噴涂機器人運動學和軌跡規劃算法研究
2019-04-01 15:06:00劉涵茜
科技創新導報 2019年28期
關鍵詞:研究分析
劉涵茜
摘? ?要:隨著時間的推移和時代的不斷改革創新,我國的社會經濟得到了空前的發展,在良好的發展前提之下,國內開始誕生出非常多的新興行業,而機器人行業就是所謂的新興行業當中的一種。經過實際的調查其實不難發現,噴涂機器人的機構特點以及相關的做工要求都是非常考究的,因此在機器人行業現階段的發展當中,對其進行一定的研究已經是迫在眉睫的一項社會性的工作了,相關的單位以及工作部門理應開始重視起來。在此,就將針對噴涂機器人運動學和軌跡規劃算法進行一定的闡述和研究,其主要的工作目的就是使得噴涂機器人的發展能夠更加的穩定且順利。
關鍵詞:噴涂機器人? 運動學? 運動軌跡? 規劃算法? 研究分析
中圖分類號:TP242? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻標識碼:A? ? ? ? ? ? ? ? ? ? ? ? 文章編號:1674-098X(2019)10(a)-0077-04
Abstract: With the passage of time and the continuous reform and innovation of the times, China's social and economic development has been unprecedented. On the premise of good development, many new industries have emerged in China, and the robot industry is one of the so-called emerging industries. After the actual investigation, it is not difficult to find that the spraying robot's mechanism characteristics and related workmanship requirements are very exquisite. Therefore, in the development of the robot industry at this stage, it is an urgent social work to do some research on it. The relevant units and working departments should be open to it. We began to attach importance to it. In this paper, the kinematics and trajectory planning algorithm of spraying robot will be elaborated and studied. Its main purpose is to make the development of spraying robot more stable and smoother.
Key Words: Spraying robot; Kinematics; Trajectory; Planning algorithm; Research and analysis
眾所周知,對于一個國家的發展來說,其內部工業的發展程度是十分重要的,甚至在某種程度上來說,一個國家內部的工業發展程度能夠代表其發展的最高水平,從這一點中就能夠看出,一個國家工業發展的重要性了,而現階段工業發展當中,工業機器人已經在各項社會工作當中進行應用,并且還取得了相當不錯的成效,噴涂機器人就是工業機器人其中的一種,在實際的生產活動當中,噴涂機器人經常用于汽車等產品的涂裝生產。所以,在接下來的文章當中,就將針對噴涂機器人運動學和軌跡規劃算法進行一定的研究,并且在文章當中,還會提出一些具有建設性的意見或者對策,以使得噴涂機器人的發展能夠始終處于世界的先進水平,且有利于社會經濟的發展。
