STP系統列車定位方法研究
2019-03-22 06:36:12李晗韓波
中國鐵路 2019年3期
李晗,韓波
(1.中交機電工程局有限公司 武漢技術中心,湖北 武漢 430060;2.中國鐵道科學研究院集團有限公司 通信信號研究所,北京 100081)
1 STP系統及其特點
無線調車機車信號和監控系統(STP)是保障車站調車作業安全的重要行車輔助設備,目前已廣泛應用在車站的調車作業安全監督中[1-3]。STP系統利用無線通信,能夠實時地實現機車和地面間狀態信息交換的閉環監控,包括站場進路信息、信號機狀態信息、調車機車運行狀態等與調車作業安全密切相關的信息。同時,STP車載主機配合列車運行監控裝置(LKJ)構成的車載系統能夠有效防止調車作業中冒進防護信號、沖撞土擋、行車作業超速等危險事件,既保證站內調車作業的安全,又滿足鐵路發展安全高效的要求。STP系統結構見圖1,系統具有如下特點:
(1)作為保障作業安全的行車輔助設備,系統車載設備和地面設備所采用的計算機平臺均為非安全計算機平臺,因此系統適用相對較低的安全標準。STP系統與通用機車信號設備具有相同安全級別,屬于中國列車運行控制系統CTCS-0級[4]。
(2)采用數傳電臺進行車地間無線通信,數傳電臺覆蓋范圍受地形地貌及信號干擾的限制,存在較多盲點,因此STP系統運行到盲點區域時會造成車地無線連接失敗,從而丟失機車位置信息。
(3)采用無源應答器進行注冊入網和初始坐標定位。STP系統和LKJ結合而成的車載系統在調車模式下,具備站內調車信號機的列車速度防護、機車走行距離位置跟蹤、機車運行數據記錄、應答器信息讀取等功能。
(4)系統應用范圍主要集中在車站集中區,車站站內軌道區段長度普遍較短,為避免對正線列車運行的影響,STP系統無源應答器安裝地點要避開正線列車走行區域,同時為降低工程成本,無源應答器的布點數量不應過多。
綜合上述應用特點可知,STP系統安全等級并不高,可以采用軌道電路區段占用邏輯來實現。為解決溜放作業時列車坐標丟失的問題,將STP系統的位置跟蹤實現分為2部分,其中機車部分的定位方法采用基于應答器定位點+測速傳感器的位置跟蹤,而車列部分的定位方法采用基于軌道電路+測速傳感器的位置跟蹤。
