風電齒輪箱微觀修形對振動與聲振粗糙度性能的影響
2019-04-02 06:14:58范孝良石鵬飛劉建民
中國工程機械學報 2019年1期
范孝良,石鵬飛,劉建民
(華北電力大學 機械工程系,河北 保定 071003)
目前,兆瓦級風電機組的主流機型分為雙饋型風力發(fā)電機和直驅永磁型風力發(fā)電機兩種.在結構件組成上,雙饋型較直驅型風力發(fā)電機最大的不同在于有風電齒輪箱.雖然直驅永磁型風力發(fā)電機是以后的發(fā)展方向,但是由于永磁型風力發(fā)電機制造成本較高,目前大部分的風電制造商還是以雙饋型風力發(fā)電機為主.風電齒輪箱的齒面磨損、齒面膠合、齒面點蝕和齒根斷裂等故障率較高,國內外眾多學者對風電齒輪箱也作了大量研究.江明民[1]應用Ansys軟件對兆瓦級風電齒輪箱的斜齒輪進行參數(shù)化建模,對其進行齒面接觸分析.趙登麗等[2]采用多目標齒輪修形對風電齒輪箱高速級齒輪進行微觀修形,降低了其承載能力.
本文在上述研究的基礎上(有的學者只考慮了齒向修形,有的學者只考慮了齒廓修形,針對風電齒輪箱的微觀修形,并沒有一套完整的修形方案),采用齒向修形和齒廓修形相結合的方法,對2 MW風力發(fā)電機齒輪箱各級均進行了微觀修形.對修形前、后的齒輪箱各級齒輪進行分析,得出齒輪微觀修形結果,改善了輪齒嚙合間的承載能力,有效地降低了齒輪副間的傳動誤差,進而提高了風電齒輪箱的噪聲、振動與聲振粗糙度(Noise Vibration Harshness,NVH)性能,抑制了齒輪箱的振動噪聲現(xiàn)象發(fā)生.
1 齒輪微觀修形理論分析
1.1 齒向修形理論分析
齒向修形通常分為齒向鼓形修形、齒向螺旋線修形和齒端修形.齒向鼓形主要是為了補償輪齒在制造時的誤差和輪齒嚙合時的彈性變形[3].ISO標準給出了關于齒向鼓形量的計算公式為
(1)
式中:Fβxcv為等效嚙合錯位量.
臺勞布朗公司給出了關于齒向鼓形量的計算公式為[4-5]
(2)
式中:Fm為傳動圓周力;b為工程齒寬.
從式(1)和式(2)可以看出:ISO標準僅考慮了齒輪間的嚙合錯位量對齒向鼓形量的影響,臺勞布朗公式只考慮了齒面接觸載荷對齒向鼓形量的影響,方法上并未實現(xiàn)統(tǒng)一.因此,本文兼顧兩者的優(yōu)點,參考相關文獻提出了一種既考慮齒輪間的嚙合錯位量,又考慮了齒面接觸載荷對齒向鼓形量影響的方法.
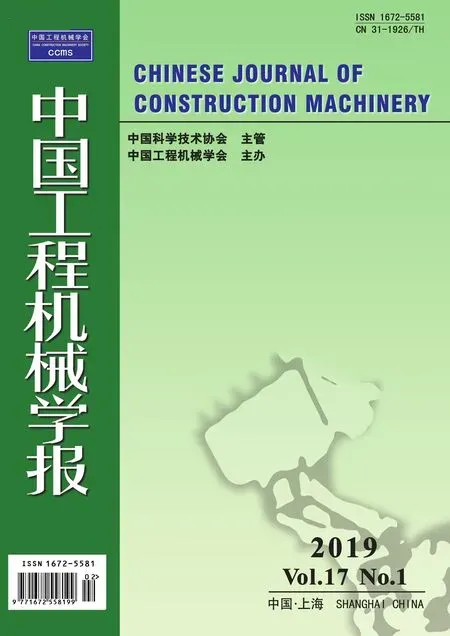
假設載荷沿齒寬分布規(guī)律為線性的,經(jīng)相關推理計算可以得出
(3)
式中:bca為齒輪有效接觸寬度;Fβy為齒輪的嚙合歪斜度;Cγ為輪齒嚙合綜合剛度.

