無人機聲學脫靶量測量系統研究
2019-03-14 06:10:34
無人機 2019年12期
中國人民解放軍92419部隊,遼寧省 興城市 125106
早期聲學脫靶量測量系統采用匹配場法,需要經過多次測量獲得目標的形狀系數;同時聲學傳感器測量采用固定判決門限技術,使用中存在一定的局限性。本文通過提高采樣速度,利用多個測量傳感器,測量不同傳感器接收到激波的時間差,解算出目標在測量坐標系的空間位置,進而得到脫靶量。這種方法測量設備結構簡單、不需要測量目標的形狀系數、測量精度高、適應性強,可用于超聲速目標脫靶量測量。
早期聲學脫靶量測量主要通過采用匹配場法,經過多次測量,獲得目標的形狀系數,進而利用經驗公式獲得激波發出點到聲學傳感器的距離,結合目標的速度計算目標的脫靶量。目標形狀系數需要通過多次射擊測試與數據擬合的方法獲得。不同目標的形狀參數不同,需要重新測試和數據擬合。另外,早期測量采用固定判決門限技術,當激波能量弱,背景噪聲高時,對激波信號采集能量弱,同時也受當時的器件等限制,傳感器陣列中經常有個別傳感器處理不出來激波信號,因此在使用中存在一定的局限性。
隨著信號采集技術的進步,高速采樣能力滿足對微秒級信號采樣要求,采用多個測量傳感器,測量不同傳感器接收到激波的時間差,解算出超聲速目標在測量坐標系的空間位置。這種方法的測量設備結構簡單,不需要測量目標的形狀系數,測量精度高,適應性強。
測量原理
當目標以超聲速在大氣中飛行時,在目標的頭尾部形成激波。激波頂點在目標頭部,波前呈一錐面,激波在垂直于波前方向以聲速運動,錐面的半角μ=arcsin(1/Ma)。當激波掃過檢測點時,其空氣壓力迅速從靜態壓力P0增到超壓P0+P1,并隨時間和空間衰減到P0-P2,最后恢復到P0。激波的幅值和兩幅值間的寬度取決于目標的特性、彈速以及彈道到檢測點的法線距離等。
脫靶距離是目標飛經靶標附近時距靶心的最短距離。在圖1中,當目標由B點向C點運動時,目標在B點產生的激波沿波陣面的法線方向傳播到A點。假設A點為脫靶量測量陣列坐標中心,則目標在B點產生的激波傳播到A點的距離為dB,A點至彈道的距離R即為脫靶距離。
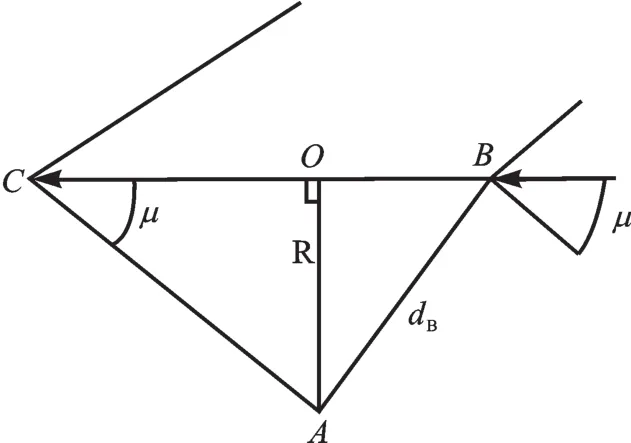
圖1 脫靶距離示意圖

因為sinμ=1/Ma,所以

其中,Ma為目標馬赫數。
那么,激波發出點到過捷徑點O的距離L0為:

目標的矢量脫靶量測量實際上是要測量彈靶遭遇段目標的運動軌跡。首先測量目標相對于脫靶量測量設備在測量坐標系下的運動軌跡,再根據坐標系轉換關系,轉換到靶標航跡坐標系下。
如果在測量坐標系下測量出各個時刻目標的瞬間位置坐標,就可以得到目標運動軌跡。在彈靶遭遇段相對時間很短的條件下,目標的運動規律可以近似為勻速直線運動,其運動軌跡的測量可以轉化為測量坐標系下的直線運動的測量。應用四元陣列聲學傳感器,測量目標超聲速飛行產生的激波信號,進而獲得目標航跡的運動參數。
假設彈靶交會前其運動規律可近似為勻速直線運動。目標運動軌跡與聲學陣列位置關系如圖2所示。在圖中定義的系統測量坐標系中,設目標過靶激波發出點的坐標為(x0,y0,z0),目標運動軌跡與OXY平面的夾角即彈道傾角為β,運動軌跡方向角即彈道偏角為α。顯然,目標的直線運動軌跡可以由這五個參數唯一確定。加上目標運動速度V和目標激波發出點時刻的時間t0,目標在空間運動的整個時間歷程就可以唯一確定。因此,矢量脫靶量測量可以通過設法測量{(x0,y0,z0),α,β,V,t0}七個參數來實現。
測量陣列設置
設置基陣S1~S4,其中心為脫靶量測量中心,以此定義脫靶量測量坐標系為:坐標原點O取為測量基陣S1~S4的幾何中心,OY軸與聲學傳感器S3、S1連線重合,指向S1為正,OX與聲學傳感器S2、S4連線重合,指向S4方向為正。設置副測量基陣S'1~S'4,在基陣S1~S4的基礎上沿著OY軸平移獲得。
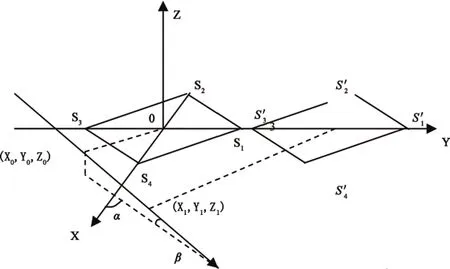
圖2 聲學脫靶量測量原理
激波發出點測量
通過測量目標飛行航路上不同點發出的激波達到基陣上傳感器S1~S4、副基陣傳感器S1'~S4'時間差,獲得不同激波發出點的空間位置(x0,y0,z0)、(x1,y1,z1)。
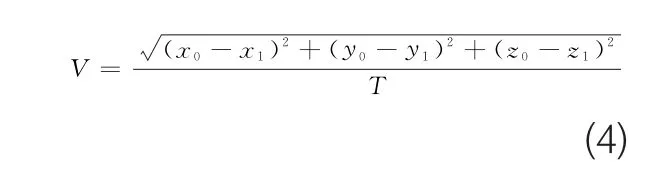
目標運動速度
由于測量基陣和副基陣之間間距較小,可以認為目標是勻速直線運動飛過空間位置(x0,y0,z0)和(x1,y1,z1),時間間隔為T,飛行速度V為:
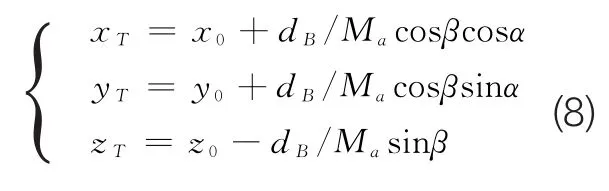
目標運動姿態角
為獲得目標在過測量基陣捷徑點時的坐標,需要獲得目標運動軌跡與OXY平面的夾角以及運動軌跡方向角。
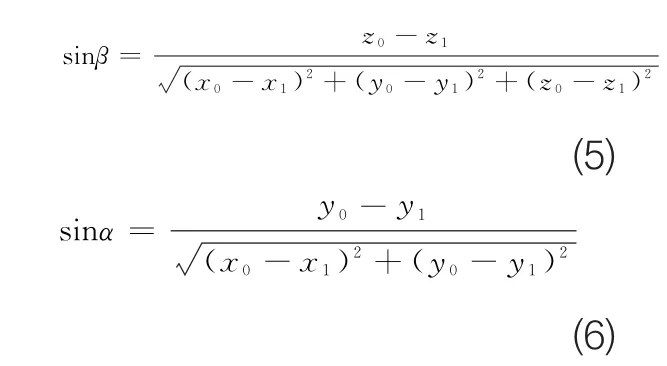
目標過靶點的運動軌跡
設激波發出點的空間位置(x0,y0,z0),則目標繼續飛行的任意時刻t的位置坐標為:
脫靶時刻位置為:
國內外發展現狀和趨勢
2000年以后,國內多所大學先后開展聲學脫靶量測量研究,采用測量激波信號經過不同傳感器時產生的時間差,并應用現代信號處理技術,進行脫靶量測量,經過仿真實驗和實際應用,均取得滿意效果。
美國主要用于測量坦克射擊精度測量的脫靶量測量系統(ROUND DISCRIMIATION SYSTEM, RDS)等已經在陸軍靶場得到廣泛應用,其聲學傳感器陣列如圖3所示。

