混合裝配線平衡中的工效學(xué)和裝配空間聯(lián)合優(yōu)化研究
2019-03-21 05:50:38蔡敏黃剛汪挺沈瓊瑋
人類工效學(xué) 2019年6期
關(guān)鍵詞:作業(yè)
蔡敏,黃剛,汪挺,沈瓊瑋
( 杭州電子科技大學(xué) 工業(yè)工程與管理研究所,杭州 310018 )
1 引言
混合裝配線平衡問(wèn)題(MMixed-Model Assembly Line Balancing Problem,簡(jiǎn)稱 MALB-P)是指在滿足作業(yè)任務(wù)的優(yōu)先級(jí)關(guān)系約束和節(jié)拍時(shí)間約束的情況下,將作業(yè)任務(wù)通過(guò)合理的組合,均衡地分配給各工位的過(guò)程[1~3]。混合裝配線具有柔性系統(tǒng)的特性、能快速響應(yīng)不斷變化的客戶個(gè)性化需求,但混合裝配線的產(chǎn)品種類、作業(yè)任務(wù)的復(fù)雜程度和操作者的作業(yè)負(fù)荷要高于單一產(chǎn)品裝配線。一方面,過(guò)度的工效學(xué)負(fù)荷不僅會(huì)降低操作者的生產(chǎn)效率,且極易引發(fā)肌肉骨骼疾病(Musculo-Skeletal Disorder,簡(jiǎn)稱 MSDs)[4];另一方面,產(chǎn)品種類增加會(huì)導(dǎo)致裝配線邊庫(kù)存成本急劇上升,在進(jìn)行裝配線的平衡設(shè)計(jì)時(shí),平衡方案決定了各工位的線邊庫(kù)存水平。因此,在進(jìn)行裝配線的平衡優(yōu)化時(shí),必須綜合考慮工效學(xué)和空間約束,使混合裝配線在平穩(wěn)生產(chǎn)的前提下,降低操作者作業(yè)負(fù)荷和線邊庫(kù)存成本,幫助制造企業(yè)朝著高效和人性化生產(chǎn)的方向發(fā)展。
裝配線平衡(Assembly Line Balance,ALB)的概念最早是由美國(guó)學(xué)者布萊頓于1954年在他的碩士論文“連續(xù)裝配線平衡”中首次提出[5]。此后,許多國(guó)內(nèi)外的研究學(xué)者基于實(shí)際生產(chǎn)情況,從不同的角度出發(fā)構(gòu)建了更契合實(shí)際生產(chǎn)活動(dòng)裝配線平衡模型,大大提高了制造企業(yè)的生產(chǎn)效率和經(jīng)濟(jì)效益。Bautista等[6]將時(shí)間和空間因素納入SALBP,構(gòu)建了考慮裝配空間約束的裝配線平衡模型(Time and Space constrained Assembly Line Balancing Problem, TSALBP),認(rèn)為在進(jìn)行裝配線平衡時(shí),不僅要滿足時(shí)間約束和優(yōu)先關(guān)系約束,并且各工位上的物料和設(shè)備占用的空間大小不能超過(guò)最大可用裝配空間大小。Otto等[7]將操作者的工效學(xué)風(fēng)險(xiǎn)納入SALBP模型中。