二元機(jī)翼的非線性氣動彈性主動控制
2019-03-28 06:50:34張忠源段靜波史鳳鳴
兵器裝備工程學(xué)報 2019年2期
張忠源,段靜波,史鳳鳴, 路 平
(1.陸軍工程大學(xué)石家莊校區(qū) 無人機(jī)工程系, 石家莊 050003; 2.石家莊鐵道大學(xué) 工程力學(xué)系, 石家莊 050003)
氣動彈性主動控制是近幾十年發(fā)展起來的試圖解決飛行器結(jié)構(gòu)不穩(wěn)定和疲勞問題的關(guān)鍵技術(shù)[1]。機(jī)翼的氣動彈性特性尤其是機(jī)翼的顫振為最嚴(yán)重的動不穩(wěn)定現(xiàn)象,會使機(jī)翼從氣流中吸收能量導(dǎo)致結(jié)構(gòu)振動,甚至導(dǎo)致結(jié)構(gòu)嚴(yán)重破壞。學(xué)者一直在探索延緩和控制顫振的各種途徑,現(xiàn)有途徑大致分為兩類:被動控制和主動控制,被動控制是已廣泛應(yīng)用的技術(shù),主動控制是為了彌補(bǔ)被動控制的不足,是一種新技術(shù)。目前,研究最多的是氣動彈性主動控制。
20世紀(jì)90年代鄒叢青等[2]開始了飛行器顫振主動控制問題方面控制律的研究,把最優(yōu)控制理論和顫振分析的狀態(tài)空間法相結(jié)合,解決了陣風(fēng)緩解和穩(wěn)定裕度等問題。宗捷等[3]針對某一特殊無人機(jī)機(jī)型開始了陣風(fēng)問題和顫振主動控制的研究,應(yīng)用現(xiàn)代控制理論對飛行器系統(tǒng)分別作開環(huán)和閉環(huán)分析,設(shè)計的控制律具有減緩陣風(fēng)響應(yīng)和抑制顫振的雙重效果。M Tadi[4]研究了用于氣動彈性系統(tǒng)中顫振抑制的反饋控制設(shè)計,推導(dǎo)了基于狀態(tài)相關(guān)Riccati方程的反饋控制律。M Karpel[5]使用狀態(tài)空間氣動模型設(shè)計一個恒定增益的反饋控制系統(tǒng),該系統(tǒng)可同時保證穩(wěn)定性和完成對整個飛行包線內(nèi)陣風(fēng)響應(yīng)參數(shù)的優(yōu)化。多輸入/多輸出系統(tǒng)的氣動彈性主動控制問題成為氣動彈性分析的重要研究方面,吳志剛[6-7]團(tuán)隊以無人機(jī)二元機(jī)翼和帶兩個控制面板的三角機(jī)翼為研究對象,將滑模控制理論和LQC理論用于解決氣動彈性主動控制。隨著現(xiàn)代控制科學(xué)的發(fā)展,王囡囡等[8]提出了基于動柔度法的顫振主動控制研究,該方法無需提前知道機(jī)翼的剛度、阻尼等參數(shù),可根據(jù)極點控制理論確定系統(tǒng)反饋控制增益。而真實的氣動彈性控制系統(tǒng)是非線性的[9],非線性系統(tǒng)更加復(fù)雜,求解難度更大,SH Moon等[10]基于非線性氣動模型進(jìn)行了最優(yōu)控制設(shè)計的探索。A Behal等[11]研究了在不可壓縮流場中的非線性二維機(jī)翼系統(tǒng)的自適應(yīng)控制。丁千等[12]針對具有非線性俯仰剛度的二元機(jī)翼研究了顫振主動控制。考慮機(jī)翼俯仰方向阻尼和剛度存在非線性情況,許行之等[13]采用多項式非線性模型建立機(jī)翼控制模型,利用李雅普諾夫穩(wěn)定性理論實現(xiàn)機(jī)翼的氣動彈性自適應(yīng)控制。
本文對機(jī)翼非線性主動控制進(jìn)行了拓展研究。以二元三自由度機(jī)翼為研究對象,建立了機(jī)翼的非線性氣動模型,得到時變控制系統(tǒng)。針對時變系統(tǒng)控制律設(shè)計困難問題,結(jié)合系統(tǒng)時變規(guī)律,設(shè)計了對應(yīng)的狀態(tài)反饋控制律,為解決非線性氣動彈性控制問題提供了新思路。
1 三自由度二元機(jī)翼非線性氣動模型
如圖1所示,在機(jī)翼后緣有一控制面。系統(tǒng)的三自由度分別為剛心E的撓度h(向下為正)、機(jī)翼繞剛心的扭轉(zhuǎn)角為α(迎風(fēng)抬頭為正)以及控制面偏轉(zhuǎn)角β(向下偏轉(zhuǎn)為正)。機(jī)翼的運動方程為:
(1)
式中:m為單位長度機(jī)翼的質(zhì)量;Sα為單位展長機(jī)翼對彈性軸的質(zhì)量靜矩;Iα是單位展長機(jī)翼對彈性軸的質(zhì)量慣性矩;Kh、Kα分別為機(jī)翼沉浮和俯仰剛度。機(jī)翼所受的升力L和力矩M可以表示為:
(2)
這里升力L和力矩M都由兩個部分組成,Ll和Ml表示線性部分,表達(dá)式為:
(3)


