基于車(chē)載激光雷達(dá)技術(shù)的高速鐵路無(wú)砟軌道設(shè)施調(diào)查方法
2019-03-04 09:59:18
鐵道建筑 2019年2期
(中國(guó)鐵路武漢局集團(tuán)有限公司 武漢高鐵工務(wù)段,湖北 武漢 430071)
截至2016年,我國(guó)鐵路營(yíng)業(yè)里程達(dá)12萬(wàn)km,資產(chǎn)總規(guī)模達(dá)7.25萬(wàn)億元,其中高速鐵路里程超過(guò)2萬(wàn)km[1]。高速鐵路規(guī)模龐大的資產(chǎn)管理成為一項(xiàng)重要工作。鐵路管理部門(mén)對(duì)鐵路設(shè)施的管理提出了信息化和精細(xì)化的要求。由于已經(jīng)投入運(yùn)行的高速鐵路的設(shè)施檔案不完整以及缺乏電子化的數(shù)據(jù),需要重新對(duì)高速鐵路的設(shè)施單元進(jìn)行現(xiàn)場(chǎng)采集。
目前,高速鐵路設(shè)施單元現(xiàn)場(chǎng)調(diào)查主要采用人工方式。該方式面臨著以下困難:首先,運(yùn)營(yíng)中的高速鐵路維修天窗時(shí)間短,有效調(diào)查作業(yè)時(shí)間有限;其次,人工調(diào)查作業(yè)效率極為低下,作業(yè)人員管理培訓(xùn)工作繁瑣且數(shù)據(jù)質(zhì)量難以保證。因此,對(duì)運(yùn)營(yíng)中的大量高速鐵路軌道設(shè)施實(shí)施人工調(diào)查是項(xiàng)難以完成的龐大工程,亟待研究和探索新技術(shù)新方法。
近些年興起的車(chē)載激光雷達(dá)成像技術(shù)利用高速激光雷達(dá)獲取現(xiàn)場(chǎng)三維場(chǎng)景,可以快速獲取高速鐵路軌道的精密三維點(diǎn)云數(shù)據(jù)。點(diǎn)云數(shù)據(jù)不僅包含了軌道各個(gè)設(shè)施單元的空間幾何數(shù)據(jù),還包含了各個(gè)設(shè)施的表面反射率數(shù)據(jù)。通過(guò)對(duì)軌道三維點(diǎn)云數(shù)據(jù)的濾波、分類(lèi)與建模,可以提取軌道各設(shè)施單元的屬性和幾何參數(shù)。