Bautista等[8-9]在此基礎(chǔ)上定義了TSALBP-ergo模型,分析了操作者可接受的最大風(fēng)險(xiǎn)對(duì)工位數(shù)量的影響,并通過(guò)混合整數(shù)線性規(guī)劃來(lái)尋求最小化站點(diǎn)的最大人體工程學(xué)風(fēng)險(xiǎn)的方案。但這些研究大都是以傳統(tǒng)簡(jiǎn)單裝配線為研究對(duì)象,并且采用傳統(tǒng)工效學(xué)評(píng)估方法評(píng)估操作者的工效學(xué)風(fēng)險(xiǎn),但傳統(tǒng)的工效學(xué)評(píng)估方法大都采用定性或半定量的方式,很難將工效學(xué)目標(biāo)納入MALB-P模型的目標(biāo)函數(shù)中,Battini等[10-11]引入了預(yù)定動(dòng)作能耗系統(tǒng)來(lái)快速估計(jì)操作者的能量消耗,但沒(méi)有考慮空間約束問(wèn)題,也沒(méi)有對(duì)混合裝配線中操作者的能量消耗問(wèn)題進(jìn)行研究。因此,本文以最小化工位個(gè)數(shù)和平滑指數(shù)為目標(biāo),即針對(duì)第1類混合裝配線平衡的工效學(xué)和裝配空間問(wèn)題進(jìn)行了研究,構(gòu)建了混合裝配線平衡的工效學(xué)和裝配空間聯(lián)合優(yōu)化模型。
2問(wèn)題描述與假設(shè)
2.1 問(wèn)題描述
考慮工效學(xué)和空間約束第1類混合裝配線問(wèn)題有以下幾個(gè)假設(shè):
(1)裝配線的節(jié)拍時(shí)間、各作業(yè)任務(wù)的作業(yè)時(shí)間、所需物料占用的空間大小和所需能量消耗量以及裝配線相關(guān)信息都已知;
(2)各作業(yè)任務(wù)時(shí)間tjm之間是相互獨(dú)立,不考慮操作者對(duì)作業(yè)時(shí)間的影響;
(3)不考慮產(chǎn)品投產(chǎn)排序,且混合裝配生產(chǎn)的產(chǎn)品投產(chǎn)比例已知。
2.2 模型相關(guān)參數(shù)說(shuō)明
模型相關(guān)參數(shù)如下:
K表示所需工位的數(shù)量上限;
I表示作業(yè)元素的集合I={1,2...,N};
aj表示作業(yè)任務(wù)j的物料所需的物料空間大小;
xjk表示當(dāng)作業(yè)任務(wù)分配到工位K時(shí),其值為1,否則值為零;
S表示裝配線的工位數(shù)量;
SI表示裝配線的平衡指數(shù);
Tk表示分配給工位k的作業(yè)任務(wù)總時(shí)間;
Tmk表示分配到工位k的第m種產(chǎn)品的作業(yè)任務(wù)時(shí)間;
Emk表示分配到工位k的第m種產(chǎn)品的作業(yè)任務(wù)的能量消耗量;
Ek表示完成分配給工位k的作業(yè)任務(wù)所需的能量消耗量;
(Ek表示完成分配給工位k的作業(yè)任務(wù)的平均能量消耗率;
RAk表示完成分配給工位k的作業(yè)任務(wù)的寬放系數(shù);