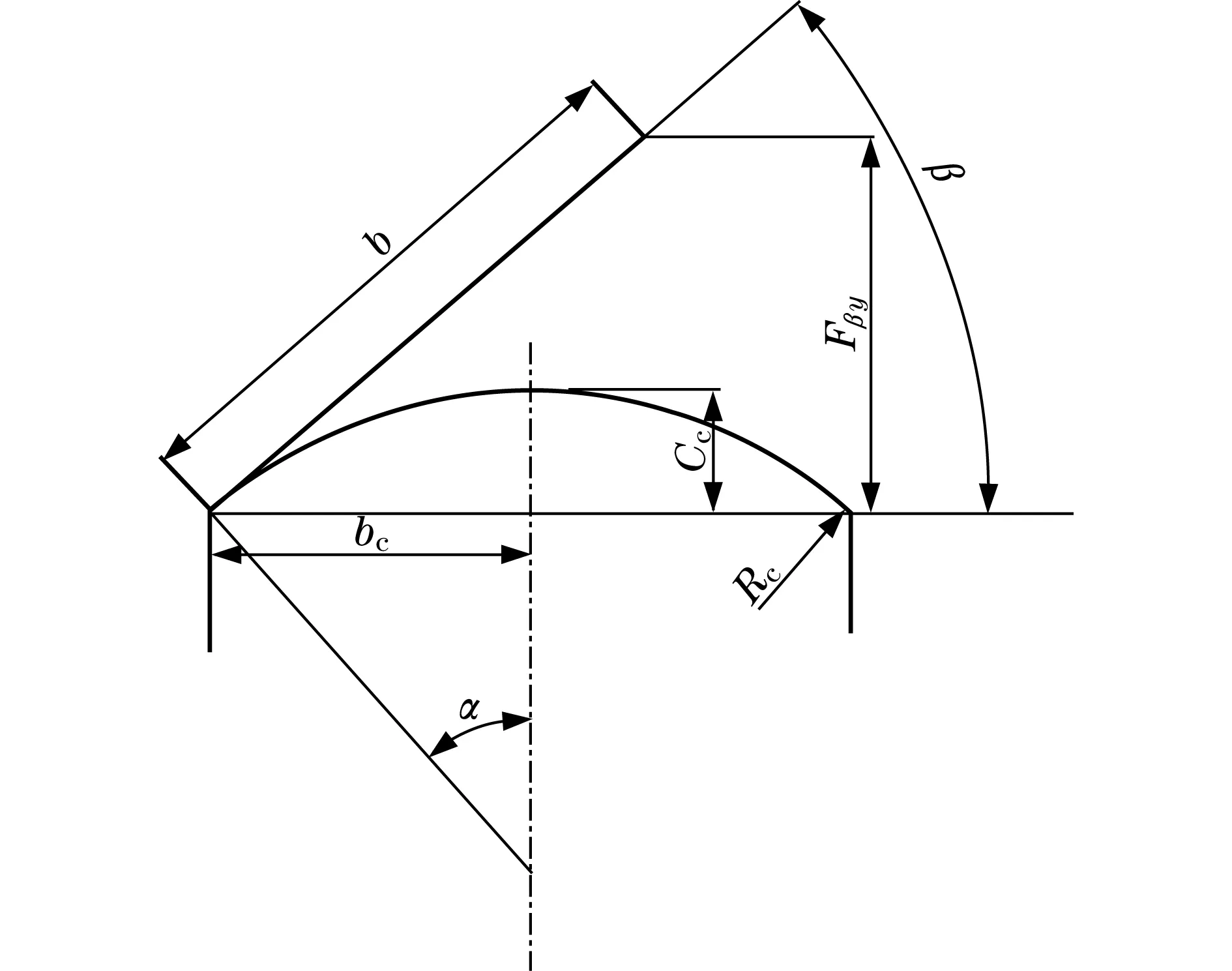
圖1 齒向鼓形量計算解釋圖Fig.1 Computational interpretation diagram oflead crown
(4)

(5)
鼓形量為
(6)
螺旋線修形量(齒向斜率)為
(7)
齒端修形一般分為直線和拋物線兩種修形方式,其計算公式為
(8)
式中:B為齒寬.
1.2 齒廓修形的理論方法
在理想的齒輪嚙合狀況下,一對正常嚙合的齒輪基節(jié)相等,但在實際的嚙合傳動過程中,由于接觸變形的存在,導致一對嚙合的齒輪基節(jié)不再相等.嚙入和嚙出時的沖擊會導致應力迅速變大,為了緩解因嚙入和嚙出沖擊導致的應力驟增現(xiàn)象,采用去除輪齒干涉的部分材料的齒廓修形方式[6-7].
