飛行器執行機構故障的魯棒容錯控制器設計*
2019-03-14 03:37:02李清東
火力與指揮控制 2019年2期
王 偉,李清東
(1.湖南財政經濟學院信息技術與管理學院,長沙 410205;2.北京航空航天大學自動化科學與電氣工程學院,北京 100083)
0 引言
當飛行器的某個執行機構出現故障后,具有自修復功能的飛控系統的具體任務依次是[1]:
1)由故障檢測模塊判斷是否發生了故障;
2)自動切換至魯棒性極強的應急控制律,保證飛機短時間內不失控;
3)精確地檢測故障,確定故障的位置、性質和程度,即常規的故障檢測與識別;
4)根據故障檢測診斷的結果,重構控制律,最低要求是保持飛機的穩定,并在此基礎上盡可能地恢復原來的操縱品質。
任務2)是后兩項任務的前提,任務3)直接為任務4)服務。任務2)應急控制律在自修復飛行控制系統中非常重要,起到了承前啟后的過渡作用。其使命就是在故障發生后,故障檢測診斷得出結果前的這段時間內保證飛機穩定。
但傳統的被動容錯控制方法[2-3]和主動容錯控制方法[4-5]都無法作為一種應急控制律直接應用于自修復飛控系統。因為被動容錯控制是按照系統最“糟糕”的情況設計的,以犧牲系統的性能為代價來換取系統對故障的魯棒性和容錯性。而大部分主動容錯控制包括故障檢測診斷和控制重構兩部分,控制重構部分強依賴于故障診斷結果,一旦故障檢測診斷單元出現誤檢、誤判或者有較大的時延,會對控制重構部分起到致命的影響。
近年來,出現了一些可容忍系統不確定性、干擾和故障的強魯棒非線性控制方法,這些方法都不需要精確的故障診斷結果,而是采用補償控制的思路,通過估計/觀測系統的故障和不確定性,在原有控制器信號上加入補償控制信號,以抵消故障對系統的影響。歸納起來,常用的方法有基于神經網絡或模糊等智能控制方法的故障估計和補償[6-8],以及基于非線性觀測器的故障估計和補償[9-16]。但這些方法都是基于主控制器的補償,主控制器和補償控制器沒有完全分開設計,因此,沒有形成統一的控制器的結構。
本文在總結歸納現有的故障補償控制方法的基礎上,首先將文獻[17]中的線性系統的魯棒容錯控制器結構推廣至非線性系統,在此統一的結構下將傳統的控制器設計方法融入其中。提出的非線性魯棒容錯控制器由主控制器和補償控制器組成,兩個控制器可單獨分開設計。當系統無不確定性、干擾或故障時,僅主控制器作用,保證被控系統具有較高的性能,主控制器可以采用任何現有的控制理論設計;當系統具有不確定性、干擾或發生故障后,啟用補償控制器,在保證閉環系統穩定的前提下盡可能地補償故障對系統造成的影響。本文設計了PID主控制器和基于擴張狀態觀測器的補償控制器,針對飛機方向舵卡死故障進行仿真驗證,仿真結果證明了該控制器結構的正確性,同時該控制器增強了飛控系統的魯棒性,可以作為一種有效的應急飛行控制律使用。
1 執行機構故障模型
由于本文設計的應急魯棒容錯控制器適用于精確得到執行機構的故障診斷結果之前,因此,本文的研究內容適用于具有冗余操縱面的先進布局的飛行器。以帶有推力矢量系統[18]的飛機為例建立執行機構故障模型,設計控制器以驗證所提方法的有效性。
當飛機發生執行機構故障(主要包括卡死、損傷和松浮)時,飛機受到的力和力矩都會發生變化,力和力矩的變化會引起飛機狀態的變化。最先變化的是受到力矩控制的飛機的角速度,其次是受到氣動力控制的線速度。但是對比執行機構產生的力矩和力,可以發現,實際上執行機構偏轉主要產生力矩,相比之下,其產生的力很小。如果在故障發生的初始階段,補償控制器能夠提供補償力矩,穩定系統的同時保證系統具有一定的性能,則受到故障執行機構產生的力影響的飛機狀態量變化可以近似忽略。所以本文主要分析飛機角速度回路的動力學模型特性,補償控制器提供的補償力矩直接作用于角速度回路,則其余回路受到的故障影響可近似忽略。
帶有推力矢量的飛機執行機構故障模型可寫為如下仿射非線性系統的形式:


2 控制器設計
2001年,周克敏和任章教授提出一種新型魯棒容錯控制器結構[17],本文將其推廣至非線性飛行控制系統,其結構如圖1所示。

圖1 魯棒容錯控制器
圖1中,y*為給定的參考信號,u1為主控制器輸出信號,uf為故障執行機構的輸入,ucf為補償控制器信號,y為系統輸出,z為非線性狀態觀測器的輸出,ξ為包含故障信息的殘差信號。
當系統無故障時,ξ近似為零,補償控制器ucf近似為零,即不啟用推力矢量和不附加副翼偏轉信號,只有主控制器u1起作用。當系統執行機構發生故障時,補償控制器自動啟用,在保證系統穩定的前提下,抵消故障對系統的影響。
2.1 主控制器設計
主控制器可用現有的控制理論設計,主要考慮系統的性能指標。對于飛機,在無執行機構故障情況下,飛機縱向和橫側向幾乎完全解耦,適合采用經典的根軌跡法設計自動駕駛儀的控制律,本文分別設計了縱向高度控制回路PID控制律,橫側向傾斜姿態控制回路PID控制律。
2.2 基于擴張狀態觀測器的補償控制器設計
非線性擴張狀態觀測器(Nonlinear Extended State Observer,簡稱 NESO)[19-20]是一種適用于仿射非線性系統的,基于輸出誤差的非光滑連續校正思想的一種非線性觀測器,它不僅能觀測系統的狀態,還能通過擴張系統狀態,觀測系統的未知輸入干擾,即故障函數[20-21]。
假設非線性系統如下:
其中,f(x)和g(x)為已知的系統函數,u為控制輸入,w(t)為未知干擾。
上述系統可以擴張為:

w(t)為擴張的系統狀態x2(t),w(t)及其倒數-v(t)皆是未知的。式(3)相應的觀測器為:

