基于合成孔徑聚焦成像的超聲衍射時(shí)差法圖像優(yōu)化處理
2019-03-22 05:37:56,,
無損檢測(cè) 2019年3期
關(guān)鍵詞:信號(hào)
,,
(紹興市特種設(shè)備檢測(cè)院,紹興 312071)
作為新技術(shù)之一的超聲衍射時(shí)差法(TOFD)與傳統(tǒng)的超聲波檢測(cè)法不同,TOFD是一種依靠被測(cè)試件內(nèi)部缺陷的端角和端點(diǎn)處得到的超聲波衍射能量來對(duì)缺陷測(cè)深、定高的方法,缺陷定位不依靠信號(hào)振幅,具有可靠性好、定量精度高、信息量豐富、檢測(cè)效率高等優(yōu)點(diǎn)[1-2]。TOFD技術(shù)的這些優(yōu)點(diǎn)特別適合對(duì)焊縫缺陷的尺寸、位置、形狀等信息進(jìn)行精確量化,但由于TOFD探頭覆蓋范圍廣,聲束指向性較差,缺陷在圖像上常呈拋物線形,橫向分辨率存在不足[3-4]。合成孔徑聚焦技術(shù)(SAFT)最先用于合成孔徑雷達(dá),其可以用低指向性的信號(hào)源和較低的工作頻率來獲得較高的方位分辨率[5]。超聲檢測(cè)領(lǐng)域用SAFT來提高超聲圖像的分辨率,如醫(yī)學(xué)上血管內(nèi)超聲成像[6-7]、焊縫高分辨率的超聲重建圖像以及相控陣圖像的重建等[8-9]。在國(guó)內(nèi),也有許多學(xué)者[10-13]對(duì)TOFD圖像的SAFT重建進(jìn)行了研究,有助于提高TOFD圖像的缺陷橫向分辨率,實(shí)現(xiàn)對(duì)距離較遠(yuǎn)缺陷的準(zhǔn)確定位和定量評(píng)估。為了改善SAFT在TOFD領(lǐng)域的應(yīng)用效果,提高TOFD圖像質(zhì)量,從SAFT算法的原理出發(fā),采用維納濾波、匹配濾波、時(shí)移差值等方法對(duì)原始信號(hào)噪聲和相位混疊進(jìn)行抑制,顯著提高了SAFT的處理效果,得到了較好的缺陷圖像分辨率。
