一種視覺導(dǎo)引AGV叉車傾斜畸變自標(biāo)定方法
2019-04-03 00:47:58樓佩煌錢曉明
物流技術(shù) 2019年3期
張 悅,樓佩煌,錢曉明,武 星
(南京航空航天大學(xué) 機(jī)電學(xué)院,江蘇 南京 211100)
1 引言
隨著工廠自動化程度不斷提高,自動導(dǎo)引叉車應(yīng)用越來越廣泛,采用的導(dǎo)引方式包括激光,磁帶,視覺等,其中視覺導(dǎo)引以其低成本、高可靠性受到廣泛研究與應(yīng)用[1]。視覺導(dǎo)引一般是由視覺系統(tǒng)通過識別環(huán)境中鋪設(shè)特殊標(biāo)識線和符號作為預(yù)定義路徑,并測量AGV相對導(dǎo)引路徑的位置偏差和角度偏差完成既定路徑導(dǎo)引任務(wù)[2]。
在計算機(jī)視覺系統(tǒng)中,主要有單目視覺相機(jī)和雙目相機(jī)。兩種方式均廣泛應(yīng)用于導(dǎo)引、測距以及障礙物檢測。單目的結(jié)構(gòu)簡單,它避免了可視化數(shù)據(jù)混合,并且可以輕松實現(xiàn)實時監(jiān)控。我們可以通過攝像頭獲得目標(biāo)的位置和特征。單目保證不同坐標(biāo)系中的位置關(guān)系一致[3-5]。Gang Chen等人提出了一種整合卡爾曼的方法對視覺傳感器濾波,通過單目立體視覺系統(tǒng)校準(zhǔn)實現(xiàn)完整的線性成像,測量叉車與托盤距離[6]。
Jittima Varagul基于視覺,結(jié)合神經(jīng)網(wǎng)絡(luò)的方式進(jìn)行障礙物檢測[7]。俄勒岡理工學(xué)院通過車本身攝像頭避障,通過安裝在天花板上的攝像頭確定位置[8]。視覺測量系統(tǒng)中,因為攝像頭安裝方式不同,圖像傾斜畸變是一個不可忽視的問題[9]。國內(nèi)外對于傾斜畸變進(jìn)行了多年研究,并提出了多種方法,汪貴平等提出了根據(jù)特征平行線進(jìn)行畸變校正,該方法提取視野圖像中包含的多條特征直線,利用直線對應(yīng)關(guān)系得到畸變參數(shù),并以這些參數(shù)反演迭代實現(xiàn)對透視畸變的校正[10]。楊麒等提出了基于直線投影特征的鏡頭畸變校正算法,根據(jù)直線三點投影關(guān)系,用遺傳算法得到最優(yōu)解[11]。以上兩種方法均動態(tài)求解攝像機(jī)內(nèi)外參數(shù),無法避免因為計算量復(fù)雜而帶來的實時性問題。
為提高測量精度及實時性,喻俊等人采用靜態(tài)標(biāo)定攝像機(jī)內(nèi)參數(shù),動態(tài)標(biāo)定外參數(shù)的系統(tǒng)標(biāo)定方法,該方法主要針對攝像頭垂直安放,先用張定有算法靜態(tài)標(biāo)定出攝像機(jī)內(nèi)參數(shù),然后在運動狀態(tài)對圖像進(jìn)行動態(tài)標(biāo)定[12]。
