先驗有色噪聲補償?shù)目柭鼮V波組合導航算法
2019-03-14 03:37:06劉新學孟少飛劉慶寶
火力與指揮控制 2019年2期
楊 其 ,劉新學 ,孟少飛 ,劉慶寶
(1.火箭軍工程大學初級指揮學院,西安 710025;2.火箭軍工程大學士官學院,山東 青州 262500)
0 引言
飛行器在實際使用工況下,由于受到發(fā)動機振動、氣流擾動等因素的作用,始終處于復雜動態(tài)環(huán)境中,會造成與之相固連的捷聯(lián)慣導誤差模型系數(shù)發(fā)生改變,產(chǎn)生隨機動態(tài)誤差。雖然目前各種研究和試驗均而表明動態(tài)條件下的隨機誤差與靜態(tài)標定環(huán)境下并不吻合[1-2],但目前大多數(shù)飛行器誤差模型仍將其歸入單純的隨機誤差,并未進行來源和成因的分析,也沒有相應標定的方法,一方面原因是因為動態(tài)環(huán)境的復雜性無法精準預測,另一方面原因在于振動對慣導設備帶來的影響缺乏根源性的機理分析。目前對于隨機誤差的研究多集中在導航算法研究上[3-5],利用卡爾曼濾波方法對誤差進行濾波補償可以有效克服慣導系統(tǒng)靜態(tài)誤差模型的局限,提高導航解算的精度。但卡爾曼濾波在驅動參數(shù)設置不科學的前提下,也會存在收斂較慢甚至發(fā)散的可能。本文從慣導安裝的動力學模型出發(fā),利用模態(tài)分析的方法求解動態(tài)誤差的數(shù)字特征,設計考慮有色噪聲補償?shù)脑鰪娍柭鼮V波,并利用算例仿真驗證了方法的可行性。
1 慣導本體動態(tài)響應分析
在忽略慣導本體內部受力變形和儀表級隨機安裝誤差等因素時,即假設本體具有絕對剛度情況下,根據(jù)實際工況假設受到彎扭耦合激勵的擾動,將慣導安裝支架等效為Timoshenko梁,減振系統(tǒng)等效為彈簧(橫向振動)、扭簧(扭轉振動)和阻尼器,慣導本體等效為質量件,系統(tǒng)受到沿Timoshenko梁橫向作用力 p(x,t)和繞剪切中心的扭轉力 q(x,t)的共同作用,且認為梁的剪切中心和截面質心并不重合,兩者之間距離為χα,等效混合系統(tǒng)如圖1所示。
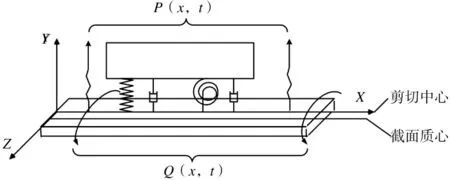
圖1 等效混合系統(tǒng)示意圖
Timoshenko梁是基于初等力學中平截面變形假設的梁模型,即假設初始垂直于中性軸的截平面在變形時仍保持垂直,但考慮剪切變形和轉動慣量。借鑒文獻[6-7]中利用哈密頓原理建立的Timoshenko梁運動方程,可得混合系統(tǒng)運動微分方程為:
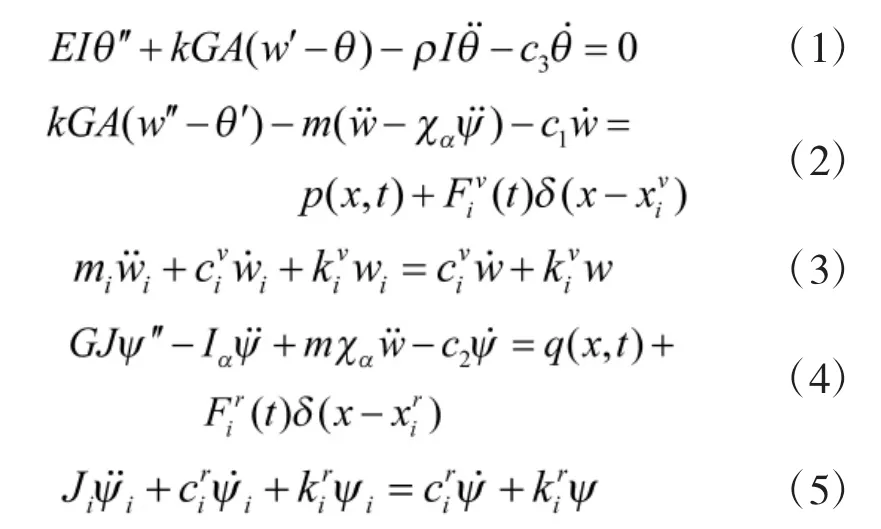
式中,上標(·)表示對時間求導;上標(')表示對位置求導;c1、c2、c3分別表示梁的彎曲振動阻尼、截面旋轉阻尼、扭轉振動阻尼;EI表示梁的彎曲剛度;kGA表示梁的截面旋轉剛度;GJ表示梁的剪切剛度;θ表示橫向振動引起的梁截面旋轉角度;w表示梁的橫向振動位移;ψ表示梁的扭轉振動角度;ρI表示梁的轉動慣量;m表示梁的線密度;Iα表示單位長度梁的慣性矩;mi表示振子質量;wi表示振子橫向振動位移;civ表示振子橫向振動阻尼器的阻尼系數(shù);kiv表示線彈簧剛度系數(shù);xiv表示線彈簧安裝位置;Ji表示振子轉動慣量;ψi表示振子扭轉角度;cir表示振子扭轉振動阻尼器的阻尼系數(shù);kir表示扭簧剛度系數(shù);xir表示扭簧安裝位置;δ()表示 Dirac函數(shù);Fiv、Fir分別表示橫向振動和扭轉運動約束力。
通過觀察等效系統(tǒng)可以發(fā)現(xiàn),彈簧振子與梁僅在彈簧安裝位置發(fā)生相互作用,在方程形式上等效于梁上一點激振力引起的動力學響應,即梁結構振動的Green函數(shù)形式[8-10]。利用彎扭耦合情況下的格林函數(shù)求解并對系統(tǒng)進行復模態(tài)分析,在假設系統(tǒng)阻尼為非經(jīng)典情況下,最終可求得振子橫向振動中響應位移、響應加速度協(xié)方差函數(shù)為:

式中,αn(t)表示系統(tǒng)的模態(tài)響應,p為特征值矩陣,Ai表示梁位移與振子位移關系的矩陣,Y表示分離變量系數(shù)矩陣,表示αn(t)的協(xié)方差函數(shù)矩陣。
同樣獲得振子扭轉響應角度協(xié)方差函數(shù)為

2 先驗有色噪聲的確定
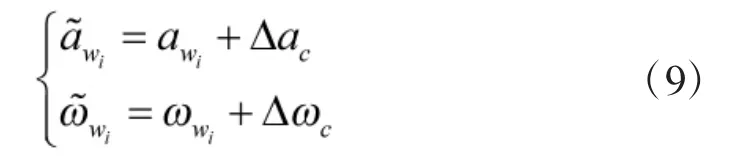
通過混合模型響應分析,可以看到慣導本體在受到外部激勵后,會圍繞靜態(tài)安裝位置產(chǎn)生微小的橫向振動和扭轉振動響應,而響應產(chǎn)生的加速度和角速度也被慣性儀表所敏感進入導航解算,直接產(chǎn)生測量誤差,即

另一方面,當本體質心與飛行器質心不重合,存在安裝桿臂時,當飛行器持續(xù)受到外部激勵時捷聯(lián)慣導本體也將持續(xù)產(chǎn)生動態(tài)響應[11],即本體質心P始終處于變化中,桿臂rp也不再為常量,則桿臂變化造成的加速度誤差應表示為:

式中,ωib為飛行器角速度,Δr為桿臂變化量。
不失一般性地認為桿臂誤差仍圍繞靜態(tài)條件下常值發(fā)生變化,根據(jù)式(6)并結合方差性質,可得桿臂變化量的方差為

在動態(tài)響應條件下外桿臂矢量變化造成加速度誤差的方差為:

式中,C1、C2代表由位置關系決定的常系數(shù)。而同時發(fā)生的繞扭轉振動軸的旋轉運動雖然不會造成桿臂矢量的變化,但旋轉會造成加速度計敏感軸方向發(fā)生變化,如圖2所示。
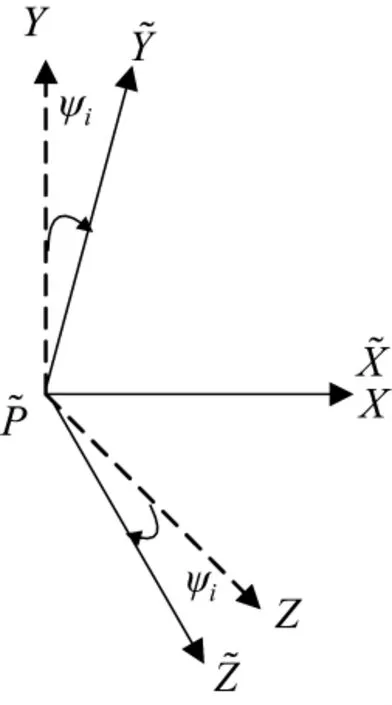
圖2 繞X軸旋轉

式中,Cbt表示由本體坐標系向地理坐標系的轉換矩陣,ab表示本體坐標系中敏感到的加速度,at表示轉換到地理坐標系后的加速度。
而在扭轉響應的情況下,真實本體坐標系中敏感到的加速度轉換到地理坐標系中應表示為:

由此造成的加速度轉換誤差可表示為:

結合式(8)可以求得該誤差的方差Var(Δat)。
顯然,在動態(tài)條件下慣導本體受激響應導致的誤差在誤差模型中被歸入隨機誤差,加速度產(chǎn)生的隨機誤差Δa主要由Δac、Δap和Δat組成。為了使機理更為清晰,本文僅分析了受激響應對加速度造成的影響,按照同樣的方法考慮扭轉振動并結合幾何位置關系,可以得到受激響應對角速度影響,即陀螺的隨機誤差,文中不再贅述。
3 有色噪聲補償?shù)目柭鼮V波
在未獲得先驗有色噪聲信息的情況下,組合導航卡爾曼濾波在使用中對于慣性儀表的隨機誤差一般以白噪聲來描述,以Ψ角誤差方差為基礎推導而來的慣導系統(tǒng)方程可描述為[10]:

式中,x為狀態(tài)變量,F(xiàn)為系統(tǒng)矩陣,可由式(17)求得,u為系統(tǒng)噪聲,即

根據(jù)文獻[4],上述系統(tǒng)為線性時變系統(tǒng),各狀態(tài)均可觀測。
以白噪聲作為隨機誤差,其意義主要在于可以直接作為卡爾曼濾波的系統(tǒng)驅動噪聲,但通過前文分析可以看到在等效Timoshenko梁混合系統(tǒng)情況下,慣性儀表的部分隨機誤差應屬于有色噪聲,應對其進行微分方程描述并導入到慣導系統(tǒng)誤差模型中[13-14]。借鑒文獻[15]系統(tǒng)可描述為:

式中,uc為有色噪聲,ux為等效白噪聲。
以3個軸向上加速度計和陀螺的有色噪聲組成的狀態(tài)空間zi,構造能觀標準型并結合uc的狀態(tài)空間推導,最終可得到考慮有色噪聲的慣導誤差系統(tǒng)方程為:

式中,y為新增系統(tǒng)狀態(tài),F(xiàn)yy、Fxy分別為uc狀態(tài)空間方程的系統(tǒng)矩陣和量測噪聲矩陣,uy為uc狀態(tài)空間的噪聲,具體形式可參見文獻[13]。
新系統(tǒng)噪聲協(xié)方差矩陣可表示為

式中,Qx為未考慮有色噪聲系統(tǒng)的噪聲協(xié)方差矩陣,Qy為uc狀態(tài)空間系統(tǒng)噪聲,可由Timoshenko梁混合系統(tǒng)響應輸出量的數(shù)字特征確定。
4 仿真試驗與分析
結合某型飛行器慣導的具體幾何安裝尺寸和材料參數(shù),取其陀螺儀的常值漂移為0.1(°)/h,隨機漂移為 0.02(°)/h,加速度計初始偏差為 100 ug,隨機偏差為50 ug,考慮由Timoshenko梁混合系統(tǒng)響應得到的有色噪聲生成增強系統(tǒng)方程,對飛行器進行組合制導解算仿真。可以看到增強卡爾曼濾波導航算法穩(wěn)定可行,在一定時長范圍內,各誤差參數(shù)均收斂未發(fā)散。同時將增強卡爾曼濾波與未考慮有色噪聲的卡爾曼濾波算法進行對比,其位置解算誤差對比如圖5所示。
從整體上看,雖然誤差結果相差不大,但增強卡爾曼濾波解算結果精度還是有所提高,同時從圖中可也可以看到在部分時間段內,兩種方法精度優(yōu)劣度出現(xiàn)交錯,一方面原因是因為濾波參數(shù)配置會導致收斂速度有所不同,另一方面原因是Timoshenko梁混合系統(tǒng)模型與實際情況仍有一定的差別,導致系統(tǒng)有色噪聲的估計出現(xiàn)相應的誤差。