ISO 6336齒輪標準中針對齒廓鼓形修形量給出的推薦公式為
(9)
式中:KA為某工況下的系數(shù);Ft為齒輪切向力;εα為齒輪端面重合度.
齒輪手冊中針對齒輪齒廓的齒頂或齒根給出的推薦公式[8]為
(10)
式中:Wt為齒寬載荷.
關于齒輪輪齒齒廓的修形曲線大致分為直線修形方式和拋物線修形方式,其修形量為
(11)
式中:δ為修形齒輪某一點的修形量;χ為嚙合點坐標;b為齒廓修形曲線的指數(shù),當b=1時修形曲線為直線修形,當b=2時修形曲線為拋物線修形;L為嚙入起點或終點到單齒嚙合起點或末點.
2 基于Romax的齒輪微觀修形分析
2.1 風電齒輪箱建模
本文分析的是2 MW風電機組齒輪箱,其傳動形式為一級行星加兩級平行的結構.根據(jù)2 MW風電齒輪箱的相關參數(shù),同時將行星架、箱體和扭力臂以柔性體形式導入到Romax中,建立風電齒輪箱剛柔耦合模型,如圖2所示.
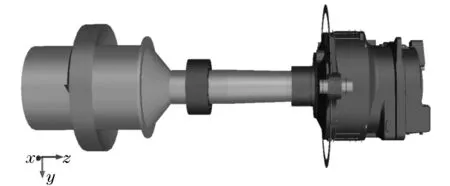
圖2 2 MW風電齒輪箱剛柔耦合模型Fig.2 2 MW rigid-flexible coupling model ofwind power gear box
2.2 齒輪微觀修形數(shù)據(jù)
齒輪微觀修形數(shù)據(jù)根據(jù)上一節(jié)分析的齒輪微觀修形理論,結合工程實踐微觀修形的可操作性及修形便利性進行取整.經(jīng)Romax多次分析實驗,得到了該齒輪箱合理的微觀修形數(shù)據(jù),如表1所示.
表1 各齒輪各修形方向上的修形量Tab.1 Tip easing quantities of each gear ineach modification direction
2.3 齒輪微觀修形前后對比
以一級行星齒輪傳動為例進行對比分析.首先對修形前、后的傳動誤差進行了對比分析,結果如圖3~圖6所示.
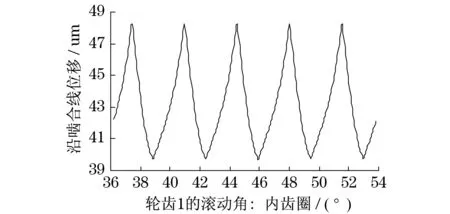
圖3 修行前內齒圈與行星輪間傳動誤差Fig.3 Transmission error between annular gear andplanetary gear before modification

圖4 修行后內齒圈與行星輪間傳動誤差Fig.4 Transmission error between annular gear andplanetary gear after modification

圖5 修行前太陽輪與行星輪間傳動誤差Fig.5 Transmission error between sun gear andplanetary gear before modification

圖6 修行后太陽輪與行星輪間傳動誤差Fig.6 Transmission error between sun gear andplanetary gear after modification
對一級行星級齒輪傳動修形前、后的傳動誤差進行對比分析,發(fā)現(xiàn)傳動誤差明顯降低,同時沿嚙合線位移的峰值處由尖銳變得非常緩慢.太陽輪與行星輪的嚙合,修形前傳動誤差為14.64,修形后降低到6.58,下降了55.1%.內齒圈與行星輪嚙合,修行前傳動誤差為8.06,修形后降低到4.74,下降了41.2%.
對修形前、后齒輪輪齒的承載能力進行了對比分析,結果如圖7~圖10所示.

圖7 太陽輪與行星輪間修形前承載能力Fig.7 Bearing capacity between sun gear andplanetary gear before modification

圖8 太陽輪與行星輪間修形后承載能力Fig.8 Bearing capacity between sun gear andplanetary gear after modification
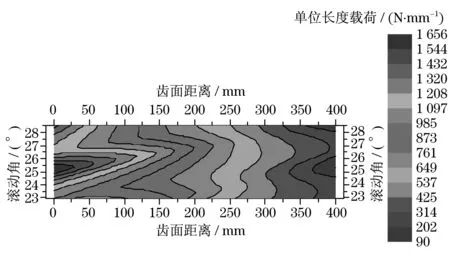
圖9 內齒圈與行星輪修形前承載能力Fig.9 Bearing capacity between annular gear andplanetary gear before modification

圖10 內齒圈與行星輪修形后承載能力Fig.10 Bearing capacity between annular gear andplanetary gear after modification
經(jīng)過對一級行星級齒輪傳動的承載能力進行對比分析,發(fā)現(xiàn)齒輪的微觀修形解決了未修形之前的一端接觸問題,改善了其承載能力.同時,單位長度載荷也有了大幅度的降低.