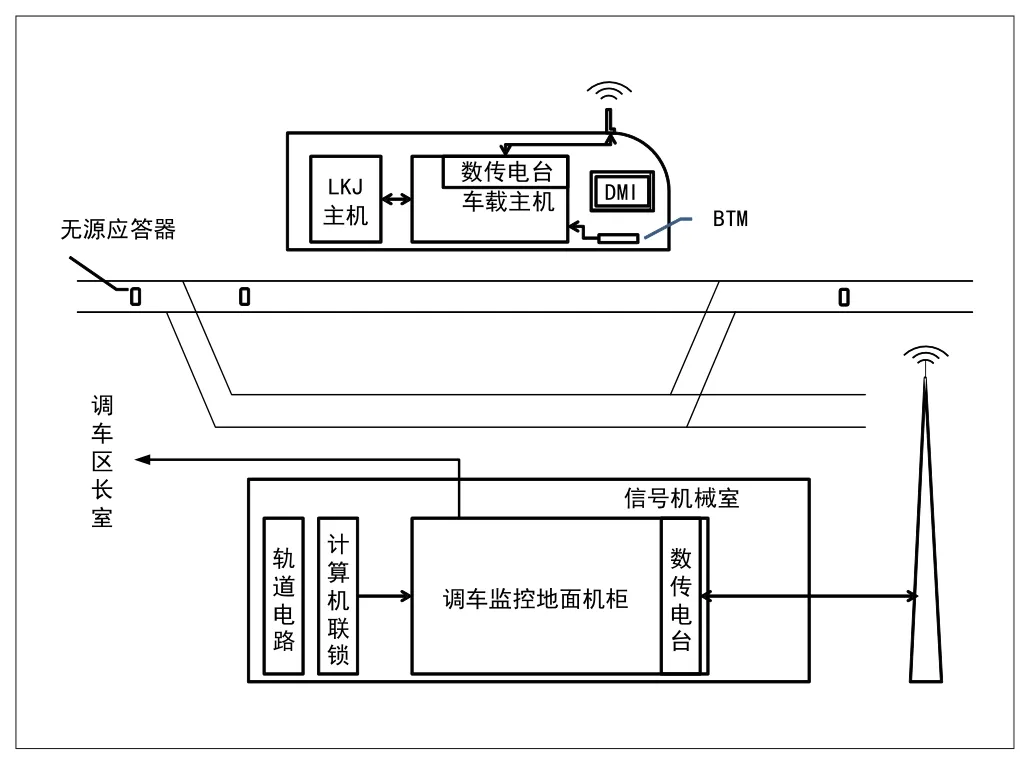
圖1 STP系統結構
2 調車作業場景分析
調車作業有特定的作業場景,通過對調車作業過程進行分析,將其劃分為9個應用場景,并描述STP系統在各場景下應具備的功能。正常狀況下6個應用場景:入網注冊、退網注銷、存車線連掛作業、牽引作業、推進作業、溜放作業;特殊情況下2個應用場景:機車停車后人工解鎖、機車行進中人工解鎖;異常情況下1個應用場景:STP設備丟失防護距離后,通過LKJ發出報警,司乘人員確認后退出STP系統。常見調車作業場景的特點如下:
(1)牽引模式。該作業模式下,機車位于前進車列的最前方,調車機車頭與前方信號機的距離和整體車列與前方信號機的距離一致。
(2)推進模式。該作業模式下,機車位于前進車列的最后方,調車機車頭與前方信號機的距離和整體車列與前方信號機的距離相差整個車列的車長。
(3)存車線編組作業和解編作業,以及咽喉區往存車線進行溜放作業是調車機在推進模式下的幾種特殊作業場景,車列長度在作業前后均會變化,進而丟失車列距前方信號機的距離。
3 STP系統定位方法
定位功能是STP系統實現的難點,在此重點對機車的單機定位和連掛后整體車列的定位進行討論。
3.1 機車定位功能
機車單機在站場圖坐標系中的位置坐標需要從向STP系統申請入網注冊開始持續到注銷退網,并保持坐標的連續性,以避免突變。考慮到現場調車作業多為折返路徑(見圖2),在應答器1處入網,按照路徑1走行至股道并沿著路徑2折返時,繼續以應答器1作為路徑2的坐標原點已不合適,因此機車走行過程中,伴隨著每次機車手柄換向都需要對坐標原點進行更替。
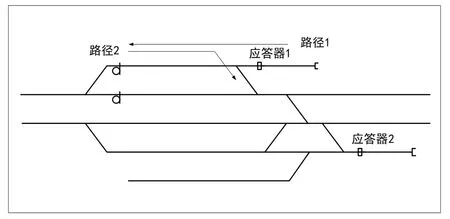
圖2 調車作業路徑示意圖
股道出站信號機與實際應答器點一起構成坐標原點集合,供坐標原點切換時使用。現場距離測量時應盡量保證股道信號機與應答器之間測量距離的準確。給定有限的2個狀態1、2以及3個觸發事件a、b、c,構建機車坐標原點定位狀態變換模型(見圖3)。圖3中,狀態1為坐標原點未知狀態,狀態2為坐標原點已知狀態;事件a為過應答器入網,事件b為過應答器退網,事件c為過應答器刷新坐標原點或機車手柄換向刷新原點。