3 模型構(gòu)建
本文研究的第1類混合裝配線平衡的工效學(xué)和裝配空間的聯(lián)合優(yōu)化問(wèn)題,即給定生產(chǎn)節(jié)拍c,求滿足約束條件下的最小化工位數(shù)。根據(jù)上節(jié)描述,可建立第1類混合裝配線平衡的工效學(xué)和裝配空間的聯(lián)合優(yōu)化問(wèn)題的模型如下[13~16]:

(1)
平衡指數(shù)是評(píng)估平衡優(yōu)化效果的重要指標(biāo),平衡指數(shù)越小,各工位的負(fù)荷越均衡。

(2)
因此在進(jìn)行裝配線平衡時(shí),為了獲得更好的平衡優(yōu)化效果,構(gòu)造目標(biāo)函數(shù)如下:
(3)

(4)
優(yōu)先級(jí)約束:
(5)
工位空間約束:
(6)
單位周期內(nèi)M種產(chǎn)品的第j個(gè)零件的空間:

(7)
分配到工位k上的第m種產(chǎn)品的作業(yè)任務(wù)時(shí)間:
(8)
工位k的作業(yè)任務(wù)的任務(wù)總時(shí)間不超過(guò)節(jié)拍時(shí)間:
(9)
為了降低裝配線上操作者的MSDs風(fēng)險(xiǎn),研究者已經(jīng)開(kāi)發(fā)了多種評(píng)估MMH風(fēng)險(xiǎn)值的方法。如NIOSH提舉方程,OWAS方法和歐洲裝配工作表。NIOSH提舉方程或OWAS指數(shù),只適用于評(píng)估執(zhí)行特定任務(wù)的半定量風(fēng)險(xiǎn)指數(shù),對(duì)于在不同的作業(yè)姿勢(shì)的評(píng)估有一定的局限性,如NIOSH提舉方程僅計(jì)算提升任務(wù)的瞬時(shí)推薦重量限制,而OWAS是非常嚴(yán)格的制定重量限制,很難運(yùn)用于一個(gè)優(yōu)化模型的目標(biāo)函數(shù)。為了在裝配線平衡模型中考慮工效學(xué)因素,Garg等[17-19]開(kāi)發(fā)了一種能快速估算能量消耗率的方法,能量消耗率是維持不同的身體姿勢(shì)(如坐,站立,彎腰)和動(dòng)作(如舉起,放下、搬運(yùn)、握持)所需總能量與執(zhí)行任務(wù)所需總時(shí)間的比值,能量消耗率受性別、體重、負(fù)荷大小、提舉的垂直高度、搬運(yùn)距離、搬運(yùn)過(guò)程行走的速度、工作的姿勢(shì)和持續(xù)時(shí)間的影響。對(duì)于給定任務(wù)i,完成該任務(wù)的平均能量消耗率可以表述為:
(10)

分配到工位k上的第m種產(chǎn)品的作業(yè)任務(wù)的能量消耗量:

(11)
完成分配到工位k的作業(yè)任務(wù)所需的能量消耗量:

(12)
完成分配到工位k的作業(yè)任務(wù)的能量消耗指數(shù):
(13)
完成分配到工位k的作業(yè)任務(wù)的寬放系數(shù):

(14)
考慮工效學(xué)后工位k作業(yè)任務(wù)的時(shí)間:
(15)
(16)

(17)
考慮工效學(xué)因素的節(jié)拍約束:

(18)
4 算法設(shè)計(jì)
第1類混合裝配線平衡的工效學(xué)和裝配空間的聯(lián)合優(yōu)化問(wèn)題是典型的組合優(yōu)化問(wèn)題。因此,本文的求解算法可采用遺傳算法,使用遺傳算法求解考慮工效學(xué)和空間約束的混合裝配線平衡問(wèn)題時(shí)的流程圖如圖1所示。
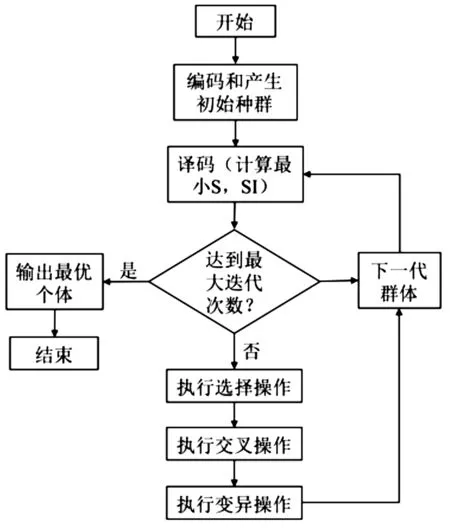
圖1 遺傳算法流程
4.1 編碼和產(chǎn)生初始種群
初始種群由若干個(gè)體編碼組成。初始種群產(chǎn)生的思路是:(1)隨機(jī)產(chǎn)生一個(gè)滿足約束的解;(2)對(duì)該解編碼,其步驟如下:
步驟1 設(shè)個(gè)體計(jì)數(shù)器count=1
步驟2 可行解的產(chǎn)生:
(1)作業(yè)任務(wù)的集合TK={tk1,tk2,…tkN};
(2)集合PK表示在集合TK中沒(méi)有緊前任務(wù)的作業(yè)任務(wù);
(3)假設(shè)k為工位編號(hào),k∈(1,2,…K),初始化第一個(gè)工位ktk=kt1;
(4)隨機(jī)從集合PK中選擇一個(gè)作業(yè)任務(wù)akj(akj∈PK)分配給當(dāng)前工位ktk;
(5)同時(shí)判斷當(dāng)前工位考慮工效學(xué)因素后的作業(yè)時(shí)間是否超過(guò)節(jié)拍時(shí)間c、所需物料占用空間大小是否超過(guò)裝配空間A,若其中某項(xiàng)超過(guò),則需重新進(jìn)行作業(yè)任務(wù)的分配,轉(zhuǎn)(7);否則轉(zhuǎn)(4);
(6)刪除TK中的作業(yè)元素akj,并重新統(tǒng)計(jì)集合PK,然后轉(zhuǎn)至(5);
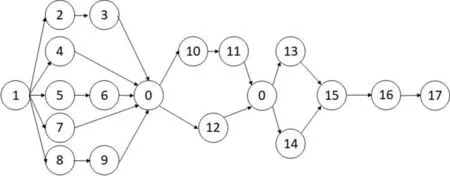
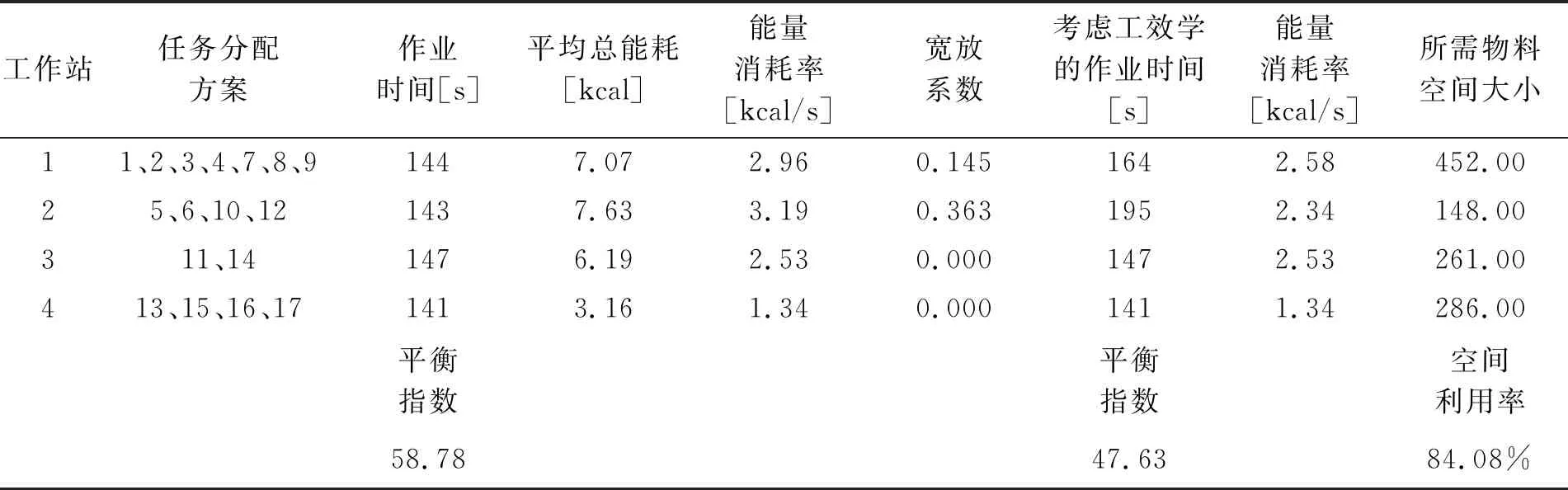
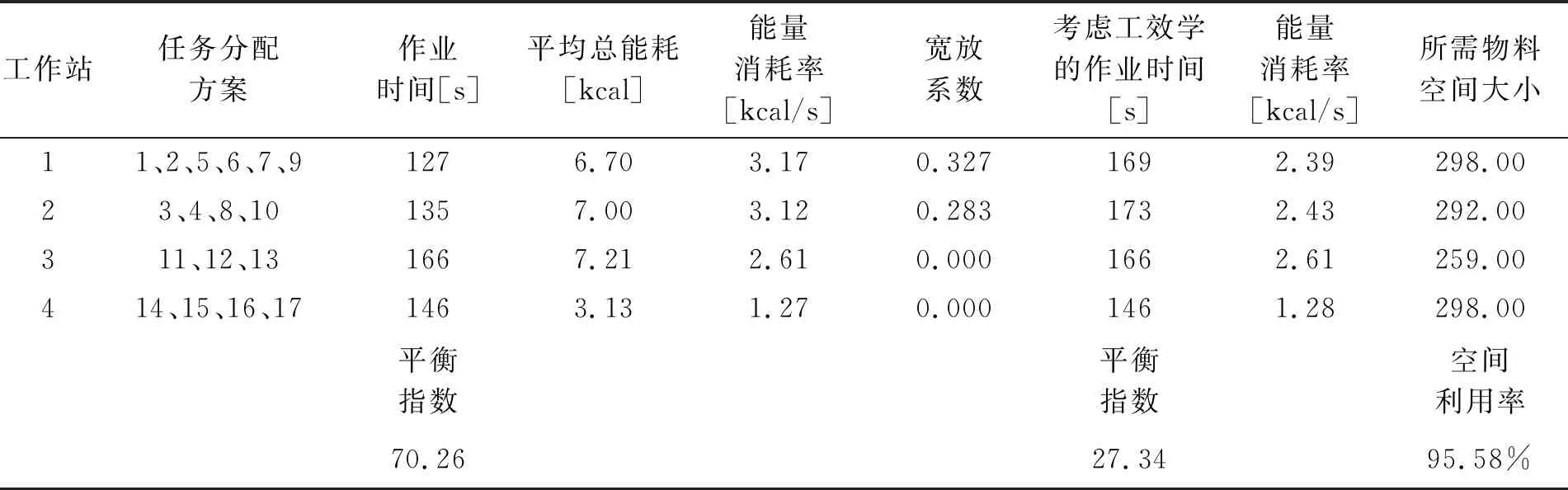
(7)K=k+1,如果s (8)把未分配的任務(wù)安排到工位ktN; (9)檢查最后一個(gè)工位ktN考慮工效學(xué)因素后的作業(yè)時(shí)間是否超過(guò)節(jié)拍c、所需物料占用空間大小是否超過(guò)裝配空間A,若都沒(méi)有超過(guò),轉(zhuǎn)至步驟三;否則,轉(zhuǎn)至步驟2。 步驟3 編碼步驟2中產(chǎn)生的可行解。 步驟4 若co+1 ≤ top_size,co =co+1,轉(zhuǎn)步驟2,否則轉(zhuǎn)步驟5。 步驟5 結(jié)束 譯碼是指根據(jù)基因編碼后的操作順序,將作業(yè)任務(wù)依次分配到各工位上的過(guò)程。