3 風電齒輪箱的NVH性能分析
3.1 測量節(jié)點的設定
本文采用臺架實驗的方法對風電齒輪箱振動情況進行測量,選取圖11和圖12中的3個節(jié)點作為被測齒輪箱的動態(tài)性能部位.

圖11 扭力臂網(wǎng)格文件Fig.11 Mesh file of scissor link
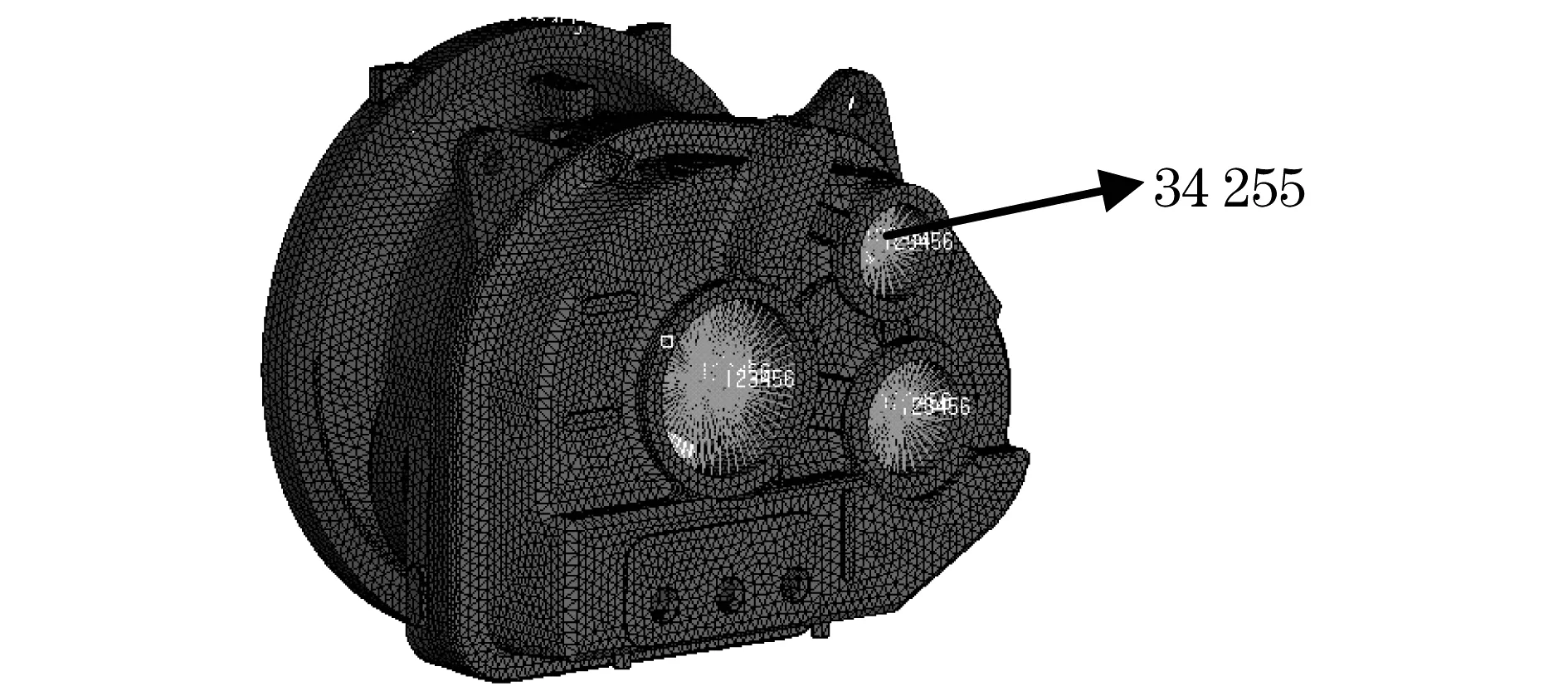
圖12 箱體網(wǎng)格文件Fig.12 Mesh file of cabinet
3.2 測量結果分析
通過Romax Designer動力學仿真,模擬臺架實驗得到修形前、后在一級齒輪傳動誤差的一階諧波激勵和齒輪嚙合剛度激勵下的各關鍵位置處節(jié)點響應結果,如圖13~圖18所示:

圖13 修行前箱體34 255節(jié)點處的動態(tài)響應結果Fig.13 Dynamic response result at node 34 255 ofthe box body before modification
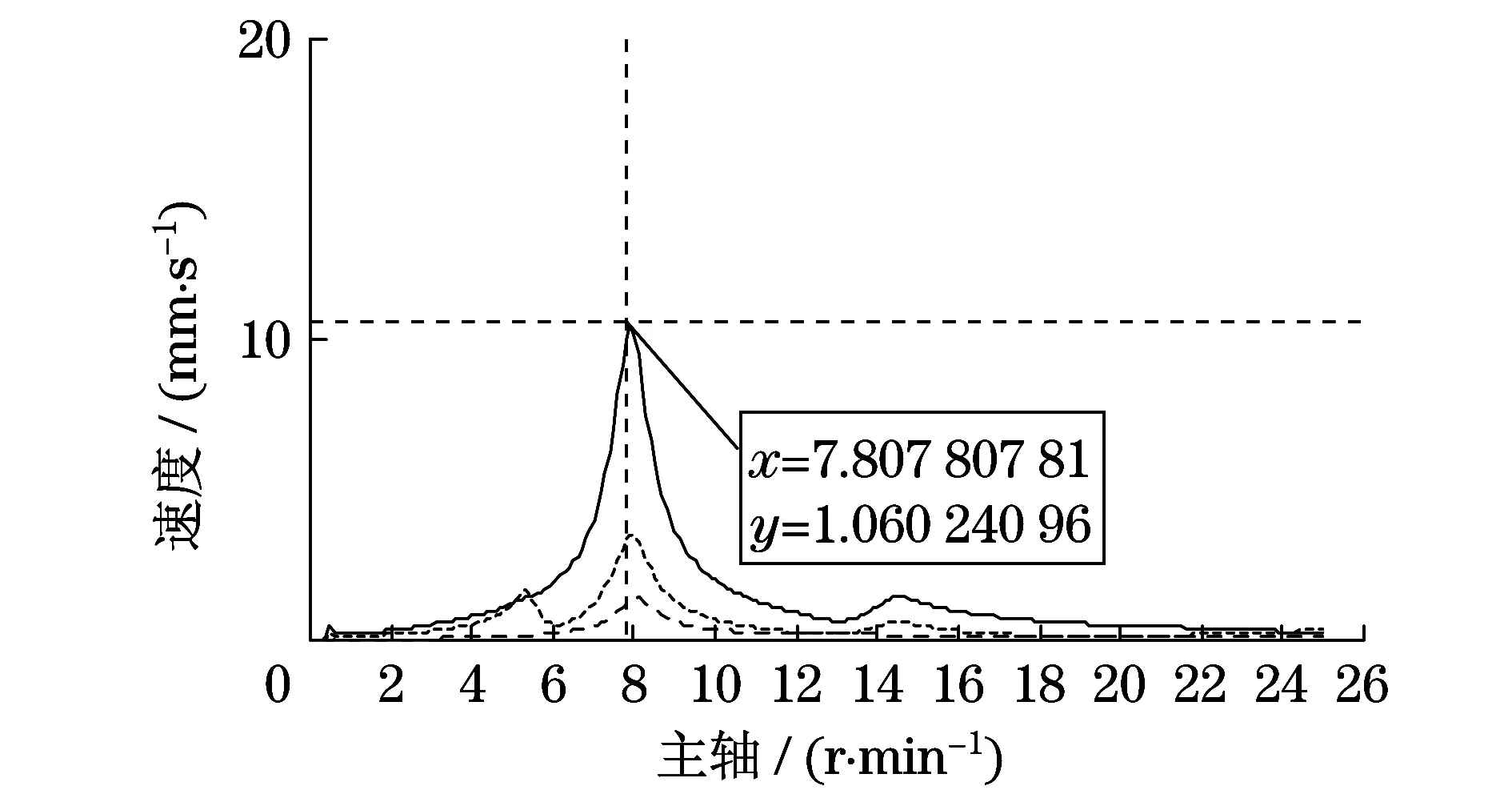
圖14 修行后箱體34 255節(jié)點處的動態(tài)響應結果Fig.14 Dynamic response result at node 34 255 ofthe box body after modification
