基于2D激光位移傳感器的軌底坡動態檢測系統研究
2019-03-20 12:59:56林建輝熊仕勇
鐵道標準設計 2019年4期
夏 銀,林建輝,王 鋒,熊仕勇
(1.西南交通大學牽引動力國家重點實驗室,成都 610031; 2.西南交通大學機械工程學院,成都 610031)
為使輪軌受力線通過鋼軌中軸傳至軌道基礎,鋼軌鋪設需要向內傾斜,導致軌底面與地平面形成一定的橫向坡度,即為軌底坡。軌底坡設置適當,可以提高鋼軌的橫向穩定性,減少輪軌接觸疲勞損傷,提高輪軌使用壽命,使機車獲得最佳的運行狀態與效率,還間接減少鋼軌磨耗而生的鐵屑,使軌道結構整潔,減少雜散電流,降低養護維修費用[1-2]。
隨著城市軌道交通的發展,運營線路越來越長。在鐵路線路養護和維修中,發現一些線路存在由于軌底坡設置不合理致使輪對與鋼軌磨耗嚴重的情況,而許多鐵路運營單位還局限于通過人工靜態檢測,一是通過觀察鋼軌頂面的亮光帶偏離鋼軌中軸的程度,另一是通過觀察軌頂垂直磨耗是否均勻,這兩種檢測方法不僅效率低下,而且精確度難以保證,無法滿足日常檢測需求,因此實現軌底坡動態檢測是鐵路線路養護和維修的發展趨勢。
隨著激光技術與光電檢測技術的發展,2D廣泛地被應用于鐵路數字化檢測[3]。2D相比CCD照相檢測法,環境抗干擾能力強,檢測精度和可靠性高,能顯著提高檢測效率。
針對軌底坡檢測現狀,結合數字2D的特點,提出一種基于2D和Cortex-M4處理器,并結合RT-Thread實時操作系統的非接觸式軌底坡動態檢測系統。本文通過建立雙2D的空間姿態關系模型,利用鋼軌輪廓上特征點推導軌底坡計算公式。考慮車體振動姿態對軌底坡計算結果的影響,通過利用基于Kalman濾波算法多傳感器的狀態空間模型對軌底坡計算結果進行補償。最后在地鐵線路上進行試驗,驗證了該軌底坡動態檢測系統的可行性。
1 檢測原理與系統設計
1.1 基于2D的鋼軌廓形檢測原理
