9]提出Hough變換檢測直線斜率的方法實現(xiàn)距離走動校正,能夠克服上述缺點,但先在時域作距離彎曲校正,在未知速度參數(shù)時確定方位時域中心較為困難。文獻[2]引入2階Keystone變換校正距離彎曲,該操作雖能實現(xiàn)盲速目標的距離彎曲校正,但同樣存在Keystone變換的缺陷。文獻[3]在距離彎曲校正時忽略目標方位向速度的影響,在高分辨率下目標速度對距離彎曲的影響較大,這一近似將造成距離彎曲校正不充分。文獻[10]在處理海面艦船運動目標時,提出先校正飛機速度造成的距離彎曲,再用高階相位擬合法估計和補償殘余距離彎曲,該方法依賴強散射點,效果不夠穩(wěn)定。
為解決上述問題,本文提出一種與參數(shù)估計相結合的RCMC方法。該方法分4步完成,首先通過Hough變換與能量均衡法相結合估計距離向速度,消除多普勒中心偏移并校正距離走動,然后以初始方位向調頻率在距離-多普勒域校正距離彎曲,再采用Map-drift估計精確的方位向調頻率,最后在距離-多普勒域校正殘余距離彎曲。與上述傳統(tǒng)方法相比,該方法計算量適中,性能穩(wěn)健,并且充分考慮高分辨率下殘余距離徙動的影響。應用該方法對仿真數(shù)據(jù)和實際數(shù)據(jù)進行處理,實驗結果表明,該方法能夠去除全部距離走動和距離彎曲,適用于高分辨率運動目標成像。
2 基于參數(shù)估計的運動目標距離徙動校正
2.1 運動目標回波分析
在斜距平面內,運動目標和載機(雷達)的相對位置關系如圖1所示。O為坐標原點,飛機以水平速度V勻速直線前進,在最近斜距為R0處有一速度為Vm的運動目標P,其距離向速度為Vr(遠離飛機為正),方位向速度為Va(與飛機同向為正)。經(jīng)過時間t,飛機運動到A點,此時飛機與目標的距離變?yōu)镽。

圖1 運動目標和載機的相對位置關系Fig.1 Relationship of moving target and radar
距離方程可以寫為式(1),并泰勒展開至2次項

其中,A0為回波反射系數(shù),ωa(t)為方位向包絡,t為方位向時間,τ為距離向時間,R(t)為雷達與目標間的瞬時斜距,Kr為距離向調頻率,λ為信號波長,c為光速。
將式(1)代入式(2),并忽略2次以上項,得到距離壓縮后的回波信號為

其中,A為常數(shù),Br為信號帶寬。
在式(3)中,第2個指數(shù)項為動目標多普勒中心偏移項,偏移量與運動目標徑向速度有關;第3個指數(shù)項為方位時間2次項,運動目標由于存在方位向速度,使得其調頻率相對靜止目標發(fā)生了變化;第4,第5個指數(shù)項分別為距離走動項和距離彎曲項,距離走動率與目標的徑向運動速度有關。
動目標的多普勒中心fdc和多普勒調頻率Ka可以表示為

時域內的距離走動Rwalk和 距離彎曲Rcurve可以表示為

從式(4)-式(7)可以看出,距離徙動與待估計的參數(shù)存在密切聯(lián)系,動目標距離向速度造成多普勒中心變化和距離走動,方位向速度造成調頻率變化和距離彎曲。
2.2 距離走動校正
對于距離壓縮后的運動目標回波,距離走動使目標軌跡基本呈一條直線,如圖2所示。直線的傾角與距離向速度的關系為

圖2 利用目標軌跡估計距離向速度Fig.2 Estimation of range velocity by target trajectory

其中,R為距離采樣間隔,F(xiàn)a是方位采樣率,θ為目標走動軌跡與方位向的夾角。
采用Hough變換可以估計出目標軌跡的傾角,然后由式(8)即可得到距離向速度的無模糊估計,并完成距離走動校正[9],一般情況下 α很小,Rwalk?Rcurve,因此在這一步無需考慮距離彎曲的影響。
Hough變換是從圖像特征出發(fā)的估計算法,因此估計得到的距離向速度不受多普勒中心模糊的影響。Hough變換的精度主要受變換步長的限制,為減少計算量,可以先對方位向做降采樣;另外,當距離向速度較小時,目標軌跡的線性特征不顯著,Hough變換的精度會受到一定影響。為提高Hough變換的精度和穩(wěn)定性,本文將Hough變換與能量均衡法[11]結合使用,先用Hough變換得到多普勒中心的粗略值,確定模糊數(shù),再利用能量均衡法得到精確的多普勒中心,然后進行距離走動校正。
與Keystone變換相比,結合能量均衡法的Hough變換計算量適中,估計值無模糊,可以一次性補償距離走動和多普勒中心偏移,在實際應用中是一種比較合理的方案。
2.3 距離彎曲校正
在分辨率較低時,可以認為運動目標的距離彎曲主要由飛機速度產(chǎn)生,忽略目標方位向速度進行距離彎曲校正[3]。設合成孔徑時間為Ts,由式(7)計算此近似造成的時域最大距離彎曲殘余