1 SAFT成像算法原理
超聲領(lǐng)域的SAFT是根據(jù)各成像點(diǎn)的空間位置,對(duì)接收到的散射信號(hào)作適當(dāng)?shù)穆晻r(shí)延遲或相位延遲后再合成得到的逐點(diǎn)聚焦成像[14],SAFT的方位分辨率只與超聲波激發(fā)晶片的尺寸有關(guān),與聲波頻率和聲程無關(guān),通過SAFT可以使超聲圖像橫向分辨率提高到探頭晶片尺寸的一半[15]。TOFD非平行掃查時(shí)合成孔徑聚焦成像原理示意如圖1所示,一組TOFD探頭以速度v在焊縫兩側(cè)進(jìn)行非平行掃查(D掃),超聲波速度為c,缺陷O處的深度為h,經(jīng)過時(shí)間t后探頭從AA′移動(dòng)到BB′,假設(shè)接收到缺陷衍射波A掃信號(hào)的時(shí)間分別為tA、tB,探頭中心間距(PCS)為2S,由幾何位置關(guān)系可得
(1)
式中:Δt為接收到缺陷波信號(hào)的時(shí)間延時(shí);L=vt,為探頭移動(dòng)的距離;H為缺陷深度。
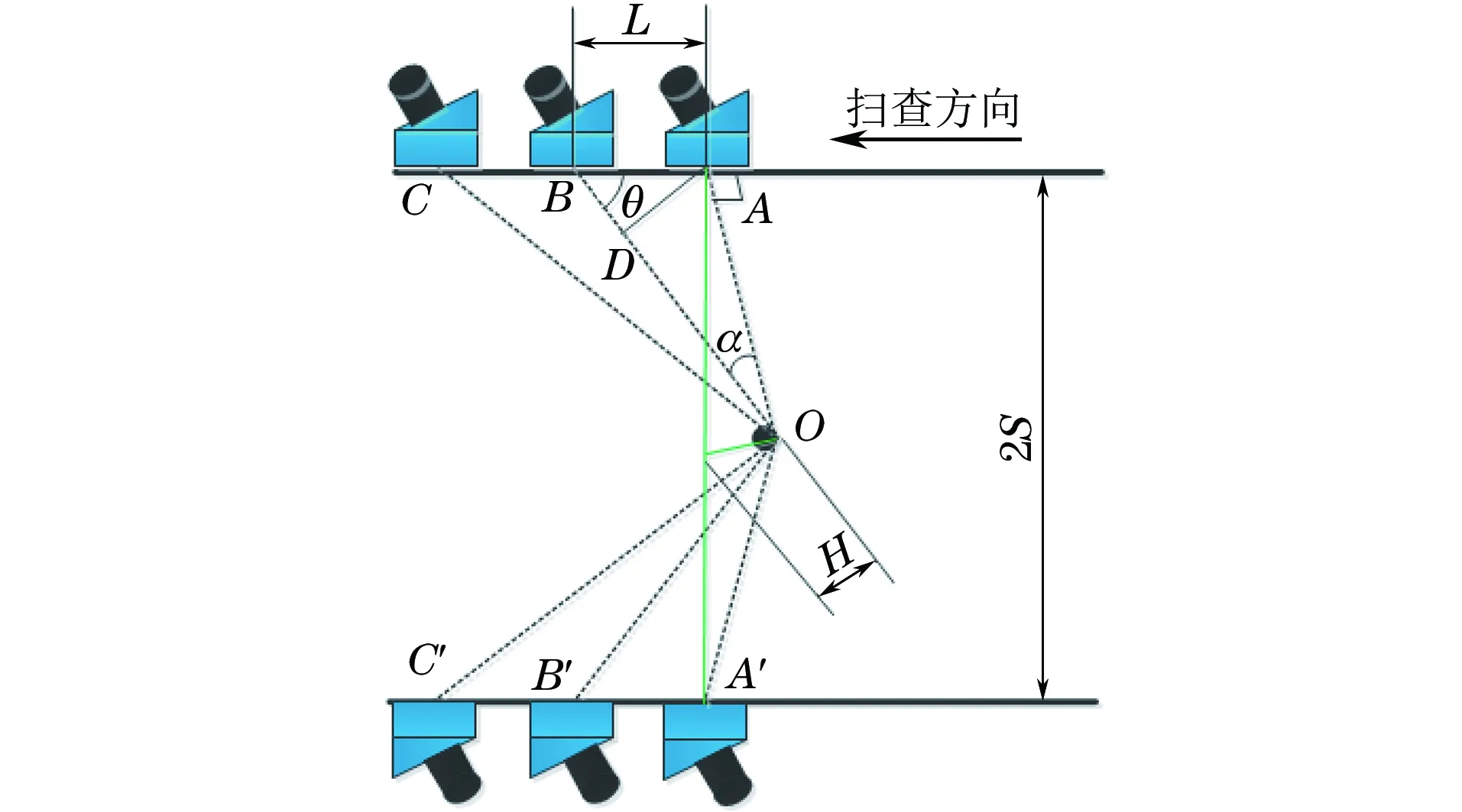
圖1 TOFD非平行掃查時(shí)合成孔徑聚焦成像原理示意
在TOFD檢測(cè)中,A掃信號(hào)在掃查方向上與掃查分辨率ΔL相對(duì)應(yīng),因此探頭移動(dòng)距離L可用nΔL來代替;TOFD圖像中沿掃查方向第i個(gè)A掃信號(hào)中,第j個(gè)AD采樣數(shù)據(jù)點(diǎn)相對(duì)應(yīng)的像素點(diǎn)記為Ai(xi,tj),xi為掃查距離,tj為接收到當(dāng)前數(shù)據(jù)點(diǎn)的時(shí)間。假設(shè)圖1中TOFD探頭在AA′位置時(shí),TOFD圖像中代表缺陷O的圖像點(diǎn)為Ai(xi,tj),則缺陷O距離上表面的深度Hj可表示為
(2)
在式(1)中利用nΔL替代L,Hj替代H,則式(1)可改寫為
(3)