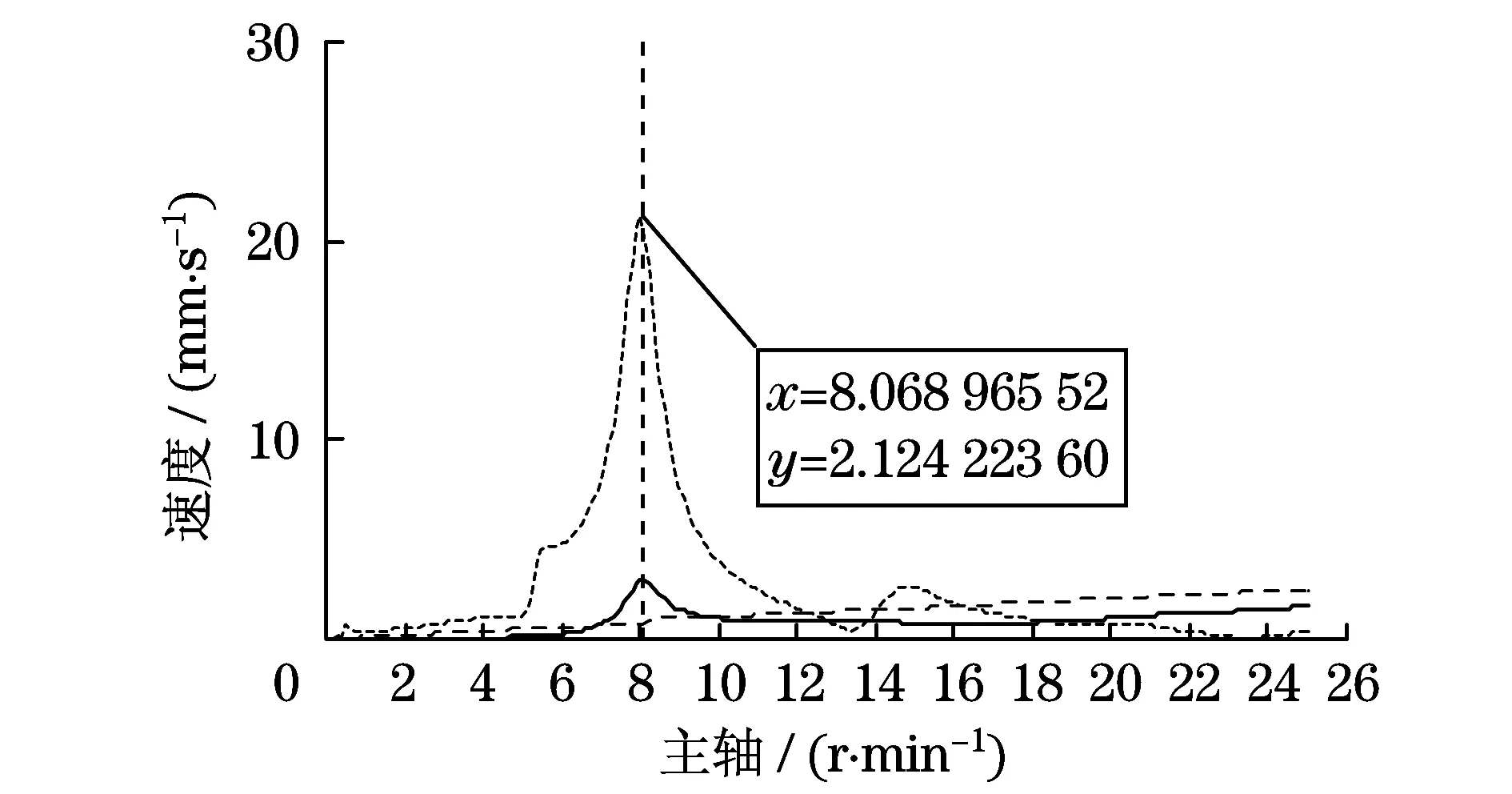
圖15 修行前扭力臂46 562節(jié)點處的動態(tài)響應結果Fig.15 Dynamic response result at node 46 562 ofthe scissor link before modification
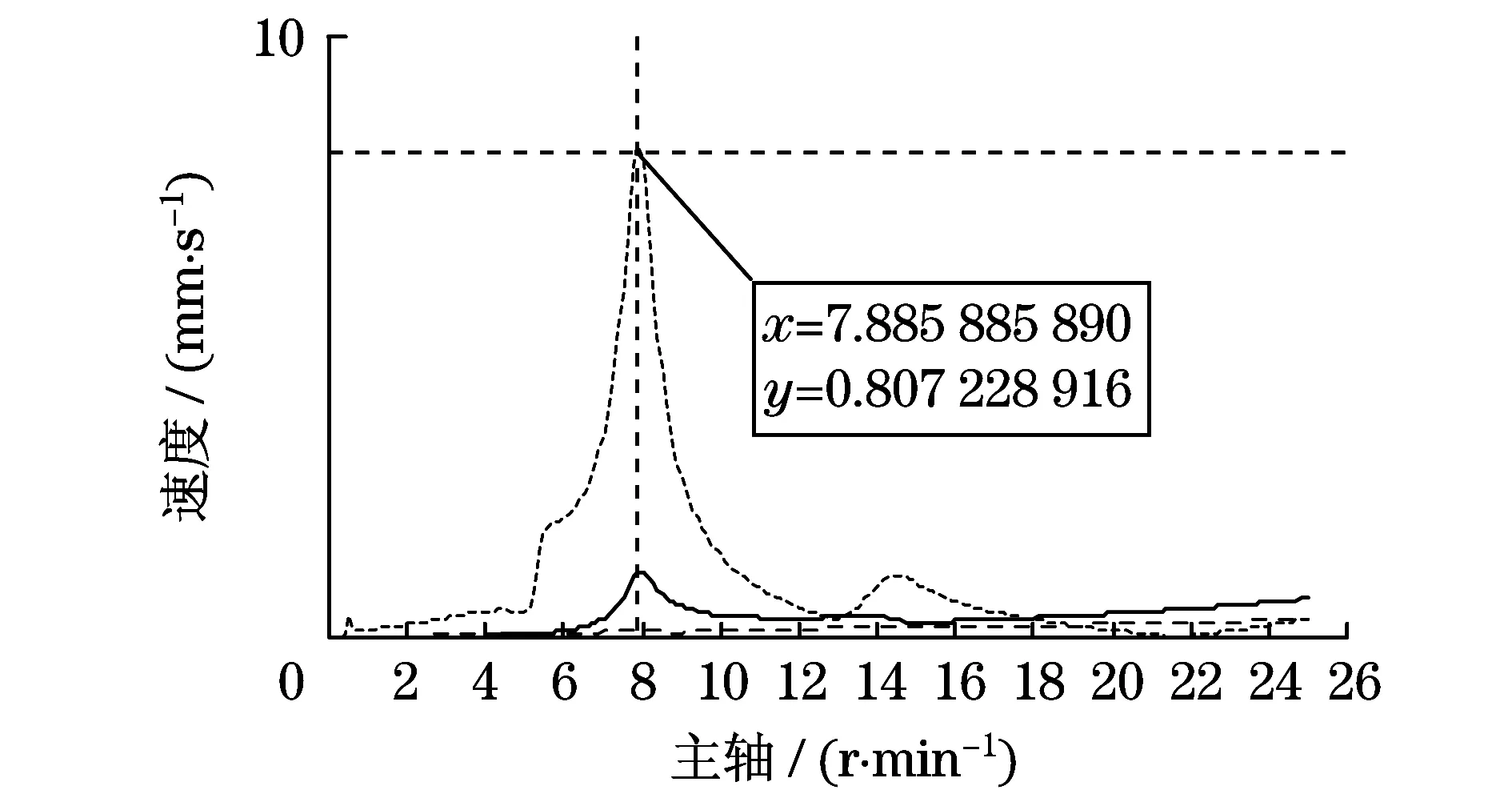
圖16 修行后扭力臂46 562節(jié)點處的動態(tài)響應結果Fig.16 Dynamic response result at node 46 562 ofthe scissor link after modification