因此,車(chē)載激光雷達(dá)技術(shù)可以應(yīng)用于高速鐵路無(wú)砟軌道設(shè)施調(diào)查,采集的精密三維點(diǎn)云數(shù)據(jù)還可以應(yīng)用于軌道的精細(xì)化檢測(cè)和維護(hù)[2-7]。
自2017年初開(kāi)始,武漢鐵路局運(yùn)用車(chē)載激光雷達(dá)技術(shù)在局內(nèi)管轄的無(wú)砟軌道進(jìn)行軌道各設(shè)施單元的調(diào)查。實(shí)踐證明,該方法每1h可以采集5km的軌道點(diǎn)云數(shù)據(jù),是傳統(tǒng)人工調(diào)查效率的20倍以上,幾何測(cè)量精度達(dá)到毫米級(jí),大幅提高了既有線(xiàn)高速鐵路軌道基礎(chǔ)數(shù)據(jù)的采集效率。本文介紹車(chē)載激光雷達(dá)的原理,闡述了其在無(wú)砟軌道設(shè)施調(diào)查方面的應(yīng)用情況。
1 車(chē)載激光雷達(dá)概述
近年來(lái),車(chē)載激光雷達(dá)技術(shù)得到了快速的發(fā)展,并在測(cè)繪、數(shù)字城市、導(dǎo)航地圖生產(chǎn)、礦山測(cè)繪以及公路勘察等領(lǐng)域得到普及應(yīng)用。車(chē)載激光雷達(dá)主要由POS系統(tǒng)(定位定姿系統(tǒng),包括GNSS,IMU,DMI模塊)、激光掃描儀(LiDAR)、線(xiàn)結(jié)構(gòu)激光傳感器等組成。為滿(mǎn)足高速鐵路的測(cè)量與設(shè)施調(diào)查需求,還配置了軌道小車(chē)、供電電源、存儲(chǔ)與控制計(jì)算機(jī)等設(shè)備,系統(tǒng)組成如圖1所示。
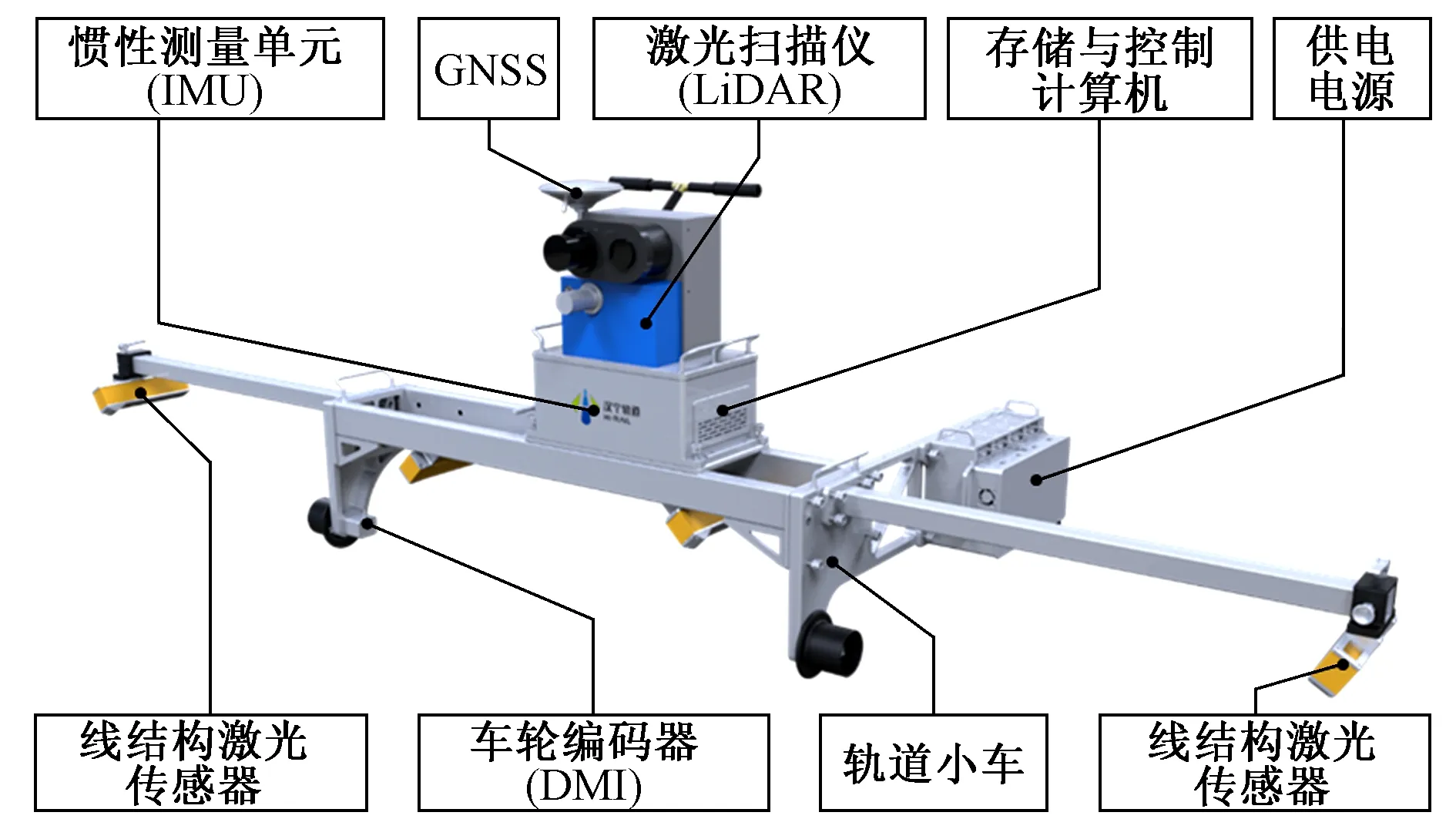
圖1 車(chē)載激光雷達(dá)系統(tǒng)硬件組成