同理,在平行掃查(B掃)時(shí),將TOFD探頭中心點(diǎn)移動(dòng)nΔL距離時(shí),探頭接收到缺陷O散射的A掃信號(hào)的時(shí)間延時(shí)可表示為

(4)
根據(jù)時(shí)間延時(shí)Δtnj對(duì)Ai(xi,tj)進(jìn)行時(shí)運(yùn)算,假設(shè)參與合成孔徑運(yùn)算的數(shù)據(jù)點(diǎn)數(shù)為2N+1,則TOFD圖像中Ai(xi,tj)點(diǎn)的合成孔徑表達(dá)式為
(5)
2 TOFD圖像的信號(hào)處理及SAFT算法實(shí)現(xiàn)
2.1 SAFT的時(shí)移線性插值
SAFT超聲成像需要對(duì)一組鄰近的A掃信號(hào)進(jìn)行時(shí)移運(yùn)算,如式(5)所示,假設(shè)超聲系統(tǒng)的A/D采樣周期為ΔT,記tj-Δtnj為(I+α)ΔT,其中I為整數(shù),α為小數(shù),可以看出,當(dāng)α不為零時(shí),Ai+n(xi+n,tj-Δtnj)代表的點(diǎn)落在兩個(gè)相鄰像素點(diǎn)之間,常規(guī)的方法是在IΔT和(I+1)ΔT之間取距離最近的點(diǎn),這樣不可避免地造成一定的時(shí)移誤差。為了提高時(shí)移運(yùn)算的精度,對(duì)延時(shí)時(shí)移進(jìn)行線性插值處理,如式(6)所示。
Ai+n(xi+n,tj-Δtnj)=Ai+n(xi+n,IΔT)+
α{Ai+n[xi+n,(I+1)ΔT]-Ai+n(xi+n,IΔT)}
(6)
2.2 SAFT的匹配濾波
在TOFD檢測(cè)時(shí),隨著探頭的連續(xù)移動(dòng),接收探頭接收到的缺陷散射信號(hào)的時(shí)間序列發(fā)生延時(shí),而且其相位和頻率也會(huì)變化,這種現(xiàn)象可以用多普勒頻移來解釋。假設(shè)探頭入射波信號(hào)為連續(xù)信號(hào)A(x,t)
(7)