2D激光位移傳感器由激光發生器、二維CMOS線陣、光學透鏡、信號處理器與數據傳輸模塊組成[4]。2D是基于光學三角測量原理[5],如圖1所示,激光發生器發射線性梯形激光切面,線性激光投射在鋼軌上并形成鋼軌輪廓線,與激光扇面成一定夾角安裝的光學器件感知到反射光線并將其投射到CMOS線陣,最終得到鋼軌輪廓上若干個輪廓測點數據。這些測點數據經過傳感器內部的信號處理器圖像處理、輪廓提取等,最終以數據流的形式通過以太網將輪廓測點數據傳輸至工控機。
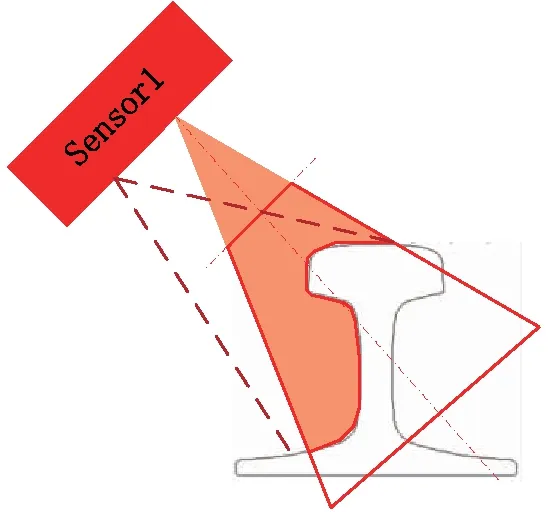
圖1 2D激光位移傳感器工作示意
1.2 檢測系統設計
基于2D的軌底坡動態檢測系統由4個2D、1個陀螺儀、1個傾角傳感器、檢測梁、交換機、工控機、綜合板、電子標簽、RFID天線、RFID讀寫器和速度編碼器組成,檢測梁上傳感器安裝位置如圖2所示。
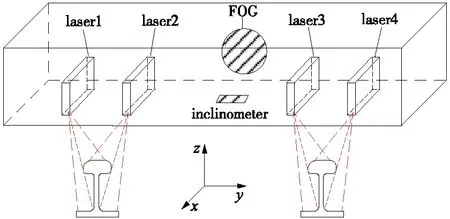
圖2 傳感器安裝位置示意
為獲得整個鋼軌全截面的輪廓數據,檢測梁一端2個2D安裝角度需滿足能夠同時對軌頂、側面和軌腰進行測量,為避免陽光等干擾,在2D梯形激光切面外圍安裝遮光板。由于動態檢測下,軌道不平順激勵影響會引起檢測梁左右搖擺、上下沉浮、前后伸縮、側滾、點頭與搖頭6個方向自由度運動,而在上述6個自由度中,由于2D的梯形激光切面與列車運行方向垂直,檢測梁側滾運動會直接影響軌底坡的測量精度,因此整套系統中添加了由陀螺儀和傾角傳感器組成的測量補償子系統。傾角傳感器測量側滾角低頻分量,軌底坡檢測系統中傾角傳感器選用單軸力平衡式伺服傾角傳感器,基于電解質原理和電容原理的傾角傳感器相比,單軸力平衡式伺服傾角傳感器在非線性、重復性、遲滯、溫度飄移、抗沖擊振動等性能上更優越[6-7]。陀螺儀適用于動態測量,主要測量側滾角高頻分量,軌底坡檢測系統中陀螺儀選用光纖陀螺儀[8],相比于機械式陀螺儀,光纖陀螺儀耐沖擊、壽命長、精度高。