一般要求距離彎曲殘余應小于半個距離采樣間隔Rbin[11],即滿足式(10)時才能忽略方位向速度的影響。

代入1組實際參數(shù):R0= 15 km,V=80 m/s,Ts=11.3 s,Va=-6 m/s,求得ΔRcurve=1.06 m。若以過采樣率1.2計算,當分辨率高于2.5 m時距離彎曲殘余均超過半個距離采樣間隔。可見高分辨率成像時,目標方位向速度對距離彎曲的貢獻不能忽略。
把式(5)代入式(7),距離彎曲可表示為

由式(11)可知,只要獲得精確的調頻率就可以進行完全的距離彎曲校正。本文的調頻率估計采用Map-drift算法,該算法不依賴于強散射點,性能魯棒[12]。然而,在距離徙動殘余較大時,Map-drift的效果難以保證。因此,本文先利用飛機速度計算初始調頻率
并做1次粗校正,消除大部分距離彎曲,然后用Map-drift估計精確調頻率,最后根據(jù)式(11)再做1次精校正。
完成調頻率估計和距離彎曲精校正后,運動目標的回波包絡已對齊,且2階相位誤差已經(jīng)補償?shù)簟T趯嶋H數(shù)據(jù)處理時,回波中還殘余一些高階運動誤差,為了獲得更好的成像效果,可以使用PGA[13]對高階誤差再做一次估計。最后按照式(12)構造頻域參考函數(shù)進行聚焦成像。

2.4 目標加速度的影響
本文的RCMC算法基于式(1)的距離方程,基本假設是目標做理想的勻速直線運動,實際情況中應用更廣泛的是勻加速模型。當目標存在距離向加速度Ar和方位向加速度Aa時,距離方程變?yōu)?/p>

其中,α =(V-Va)2/(2R0)+Ar/2。
對比式(1)和式(13)可以看出,當距離方程展開到2次項時,1次項系數(shù)沒有變化,2次項系數(shù)包含距離向加速度Ar和方位向速度Va兩個變量,方位向加速度Aa出現(xiàn)在高次項中,可以忽略。
由式(4)-式(7)可知多普勒中心和距離走動量都沒有發(fā)生變化,而調頻率和距離彎曲均會發(fā)生改變。由于距離向加速度對距離彎曲的影響與距離無關,因此當存在距離向加速度時,只采用飛機速度校正距離彎曲將造成更為明顯的誤差。但由于式(11)的關系不變,因而上述算法中2步距離彎曲校正仍然成立。
2.5 算法流程
根據(jù)前面的理論分析,本文提出的高分辨率SAR運動目標RCMC算法流程如下:
(1) 對雷達原始回波數(shù)據(jù)完成距離壓縮和頻域濾波檢測;
(2) Hough變換估計距離走動軌跡斜率,結合能量均衡法得到距離向速度,完成距離走動校正;
(3) 用初始調頻率作距離彎曲粗校正,將大部分距離彎曲去除;
(4) Map-drift自聚焦,估計出精確的方位調頻率,同時可以得到方位向速度;
(5) 用精確的調頻率作距離彎曲精校正,將全部距離彎曲去除;
(6) 后續(xù)可以完成運動目標成像和定位:PGA估計高階殘余相位誤差,重聚焦得到目標圖像并標注在靜止圖像上。
本文算法流程如圖3所示。

圖3 本文算法流程圖Fig.3 Processing steps of the proposed method
3 仿真結果

表1 雷達仿真參數(shù)Tab.1 Parameters of simulation
仿真參數(shù)如表1和表2所示,以場景中心為坐標原點,設置了3個動目標。由式(4)計算3個目標的多普勒中心分別為-104.17 Hz, 1041.67 Hz, 1041.67 Hz,顯然目標2和目標3都是方位模糊的,模糊數(shù)為2。脈沖壓縮之后的回波軌跡如圖4所示,為便于顯示,距離向和方位向分別做了4倍和8倍降采樣,可以看到3個目標都存在嚴重的距離徙動。
首先進行距離走動校正,Hough變換之前把回波圖像作方位向4倍降采樣,距離步長取0.5,角度步長取0.02o;能量均衡法采用先負后正的濾波器,因而遞增過零點的位置即為基帶多普勒中心。為便于顯示,方位向做了8倍降采樣。
圖5(a)-圖5(c)是3個目標采用常規(guī)Hough變換校正距離走動的結果,可以看到無論是否模糊,Hough變換能夠校正大部分距離走動,但是由于估計精度不高,還殘留部分距離走動未能去除。尤其目標1的校正誤差較大,反映出常規(guī)Hough變換在距離向速度較低時精度較差。圖5(d)-圖5(f)是3個目標采用結合能量均衡法的Hough變換進行距離走動校正的結果,可以看到無論是否模糊,3個目標的校正效果都很好。表3列出了常規(guī)Hough變換和結合能量均衡法的Hough變換估計的距離向速度,二者對比可以看出,本文的算法明顯提升了距離向速度的估計精度和可靠性。