式中:A為信號(hào)幅度;λ為波長(zhǎng)。
則圖1中探頭在BB′位置接收到的缺陷散射信號(hào)為
A(x,t)=CsAexp(i2πct/λ)×
(8)
式中:Cs為入射聲束在O點(diǎn)的散射系數(shù)。

(9)
把式(9)代入式(8)可得
(10)
O點(diǎn)的散射信號(hào)的相位與(nΔL)2呈線性變化,這即是多普勒頻移,可以看出,SAFT成像時(shí)如果僅進(jìn)行時(shí)移運(yùn)算而不考慮相位變化,在下一步進(jìn)行聚焦求和運(yùn)算時(shí)會(huì)造成相位混淆或干擾,引起圖像方位分辨率的下降,因此為了提高SAFT成像品質(zhì),必須要對(duì)此相位變化項(xiàng)進(jìn)行濾波處理。匹配濾波器是最佳線性濾波器的一種,以輸出信噪比最大為準(zhǔn)側(cè),其傳遞函數(shù)是輸入信號(hào)的復(fù)共軛,濾波過程可以理解為求自相關(guān),可以抵消各頻率成分的相位,與式(10)中相位變化項(xiàng)對(duì)應(yīng)的匹配濾波器的沖擊響應(yīng)為
(11)
匹配濾波器對(duì)信號(hào)的處理可以在時(shí)域做卷積運(yùn)算,也可變換到頻域作乘法運(yùn)算,時(shí)域方法通常用于信號(hào)采樣頻率不高、濾波器系數(shù)點(diǎn)較少的情況,利用卷積運(yùn)算來實(shí)現(xiàn)。在TOFD圖像的距離方向上對(duì)參與合成孔徑運(yùn)算的2N+1個(gè)A掃信號(hào)進(jìn)行匹配濾波,考慮到參與運(yùn)算的A掃信號(hào)數(shù)量較少,選用時(shí)域卷積算法,如式(12)所示
(12)
對(duì)于B掃,TOFD探頭垂直于焊縫方向運(yùn)動(dòng),由式(7)可得O點(diǎn)的散射信號(hào)為

(13)
式(13)中的相位變化項(xiàng)對(duì)時(shí)間t求導(dǎo),可得多普勒頻移fd為
(14)