1? 整體機構的分析
為了清晰的了解噴涂機器人的工作,就需要對其實際的工作過程進行必要的了解和分析,這樣才能利于后續的研究工作。在實際的調查以及相關的文獻記載中可以發現,噴涂機器人的工作系統并不是唯一的,在整體的角度上進行分析的話,噴涂機器人的工作系統主要具有兩種,其中一種是比較簡單的,而相對應的,另一種工作系統就是相對比較復雜的了[1]。
(1)簡易集成噴涂系統。
在實際的噴涂機器人當中,這種簡易集成的噴涂工作系統還是比較常見的,該系統的位置處于機器人整體的第六軸的法蘭末端,之所以將其稱為簡易的噴涂系統,主要的原因就是在實際的噴涂工作當中,噴涂機器人的總控平臺只需要通過IO信號便可以實現工作動作的控制,這樣在實際的工作過程當中,工作的流程相對比較簡便,而且,這種簡便的工作過程,還會將諸多的不良影響因素排除在外,以此,就能夠保證實際的噴漆工作的質量比較完好,而且無論是在工作質量方面,還是在工作效率方面,簡易集成噴涂系統的優勢還是比較大的[2]。
(2)復雜集成的噴涂系統。
在前文已經進行了一定的提及,復雜的集成噴涂系統與簡易集成噴涂系統之間是互成對應的關系,因此,二者進行相關的比較其實就能夠輕易的發現,復雜集成噴涂系統當中,其具有的功能模塊是非常多的,而且這種噴涂機器人的復雜集成噴涂系統的造價是比較昂貴的,而且,由于其功能模塊比較多,在控制手段的選擇當中,就不能夠由單一的總控平臺進行控制了。另外,這一系統在噴涂的工作當中,能夠實現更加精細的控制,而這一點簡易集成的噴涂系統是不能完成的,例如在實際的噴涂生產活動當中,具有復雜集成的噴涂系統能夠對噴涂參數的精準控制,這樣噴涂的形狀、厚度,都能夠變得非常精準[3]。因此,這一系統對于噴涂機器人來說是非常之重要的。
針對相關的文獻資料進行調查之后,就能夠發現,傳統的工業機器人的設計其實大多數都是垂直型的機構設計,但是隨著時間的推移和社會經濟的不斷發展,傳統設計的工業機器人逐漸不能滿足社會發展的需求了,最重要的一點其實就是傳統的工業機器人在進行解構分析的過程中,經常會遇到多關節正余弦值相乘的情況,而眾所周知的,這些多關節的正余弦值都是無理數且比較難以得出準確的數值,進而使得解析的解值不易得出,分析工作變得異常困難[4]。
針對傳統的工業機器人的設計,則將上述的缺點之處進行了避免,首先,工業噴涂機器人第二軸和第三軸的電機,在設計當中都將其放在了大臂的下方,這樣的布置形勢就避免了上述的解析解值難以求出的情況,另外,在多個回轉軸的相鄰軸線夾角角度的設計當中,都將其設置未60°,這樣無論是正弦值還是余弦值,都能夠得到一個相對比較準確的數字,這一點對于分析工作的進行是非常重要的,另外,這種布置形式還能夠使得噴漆大臂的活動變得更加的靈活,這樣就能夠適應各種不同程度的工作任務了,且這種布置形式的操作空間的范圍很大,對于這項工作的未來發展和創新改變時比較有利的。
但是這一設計形式并不全部都是優點,在整體上也具有一定的缺陷之處,例如實際操作變得更加困難等等,并且這些缺陷之處在第三關節當中體現的更加的明顯,從噴涂機器人的機構構造圖當中就能夠看出,其第三關節機械傳動結構是非常復雜的,其腕部位置的結構也比較復雜,這種情況就會使得加工過程的難度加大,無論是單個噴涂機器人構造的加工還是一個批次的加工過程都會變得更加的困難,而且,在之后的社會發展當中,勢必會對噴涂機器人的工作提出更高的要求,也就是說之后的設計工作的難度也是比較大的[5]。
2? 運動學建模
(1)運動學正解。
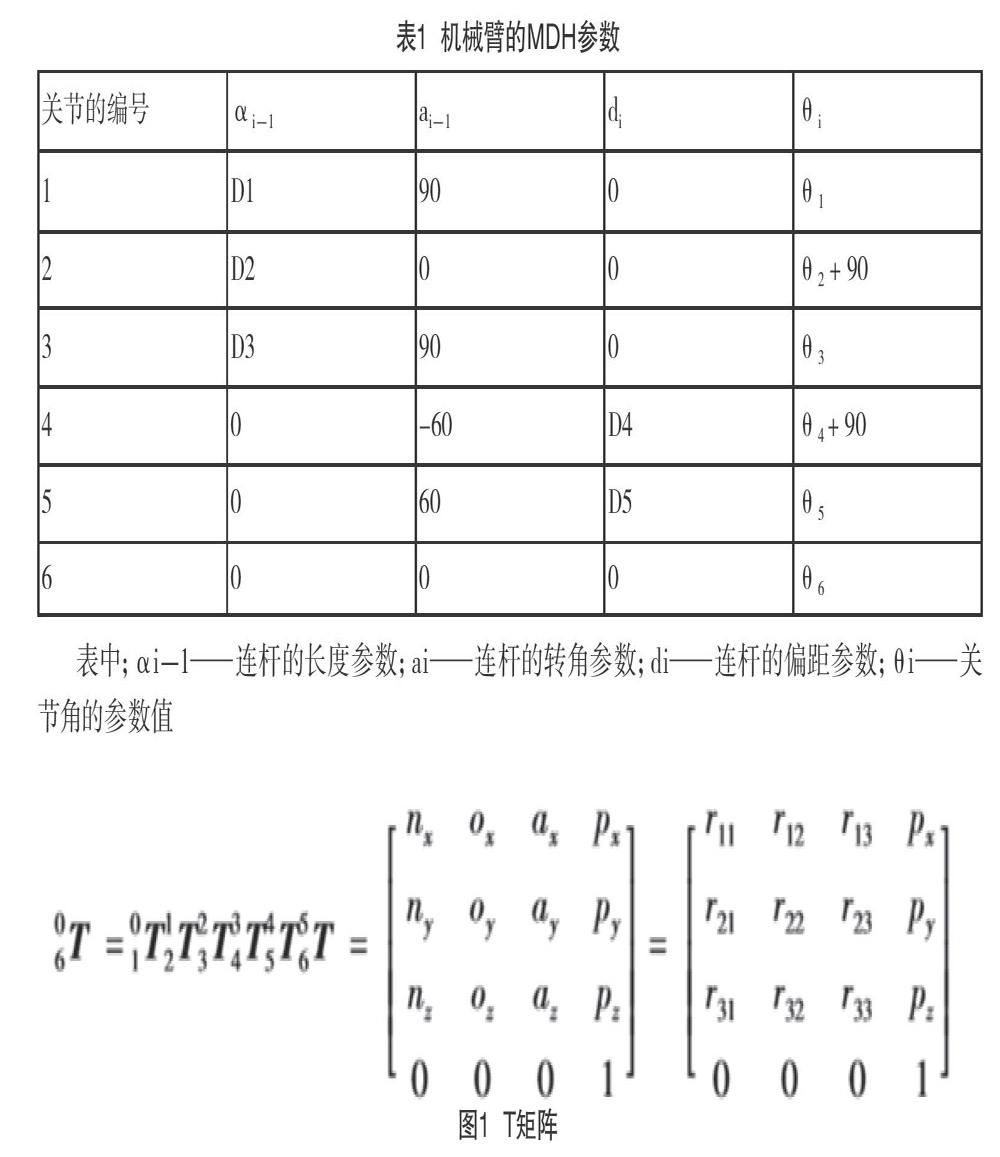