車(chē)載激光雷達(dá)的工作原理如圖2所示。對(duì)于動(dòng)態(tài)定位數(shù)據(jù)、姿態(tài)數(shù)據(jù)以及里程數(shù)據(jù),首先利用擴(kuò)展卡爾曼濾波器將三者進(jìn)行融合,輸入動(dòng)態(tài)環(huán)境下車(chē)載平臺(tái)的高精度位置與姿態(tài)(POS)數(shù)據(jù);然后將POS數(shù)據(jù)與激光掃描儀的數(shù)據(jù)進(jìn)行融合,獲得鐵路沿線(xiàn)地物目標(biāo)的空間三維坐標(biāo)。如圖2所示。
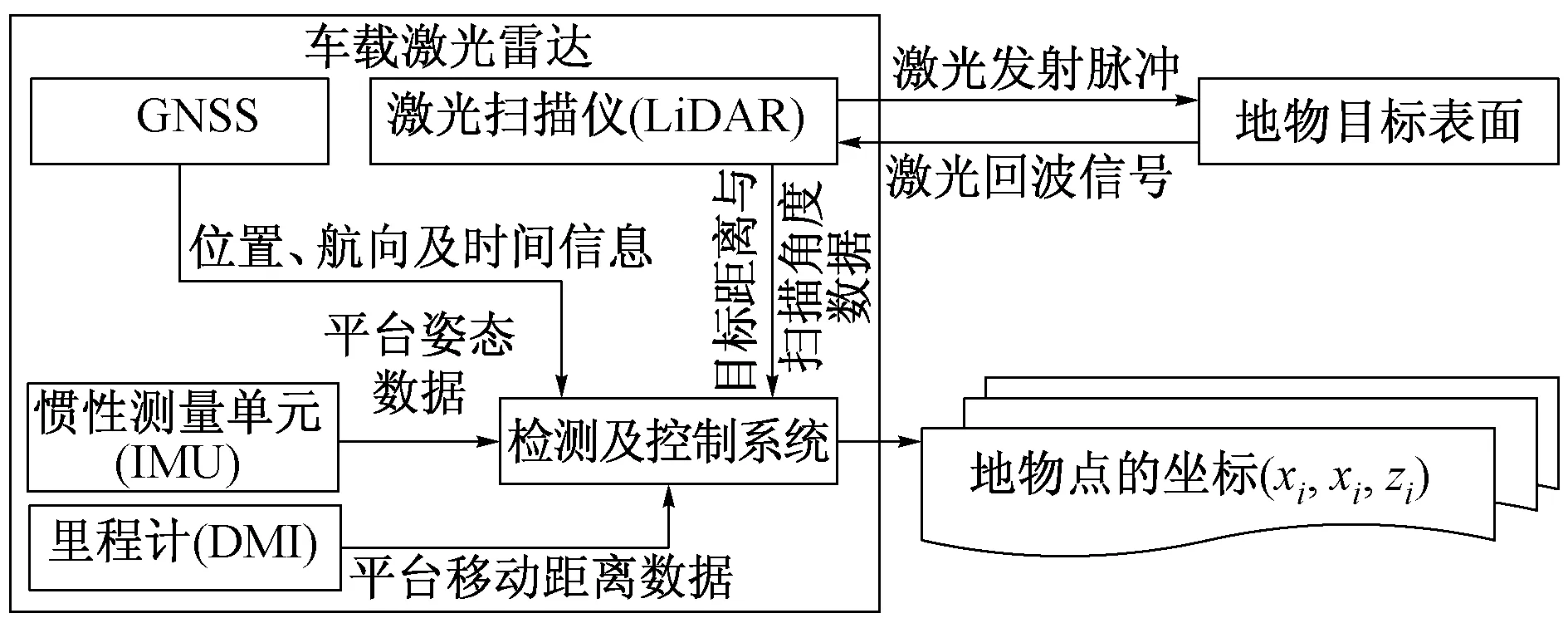
圖2 車(chē)載激光雷達(dá)的工作原理
2 車(chē)載激光雷達(dá)在無(wú)砟軌道設(shè)施調(diào)查中的應(yīng)用方法
依據(jù)《高鐵無(wú)砟軌道線(xiàn)路設(shè)備管理單元及統(tǒng)計(jì)辦法》規(guī)定,按照劃分的CRTSⅠ型、CRTSⅡ型、CRTSⅢ型板式、雙塊式無(wú)砟道床,岔區(qū)埋入式、岔區(qū)板式無(wú)砟軌道等設(shè)備管理單元進(jìn)行調(diào)查,并輸出10種數(shù)據(jù)成果表:正線(xiàn)無(wú)砟軌道表、正線(xiàn)無(wú)砟扣件表、正線(xiàn)側(cè)向擋塊表、端刺端梁表、岔區(qū)無(wú)砟軌道表、岔區(qū)無(wú)砟扣件表、岔區(qū)無(wú)砟側(cè)向擋塊表、站段岔特線(xiàn)無(wú)砟軌道表、站段岔特線(xiàn)無(wú)砟扣件表、站段岔特線(xiàn)側(cè)向擋塊表等。根據(jù)車(chē)載激光雷達(dá)數(shù)據(jù)特點(diǎn),可以通過(guò)對(duì)點(diǎn)云數(shù)據(jù)處理提取各表所需信息。
2.1 無(wú)砟軌道高精度點(diǎn)云數(shù)據(jù)采集與處理流程
基于車(chē)載激光雷達(dá)的無(wú)砟軌道設(shè)施調(diào)查主要包括2個(gè)方面的工作,分別為外業(yè)數(shù)據(jù)采集以及內(nèi)業(yè)數(shù)據(jù)處理2個(gè)過(guò)程,其整體業(yè)務(wù)流程如圖3所示。外業(yè)數(shù)據(jù)采集主要是利用車(chē)載激光雷達(dá)現(xiàn)場(chǎng)采集高速鐵路線(xiàn)路點(diǎn)云數(shù)據(jù);內(nèi)業(yè)數(shù)據(jù)處理主要包括高速鐵路軌道點(diǎn)云數(shù)據(jù)解算以及軌道板信息提取2個(gè)方面。