本文重點解決攝像頭傾斜安裝畸變問題,提出了一種基于透視原理,采用固定寬度色帶路徑,改進(jìn)Hong變換運算求解邊界,得到透視點,進(jìn)行實時、多場景自動傾斜標(biāo)定的方法。它不僅可以精確測量路徑信息,車體到托盤及標(biāo)志點距離,而且可以動態(tài)標(biāo)定,根據(jù)場景進(jìn)行自我標(biāo)定的特點,同時具有運算簡單,可靠性高,有利于嵌入式應(yīng)用。
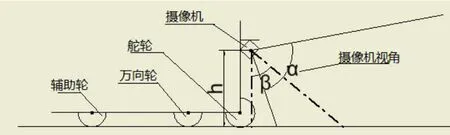
圖1 視野范圍水平線以上
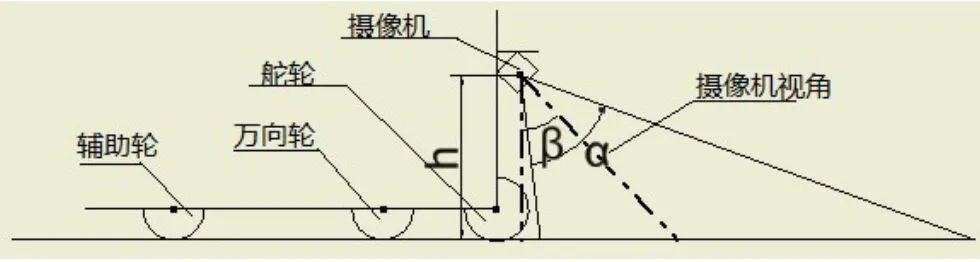
圖2 視野范圍水平線以下
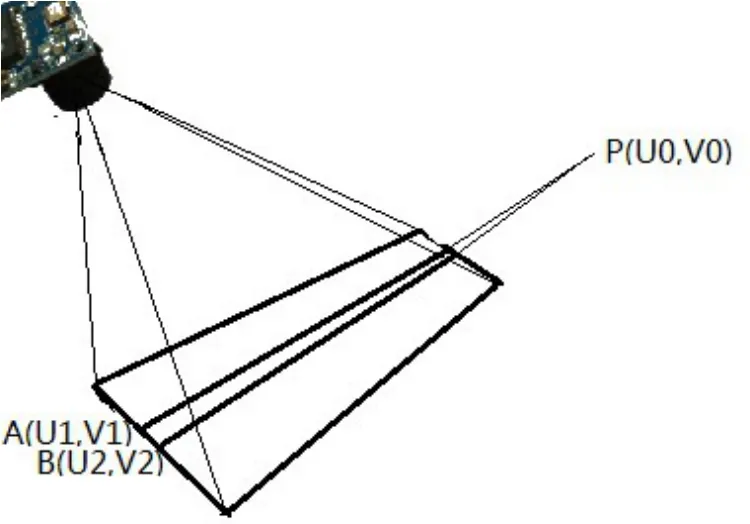
圖3 攝像機(jī)透視原理立體模型
2 視覺導(dǎo)引系統(tǒng)建模
2.1 視覺導(dǎo)引系統(tǒng)模型
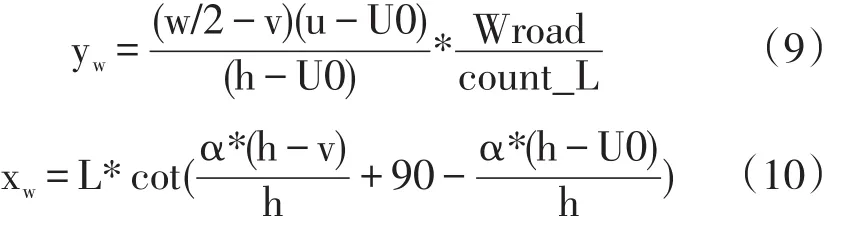
本文應(yīng)用視覺導(dǎo)引模型如圖1、圖2和圖3所示,自動導(dǎo)引叉車用舵輪驅(qū)動和轉(zhuǎn)向,萬向輪提高舵輪轉(zhuǎn)向的平穩(wěn)性,輔助輪在貨叉取貨時保持車體方向的穩(wěn)定性。本文所用CCD攝像機(jī)視角范圍在85度左右,當(dāng)攝像機(jī)傾角介于46.5度上下范圍時,產(chǎn)生圖1、圖2兩種視覺導(dǎo)引模型。對于圖1模型,視野范圍在水平線以上,即理論上,攝像頭可拍攝到地面無窮遠(yuǎn),由透視原理,無窮遠(yuǎn)處所有直線匯聚到一點,即為透視點。此時透視點在圖像坐標(biāo)系下坐標(biāo)為P(U0,V0)。對于圖2b模型,視野范圍在水平線以下,透視點不在攝像機(jī)廣角范圍內(nèi),但由攝像頭成像對應(yīng)關(guān)系,依然可以計算出虛擬透視點在圖像坐標(biāo)系下坐標(biāo)為P(U0,V0)。
與垂直安裝方式相比,攝像頭視野范圍較大,測量反饋信息較多,但也面臨著傾斜畸變,光源復(fù)雜,路徑及標(biāo)志信息提取困難等諸多問題。本文提出的視覺模型及預(yù)期效果如圖4所示,圖5是路徑在攝像機(jī)坐標(biāo)系下的圖像模型,圖4是二維地面坐標(biāo)系圖像,在對圖像進(jìn)行傾斜畸變校正處理后,以期在視野范圍內(nèi),能實現(xiàn)實時標(biāo)定并精準(zhǔn)反映出色帶寬度,車體色帶傾斜角度,車體標(biāo)志點距離,車體托盤距離等。
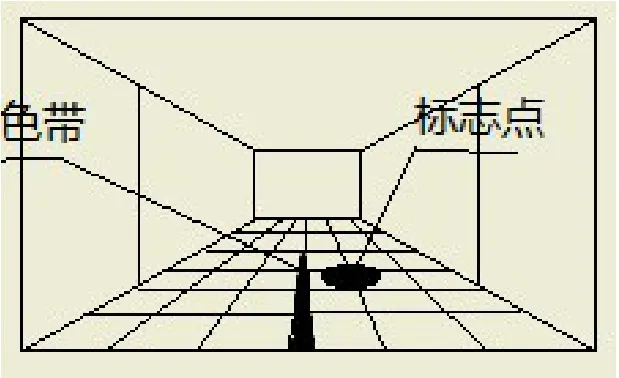
圖4 原始圖像
2.2 徑向畸變校正
為提高識別精度,同時提高識別準(zhǔn)確率和識別速率,本文首先在靜止?fàn)顟B(tài)下對攝像頭進(jìn)行畸變校正。鏡頭的非線性畸變有徑向畸變、離心畸變和薄棱鏡畸變等。光學(xué)鏡頭徑向曲率的變化是引起徑向變形的主要原因。在大多數(shù)情況下后兩者的畸變可以忽略不計。
視覺各坐標(biāo)系關(guān)系如圖6所示,Oc為攝像機(jī)坐標(biāo)系,Oi為圖像像素坐標(biāo)系,Ow為世界坐標(biāo)系,Od為實際圖像物理坐標(biāo)系,Ou為理想物理坐標(biāo)系。