首先在滿足考慮工效學(xué)因素后的作業(yè)時(shí)間不超過(guò)節(jié)拍c、所需物料占用空間大小不超過(guò)裝配空間A等條件下,根據(jù)編碼過(guò)程中的作業(yè)任務(wù)順序,運(yùn)用貪心算法把盡量多的作業(yè)任務(wù)放置在同一工位,并根據(jù)作業(yè)任務(wù)的劃分求出各工位作業(yè)時(shí)間、所需工位數(shù)量和平衡指數(shù),譯碼過(guò)程如圖2所示。 圖2 編碼、譯碼示意圖 為了更好地保留父代基因中的有效部分,本文采用次序交叉法進(jìn)行交叉操作,即任意選取在選擇操作過(guò)程產(chǎn)生的新種群中選取兩個(gè)個(gè)體染色體,隨機(jī)生成一個(gè)叉點(diǎn),過(guò)程如下: 第1步:隨機(jī)產(chǎn)生交叉點(diǎn)。 第2步:進(jìn)行交叉,選取父代1交叉點(diǎn)左側(cè)部分染色體進(jìn)入子代1 。 第3步:根據(jù)父代2生成子代1染色體。 第4步:交換父代位置,產(chǎn)生子代2。 變異和交叉都是遺傳算法的輔助性搜索操作,其目的是為了維持算法在尋優(yōu)過(guò)程中種群的多樣性。本文通過(guò)使用隨機(jī)產(chǎn)生的一個(gè)新的染色體去替代滿足變異概率條件下的原染色體。 在遺傳算法中,適應(yīng)度函數(shù)值一般為正,數(shù)值較大適應(yīng)度函數(shù)可以提高進(jìn)入下一代的染色體越的概率和優(yōu)良性,本文結(jié)合范維博等[21]的研究,構(gòu)造適應(yīng)度函數(shù)如下: f(i)=0.9λS+SI (18) 其中SI為平衡指數(shù),S為最小工位數(shù)。由于目標(biāo)函數(shù)是小于1的冪函數(shù)的指數(shù),目標(biāo)函數(shù)越小,適應(yīng)度函數(shù)越大,此時(shí)可獲得最小工位數(shù)量和最小平衡指數(shù)。 常用的選擇操作方法有輪盤賭選擇法,然而,在進(jìn)行選擇操作時(shí)無(wú)法判斷在迭代過(guò)程中進(jìn)入下一代的個(gè)體是否都是比較優(yōu)良的,這種缺陷可能會(huì)導(dǎo)致新種群的退化,而通過(guò)結(jié)合最優(yōu)個(gè)體保留策略即可確保進(jìn)入下一代的種群都是比較優(yōu)良的。因此,本文的選擇操作結(jié)合這兩種相結(jié)合的方法,彌補(bǔ)了其各自的優(yōu)缺點(diǎn)。 某制造企業(yè)中的一條混合裝配線需要同時(shí)對(duì)三種結(jié)構(gòu)相似、工藝相近、比例為1:2:1的產(chǎn)品A、B和C進(jìn)行裝配。混合裝配線的生產(chǎn)節(jié)拍為173 s,產(chǎn)品的綜合作業(yè)任務(wù)優(yōu)先約束關(guān)系如圖3所示(其中任務(wù)0為虛任務(wù)不占用時(shí)間和裝配空間),每個(gè)任務(wù)作業(yè)時(shí)間和所需物料占用的空間大小數(shù)據(jù)見(jiàn)表1,各工站的最大可用空間大小為300,tjA、tjB和tjC分別表示不同型號(hào)的產(chǎn)品A、B和C第j個(gè)任務(wù)的作業(yè)時(shí)間;tj表示不同型號(hào)的產(chǎn)品以需求比例為權(quán)值的加權(quán)平均值,通過(guò)加權(quán)處理將混合裝配線平衡問(wèn)題轉(zhuǎn)化為簡(jiǎn)單裝配線平衡問(wèn)題。 