圖3 無(wú)砟軌道設(shè)施調(diào)查方法的業(yè)務(wù)流程
2.2 高速鐵路軌道點(diǎn)云數(shù)據(jù)解算
高速鐵路軌道點(diǎn)云數(shù)據(jù)解算過(guò)程主要包括車(chē)載激光雷達(dá)系統(tǒng)的位置與姿態(tài)(POS)數(shù)據(jù)解算以及POS數(shù)據(jù)與激光掃描數(shù)據(jù)融合生成點(diǎn)云數(shù)據(jù)。
POS數(shù)據(jù)解算主要采用IE后處理軟件,用于融合處理GNSS基站采集的差分改正數(shù)據(jù)、車(chē)載GNSS定位數(shù)據(jù)、IMU輸出的角速度與加速度數(shù)據(jù)以及DMI輸出的里程與速度數(shù)據(jù),得到車(chē)載激光雷達(dá)動(dòng)態(tài)條件下高精度的位置、速度、姿態(tài)等信息。基于GNSS/IMU/DMI組合的定位定姿方法可以克服隧道、高樓、橋梁等復(fù)雜環(huán)境引起的GNSS衛(wèi)星信號(hào)失鎖或干擾,可以顯著提高定位定姿的精度及可靠性。然后主要利用融合軟件將解算出來(lái)的POS數(shù)據(jù)與激光掃描儀的測(cè)量數(shù)據(jù)融合成點(diǎn)云數(shù)據(jù),該點(diǎn)云數(shù)據(jù)坐標(biāo)基于絕對(duì)位置信息。
2.3 軌道板參數(shù)信息自動(dòng)提取算法
利用車(chē)載激光雷達(dá)采用的激光掃描所特有的數(shù)據(jù)特點(diǎn),設(shè)計(jì)開(kāi)發(fā)了一套軌道板參數(shù)自動(dòng)提取算法。該算法輸入數(shù)據(jù)包括:編碼器數(shù)據(jù)、POS數(shù)據(jù)、軌道板坐標(biāo)信息、軌道點(diǎn)云數(shù)據(jù)等。輸出數(shù)據(jù)包括:軌道板填充層厚度、底層設(shè)備厚度、填充層長(zhǎng)度、底層設(shè)備長(zhǎng)度、接縫寬度、板長(zhǎng)、起始里程、終止里程、板型相關(guān)信息。算法流程如圖4所示。