表2 目標仿真參數(shù)Tab.2 Parameters of simulated targets
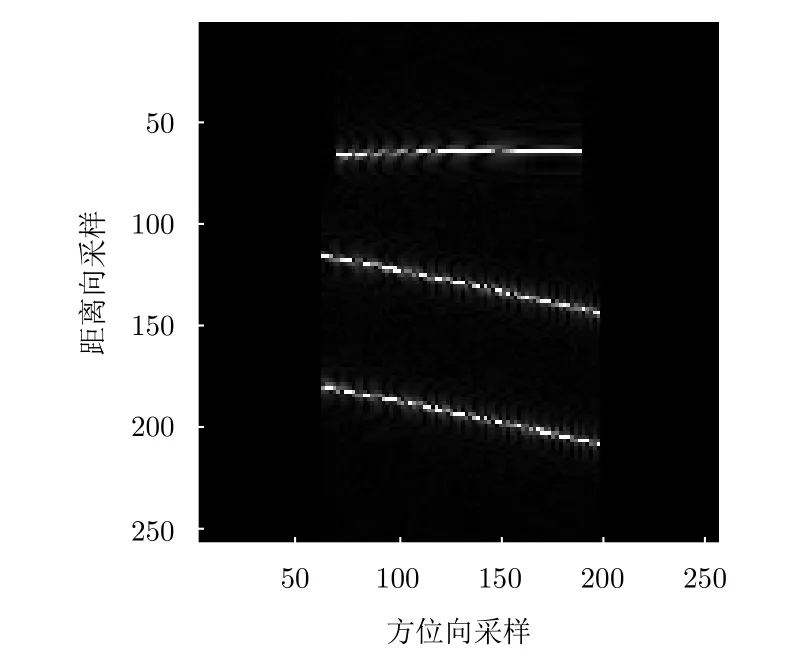
圖4 距離壓縮后的目標軌跡Fig.4 Target trajectories after range compression

圖5 距離走動校正效果對比Fig.5 Comparison of range walk correction
接下來進行距離彎曲校正,分別考察距離彎曲粗校正和距離彎曲精校正的結果,距離彎曲校正在2維頻域中完成;Map-drift的迭代終止條件設置為子圖偏移3個點以內。為便于顯示,方位向做了8倍降采樣,并對細節(jié)做了放大。
圖6(a)-圖6(c)分別是3個目標忽略方位向速度進行距離彎曲粗校正的結果,從放大后的圖像可以看到,目標1由于方位向速度較小且無距離向加速度,忽略目標速度對距離彎曲校正的影響不大,而目標2和目標3存在明顯的距離彎曲殘留。表4列出了真實調頻率和Map-drift估計的調頻率,二者對比可以看出,本文的算法能夠精確估計調頻率。用估計的調頻率進行距離彎曲精校正,得到圖6(d)-圖6(f),可以看出3個目標的距離彎曲已經(jīng)完全去除。
算法運算時間如表5所示,可以看到雖然本文算法的步驟更多,但是由于避免了Keystone變換,總體效率仍然大大優(yōu)于常規(guī)算法。
基于以上仿真分析,本文所提的基于參數(shù)估計的RCMC算法能夠實現(xiàn)高分辨率SAR運動目標的精確距離徙動校正,效果穩(wěn)定,計算量少,更適合實際應用。

表3 距離向速度估計結果Tab.3 Estimation results of range velocity

圖6 距離彎曲校正效果對比Fig.6 Comparison of range curvature correction
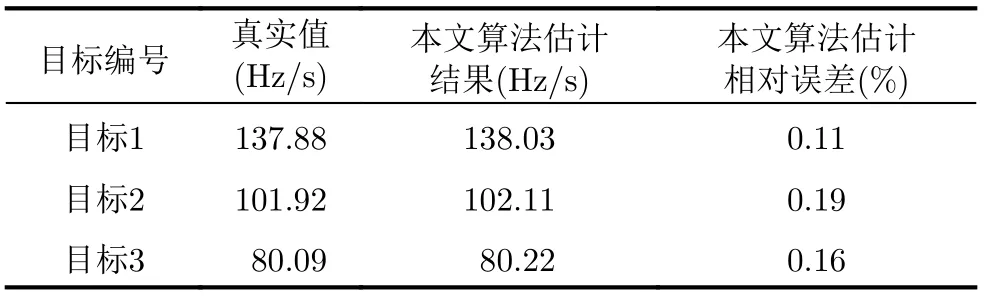
表4 方位向調頻率估計結果Tab.4 Estimation results of azimuth frequency rate