本文所研究的是噴涂機器人運動學和軌跡規劃算法,也就是進行研究和分析的就是噴涂機器人的本體,在這一前提確定之后,進行運動學的正解過程就需要了解噴涂機器人的各種MDH參數,這樣才能完成計算和分析過程。
在實際的分析計算過程當中,還需要用到T矩陣,這里所謂的T矩陣,其實就是一個描述連桿坐標系之間的位置變化情況。
(2)擬牛頓迭代。
一般情況下來說,對于非線性的方程進行求解的話,需要保證的一點就是方程的數量要與未知數的數量相等,而為了方便進行擬牛頓迭代的計算,還需要進行一定的假設,這樣就能夠得到擬牛頓迭代的基本格式了,另外,在后續的工作過程當中就能夠得到我們需要的雅克比矩陣,這一矩陣得出之后就能夠進行運動學的正解過程了,因此在某種程度上來說,這一工作過程也可以說成是分析過程的一種必要的前提保證,相關的工作人員以及部門要知曉其重要性。
(3)逆運動學。
經過實際的計算和了解之后,其實不難發現,對于噴涂機器人來說,可以通過向量以及前四軸的關節值來進行計算過程,并且根據這幾項數據,還可以建立起三個方程,但是如果想要建立一個需要的雅克比矩陣的話,還缺少一個方程,所以,在后續的分析和計算過程當中,就需要根據實際的分析情況來再建立一個新的方程。為了達到這一目的,可以進行必要的假設過程,所以在實際的分析過程中,可以假設我們已經求得了前四個軸的關節值,并且這些解值還都是具有可行性的,在之后的計算過程當中,還需要建立其一種新的等量關系,這樣便能夠得到另外的一個方程了,這樣就具有了四個不同的方程,便能夠建立起一個需要的雅克比矩陣了。
3? 噴涂機器人軌跡規劃
所謂噴涂機器人的軌跡規劃,其實就是一種運動軌跡的跟蹤和控制工作,在這一工作內容當中,可以使得噴涂機器人能夠在末端以比較明確的形態來根據規劃好的路徑來進行運動,一旦可以實現這一點,噴涂機器人在實際的工作過程當中能夠出現的失誤量是比較少的,這對于噴涂機器人當前的工作狀態以及未來的工作進展都是具有比較重大的意義的,因此,相關的工作單位以及人員對于噴涂機器人的軌跡規劃工作要逐漸的重視起來。
在噴涂機器人的噴涂工作當中,關節空間位置的插補就是指,在起始點與目標位置這一段距離當中具有多個離散的位置點,而這些位置的相關數據,是能夠通過一定的方式方法來計算出來的[8]。
并且,噴涂機器人在實際的噴涂工作當中,噴槍在汽車表面所經過了一系列軌跡當中,要確保噴前掃過的部分要互相重疊,而在互相重疊的部分也是具有不同的要求的,首要的一點要求就是保證存在適當的間距部分,而噴涂機器人的軌跡規劃工作就能夠完成這一點。但是在前期的工作過程中不難發現,雖然噴涂機器人的工作能夠完成這一點,但是其運動狀態比較勉強,這樣就會使得噴涂間距效果不是非常好,所以,改善當前的運動狀態是非常重要的一項工作內容,而為了實現這一點,在實際的運行軌跡規劃工作當中,可以采用正弦曲線作為運行軌跡曲線,在完成這一操作之后,就能夠發現非常明顯的一點,無論是運動過程的連續性還是平順性,都有非常巨大的提升。造成這種情況主要的原因就是正弦曲線的選擇,正弦曲線在定義域之內擁有連續且高階可導的特性,而在選擇的過程結束之后,這一特性在實際的工作過程當中就能夠發揮到極致,這一點對于噴涂機器人的軌跡規劃工作是非常重要的。
除以上幾點之下,運動軌跡當中的其他運動狀態也是可以進行相關的控制工作了,例如,在實際的工作當中可以改變振幅,這樣就能夠實現噴灑高度之上的控制,如果改變的是正弦曲線的頻率,就可以對重疊部分的寬度實現控制,這一控制作用是能夠節省材料的,這兩種控制作用同時進行,還具有能夠調節行進速度的作用。
4? 噴涂機器人算法研究的仿真過程