圖4 軌道板參數(shù)自動(dòng)提取算法流程
上述算法計(jì)算完畢后,得到每個(gè)軌道板的底層設(shè)備厚度、填充層厚度、板塊接縫起始里程、板塊接縫終止里程4個(gè)參數(shù),同時(shí)可以計(jì)算出車(chē)載激光雷達(dá)運(yùn)行方向與內(nèi)業(yè)數(shù)據(jù)處理方向是否一致的信息。
通過(guò)上述參數(shù)可計(jì)算出板長(zhǎng)(非橋上雙塊式的板長(zhǎng)為定值,無(wú)需計(jì)算)、接縫(橋上雙塊式接縫手工量測(cè),無(wú)需計(jì)算)、填充層長(zhǎng)度(雙塊式無(wú)填充層)、底層設(shè)備長(zhǎng)度、板塊起始里程、板塊終止里程6個(gè)參數(shù)。
算法步驟如下:
1)當(dāng)車(chē)載激光雷達(dá)運(yùn)行方向與內(nèi)業(yè)數(shù)據(jù)處理方向一致時(shí):①軌道板的起始里程=前一個(gè)軌道板的接縫終止里程。②軌道板的終止里程=當(dāng)前軌道板的接縫終止里程。③對(duì)于CRTSⅠ型、CRTSⅡ型、CRTSⅢ型軌道板,距離閾值=當(dāng)前軌道板的接縫終止里程-前一個(gè)軌道板的接縫終止里程-35 mm(接縫閾值),計(jì)算距離閾值與各種板型的標(biāo)準(zhǔn)長(zhǎng)度的差值,軌道板長(zhǎng)度=差值最小的板型的標(biāo)準(zhǔn)長(zhǎng)度;軌道板接縫值=當(dāng)前軌道板的接縫終止里程-前一個(gè)軌道板的接縫終止里程-當(dāng)前軌道板長(zhǎng)度。④對(duì)于非橋上雙塊式板型,軌道板接縫由手動(dòng)量測(cè),無(wú)需計(jì)算,其軌道板長(zhǎng)度=當(dāng)前軌道板的接縫終止里程-前一個(gè)軌道板的接縫終止里程-軌道板接縫值。