表5 算法運算時間Tab.5 Execution time of traditional method and proposed method
4 數(shù)據(jù)處理結果

表6 實測數(shù)據(jù)參數(shù)Tab.6 Parameters of real data
實測數(shù)據(jù)來自電子所某機載Ku波段高分辨率SAR雷達,參數(shù)見表6。
一段包含運動目標的距離-多普勒域數(shù)據(jù)如圖7(a)所示,水平方向為距離向,垂直方向為方位向。其中包含兩個目標,分別命名為PT1和PT2。采用前置濾波法[14]可以濾除方位向零頻附近的地雜波,提高CFAR檢測的信雜比。由于這段數(shù)據(jù)的兩個目標頻譜有交叉,因此雜波抑制后在時域進行CFAR檢測并分離回波,CFAR結果如圖7(b)所示。為便于顯示,方位向做了32倍降采樣。

圖7 動目標檢測結果Fig.7 Detection of moving targets

圖8 結合能量均衡法的Hough變換結果Fig.8 Results of Hough transform with energy balancing method
按照本文算法分別對PT1和PT2進行處理,首先對信號作結合能量均衡法的Hough變換,結果如圖8所示。為減小計算量,變換之前將信號方位向做了8倍降采樣。Hough變換的距離步長取0.5,角度步長取0.02o。
Hough變換估計出的PT1/PT2時域軌跡與方位向夾角分別為88.17°和88.45°,求得距離向速度分別為-5.67 m/s和-5.12 m/s,換算為模糊數(shù)均為0,能量均衡法估計的基帶多普勒中心為437.78 Hz和501.312 Hz,換算為距離向速度分別為-4.82 m/s和-4.21 m/s,按此速度進行距離走動校正的結果如圖9(a),圖9(d)所示,可以看到線性走動基本被消除。忽略目標速度和加速度進行距離彎曲粗校正后,結果如圖9(b),圖9(e)所示,可以看出仍然殘余相當大的距離彎曲,若不去除將影響后續(xù)的聚焦成像。Map-drift估計得到的PT1/PT2的調頻率分別為32.09 Hz/s和210.90 Hz/s,按此調頻率作距離彎曲精校正后,結果如圖9(c),圖9(f)所示,可見回波基本呈一條直線,殘余徙動已經(jīng)遠小于1個距離門,說明絕大多數(shù)距離徙動已經(jīng)消除。
圖10是將動目標重新聚焦后,標記在靜止場景上的合成SAR圖像,橫向為距離向,縱向為方位向,距離采樣間隔0.15 m,方位采樣間隔0.22 m。可以清楚地看到2個動目標位于公路上,且目標聚焦良好,說明本文的RCMC算法取得了預期效果。

圖9 RCMC效果對比Fig.9 Comparison of RCMC
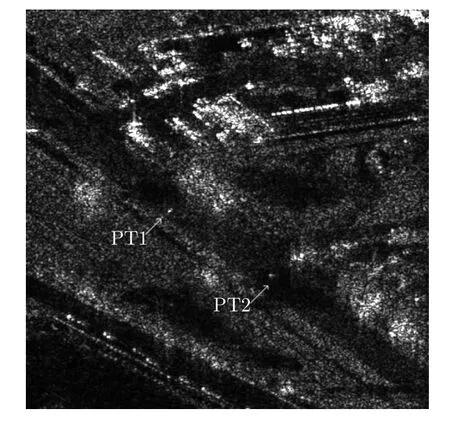
圖10 動目標精確成像并定位的合成SAR圖像Fig.10 Composite SAR image with stationary scenes and focused moving targets
5 結論
本文研究了高分辨率地面運動目標的距離徙動校正問題。為解決RCMC與參數(shù)估計之間的矛盾,提出一種結合參數(shù)估計的RCMC方法,提高RCMC的精度,有利于實現(xiàn)運動目標的聚焦成像和準確定位。該方法適用于高分辨率單天線SAR,具有運算量小、性能穩(wěn)健的優(yōu)點。仿真數(shù)據(jù)和實際SAR數(shù)據(jù)的處理結果驗證了本文所提算法的有效性。