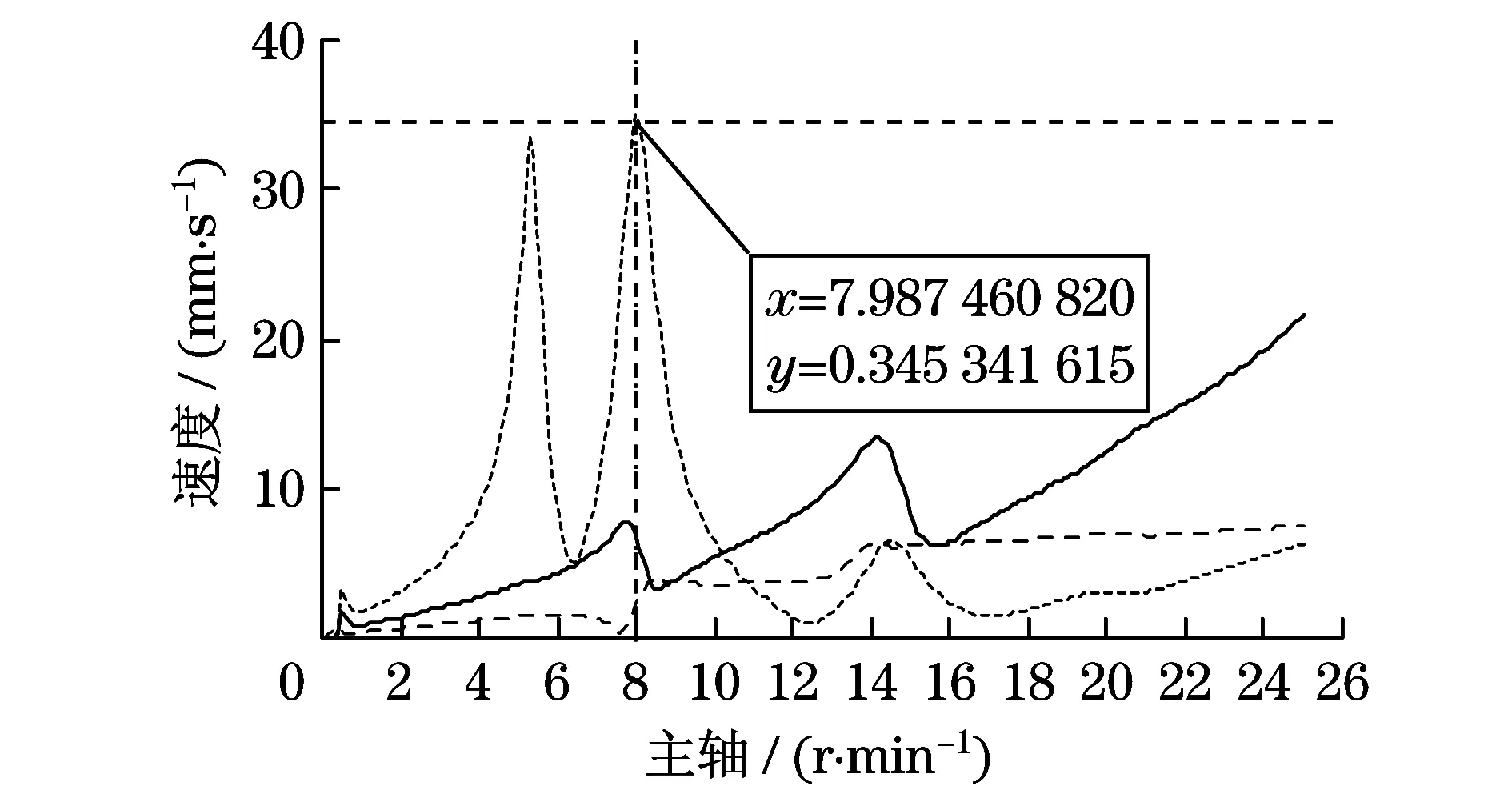
圖17 修行前扭力臂47 296節(jié)點處的動態(tài)響應結果Fig.17 Dynamic response result at node 47 296 ofthe scissor link before modification

圖18 修行后扭力臂47 296節(jié)點處的動態(tài)響應Fig.18 Dynamic response result at node 47 296 ofthe scissor link after modification
對風電齒輪箱微觀修形前、后同時在一級傳動誤差激勵下測得的箱體和扭力臂3個節(jié)點處動態(tài)響應結果進行對比分析,發(fā)現(xiàn)經(jīng)過齒輪箱的合理微觀修形,可有效緩解風電齒輪箱的振動情況.
5 結論
本文通過Romax齒輪分析軟件,對風電齒輪箱進行詳細建模.結合齒輪的微觀修形理論,采用齒向和齒廓的全部修形方案,對風電齒輪箱進行微觀修形.對修形前、后的齒輪箱性能分析發(fā)現(xiàn),本文的修形方案有效地降低了傳動誤差,提高了齒輪的承載能力,改善了齒輪的NVH性能,為風電齒輪箱的工程應用提供了強有力的參考依據(jù).