除上述傳感器,軌底坡動態檢測系統還包括速度編碼器、RFID讀寫器、RFID天線、綜合板等器件,整體系統架構如圖3所示。
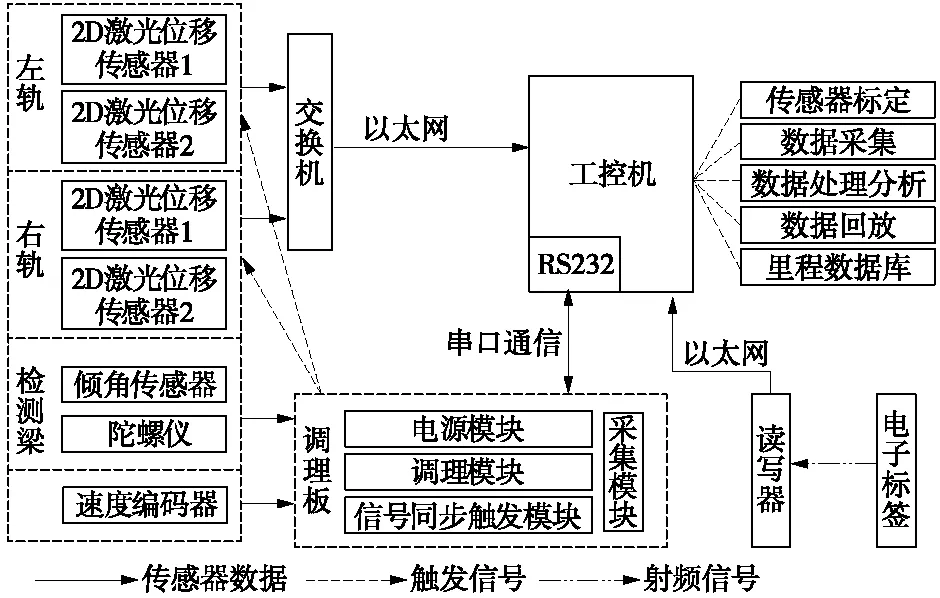
圖3 軌底坡測量系統原理框圖
軌底坡檢測系統選用增量式旋轉光電編碼器,編碼器每轉輸出200個方波脈沖,根據公式(1),綜合板統計編碼器輸出脈沖數,等距觸發2D,利用編碼器A、B兩相輸出功能,還可以計算出列車運行的方向和車速。為修正里程和定位超限點,電子標簽需按照實際線路公里標鋪設,安裝在檢測梁底部的RFID天線識別定位電子標簽,RFID讀寫器將公里標信息通過以太網傳輸至工控機。
(1)
式中,N為計數脈沖數;L為采樣間距;D為檢測車車輪直徑。
從擴展性、重用性、成本方面考慮,軌底坡檢測系統硬件采用模塊化的設計思想,綜合板由核心板、擴展板、電源板與信息顯示板4部分組成,硬件結構見圖4。
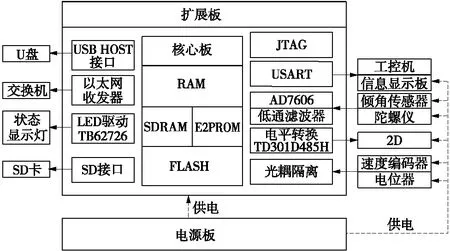
圖4 軌底坡檢測系統硬件結構
核心板選用帶有FPU的ARM Cortex-M4 32位MCU內核的STM32F407ZGT6,16×512K高速SRAM芯片IS61WV51216,容量64G的NAND FLASH芯片MT29F64G08CBABAWP和容量512K的E2PROM芯片AT24C512C,處理器ARM通過FSMC地址訪問SRAM并申請內存緩存空間,FALSH存儲傾角傳感器和陀螺儀的自檢故障數據和濾波數據,E2PROM存儲設備編號、軟件版本號等系統參數。擴展板上集成了JTAG調試模塊、與工控機、信息顯示板串口通信模塊,系統狀態、超限狀態顯示燈的驅動模塊,數據傳輸的USB接口、SD卡接口與以太網模塊,觸發2D的電平轉換模塊,速度編碼器和電位器信號接收的光耦隔離模塊,運放AD8031構成的二階巴特沃斯低通濾波電路以及8通道、16位逐次逼近型AD7606數采模塊。