圖3 作業(yè)任務(wù)綜合優(yōu)先順序關(guān)系圖 表1 各作業(yè)任務(wù)的時(shí)間、能量消耗量和物料空間大小 注:此處的體積是量綱為1的量。 為了進(jìn)一步分析作業(yè)任務(wù)的工效學(xué)約束和空間約束對(duì)線平衡優(yōu)化過(guò)程的影響,本文設(shè)置了四組對(duì)比實(shí)驗(yàn),即方案一:不考慮工效學(xué)約束和空間約束的裝配線平衡方案;方案二:考慮工效學(xué)約束的裝配線平衡方案;方案三:考慮空間約束的裝配線平衡方案;方案四:考慮工效學(xué)約束和空間約束的集成優(yōu)化方案。首先,本文根據(jù)工位數(shù)量、節(jié)拍時(shí)間、平衡指數(shù)、空間利用率、能量消耗率等指標(biāo)進(jìn)一步的分析了各方案之間的差異。其次,按照上一節(jié)中介紹的啟發(fā)式算法,利用MatlabR2014a軟件編寫了遺傳算法的程序,其中的基本參數(shù)設(shè)置如下:假設(shè)初始種群大小為200,適應(yīng)度函數(shù)中的λ值為0.02,交叉概率和變異概率分別設(shè)定為0.7和0.2。各方案的仿真結(jié)果如表2、3、4、5所示: 如表2所示方案一中,在不考慮工效學(xué)和空間約束的情況下,最小工位數(shù)量為4、平衡指數(shù)為58.78。工位1和2上操作者的平均能量消耗率超過(guò)工效學(xué)上限,如果操作者長(zhǎng)期處于高負(fù)荷的狀態(tài),必會(huì)損害其身心健康和導(dǎo)致人因失誤概率增加,因此,有必要為負(fù)荷較高的工位提供寬放時(shí)間,降低操作者的累積疲勞,但工位2上考慮工效學(xué)因素的作業(yè)時(shí)間超出節(jié)拍大小。另一方面,工位1物料所需空間大小為452,超過(guò)了最大可用空間大小。因此,有必要綜合考慮工效學(xué)和空間約束,尋找新的平衡方案。 表2 方案一:傳統(tǒng)裝配線平衡問(wèn)題結(jié)果分析 表3 方案二:考慮工效學(xué)的平衡方案結(jié)果分析 表4 方案三:考慮空間約束的平衡方案結(jié)果分析 方案二、方案三均僅考慮單一約束對(duì)裝配線平衡的影響。如表3所示,方案二在只考慮工效學(xué)約束的情況下,最小工位數(shù)量為4。相比較于方案一,裝配線的平衡指數(shù)由47.63下降到27.26,同時(shí)降低了操作者的工效學(xué)負(fù)荷,各工位的作業(yè)時(shí)間均未超過(guò)節(jié)拍時(shí)間。然而,由于方案二沒(méi)有考慮物料的空間需求,工位1的物料空間大小超出裝配空間限制,提高了生產(chǎn)線的庫(kù)存成本。