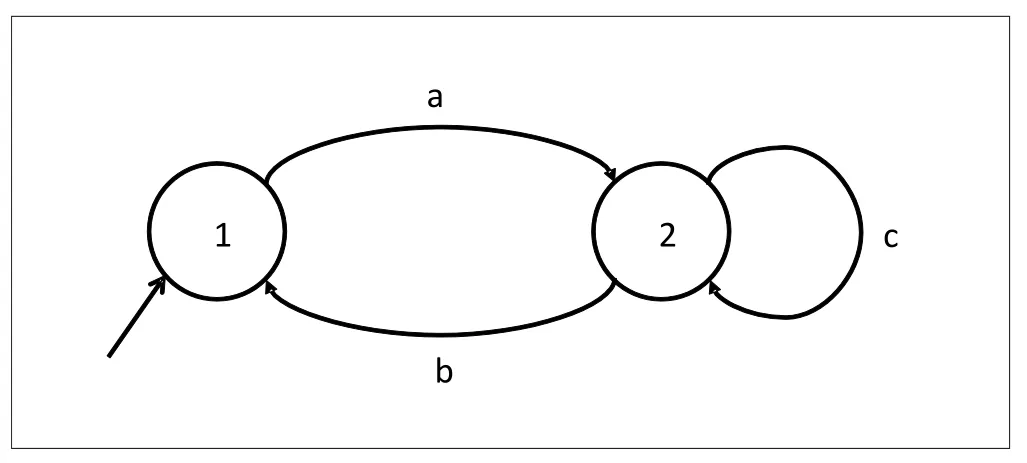
圖3 機車坐標原點定位狀態變換模型
3.2 車列定位功能
STP系統車列定位在推進作業時需要考慮連掛車輛的長度。連掛車輛的車列位置坐標在車列長度發生變化時會暫時處于未知狀態,連掛結束后車列總長度可以通過乘務員手動輸入或利用軌道電路的占用或出清時刻的坐標差進行自動計算。在此只討論按后一種方式進行車長的自動計算。
給定有限的5個狀態1、2、3、4、5以及4個觸發事件a、b、c、d,構建基于軌道電路的車列坐標定位及車長計算的狀態變換模型(見圖4)。圖4中,狀態1表示機車坐標已知但車列坐標未知,狀態2表示車列頭部坐標已知但車列尾部坐標未知,狀態3表示車列尾部坐標已知且車列頭部坐標已知,狀態4表示車列尾部坐標已知但車列頭部坐標未知,狀態5表示車列距前方信號機距離已知;事件a表示當前進路前方區段占紅,事件b表示當前進路已占紅區段后方出清,事件c表示車列丟失尾部定位坐標,事件d表示車列丟失頭部定位坐標。
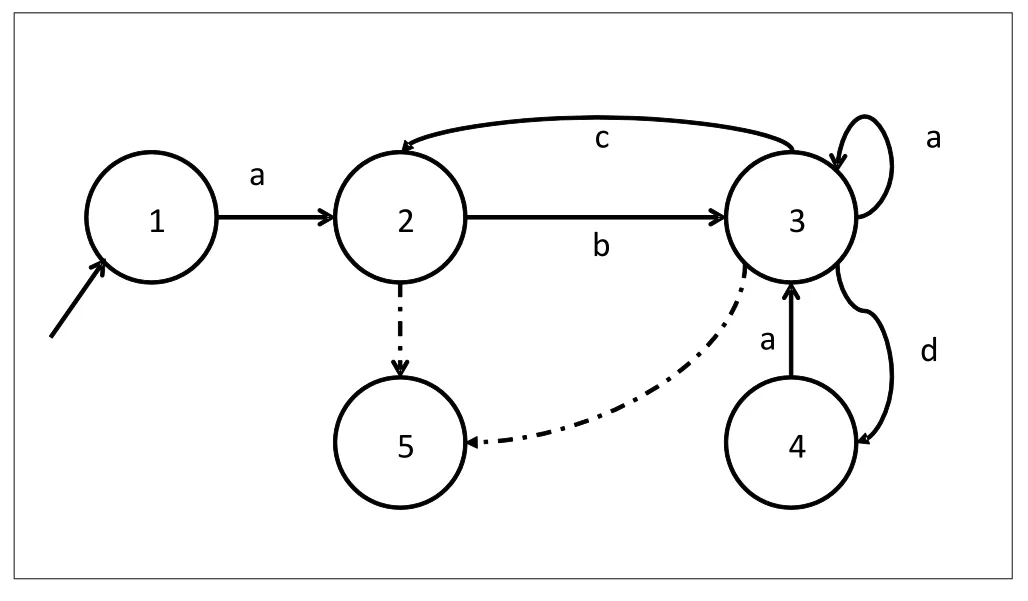
圖4 車列坐標定位及車長計算的狀態變換模型
3.3 定位誤差分析
基于軌道電路狀態變化實現的定位算法容易存在定位誤差,誤差隨著時間的累積可能會超過站場內部分段區段的長度,甚至可能會出現機車實際位置與軌道電路實際占用區段不一致的情況,因此需要對定位誤差進行更新。考慮工程經濟性,在有限的應答器布點情況下,盡量將應答器布點在咽喉區或用于機車折返頻繁的無岔區段,例如圖2中所示應答器2的布點位置。
3.4 車列前方信號機切換
STP系統在牽引作業和無解編推進作業時,更新車列前方信號機信號以車列前方進路區段占紅為觸發條件。給定2個有限狀態1、2及1個觸發事件a構建車列前方信號機切換模型(見圖5)。圖5中,狀態1為車列當前前方信號機1,狀態2為車列前方信號機2;事件a為車列過信號機1的絕緣節。