電源板為2D等傳感器、擴展板、信息顯示板供電,電源板由隔離電源模塊、繼電器、電源狀態指示燈組成。信息顯示板用于顯示系統工作狀態,線路超限信息、檢測車運行速度與里程數,信息顯示板與擴展板通過串口通信。
檢測系統的硬件平臺采用小型、實時、可剪裁的RT-Thread操作系統,系統上電后進行操作系統初始化(時鐘、I/O口、RTC、線程、硬件設備等),網絡配置等系統配置、傳感器自檢,串口監視線程根據通信協議,實時與上位機通信,數據采集線程實時儲存封裝傳感器數據,以太網收發線程則是將傳感器數據發送至上位機。通信協議里包含輪徑標定命令,仿真實驗命令和正式試驗命令,輪徑標定是在檢測前標定檢測車車輪周長;仿真實驗是為便于調試,通過電位器電阻變化模擬機車運行速度,靜態測試傳感器和軟件;正式試驗是指檢測車在試驗線路正常檢測。串口監視線程根據通信協議的操作流程如圖5所示。
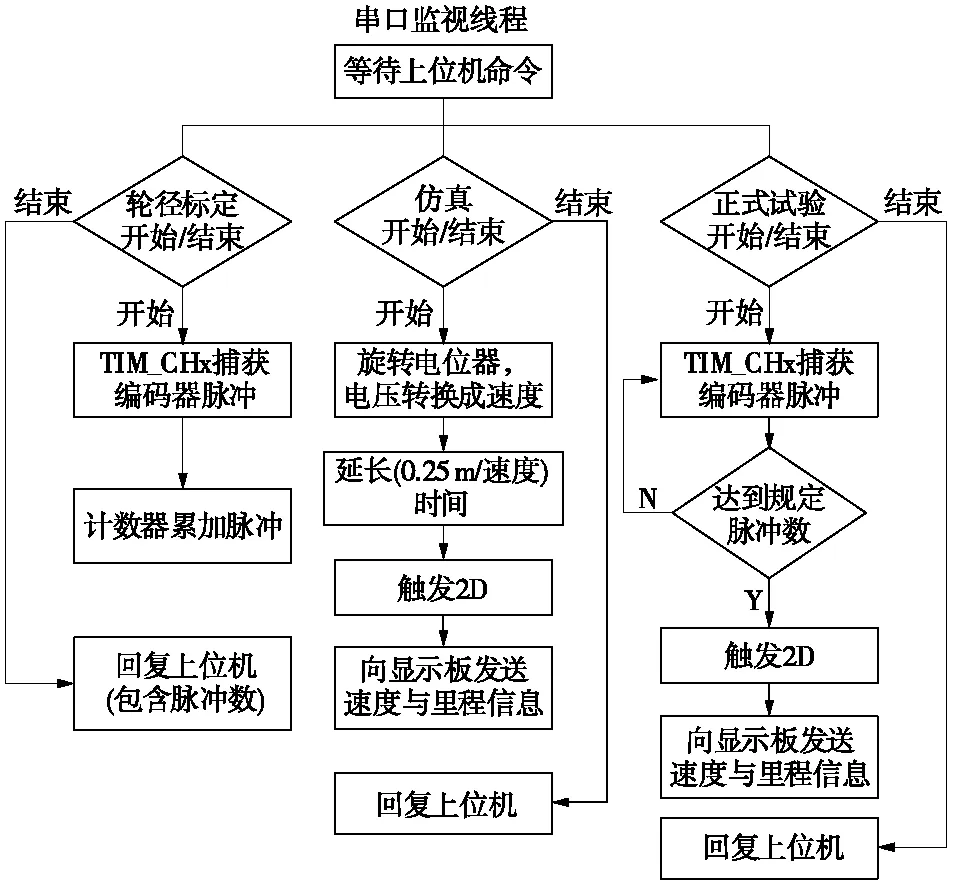
圖5 串口通信工作流程
2 軌底坡計算
2.1 雙2D空間姿態標定模型
以測量左軌軌底坡為例,2D的空間姿態標定[9-11]是指建立鋼軌兩側傳感器的空間幾何關系。
如圖6所示,2D傳感器坐標系分別為oe1xe1ye1ze1和oe2xe2ye2ze2,R、T分別為Sensor2的坐標系oe2xe2ye2ze2到Sensor1的坐標系oe1xe1ye1ze1的旋轉矩陣和平移向量,理想情況下,假設在Sensor1和Sensor2可視范圍內任意一點坐標為(xw,yw,zw),該坐標在Sensor1坐標系中對應點坐標為(xe2,ye1),在Sensor2坐標系中對應坐標為(xe2,ye2)。由于2D安裝在同一平面,Sensor1與Sensor2傳感器坐標系在同一空間平面,于是存在如下關系