圖3 聲學傳感器陣列圖
國外研制的聲學脫靶量測量設備,不但可以測量導彈脫靶量,同時還可以測量炮彈脫靶量、步槍射擊報靶等,應用越來越廣泛。對激波信號的適應范圍也越來越寬,信號處理水平也在不斷提高,使脫靶量測量系統正朝著小型化、高精確性、低功耗和高可靠性的方向發展,隨著信號處理、高動態聲壓傳感器技術的不斷發展,聲學脫靶量技術也將結合這些前沿技術獲得進一步的發展,成為一種有效的、好用的測量設備。圖4為國外聲學脫靶量測量系統。
瑞典空靶公司生產了多種型號的聲學脫靶量測量系統,應用于超音速目標的脫靶量測量,如圖5所示。其采用雙陣結構,可以測量炮彈、導彈等超音速目標。測量范圍小于50m,精度1m。當范圍增加時,測量精度為10%脫靶距離。測量數據實時通過超短波系統傳到地面,用于處理。該系統體積小,重量輕,
英國也有Ms410型,如圖6 所示,安裝在MsAT-500靶機上。其測量范圍60m、測量精度1m。
仿真試驗
假設聲源坐標為(距靶心距離分別為R=50、30、15、5m,α=0.5236 rad,β=0.7854 rad)時;采用被動聲脫靶量測量系統模型為四元十字陣模型,仿真過程中長度單位為m、角度單位為rad,構造的四路激波信號,信噪比為10,信號長度為2048,采樣頻率為100KHz,四路仿真信號如圖7所示。
應用上面構造的四路仿真信號,然后結合信號與傳聲器陣列靶心的距離變化情況,應用設計的四元十字陣及其相關算法得到的仿真結果如表1所示。

表1 仿真結果

圖4 國外聲學脫靶量測量系統

圖5 AS-131/12U/Ul/TB聲學脫靶量系統

圖6 Ms410型聲學脫靶量系統安裝結構和地面接收機

圖7 四路仿真信號
根據表1可以看出,脫靶量在50m時最大為0.4351m,在15m時為-0.2628m,在5m時最小為-0.1426m。產生上述誤差的原因主要是時延估計值和實際測量值存在一定的誤差導致的(指的是采樣點數之差不能是理想的整數)。在實際測量過程中由于聲源與實際傳聲器之間的距離,以及聲源到達各個傳聲器的時間差不可能是整數,導致計算結果出現誤差。但是這些誤差是在允許的范圍之內的。
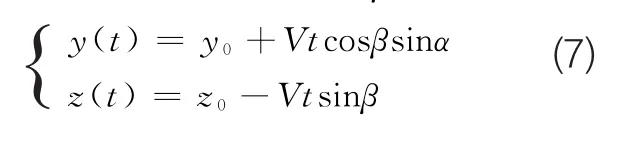
外場試驗
外場試驗中測量得到的波形如圖8所示,測量結果如表2所示。
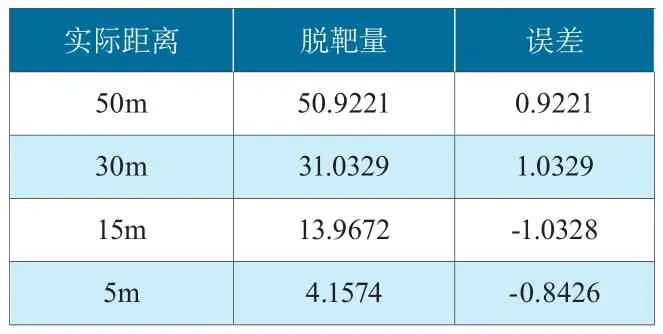
表2 四種距離下測量結果
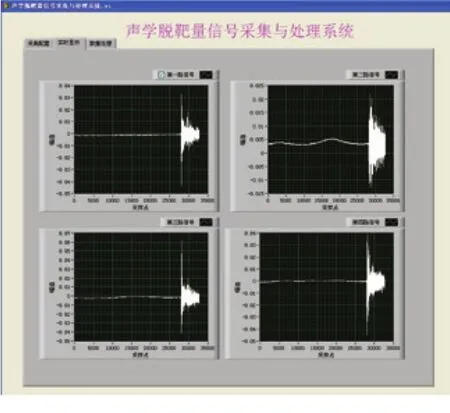
圖8 實時顯示測量波形
根據表2可以看出,脫靶量在30m時最大為1.0329m,在15m時為-1.0328m,在5m時最小為-0.8426m。從上表中可以看出測量結果存在一定誤差。
結論
聲學脫靶量測量系統采用聲學傳感器陣列,測量不同傳感器接收到激波的時間差,解算出目標在測量坐標系的空間位置,進而得到脫靶量。這種方法的測量設備結構簡單,不需要測量目標的形狀系數,測量精度高,適應性強。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00