圖2為根據(jù)式(14)得到的不同深度下fd隨掃查距離變化的關(guān)系曲線,2S為40 mm,v為1 m·s-1,可以看出,衍射回波的調(diào)頻斜率隨缺陷深度變化較大,深度較淺時(shí)調(diào)頻斜率呈曲線變化,深度接近于探頭間距的一半時(shí)調(diào)頻斜率趨于恒定,具有線性調(diào)頻信號(hào)的形式。
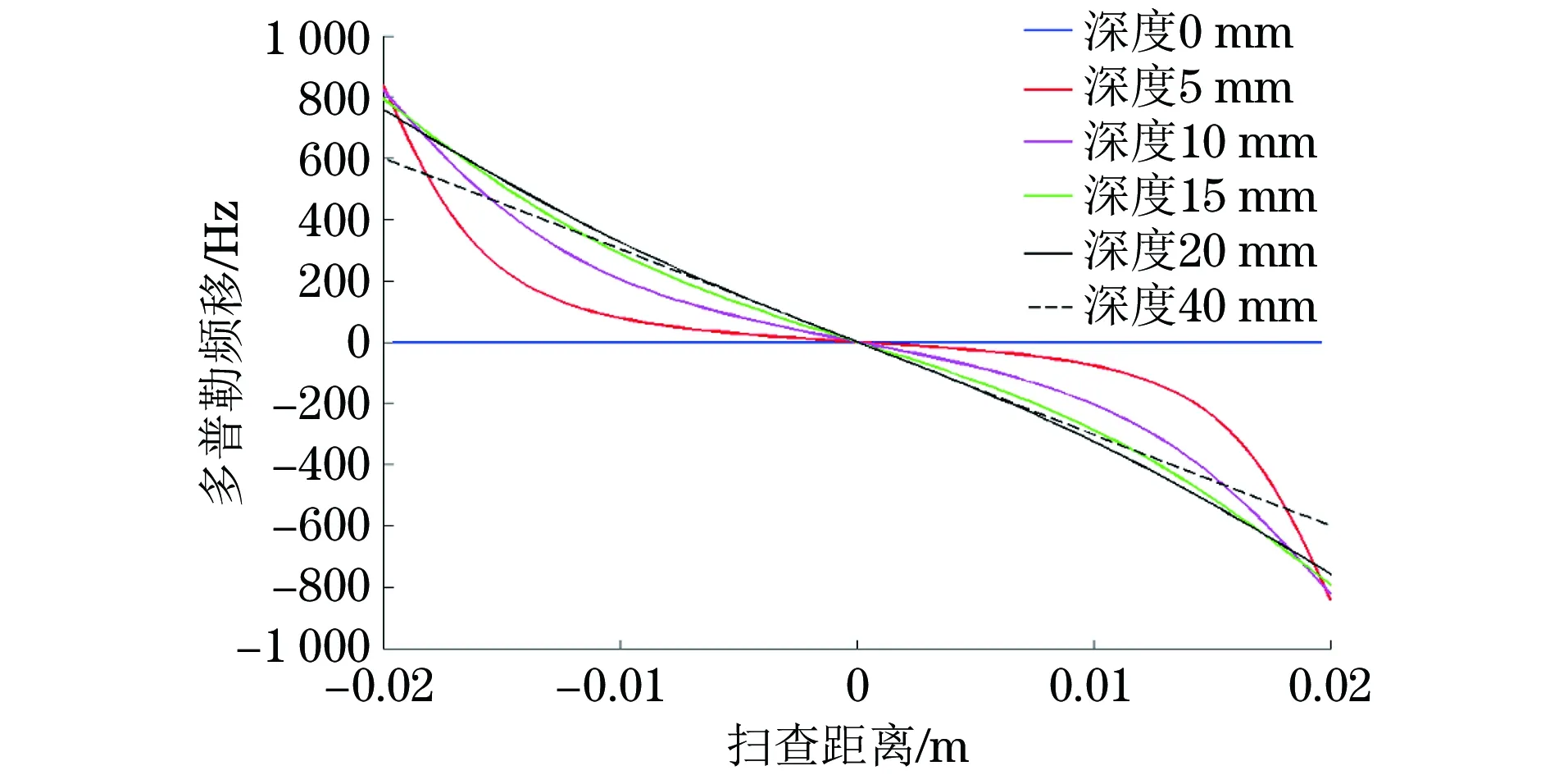
圖2 TOFD法平行掃查時(shí)多普勒頻移fd隨掃查距離變化的關(guān)系曲線
考慮到TOFD法在平行掃查時(shí),探頭一般不越過焊縫,掃查速度v相對(duì)較小,當(dāng)vt?S時(shí),即用來進(jìn)行合成孔徑處理的數(shù)據(jù)窗口在距離遠(yuǎn)小于探頭中心距離的一半時(shí),根據(jù)泰勒近似有
(15)
式(15)的結(jié)果與式(9)的結(jié)果相同,可見當(dāng)滿足合成孔徑窗口距離遠(yuǎn)小于探頭中心間距的一半時(shí),B掃查圖像也可采用與D掃查圖像類似的匹配濾波處理方法。
2.3 超聲波束旁瓣抑制
根據(jù)式(5)對(duì)TOFD圖像進(jìn)行合成孔徑聚焦時(shí),對(duì)孔徑中心位置左右兩側(cè)的A掃信號(hào)進(jìn)行延時(shí)疊加過程中采用的是等權(quán)疊加。由于TOFD采用的是大擴(kuò)散角探頭,波束旁瓣相對(duì)較強(qiáng),采用等權(quán)重疊加會(huì)降低對(duì)旁瓣的抑制,影響合成孔徑聚焦圖像的品質(zhì)。考慮到不同位置數(shù)據(jù)點(diǎn)對(duì)缺陷散射波貢獻(xiàn)率的差異,可以對(duì)合成孔徑窗口不同位置的數(shù)據(jù)進(jìn)行幅度加權(quán)疊加,孔徑中心點(diǎn)分配權(quán)重最高,中心點(diǎn)兩側(cè)權(quán)重依次降低,這樣就有效抑制了參與時(shí)移運(yùn)算的波束旁瓣,這種方法稱為波束幅度變跡。