圖1 三自由度二元機(jī)翼
Ln和Mn表示非線性部分,這里采用文獻(xiàn)[14]中介紹的ONERA動態(tài)失速模型,表達(dá)式為:
(4)
需要說明的是,非線性氣動系數(shù)下標(biāo)z=L表示與升力有關(guān)系數(shù);下標(biāo)z=M表示與力矩有關(guān)的系數(shù)。非線性氣動系數(shù)Cz表達(dá)式如下:
(5)
非線性氣動力部分的有關(guān)參數(shù)有r1z,r2z,r3z為:
為簡化計算,通常用折線代替靜態(tài)空氣動力曲線,如圖2。

圖2 靜態(tài)空氣動力曲線

(7)
為通過式(5)求解出非線性氣動系數(shù)Cz,本文采用Laplace變換得方法,將式(5)進(jìn)行Laplace變換并整理得:
(8)
通過Laplace逆變換可以得出:
(9)
分別令z=L和z=M代入式(4)并聯(lián)立式(1)、式(2)、式(3)即可得到機(jī)翼的三自由度二元機(jī)翼非線性氣動模型。
2 狀態(tài)空間模型與控制律設(shè)計
把上一節(jié)得到的機(jī)翼非線性氣動模型改寫成狀態(tài)空間形式:
(10)


圖3 參數(shù)k2時間響應(yīng)波形
針對系統(tǒng)的特征,將本文控制系統(tǒng)設(shè)計成狀態(tài)反饋系統(tǒng),K為反饋矩陣,系統(tǒng)矩陣變?yōu)?A-BK),如圖3所示,橫坐標(biāo)t=t+時,時變參數(shù)幅值為最大值,此狀態(tài)對應(yīng)的系統(tǒng)相關(guān)矩陣表示為A+、B和K+,橫坐標(biāo)t=t-時,時變參數(shù)幅值為最小值,此狀態(tài)對應(yīng)的系統(tǒng)相關(guān)矩陣表示為A-、B和K-,這兩種狀態(tài)結(jié)合李雅普諾夫判據(jù)可以得出:
(11)
定義折合系數(shù)ε,且ε∈(0,1),將式(11)中兩個不等式兩邊分別乘以系數(shù)ε和(1-ε)并相加,得到:

P([(1-ε)A-+εA+]-B[(1-ε)K-+εK+])<0
(12)
式(12)表示含有折合系數(shù)ε的新系統(tǒng),且符合李雅普諾夫穩(wěn)定性判據(jù),此系統(tǒng)對應(yīng)的相關(guān)矩陣可以表示為:
A(ε)=(1-ε)A-+εA+
(13)
K(ε)=(1-ε)K-+εK+
(14)
由于A+、A-、K-和K+為系統(tǒng)時變參數(shù)取最值對應(yīng)的解,所以A(ε)、K(ε)可以表示出在整個時域范圍內(nèi)的系統(tǒng)所有滿足李雅普諾夫穩(wěn)定性判據(jù)的系統(tǒng)矩陣。任意時刻t0的狀態(tài)反饋矩陣K(t0)求解過程如圖4所示。

圖4 反饋控制求解流程
圖4說明了本文求解某一時刻反饋矩陣K(t0)具體步驟,由于直接運用解析法求解時變系統(tǒng)的反饋控制矩陣很難實現(xiàn),本文采取建立時刻t0與折合系數(shù)ε的一一映射關(guān)系的方法來實現(xiàn)對K(t0)的求解。需要說明的是在運用式(11)求解K-和K+時,要借助線性矩陣不等式(LMI)工具箱,一個線性矩陣不等式問題一旦確定,就可以通過調(diào)用適當(dāng)?shù)木€性矩陣不等式求解器來對這個問題進(jìn)行數(shù)值計算。
整個機(jī)翼的狀態(tài)反饋系統(tǒng)流程如圖5所示,時變系統(tǒng)通過引入時鐘信號實現(xiàn)對時變矩陣A(t)的表示,而后計算反解出折合系數(shù)ε,進(jìn)而求出對應(yīng)時刻的反饋矩陣K(t),從而實現(xiàn)對系統(tǒng)的反饋控制。