根據標定原理與投射定理[12-13]:
(2)

圖6 2D激光位移傳感器坐標示意
2.2 軌底坡計算方法
首先,在靜態調試中,在軌底坡為零的軌道上放置一塊貼有足夠多吸光紙的反光板(標定尺),標定操作[14-16]如圖7所示。標定會得到若干個間斷的、基于2D自身坐標系的標定數據對,通過這些數據對可以求出參數(r1,r2,…,ty),并利用最小二乘法擬合得到水平直線在Sensor1傳感器坐標系中的斜度值,該值會作為以后計算的基準值k0。
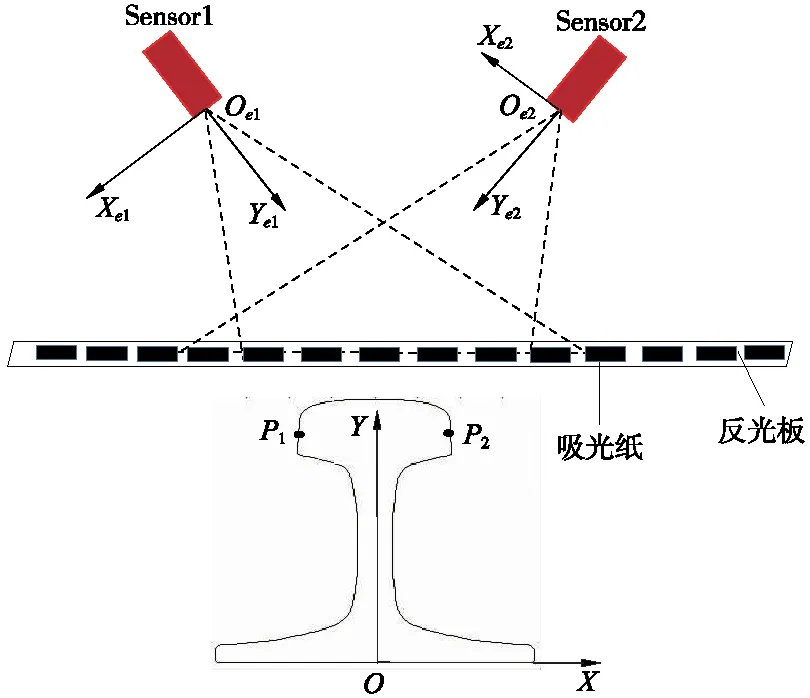
圖7 2D激光位移傳感器標定操作



(3)
2.3 基于Kalman濾波數據的坡度角修正
動態檢測過程中,為保證坡度角的精度,還必須考慮車體的振動[17-18]。車體側滾運動是影響軌底坡角度測量的直接因素,因此需要陀螺儀和傾角傳感器補償。陀螺儀測量側滾角高頻成分,傾角傳感器測量側滾角低頻成分,結合補償角度φ,實際軌底坡真實值為
(4)
利用卡爾曼濾波數據[19-21]建立陀螺儀與傾角傳感器的數據模型,實時跟蹤軌檢梁的振動狀態。
狀態轉移模型如下
(5)

α∈[0,1];nωk為陀螺儀狀態轉移噪聲,nθk為傾角傳感器狀態轉移噪聲。
由于陀螺儀實際測的是車體角速度,欲得到實際角度值,需要通過積分,因此建立如下空間模型
(6)
若nωk,nθk,ωωk,ωθk是相互獨立的零均值高斯白噪聲,它們的方差對應為Qnω,Qnθ,Qωω,Qωθ,x(0)=0。則系統驅動白噪聲序列Nk=[0nωk0nθk]T和系統觀測噪聲序列Nk=[ωωkωθk]T滿足
其中協方差矩陣
初始條件x-1(0|-1)=0、P(0|-1)=0,狀態x(k)的估計為x(k+1|k),則第k次迭代中狀態協方差信息更新P(k+1|k),為下次迭代用。
e(k)=Z(k)-Hx(k|k-1)
(7)
Re(k)=HP(k|k-1)HT+Rk