車列距前方信號機的距離計算如下:當車列越過開放進路上的絕緣節觸發下一區段占紅時,車列距前方信號機距離即剩余進路中下一基本進路包含區段的長度。當機車換向時,換向后前方信號機距坐標原點的距離值與機車距坐標原點距離值的差值(換向后如為推進模式則需減去車列長度)即為車列距前方信號機距離。
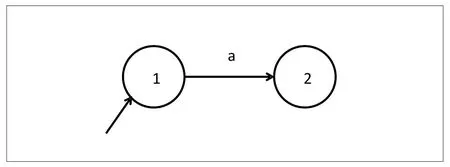
圖5 車列前方信號機切換模型
3.5 特殊情況下機車標簽化處理
在溜放作業時,由于車列在軌道電路中的占紅紅光帶會從中間斷開且前方紅光帶會繼續向前延伸,無法判斷溜放車列的長度,此時車列會丟失前方信號機信號和距離。與此相同的現象會發生在機車牽引列車或推進列車經過前方進路中包含分路不良區段時,已占紅區段由于所含分路不良區段的紅光帶閃爍而從中間斷開,形成前后2個紅光帶。上述情況會干擾基于軌道電路占用邏輯的車列定位功能,從而造成STP系統對車列前方信號機錯誤切換。因此考慮采用標簽化方式對機車與車列的相對位置進行標簽化建模。標簽化功能的實現由STP地面系統完成。以機車的上行方向(從右往左)為例,約定規則如下:
(1)地面系統開機時標簽為0。
(2)移動的紅光帶標簽包含1。
(3)紅光帶合并分為左合和右合2種形式。例如,標簽0左合1記為標簽10,標簽0右合1記為標簽01,標簽0左合0或右合0均記為標簽00,將標簽00簡記為0。紅光帶合并又可細分為2種情況:2個標簽不同時含1的紅光帶合并,2個標簽同時含1的紅光帶合并;共有1010、0101、0110、010四種異常標簽,其中異常標簽0110合并為異常標簽010需司乘人員手動確認,否則維持異常標簽0110不變。紅光帶合并時標簽變化的自動機模型見表1。
(4)考慮地面系統開機時標簽的初始狀態和地面系統運行時存車線經停列車后的標簽狀態,紅光帶中間分斷時標簽變化自動機模型見表2。例如,標簽01的左斷開和右斷開結果一樣,均為標簽0和標簽1,標簽011的左斷開結果為標簽0和標簽11,右斷開結果為標簽01和標簽1。
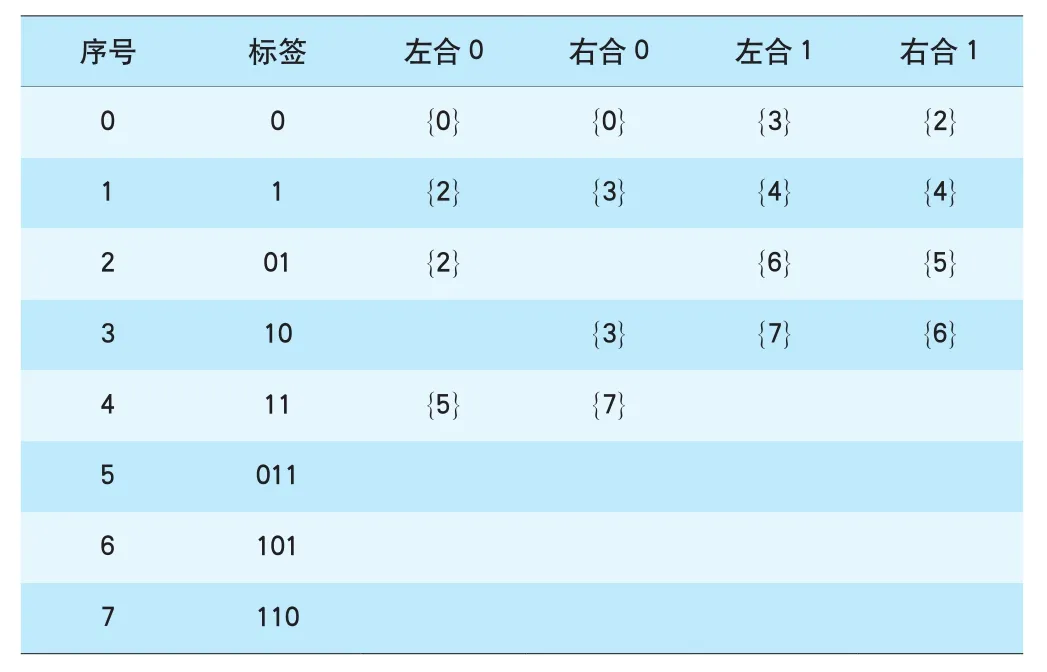
表1 紅光帶合并時標簽變化自動機模型