如表4所示,方案三在只考慮裝配空間約束的情況下,最小工位數(shù)量和平衡指數(shù)分別為4和59.09,各工位物料空間大小均未超出裝配空間限制。相較于方案一,整個(gè)生產(chǎn)線的空間利用率顯著提升,但工位2上操作者的能量消耗率水平超出了可接受的工效學(xué)水平,考慮工效學(xué)因素后工位2的作業(yè)時(shí)間超出了節(jié)拍時(shí)間,會(huì)造成生產(chǎn)過(guò)程中裝配線的堵塞,需要增加額外的工位。因此,應(yīng)該在進(jìn)行裝配平衡的同時(shí)考慮工效學(xué)約束和空間約束。 如表5中方案四所示,在同時(shí)考慮工效學(xué)約束和空間約束的情況下,最小工位數(shù)量和平衡指數(shù)分別為4和70.26,平衡指數(shù)明顯高于相較于方案一、二和三,但考慮工效學(xué)后的實(shí)際平衡指數(shù)遠(yuǎn)低于方案一和三、略高于方案二,這是因?yàn)榉桨付纯紤]物料裝配空間大小限制,而方案四中各工位的物料空間大小和操作者的能量消耗率均在可接受的范圍內(nèi)。 表5 方案四:聯(lián)合優(yōu)化方案結(jié)果分析 本節(jié)對(duì)以上所述四種方案進(jìn)行對(duì)比與分析,各方案的最終結(jié)果如表6所示。 方案三、四考慮了作業(yè)任務(wù)的空間約束對(duì)線平衡優(yōu)化過(guò)程的影響。當(dāng)工站旁可用裝配空間足夠大時(shí),作業(yè)任務(wù)的空間約束對(duì)線平衡優(yōu)化過(guò)程的影響可以忽略不計(jì),采用傳統(tǒng)的線平衡方案更符合實(shí)際情況。然而,在實(shí)際情況中一般線邊面積有限,工站周圍無(wú)法放置過(guò)多的物料,同時(shí)線平衡優(yōu)化的結(jié)果決定了各工站的所需物料的空間大小,一旦所需物料的空間大小超出了最大可用空間大小,會(huì)導(dǎo)致作業(yè)現(xiàn)場(chǎng)混亂、操作者作業(yè)空間不足,并最終影響操作者的作業(yè)效率和產(chǎn)品質(zhì)量。因此,必須在進(jìn)行線平衡優(yōu)化的過(guò)程中考慮作業(yè)任務(wù)的空間約束對(duì)線平衡優(yōu)化過(guò)程的影響。 方案二、四考慮了作業(yè)任務(wù)的工效學(xué)約束對(duì)線平衡優(yōu)化過(guò)程的影響。在不考慮工效學(xué)約束的情況下,傳統(tǒng)的線平衡優(yōu)化方式有更低的平衡指數(shù),但操作者的平均能量消耗率超出了可接受的工效學(xué)水平。在這種情況下考慮工效學(xué)后,瓶頸工序節(jié)拍時(shí)間均超出了生產(chǎn)節(jié)拍時(shí)間。對(duì)于考慮工效學(xué)約束的線平衡優(yōu)化方式,盡管操作者的平均能量消耗率也超出了可接受的工效學(xué)水平,但瓶頸工序節(jié)拍時(shí)間均小于生產(chǎn)節(jié)拍時(shí)間,并且空間利用率有所提升。