(8)
Kp(k)=(FP(k|k-1)FT+QkHTRe(k)-1)
(9)
x(k+1|k)=Fx(k|k-1)+KP(k)e(k)
(10)
P(k+1|k)=
(FP(k|k-1)FT+Qk)(I-Kp(k)H)
(11)
3 試驗驗證
本系統安裝在GJ-4型軌道檢測車上,傾角傳感器、陀螺儀、天線與電子標簽讀寫器安裝如圖8(a)所示,2D安裝位置如圖8(b)所示。傾角傳感器選用LCF-100,測量范圍為±14.5°,滿量程輸出為±5 V; 陀螺儀選用VG035P,測量精度為20 mV/deg/s,最大測量范圍為60 deg/s; 2D選用ELAG定制2D,測量范圍為350~650 mm,最高采樣頻率為200 Hz。試驗線路為地鐵線路,根據地鐵線路工務維修規則,該段設置的軌底坡為1/40,坡度角計算約為0.025 0 rad。
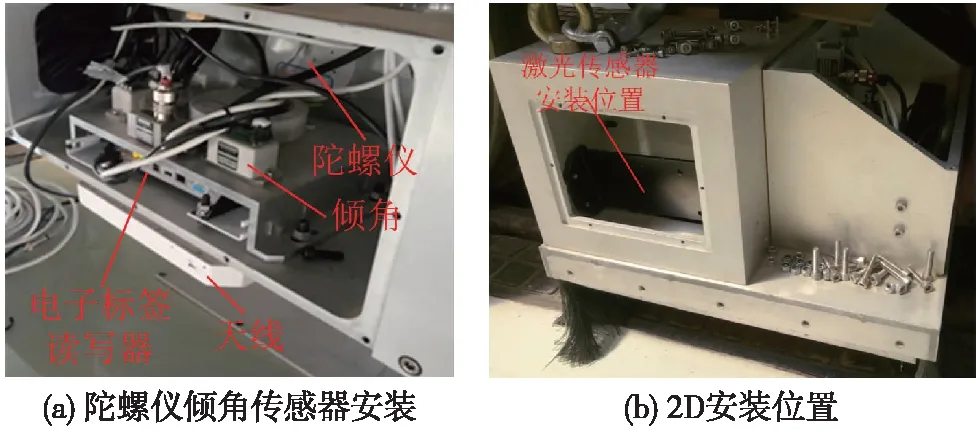
圖8 檢測梁實物圖
以左股鋼軌(外軌)為例,首先進行雙2D空間姿態標定操作,標定會得到水平直線(標定尺)在Sensor1坐標中的斜率值,并以此作為軌底角計算的基準值。正式試驗中,2D等距提取實際線路鋼軌的全軌廓數據,剔除陽光等外界因素產生的干擾數據后,提取的全軌廓數據經過圖像處理算法,與標準鋼軌輪廓匹配,匹配結果如圖9所示。
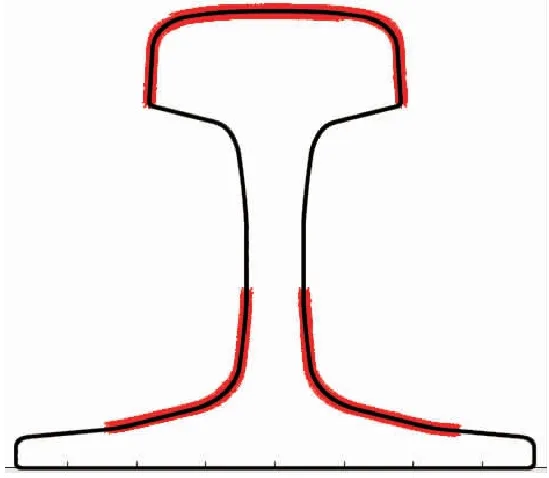
圖9 左軌軌形匹配
尋找左股鋼軌左右兩側的對稱點,通過軌底坡計算公式即式(3)和Kalman濾波即式(4),可獲得軌底坡計算值大小,最終與人工復核值比較。其中傾角傳感器的原始數據如圖10所示,陀螺儀的原始數據如圖11所示,Kalman濾波補償前后的數據如圖12、圖13所示。
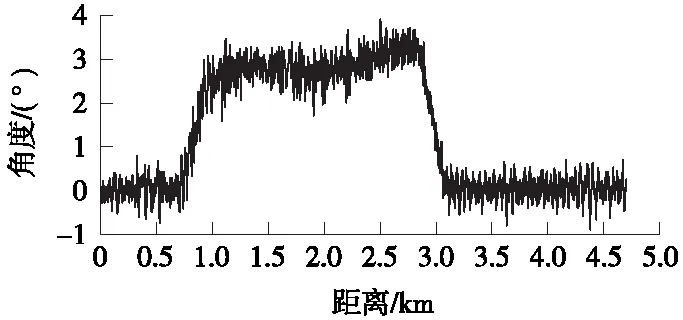