2)當(dāng)車(chē)載激光雷達(dá)運(yùn)行方向與內(nèi)業(yè)數(shù)據(jù)處理方向不一致時(shí):①軌道板的起始里程=當(dāng)前軌道板的接縫起始里程。②軌道板的終止里程=下一個(gè)軌道板的接縫起始里程。③對(duì)于CRTSⅠ型、CRTSⅡ型、CRTSⅢ 型軌道板,距離閾值=下一個(gè)軌道板的接縫起始里程-當(dāng)前軌道板的接縫起始里程-35 mm(接縫閾值),計(jì)算距離閾值與各種板型的標(biāo)準(zhǔn)長(zhǎng)度的差值,軌道板長(zhǎng)度=差值最小的板型的標(biāo)準(zhǔn)長(zhǎng)度;軌道板接縫值=下一個(gè)軌道板的接縫起始里程-當(dāng)前軌道板的接縫起始里程-當(dāng)前軌道板長(zhǎng)度。④對(duì)于橋上雙塊式板型,軌道板接縫由手動(dòng)量測(cè),無(wú)需計(jì)算,其軌道板長(zhǎng)度=下一個(gè)軌道板的接縫起始里程-當(dāng)前軌道板的接縫起始里程-軌道板接縫值。
3)對(duì)于非橋上雙塊式軌道板,沒(méi)有軌道板接縫,其軌道板長(zhǎng)度為定值 6 500 mm。用戶(hù)需要輸入第1個(gè)軌道板的起始里程或者最后一個(gè)軌道板的終止里程。以此計(jì)算軌道板起始里程以及終止里程。
4)其他參數(shù)值獲取:①軌道板底層設(shè)備長(zhǎng)度=軌道板長(zhǎng)度+軌道板接縫寬度;②軌道板填充層長(zhǎng)度=軌道板長(zhǎng)度+軌道板接縫寬度。
2.4 軌道板自動(dòng)編號(hào)方法
高速鐵路設(shè)備管理規(guī)定軌道板每一組為1個(gè)管理單元,其統(tǒng)計(jì)要求中需要有板順序號(hào),其編號(hào)規(guī)則為按照整公里數(shù)+“-”+序號(hào)(####-###)的格式依次編號(hào),比如里程K1+000的第1塊軌道板編號(hào)為0001-001。按傳統(tǒng)調(diào)查方法對(duì)軌道板進(jìn)行編號(hào)需要耗費(fèi)很大的人力以及時(shí)間,因此該普查軟件中提出一種軌道板自動(dòng)編號(hào)的算法來(lái)對(duì)軌道板自動(dòng)編號(hào)。該算法的前提條件是使用該軟件的軌道板參數(shù)信息自動(dòng)提取算法計(jì)算出每個(gè)軌道板的起始里程和終止里程,其流程見(jiàn)圖5。