圖5 校正后圖像
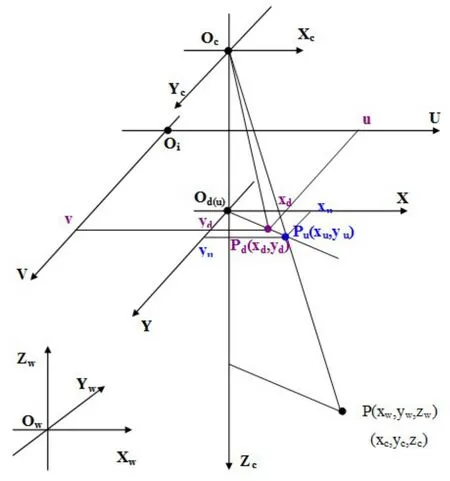
圖6 視覺各坐標(biāo)系關(guān)系圖
攝像機(jī)內(nèi)參數(shù)矩陣

帶入式(1),理想圖象坐標(biāo)系與世界坐標(biāo)系關(guān)系
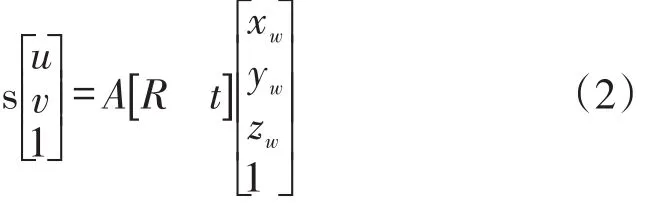
其中s是縮放因子,R是旋轉(zhuǎn)矩陣,t為平移矩陣。采用張定有標(biāo)定法將圖7進(jìn)行標(biāo)定,結(jié)果如圖8所示。
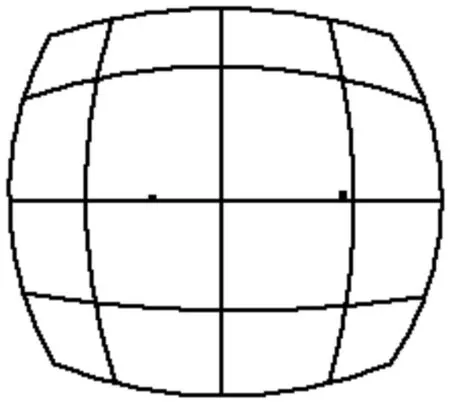
圖7 圖像畸變示意圖