圖10 傾角傳感器原始數據
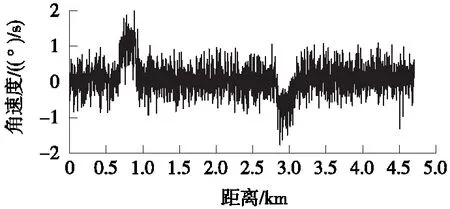
圖11 陀螺儀原始數據
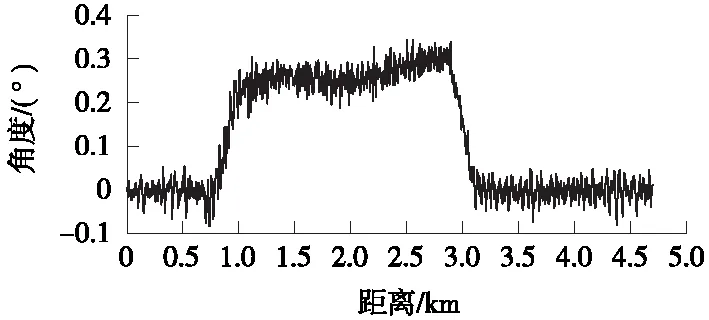
圖12 左軌軌底坡計算補償前結果
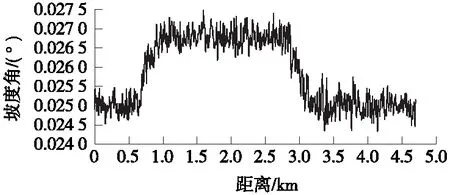
圖13 左軌軌底坡計算補償后結果
誤差分析:2D本身存在一定的測量精度,陀螺儀和傾角傳感器本身存在檢測誤差和因環境變化產生的零漂;2D、陀螺儀與傾角傳感器標定存在誤差,傾角傳感器與陀螺儀受自身沉浮、側滾也會產生誤差;實際安裝中,傳感器與檢測梁、檢測梁與車體轉向架非剛性連接也是誤差來源。從圖13與表1的結果可知,本文軌底坡檢測系統應用于地鐵線路試驗,能夠反映線路軌底坡的變化趨勢,檢測結果與人工復核值基本一致,具有一定精度。該系統可以集成于軌道檢測系統,對軌道狀態實施動態檢測,對指導現場養護與維修工作,不斷保持和提高線路設備的質量具有十分重要的意義。
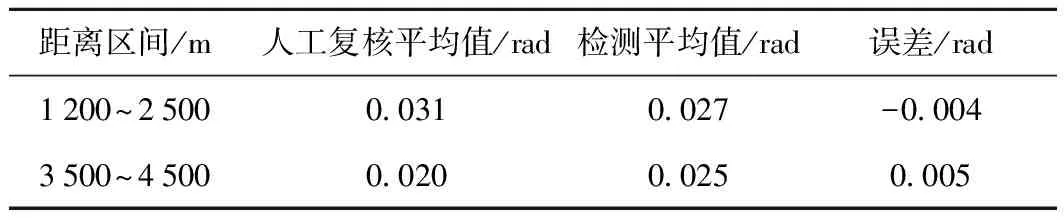
表1 左軌軌底坡結果統計
注:人工復核平均值是在檢測區間1 200~2 500區間抽取3個點,在區間3 500~4 500抽取4個點,測量軌底坡值并求均值。
4 結論
針對軌底坡靜態檢測的不足,設計了一套基于2D的軌底坡動態測量系統。該測量系統采用雙2D獲得鋼軌輪廓坐標數據,利用雙2D的空間姿態標定模型計算軌底坡。該測量系統還考慮到,在動態檢測過程中車體側滾對軌底坡計算結果的影響,應用Kalman濾波算法動態補償修正軌底坡結果的方法。在地鐵正線試驗中,實測軌底坡數據與人工復核數據吻合度較高,動態反應靈敏,試驗結果驗證了該軌底坡動態檢測系統的可行性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45