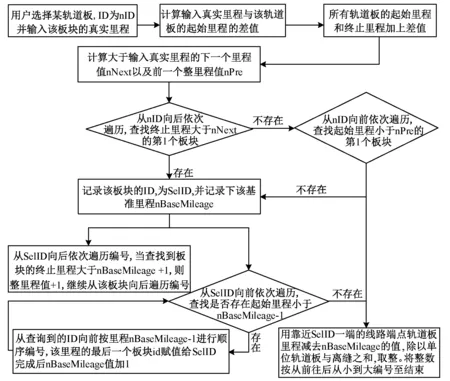
圖5 軌道板自動(dòng)編號(hào)算法流程
3 試驗(yàn)與分析
3.1 試驗(yàn)數(shù)據(jù)來(lái)源
為了能夠驗(yàn)證車(chē)載激光雷達(dá)用于無(wú)砟軌道設(shè)施臺(tái)賬調(diào)查的可行性以及調(diào)查效率,采用rMMS車(chē)載激光雷達(dá)采集了武漢一高速鐵路線(xiàn)路總共200 km左右的高精度點(diǎn)云數(shù)據(jù),包含CRTSⅠ型、CRTSⅡ型和CRTSⅢ型板式無(wú)砟道床,雙塊式無(wú)砟道床、岔區(qū)埋入式以及岔區(qū)板式無(wú)砟軌道類(lèi)型的數(shù)據(jù)。CRTSⅠ型、CRTSⅡ型板式以及雙塊式無(wú)砟軌道采集的點(diǎn)云數(shù)據(jù)如圖6—圖8所示。
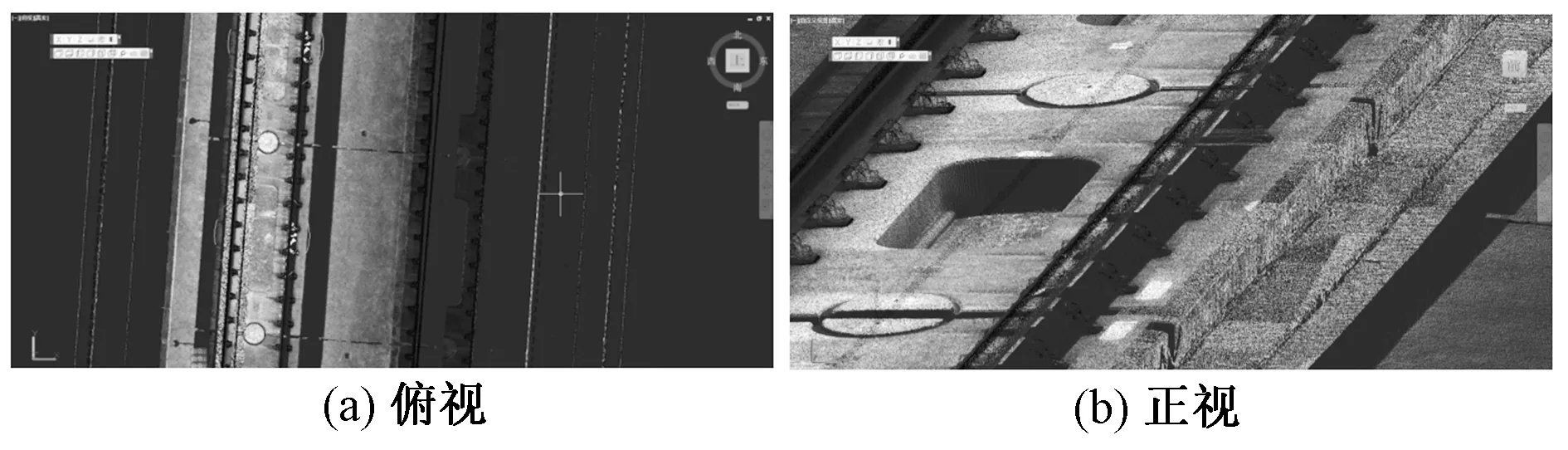
圖6 采集的CRTSⅠ型板點(diǎn)云
3.2 軌道設(shè)施單元提取與管理
內(nèi)業(yè)數(shù)據(jù)處理過(guò)程采用的軟件為自主研發(fā)的高速鐵路無(wú)砟軌道線(xiàn)路設(shè)備普查軟件,通過(guò)該軟件從軌道點(diǎn)云數(shù)據(jù)中提取出軌道板的屬性信息。
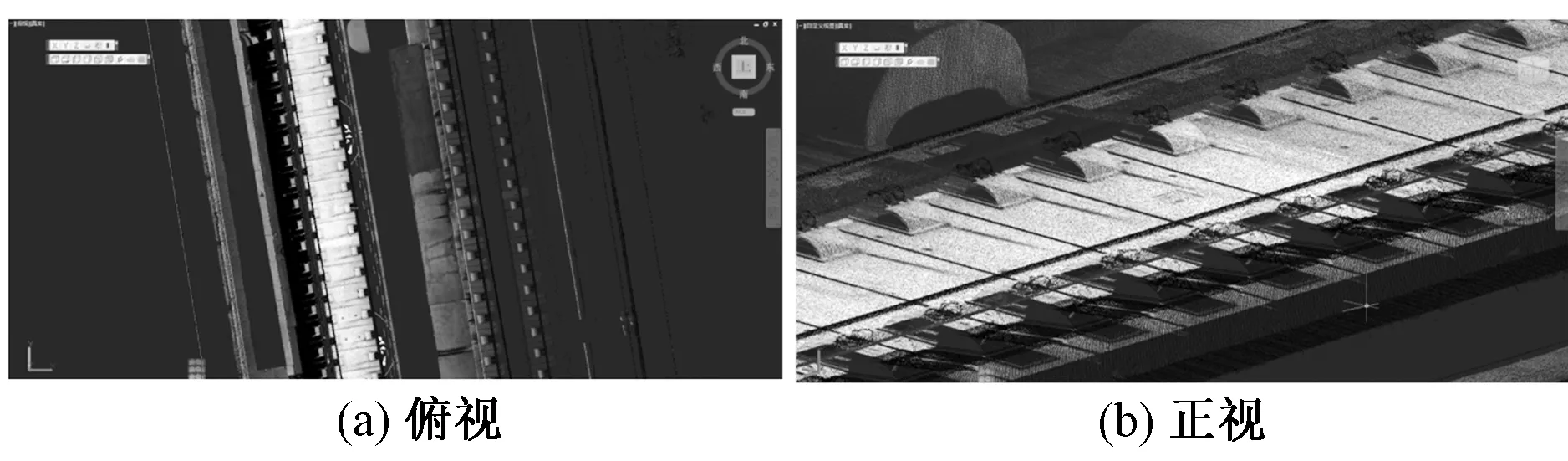
圖7 采集的CRTSⅡ型板點(diǎn)云
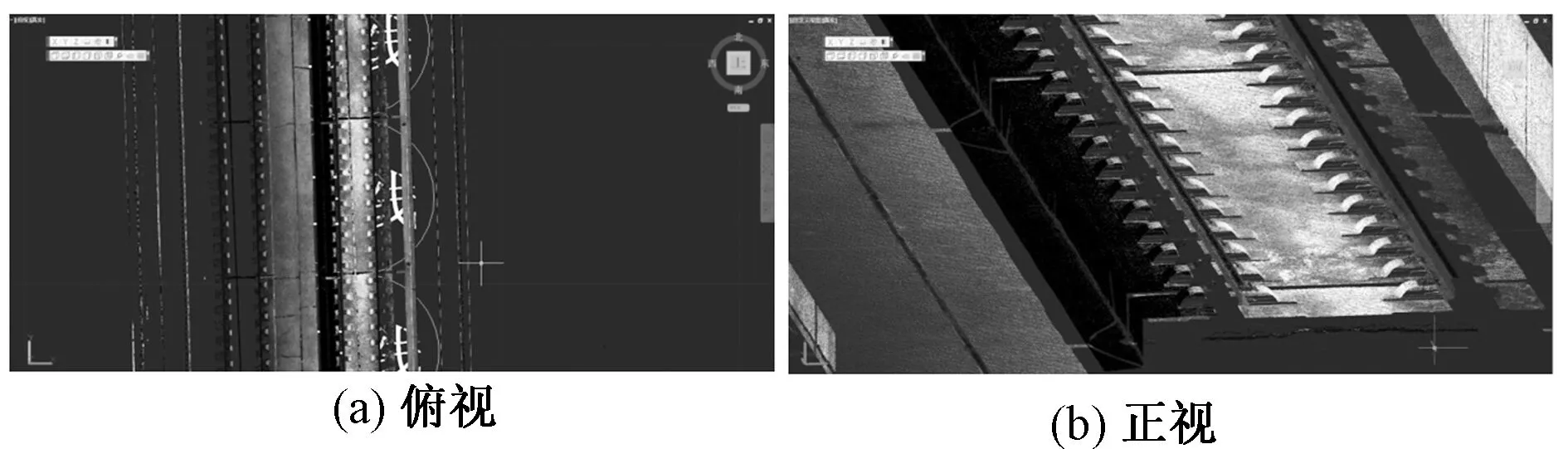
圖8 采集的雙塊式無(wú)砟軌道點(diǎn)云
3.3 軌道設(shè)施調(diào)查數(shù)據(jù)分析
以軌道板數(shù)據(jù)為例介紹軌道設(shè)施調(diào)查成果。這部分的數(shù)據(jù)都以Excel表格形式提交,最終的成果數(shù)據(jù)如表1所示。

表1 軌道板數(shù)據(jù)示例
3.4 作業(yè)效率分析