結(jié)合式(5)可知,需要進(jìn)行幅度變跡處理的A掃信號(hào)數(shù)為2N+1,變跡窗函數(shù)w(n)需滿足在n=0時(shí)取最大值1,n=±N時(shí)取最小值,在保留最大信息的同時(shí)盡可能地消減旁瓣波束,符合上述要求的窗函數(shù)有Hanning函數(shù)和高斯函數(shù)等[17]。經(jīng)窗函數(shù)進(jìn)行幅度變跡處理的合成孔徑聚焦的時(shí)移運(yùn)算可寫作
(16)
2.4 TOFD圖像的維納濾波
SAFT能大大提高超聲波圖像的分辨率,但當(dāng)原始圖像存在較多噪聲時(shí),會(huì)掩蓋圖像細(xì)節(jié)部分,克服這一缺點(diǎn)的方法之一是使用維納濾波與一系列角度相關(guān)參考信號(hào)相結(jié)合的SAFT[16]。維納濾波是一種最優(yōu)線性濾波法,可以對(duì)隨機(jī)信號(hào)作平滑濾波和預(yù)測(cè),在頻域范圍內(nèi)可表示為
(17)
式中:P為濾波去噪后的信號(hào);G為含有噪聲的原始信號(hào);H為維納濾波函數(shù),可由最小均方誤差原理求得;H*表示H的復(fù)共軛函數(shù);k為大小可調(diào)的常數(shù),表示原始圖像的信噪比;ω1,ω2為圖像頻域的兩個(gè)分量。
在實(shí)際的圖像中,一般很難準(zhǔn)確得到圖像信噪比的先驗(yàn)知識(shí),如果把圖像劃分成M個(gè)小塊,在小的局部圖像空間中信號(hào)可認(rèn)為是穩(wěn)定的,對(duì)于均值為零的白化隨機(jī)噪聲V,其功率譜可與方差相等。維納濾波器依次作用在小塊局部圖像空間,濾波函數(shù)P(n1,n2)就可以由局部圖像信息確定,在時(shí)域范圍內(nèi)可表示為
(18)

根據(jù)以上所述的SAFT及信號(hào)處理算法,采用Labview和C++混合編程的方法,編寫了TOFD圖像處理軟件,其核心算法流程如圖3所示。