在各種系統算法的研究過程當中,仿真驗證過程是非常重要的一項工作內容,這一工作內容進行得當,才能夠使得之前的一些計算過程成立,相反的,如果在仿真驗證的工作過程當中,發現了一定錯誤情況的話,就要進行必要的修改過程,將正確無誤的數值帶入到計算過程當中,在全部計算過程結束之后,還需要再次進行仿真驗證,以確定之前的計算過程是準確且無誤的。通過相關的規劃其就能夠生產正確的正弦運行軌跡,相關的工作人員在實際的仿真驗證過程當中,可以先進行逆解的計算過程,再進行正解的計算過程,這樣多次的計算過程,就相當于完成了仿真驗證過程了,運用學算法是否有效,也就能夠得到確定了。另外,在這一工作過程當中,其插值點的選擇是非常重要的,因為,一個關鍵的插值點,會對軌跡規劃整體的平順性和連續性造成巨大的影響,如果能夠選擇合適的插值點,就能夠使得噴涂機器人的工作過程變得穩定且順利。
5? 噴涂機器人運動學和軌跡規劃算法研究的意義
隨著時間的推移和時代的不斷改革創新,我國的社會經濟已經實現了空前的發展,而且就現階段來說,汽車對于廣大的人民群眾已經不再是一個十分陌生的詞匯了,并且隨著社會經濟的不斷發展,在未來勢必會對汽車的質量具有更高的要求,為此,噴涂機器人運動學和軌跡規劃算法的研究是非常必要的,因為在某種程度上,這項工作能夠提升當前以及未來汽車的質量。這樣,在未來的社會發展當中,國內廣大的人民群眾的基本需求就能夠得到保證,這對于未來社會的發展以及社會經濟的發展,都是具有非常大的積極意義的。為此,在后續的發展過程當中,相關的工作單位一定要重視噴涂機器人運動學和軌跡規劃算法研究。
6? 結語
綜上所述,就是目前為止的噴涂機器人運動學和軌跡規劃算法的相關研究和分析了,從文中敘述的內容當中不難看出,我國在這項工作當中還是存在著比較大的欠缺的,例如實際噴涂機器人的工作還是不夠穩定,甚至在一些意外的情況之下還會出現不同程度的失誤情況,面對著這種情況,相關的工作部門以及工作人員就要做好相關的優化和完善工作,這樣才能使得噴涂機器人運動學和軌跡規劃算法研究具有其自身的意義。
參考文獻
[1] 王征兵,孫文磊.IRB4400噴涂機器人運動學分析研究[J].組合機床與自動化加工技術,2018(12):34-37,42.
[2] 李芳,顧海巍.噴涂機器人運動學與軌跡規劃算法研究[J].組合機床與自動化加工技術,2017(12):25-28,32.
[3] 王美妍,李杰.六自由度工業機器人軌跡規劃算法研究[J].精密制造與自動化,2017(4):47-50.
[4] 黃均標.六關節噴涂機器人的控制系統設計與開發[D].廣東工業大學,2017
[5] 徐龍.面向噴涂作業的多機器人在線智能編程系統研究[D].東南大學,2017.
[6] 陳濟澤.噴涂機器人軌跡規劃系統的研究[D].哈爾濱工業大學,2016.
[7] 馬超坤.懸鏈涂裝線上車輪搬運機器人的軌跡規劃[D].濟南大學,2016.
[8] 畢道鹍.涂裝機器人噴幅誤差控制技術研究[D].中國科學技術大學,2015.
[9] 李承宇.6DOF機器人銑削NURBS曲面刀具軌跡規劃及姿態控制研究[D].蘭州交通大學,2018.
[10]高巖.工業機器人軌跡規劃算法的研究與實現[D].沈陽計算機研究所,2014.
猜你喜歡
農業與技術(2016年19期)2016-12-12 02:22:00
現代營銷·學苑版(2016年9期)2016-12-08 01:33:13
新教育時代·教師版(2016年29期)2016-12-05 07:58:32
都市家教·下半月(2016年10期)2016-11-30 23:35:34
中外醫學研究(2016年26期)2016-11-30 04:29:00
讀與寫·上旬刊(2016年10期)2016-11-25 15:55:49
科學與財富(2016年15期)2016-11-24 14:50:24
商情(2016年39期)2016-11-21 10:06:08
數字技術與應用(2016年9期)2016-11-09 00:10:15
中國科技博覽(2016年18期)2016-10-19 08:20:00