圖8 畸變校正示意圖
2.3 圖形預(yù)處理
叉車采用單目CCD攝像機(jī)采集圖像,圖像格式為YCbCr格式,為提高運算效率,本文只提取Cb分量,即提取藍(lán)色分量部分。處理器用Ti公司的DM642,導(dǎo)引路徑為藍(lán)色色帶,提取圖像藍(lán)色分量部分,用3X3線性中值濾波器進(jìn)行濾波處理,處理結(jié)果如圖9所示。

圖9 預(yù)處理圖像
2.4 邊緣檢測
邊緣檢測會受到周圍環(huán)境的影響,尤其是光照情況的改變。張穎提出一種基于光照色彩模型的自適應(yīng)圖像照度動態(tài)分區(qū)方法,采用了分區(qū)域模型,本文將光照處理與路徑提取結(jié)合起來。
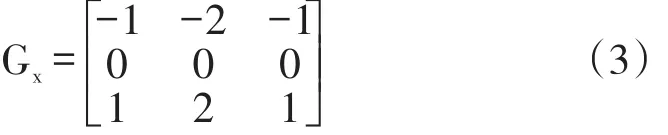
傳統(tǒng)的Sobel算子主要用于邊緣檢測,分別為橫向及縱向模板。模板與圖像進(jìn)行卷積運算,得到梯度近似值。何春華等提出了權(quán)值的自適應(yīng)算法,以此來增強(qiáng)圖像的抗噪能力[13],沈德海等增加了斜向兩個模板,進(jìn)行四個方向的提取[14],本文主要對于縱向邊界進(jìn)行提取,在橫縱模板進(jìn)行運算的基礎(chǔ)上,加大縱向模板權(quán)重,減少甚至避免由于光照影響或周圍環(huán)境造成的非期望被提取直線。
水平橫向模板
水平縱向模板
圖像的每一個像素的梯度大小:
而后可用如下公式估算梯度方向大小。
本文通過G和P作為邊界選取條件,設(shè)定P為1,G優(yōu)選為15,處理結(jié)果如圖10所示,圖像中幾乎無干擾和錯誤信息被提取。

圖10 改進(jìn)Sobel提取
2.5 邊界線提取
在圖象XY坐標(biāo)系下,過點(x,y)的直線的方程為:

其中:p為斜率;q為截距
由此可知,在參數(shù)空間里面相交于同一個點的所有直線在圖像空間里面都有共線的點與之對應(yīng),這就是點-線的對偶性。
Hough變換根據(jù)點-線的對偶性把直線檢測問題轉(zhuǎn)化為參數(shù)求解。
將式(7)進(jìn)行極坐標(biāo)方程轉(zhuǎn)換,如式(8)

霍爾夫變換通過建立參數(shù)(λ,θ)的二維數(shù)組累加器,改變滿足式(8)參數(shù)方程的目標(biāo)點對應(yīng)參數(shù)累加器數(shù)值,按累加器數(shù)值降序列出預(yù)定義數(shù)量的目標(biāo)直線參數(shù),完成直線檢測。
霍爾夫變換極值角度關(guān)系曲線如圖11所示,共線點的參數(shù)方程交于一點,并在圖中由白色方塊標(biāo)注,其在圖像中直線對應(yīng)關(guān)系如圖12所示,圖12展示了改進(jìn)霍爾夫變換的直線檢測結(jié)果。