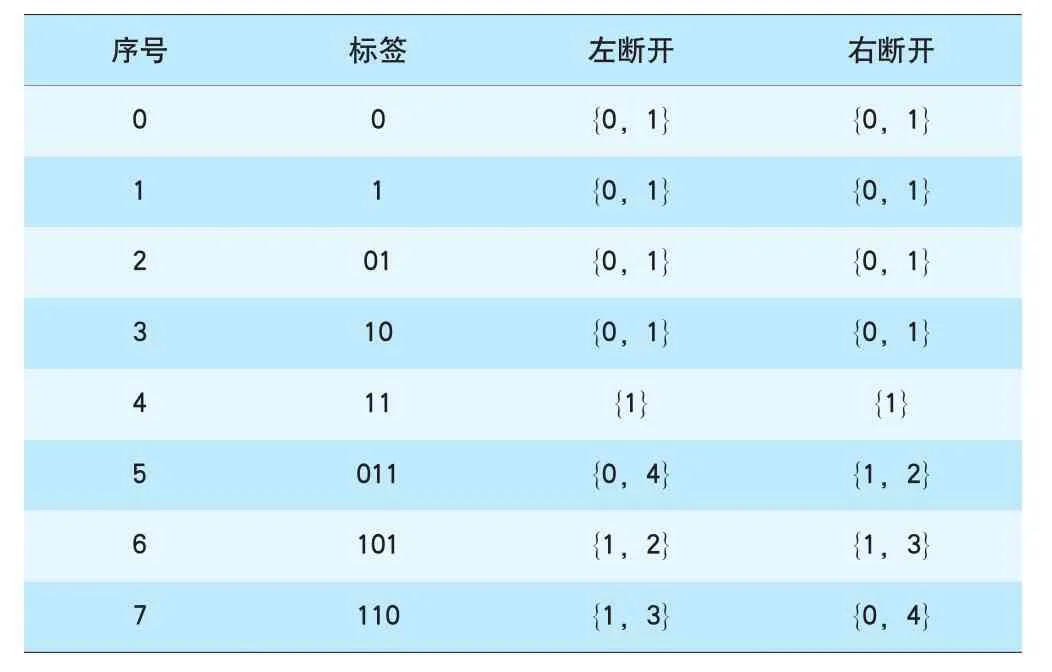
表2 紅光帶中間分斷時標簽變化自動機模型
表1為2個紅光帶合并時標簽狀態變化的自動機模型。第1列是標簽序號,表示標簽所有可能的8種狀態;第2列是標簽內容,用字符串表示;第3列/第5列和第4列/第6列的列值是標簽序號的集合,表示標簽從某一狀態經過左合或右合事件觸發后可能跳轉到的目標標簽,列值為空時表示空集。
表2為2個紅光帶分斷時標簽狀態變化的自動機模型。第1列是標簽序號,表示標簽所有可能的8種狀態;第2列是標簽內容,用字符串表示;第3列和第4列的列值是標簽序號的集合,表示標簽從某一狀態經過左斷開或右斷開事件觸發后可能跳轉到的目標標簽。表2中的第1行和第2行表示STP系統在存車線內已存有機車情況下開機時的初始情況。
當然,STP系統地面設備計算標簽狀態變換還需要STP系統入網機車車載設備返回的車列定位配合計算,才能最終準確無誤地完成特殊情況下標簽狀態的判斷。
3.6 機車坐標丟失情況處理
由于STP設備的穩定性存在局限性,一些特定的故障,例如無線通信異常中斷、STP車載設備與LKJ通信中斷等均會造成機車定位坐標丟失,從而使STP系統對車列前方關閉信號機的防護功能無法正常工作。因此需要對坐標丟失情況進行特殊處理,可以設計STP系統在機車定位坐標丟失時觸發LKJ報警,提示司乘人員STP系統故障,在司乘人員確認STP故障后,該機車自動退網注銷。另外,也可讓STP系統的無線通信網絡搭載在GSM-R通信網上,提高STP系統無線通信的穩定性[5],保證STP系統定位坐標的連續可靠。
4 結束語
將STP系統的定位功能劃分為機車定位和車列定位2部分,并對機車定位采用基于應答器定位+測速傳感器的定位坐標計算模型,以及無線通信實現連續跟蹤,使機車定位擺脫軌道電路分路不良問題的影響,保證機車位置坐標的相對獨立和穩定。采用標簽方式跟蹤機車和車列的相對位置,能夠穩定且準確地獲得機車在車列頭部或尾部的信息,便于STP系統對車列作業模式進行判斷。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08