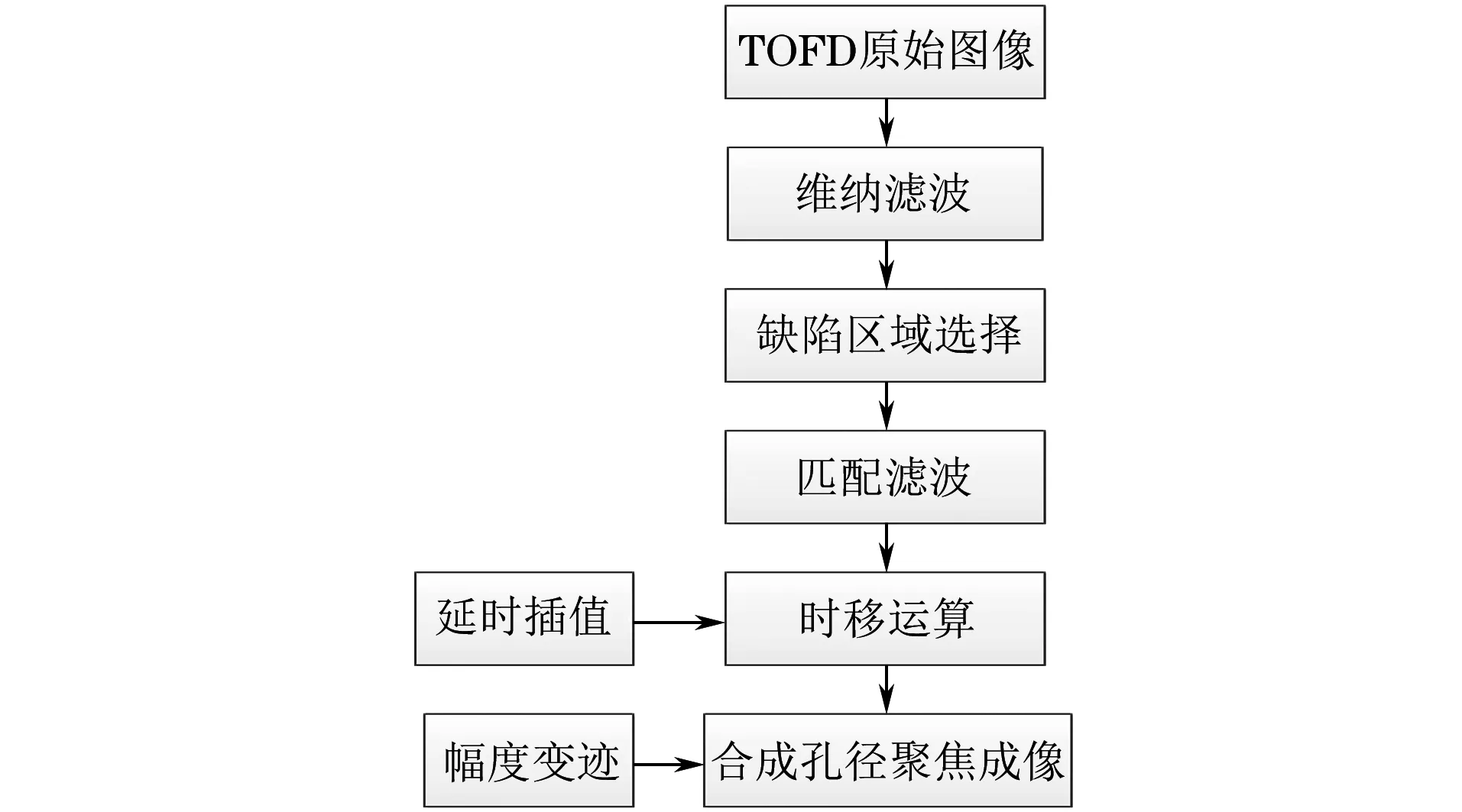
圖3 TOFD圖像處理軟件核心算法流程
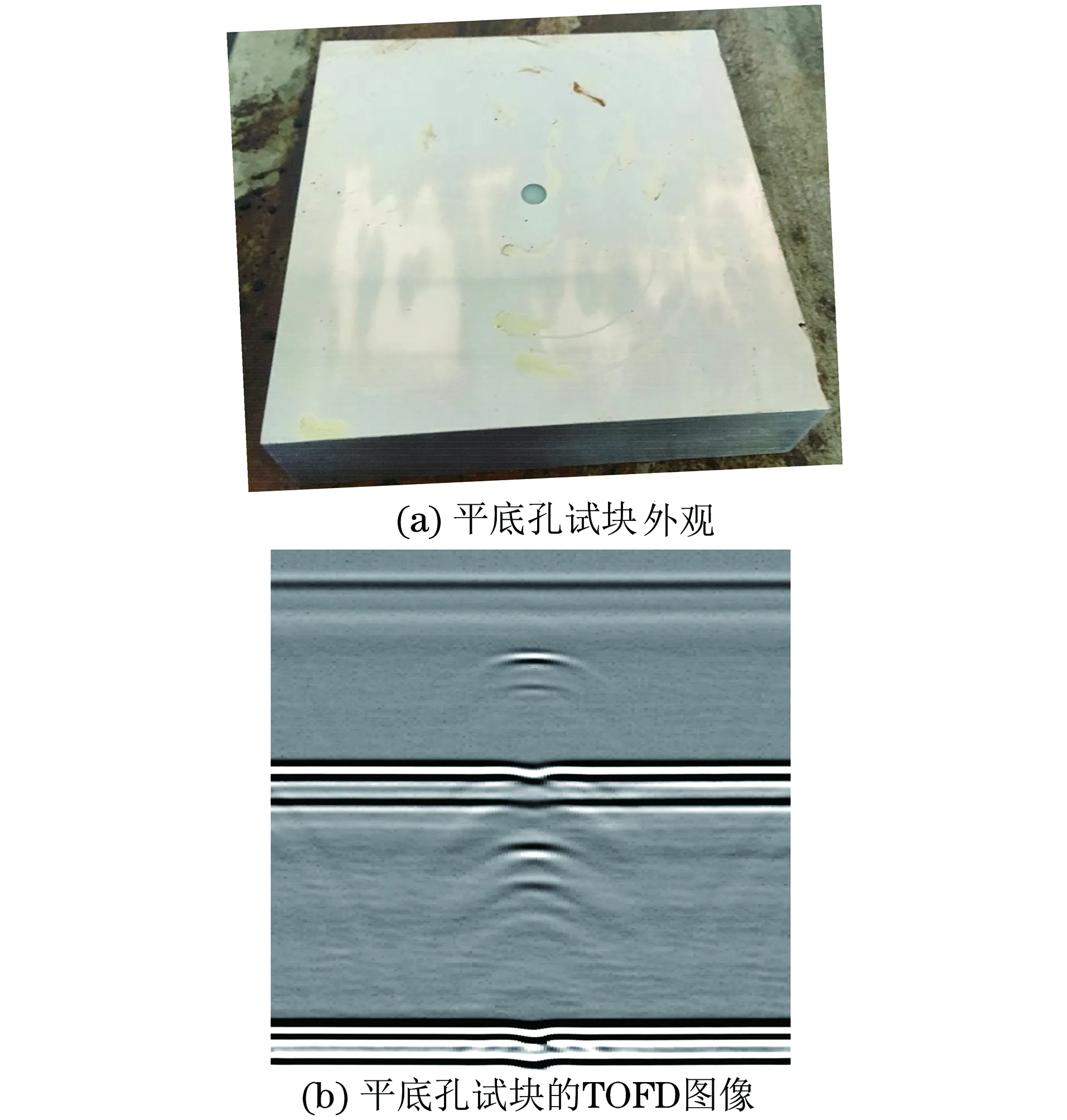
圖4 平底孔試塊外觀及其非平行掃查TOFD圖像
3 試驗(yàn)結(jié)果
圖4(a)為厚度為25 mm的鋼制試塊,其中心有一個(gè)φ5.6 mm的平底孔,距離開口表面的深度為10 mm,圖4(b)為其TOFD非平行掃查(D掃)圖像,掃查面在開口面的相對(duì)面,掃查長(zhǎng)度為80 mm,其中維納濾波窗口大小為4×4,TOFD采樣頻率為100 MHz,探頭規(guī)格為φ6 mm,探頭角度為60°,中心頻率為5 MHz,2S為56 mm。從圖4(b)可看出,平底孔上端的TOFD圖像呈雙圓弧狀,靠近直通波的弧線比較明顯,為平底孔的主散射圖像,下部較短的弧線由部分聲波沿平底孔邊緣散射引起,其位置在主信號(hào)之后,且強(qiáng)度較弱。由于TOFD探頭的擴(kuò)散角較大,旁瓣效應(yīng)明顯,平底孔端部?jī)蓚?cè)的衍射弧相互疊加,因此缺陷的橫向分辨率降低。
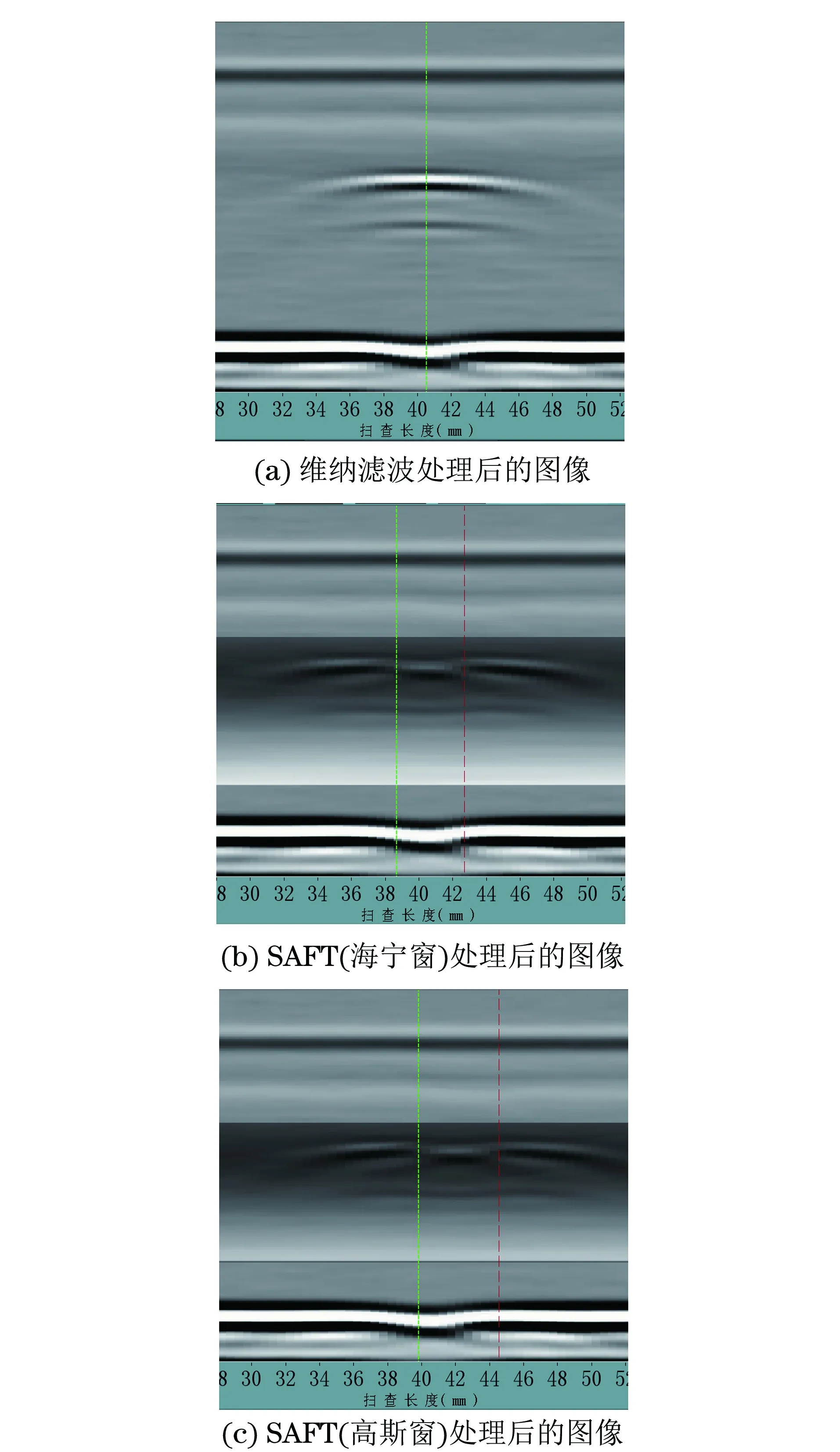
圖5 經(jīng)過軟件處理后的平底孔TOFD圖像
圖5(a)為經(jīng)過維納濾波后的平底孔圖像,背景噪聲基本被去除,圖5(b)和5(c)為經(jīng)SAFT處理后的圖像,其中圖5(b)為海寧窗變跡處理的圖像,圖5(c)為高斯窗變跡處理圖像,圖中的虛線為游標(biāo)線,圖底為長(zhǎng)度標(biāo)尺,可看出經(jīng)SAFT處理后,原有的衍射弧分解重構(gòu)為三段離散條紋,中間的水平條紋清晰地指示出了平底孔的位置和長(zhǎng)度,經(jīng)測(cè)量分別為4.1,4.7 mm,與處理前相比缺陷的橫向分辨率提高了。對(duì)比圖5(b)和圖5(c)還發(fā)現(xiàn):海寧窗變跡對(duì)衍射波的抑制程度要優(yōu)于高斯窗變跡對(duì)衍射波的抑制程度,而且高斯窗變跡處理后的圖像存在一定的偏移,比如圖5(a)中缺陷圖像的中心位置約為40. 