圖12 改進(jìn)霍爾夫直線檢測結(jié)果
2.6 傾斜標(biāo)定
改進(jìn)Hough變化得到了兩條及以上的直線,所有直線在無窮遠(yuǎn)出必相交于一點,兩側(cè)垂直直線除外如圖12所示。求得所有直線交點P(U0,V0),即為圖像在地面上的透視點。兩條直線與圖象上底邊的交點,即起始出發(fā)點記為A(U1,V1),B(U2,V2),圖像中路徑寬度像素count_L=V2-V1。
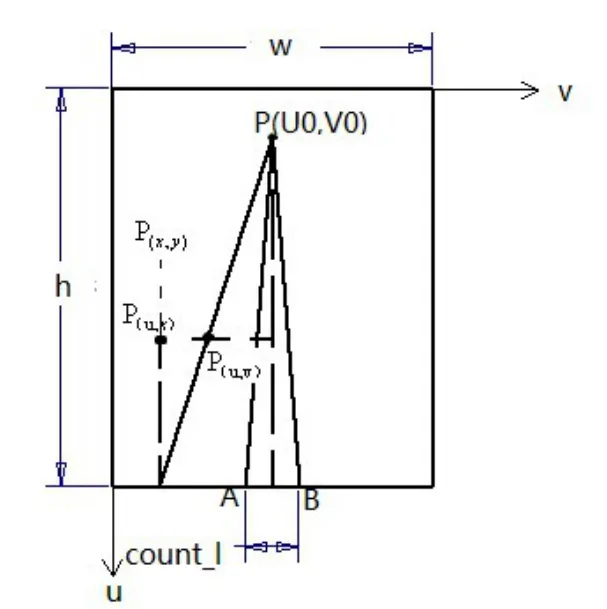
圖13 透視原理平面模型

圖14 透視原理側(cè)平面模型
由于攝像機(jī)特性,傾斜安裝時,單位角度像素數(shù)為線寬與攝像機(jī)視角之比,即單位角度內(nèi)圖像橫向或縱向的像素數(shù)目相同。
基于透視點標(biāo)定原理圖像行坐標(biāo)為u,列坐標(biāo)為v。所有直線在無窮遠(yuǎn)處交于透視點,即其在地面坐標(biāo)系上有相同的縱坐標(biāo),由此:
其中:xw-地面坐標(biāo)系x坐標(biāo);
yw-地面坐標(biāo)系y坐標(biāo);
w-圖像像素寬度;
h圖像像素長度;
Wroad-色帶真實寬度;
Count_l-圖像中色帶最大寬度像素數(shù);
L-攝像機(jī)安裝高度。
3 實驗結(jié)果分析
3.1 垂直路徑標(biāo)定結(jié)果
對于平面標(biāo)定完成以后,將標(biāo)定后參數(shù)應(yīng)用于圖像,為了更直觀的展現(xiàn)標(biāo)定結(jié)果,本文用插補(bǔ)計算方法,按照計算所得畸變參數(shù),對地面二位場景進(jìn)行校正還原,得到圖像如圖16所示。圖15是原始單一藍(lán)色分量提取圖像,圖16是標(biāo)定完成后的藍(lán)色單一分量圖像,對于圖像的中下窗口部分,垂直路徑信息被準(zhǔn)確清晰地反映出來。