因此,必須在進(jìn)行線平衡優(yōu)化的過(guò)程中考慮作業(yè)任務(wù)的工效學(xué)約束對(duì)線平衡優(yōu)化過(guò)程的影響。 相較于方案二、三只考慮了單一因素的影響,方案四同時(shí)考慮了兩種因素對(duì)對(duì)線平衡優(yōu)化過(guò)程的影響,考慮工效學(xué)后的瓶頸工序節(jié)拍時(shí)間均小于生產(chǎn)節(jié)拍時(shí)間,各工站所需物料的空間大小均小于最大可用空間大小,并且最大可用空間大小有所降低,極大地提高了空間利用率。 表6 各方案對(duì)比分析 混合裝配線平衡問(wèn)題中人的因素和裝配空間約束等因素對(duì)整個(gè)裝配系統(tǒng)的生產(chǎn)效率有很大的影響,但目前關(guān)于裝配線平衡問(wèn)題的研究很少有同時(shí)考慮這兩種因素,本研究基于傳統(tǒng)的MALB-P模型,考慮了工效學(xué)約束和空間約束對(duì)裝配線平衡的影響,構(gòu)建了第1類混合裝配線平衡的工效學(xué)和裝配空間的聯(lián)合優(yōu)化模型,利用遺傳算法驗(yàn)證了模型有效性和實(shí)用性。但該模型沒(méi)有考慮到操作者的姿態(tài)負(fù)荷和腦力負(fù)荷。事實(shí)上,由于操作者的個(gè)體差異,執(zhí)行不同作業(yè)任務(wù)所需時(shí)間存在不同,每個(gè)操作者所能承受的體力和腦力負(fù)荷也存在差異。 未來(lái)的研究可以針對(duì)不同作業(yè)姿勢(shì)下操作者的能量消耗率的測(cè)量、作業(yè)負(fù)荷腦力負(fù)荷的測(cè)量以及工作環(huán)境負(fù)荷評(píng)估等方面進(jìn)行更深入的研究,以提高操作者的工作滿意度和整個(gè)制造系統(tǒng)的效率。同時(shí),考慮到裝配空間限制和物料的配送與運(yùn)輸策略等因素的影響,使研究過(guò)程能夠更加契合實(shí)際生產(chǎn)情況,研究成果能能更好的運(yùn)用在實(shí)際生產(chǎn)中。4.2 譯碼

4.3 交叉與變異




4.4 構(gòu)造適應(yīng)度函數(shù)
4.5 選擇操作
5 算例分析



6 討論

7 總結(jié)
猜你喜歡
小主人報(bào)(2022年1期)2022-08-10 08:28:44
新作文·小學(xué)低年級(jí)版(2021年9期)2021-11-27 07:57:46
學(xué)生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學(xué)版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學(xué)版(2020年7期)2020-01-02 10:10:44
趣味(數(shù)學(xué))(2018年12期)2018-12-29 11:24:10
小學(xué)生作文(中高年級(jí)適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