5 結論
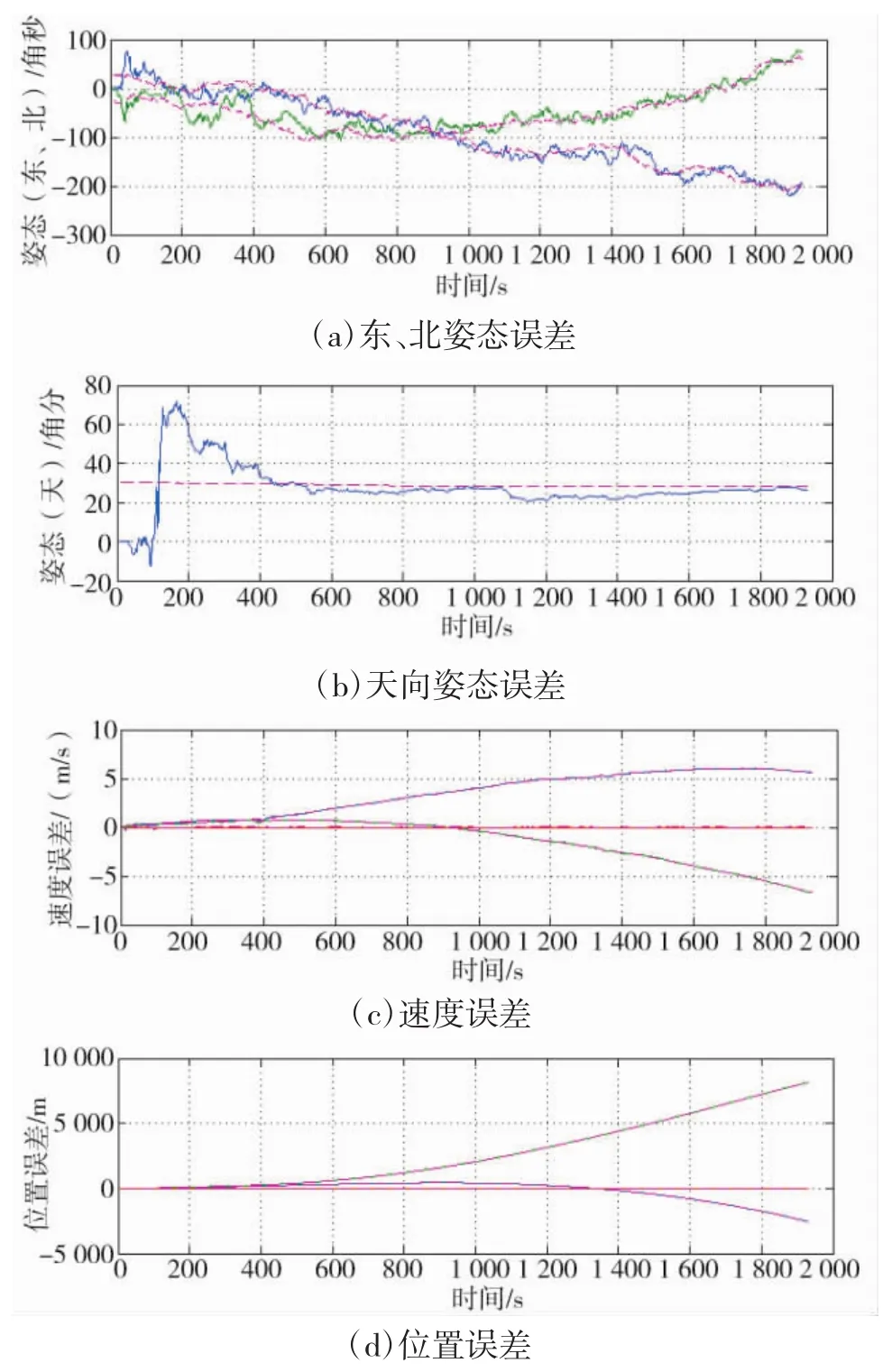
圖3 增強卡爾曼濾波解算誤差
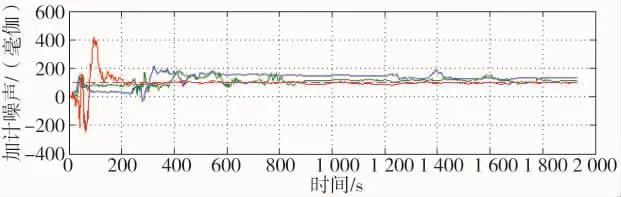
圖4 加速度計噪聲誤差
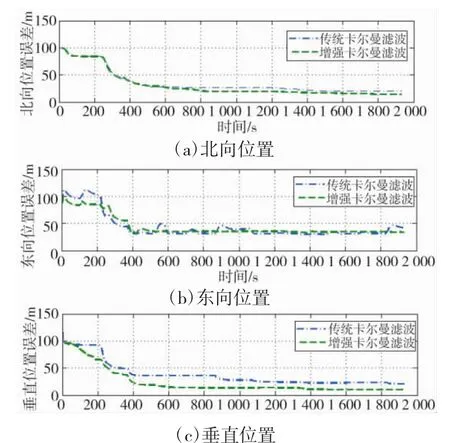
圖5 濾波誤差對比
通過建立Timoshenko梁混合系統(tǒng)模型求解響應輸出,進而分離慣性儀表隨機誤差中的部分有色噪聲,對其進行微分方程描述并導入到慣導系統(tǒng)誤差模型中,利用增強的卡爾曼濾波算法可以提高解算的精確度。如果能獲得接近實際工況條件下多場耦合的外部激勵,對有色噪聲分析將更為準確,同時慣性儀表隨機誤差中的其余組成部分,是值得進一步研究的問題。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(2020年6期)2020-09-10 07:22:44
數(shù)學物理學報(2017年6期)2018-01-22 02:26:40
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
家庭影院技術(2017年9期)2017-09-26 03:41:45
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