圖15 原始圖像

圖16 標(biāo)定后的圖像
3.2 距離測試標(biāo)定結(jié)果
當(dāng)前檢測叉車到托盤距離的方法一般采用光學(xué)或聲學(xué)傳感器等,測量的成本較高,測量的精度也未能達(dá)到預(yù)期效果。本文采用視覺進(jìn)行距離測量,測量誤差兩米范圍內(nèi)在1mm以內(nèi),角度誤差1度以內(nèi)。圖17是測量前結(jié)果,圖18反映了視野中任意兩點距離測量結(jié)果。
圖19 是圖像選擇了10組10個等距標(biāo)志點進(jìn)行兩兩測距的誤差統(tǒng)計,x軸表示每一組所選距離,y軸表示每組平均誤差。由圖可知,在本文標(biāo)定范圍內(nèi),測量誤差在2mm以內(nèi),圖20是圖像選擇了10組10個兩兩之間等角度斜線與色帶的角度誤差統(tǒng)計,x軸表示每一組所選角度,y軸表示每組平均誤差。由圖可知,在本文標(biāo)定范圍內(nèi),測量誤差在1度以內(nèi)。
3.3 魯棒性分析
在相同地面高度與攝像機(jī)傾斜角度的情況下,選取不同的試驗場景,包括多條色帶場景,光照干擾場景,傾斜色帶場景,混合色帶場景等多種情況,計算平面透視點縱坐標(biāo)偏差不超過5%,這種情況對于最終標(biāo)定結(jié)果幾乎沒有影響,圖21是多條色帶原始圖像,圖22是經(jīng)校正后的結(jié)果。
3.4 實時性分析
自動搬運車控制系統(tǒng)要求有較高的實時性,本文采用DM642高速處理器,間隔掃描方式,每10次數(shù)據(jù)處理完成指示燈閃爍一次,通過記錄特定時間內(nèi)指示燈閃爍次數(shù)來計算處理速度,表1是自動搬運車不同速度下所需最小平均處理時間,衡量標(biāo)準(zhǔn)是AGV不脫離路徑并能順利識別工位點,停車精度在10mm以下,最終處理頻率在12Hz,完全達(dá)到導(dǎo)引要求。
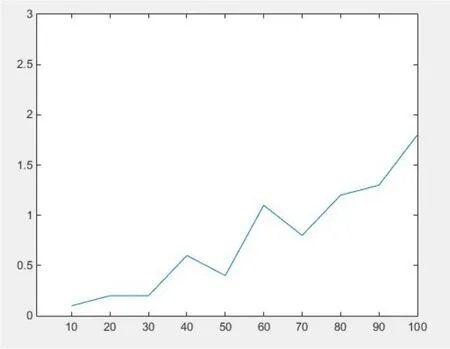
圖19 等距誤差統(tǒng)計
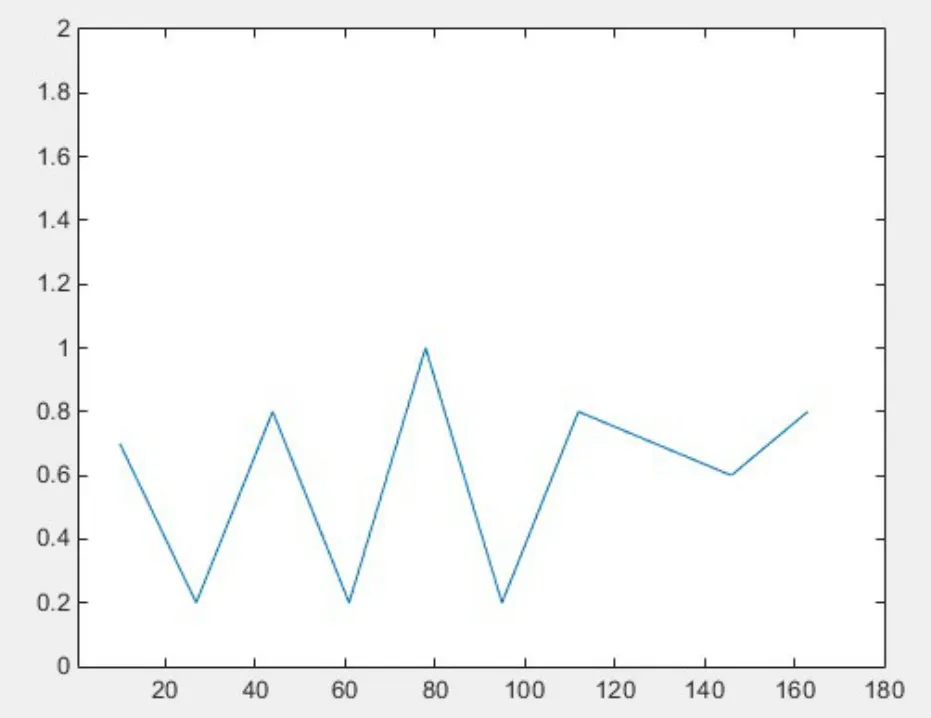
圖20 傾斜誤差統(tǒng)計

表1 不同速度所需最小處理頻率
4 結(jié)論
本文提出了一種可根據(jù)導(dǎo)引色帶進(jìn)行動態(tài)標(biāo)定的方法,該方法對采集圖像濾波處理后,采用增大縱向模板權(quán)值的Sobel算子提取邊界,改進(jìn)霍夫變換查找邊線方程,計算圖像地面坐標(biāo)系下的透視交點,進(jìn)行傾斜畸變校正。從實驗結(jié)果分析,可以看出本文提出的方法測量精度高,可精確感知車體托盤距離,控制系統(tǒng)魯棒性、實時性較好,對提高單目視覺自動導(dǎo)引叉車視覺導(dǎo)引精度,以及叉車對接托盤過程中實時測距具有實用價值。

圖21 多色帶原始圖像

圖22 校正處理圖像