式(4)中
0<α<1,δ為原點附近的用來限制增益的小數。
式(1)包含 p,q,r 3 個角速度變量,以一個回路為例設計補償控制器。令 w(t)=g(x)uf,式(1)的一個回路可以改為下式:


則補償控制器可以完全補償故障輸入對系統的影響,因此,補償控制器的輸出為:

利用3個NESO分別估計故障函數,可以得到3組補償控制信號,即附加的副翼偏轉信號和推力矢量噴管偏轉信號。
3 仿真驗證
仿真的初始條件[20]為:飛行速度264 m/s,高度5 000 m的水平平飛狀態。飛機以預定的滾轉角φc=15°定高盤旋飛行,1 s后發生方向舵卡死7°故障,仿真結果如圖2所示。
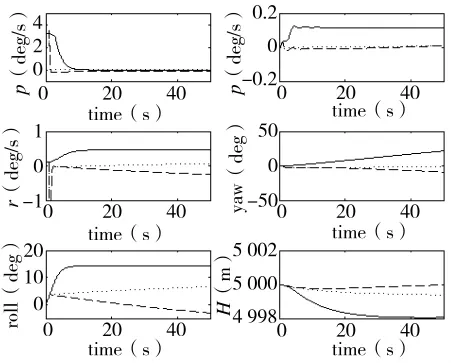
圖2 方向舵卡死7°時,飛機狀態響應
圖2中p,q,r分別表示飛機的三軸角速度,yaw,roll和H分別表示偏航角,滾轉角和飛行高度。圖2中分別顯示了3種情形下的狀態響應結果,分別為:
1)無故障時,僅主控制器作用下的狀態響應曲線如圖中實線所示,飛機按照指令定高盤旋;
2)發生方向舵卡死7°故障后,僅PID控制作用下,系統的狀態響應曲線如圖2中虛線所示。由圖2可知,如果不及時補償的話,飛機橫側向響應曲線迅速惡化,飛機在短時間內失穩;
3)發生方向舵卡死7°故障后,新型魯棒容錯控制器作用下——主控制器加補償控制律作用下,系統的狀態響應曲線如圖2中點線所示。由圖2可知,滾轉角穩定在10°附近,與正常情況相比系統跟蹤性能有所降低,但是系統仍然保持穩定,達到了魯棒控制的目標,起到了應急控制律的作用。
圖3表示由NESO得到的故障估計值。
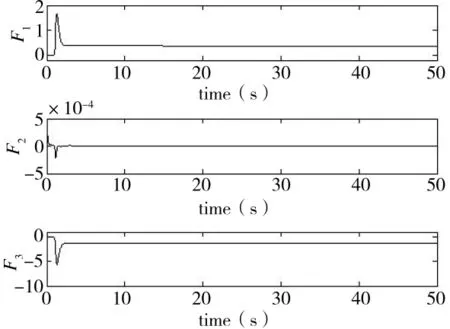
圖3 方向舵卡死7°時故障函數估計值
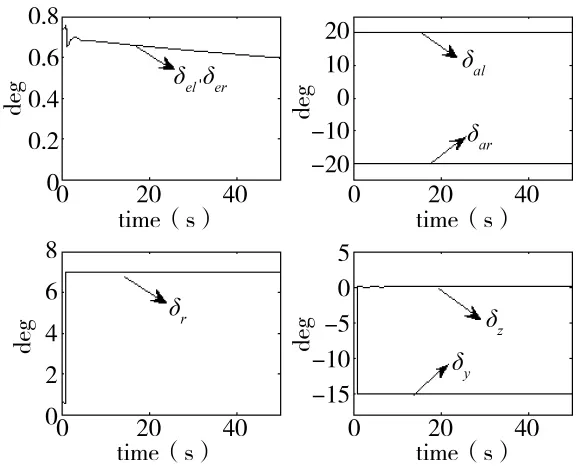
圖4 方向舵卡死7°時,舵面偏轉
圖4為采用新型魯棒容錯控制器時對應的左右升降舵,左右副翼,故障的方向舵以及推力矢量噴管的偏轉角度。
仿真驗證得到,新型魯棒容錯控制律對于一定程度的方向舵故障具有良好的魯棒性。進一步驗證得到,如果方向舵故障程度大于7°,由于推力矢量和附加的副翼信號的補償能力有限,即使加入補償控制信號也無法抑制方向舵卡死對偏航通道產生的巨大影響,系統仍然會發散。事實上,如果系統有足夠的冗余執行機構,該問題完全可以避免。
4 結論
本文提出了一種魯棒容錯控制器結構,針對飛行器執行機構故障,采用兩步法設計實現了該控制器。主控制器以考慮系統的性能為主設計,基于擴張狀態觀測器對故障的估計,設計補償控制器,控制器可以兼顧系統的性能、魯棒性和容錯性。仿真結果表明,該控制器可以作為自修復飛行控制系統的應急控制律使用,同時可以作為下一步精確故障檢測診斷的基礎。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
環球時報(2022-05-30)2022-05-30 15:16:57
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
當代陜西(2019年11期)2019-06-24 03:40:28
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
汽車維護與修理(2016年10期)2016-07-10 08:17:41