圖5 控制系統(tǒng)流程
3 算例仿真與分析
本研究選取的三自由度二元機(jī)翼模型的具體參數(shù)如表1。

表1 機(jī)翼模型參數(shù)
已知機(jī)翼的開環(huán)顫振速度為29.3 m/s,仿真時選取的空速為33.7 m/s(高于開環(huán)顫振速度的15%),使用上一節(jié)設(shè)計的反饋控制系統(tǒng),具體參數(shù)見附錄,先仿真得到系統(tǒng)的開環(huán)時域響應(yīng),如圖6所示。

圖6 開環(huán)時域響應(yīng)
圖6分別是機(jī)翼撓度和扭轉(zhuǎn)角隨時間的變化曲線,從仿真的結(jié)果可以看出,在開環(huán)系統(tǒng)條件下,風(fēng)速為33.7 m/s時,此時風(fēng)速高于機(jī)翼顫振速度,系統(tǒng)呈現(xiàn)振蕩發(fā)散的狀態(tài)。隨后,接入反饋控制模塊,在同樣的風(fēng)速下,仿真得到系統(tǒng)的閉環(huán)時域響應(yīng),如圖7所示。
通過觀察圖7的機(jī)翼撓度和扭轉(zhuǎn)角隨時間的變化曲線,可以看出閉環(huán)控制系統(tǒng)是穩(wěn)定的,系統(tǒng)在0.8s左右可以收斂至平衡位置,從而改善了機(jī)翼系統(tǒng)的氣動彈性特性,提高了機(jī)翼安全飛行速度上限。當(dāng)機(jī)翼受陣風(fēng)干擾時,會因為外界干擾力作用而發(fā)生強(qiáng)迫運動,對機(jī)翼結(jié)構(gòu)強(qiáng)度、疲勞以及飛行品質(zhì)產(chǎn)生較大影響。這里主要討論控制系統(tǒng)對陣風(fēng)作用下機(jī)翼響應(yīng)的影響。以“1-cos”陣風(fēng)為例,因為實際工程中這類陣風(fēng)遇到的頻率最高,“1-cos”陣風(fēng)速度表達(dá)式為:
(15)
其中:W0表示陣風(fēng)峰值速度,取20 m/s;H表示離散尺度,取4 m。陣風(fēng)的具體形式如圖8所示。

圖7 閉環(huán)時域響應(yīng)

圖8 “1-cos”陣風(fēng)
分別計算開環(huán)系統(tǒng)和閉環(huán)系統(tǒng)在“1-cos”陣風(fēng)影響下的機(jī)翼撓度響應(yīng),其中空速V=25 m/s,選取的空速低于機(jī)翼的顫振速度,也就是說此時機(jī)翼系統(tǒng)本身處于穩(wěn)定狀態(tài),當(dāng)遇到突風(fēng)產(chǎn)生激勵,機(jī)翼系統(tǒng)通過自身調(diào)節(jié)可以恢復(fù)穩(wěn)定,得到的響應(yīng)結(jié)果如圖9所示。
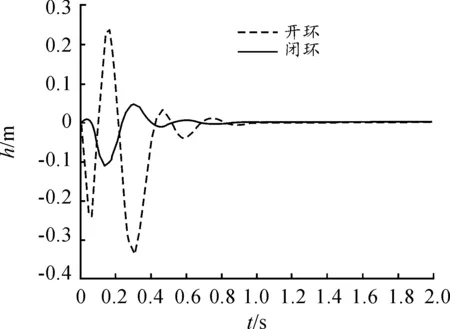
圖9 機(jī)翼陣風(fēng)響應(yīng)結(jié)果
從圖中對比開環(huán)系統(tǒng)和閉環(huán)系統(tǒng)的陣風(fēng)響應(yīng),可以看出閉環(huán)控制系統(tǒng)相對于開環(huán)控制系統(tǒng),有效降低了機(jī)翼振幅,同時縮短了機(jī)翼響應(yīng)衰減時間,大大提高了機(jī)翼系統(tǒng)的穩(wěn)定性,保證了機(jī)翼氣動彈性特性和飛行品質(zhì)。
4 結(jié)論
1) 針對時變系統(tǒng)控制律設(shè)計困難問題,結(jié)合系統(tǒng)時變規(guī)律,設(shè)計了對應(yīng)的狀態(tài)反饋控制律。
2) 通過仿真對比開環(huán)和閉環(huán)系統(tǒng)的超顫振速度條件下時域響應(yīng)、陣風(fēng)響應(yīng),表明設(shè)計的反饋控制律可以有效地改善機(jī)翼氣動特性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19