5 mm,圖5(b)中缺陷圖像的中心位置約為40.6 mm,而圖5(c)中缺陷圖像的中心位置約為42.1 mm,圖5(c)中的結(jié)果明顯大于圖5(a)和圖5(b)中的結(jié)果。
圖6(a)為厚度為20 mm的焊接試板外觀,圖6(b)為其D掃圖像,包括直通波、底波以及二者之間的缺陷衍射圖像,掃查長(zhǎng)度為250 mm,探頭中心間距為38 mm,整個(gè)圖譜經(jīng)過4×4窗口大小的維納濾波處理。對(duì)圖中紅色方框內(nèi)的TOFD圖譜進(jìn)行SAFT處理,孔徑數(shù)為27,處理后的結(jié)果如圖6(c)所示。對(duì)比發(fā)現(xiàn),經(jīng)SAFT處理后抑制了缺陷處的弧狀衍射波,提高了缺陷的橫向分辨率。
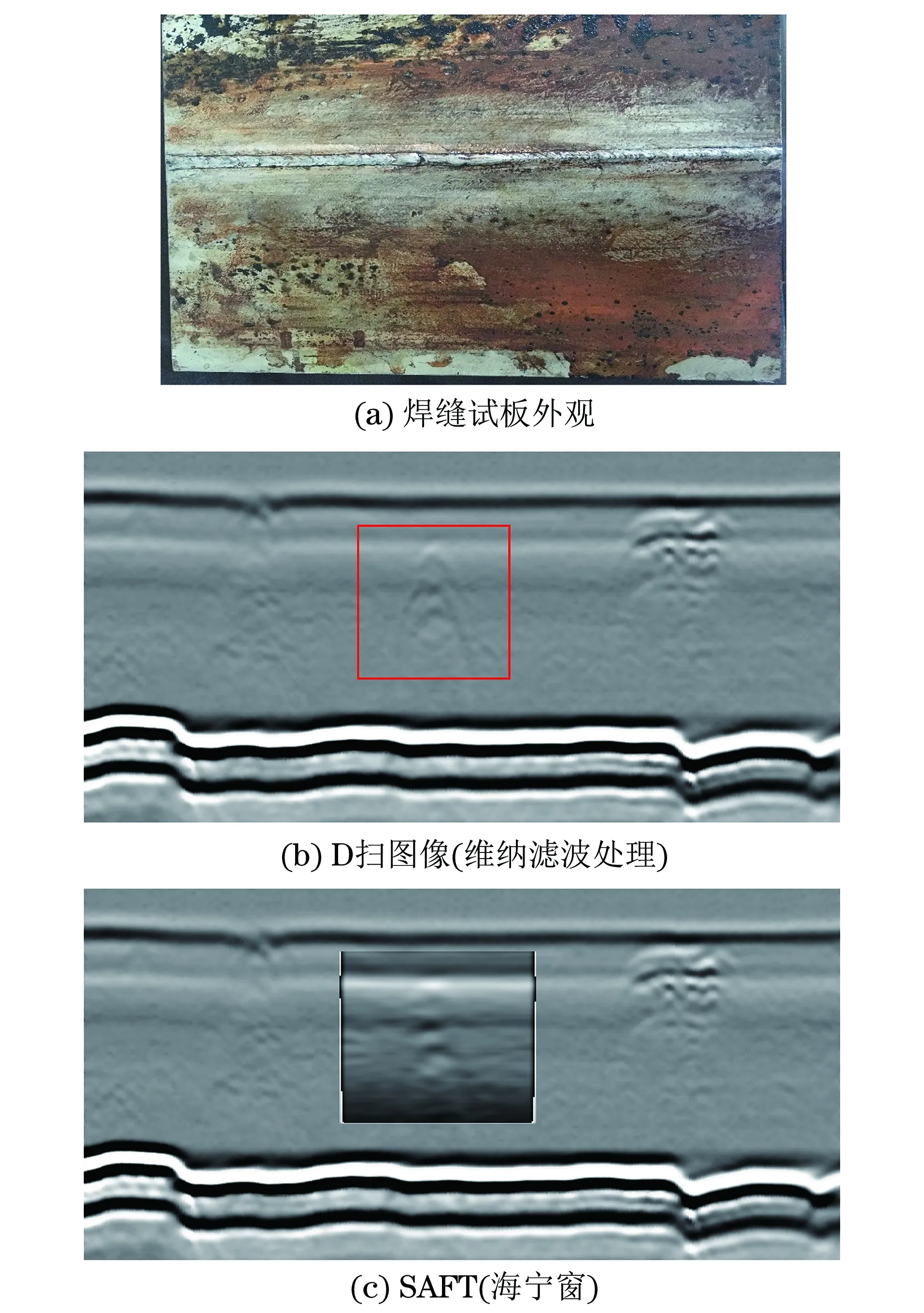
圖6 焊接試板外觀及其D掃TOFD圖像
4 結(jié)論
從SAFT的基本原理出發(fā)建立了D掃和B掃TOFD圖像的合成孔徑聚焦成像模型,研究了匹配濾波和維納濾波等方法在TOFD圖像上的實(shí)現(xiàn)途徑。對(duì)TOFD圖像信號(hào)處理算法進(jìn)行了優(yōu)化設(shè)計(jì),實(shí)現(xiàn)了TOFD圖像的合成孔徑聚焦技術(shù)與匹配濾波、維納濾波、旁瓣抑制等算法的綜合集成,并通過自編軟件進(jìn)行了試驗(yàn)驗(yàn)證。結(jié)果表明,提出的合成孔徑聚焦圖像重建算法成功實(shí)現(xiàn)了對(duì)TOFD圖像的重建,有效提高了缺陷的橫向分辨率,有助于TOFD技術(shù)的實(shí)現(xiàn)。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國(guó)病理生理雜志(2015年8期)2015-12-21 12:38:06