由于橋上雙塊式軌道板與其他類(lèi)型的軌道板處理方式不太相同,因此此次分別針對(duì)橋上雙塊式軌道板類(lèi)型以及其他類(lèi)型(CRTSⅠ型板、CRTSⅡ型板、CRTSⅢ型板和非橋上雙塊式軌道板)來(lái)進(jìn)行效率分析。統(tǒng)計(jì)效率因子為每人處理每公里數(shù)據(jù)所需要的時(shí)間,見(jiàn)表2。

表2 軌道板調(diào)查所需時(shí)間 min
3.5 精度驗(yàn)證
利用軌道板參數(shù)信息自動(dòng)提取算法提取軌道板的各種參數(shù)。軌道板長(zhǎng)度、軌道板接縫參數(shù)、軌道板底層設(shè)備高度以及軌道板填充層高度的測(cè)量平均誤差分別為0.10,-0.59,-0.97,1.60 mm;標(biāo)準(zhǔn)差分別為1.97,3.25,3.62,2.50 mm。
4 結(jié)語(yǔ)
車(chē)載激光雷達(dá)技術(shù)為高速鐵路無(wú)砟軌道設(shè)施臺(tái)賬調(diào)查提供了一種有效方法,經(jīng)過(guò)近200 km的高速鐵路無(wú)砟軌道設(shè)施臺(tái)賬調(diào)查應(yīng)用,驗(yàn)證了該技術(shù)的可行性。主要優(yōu)勢(shì)體現(xiàn)在:①基于車(chē)載激光雷達(dá)的高速鐵路無(wú)砟軌道數(shù)據(jù)采集調(diào)查過(guò)程,相對(duì)于傳統(tǒng)人工調(diào)查方式在效率上有了極大的提升;②該方法的應(yīng)用可以大幅度降低人力成本;③成果數(shù)據(jù)質(zhì)量和精度更為可靠;④可以自動(dòng)輸出符合高速鐵路無(wú)砟軌道設(shè)施臺(tái)賬調(diào)查管理規(guī)范的成果;⑤歷史數(shù)據(jù)可以保存,為歷史數(shù)據(jù)對(duì)比提供了保障。
在應(yīng)用過(guò)程中也發(fā)現(xiàn)了該方案存在的一些不足,主要是:車(chē)載激光雷達(dá)外業(yè)采集的點(diǎn)云數(shù)據(jù)過(guò)于龐大,目前采用的單機(jī)管理方式不能適應(yīng)大規(guī)模高速鐵路設(shè)施的調(diào)查與管理。后期可以考慮利用云存儲(chǔ)等最新的方式來(lái)進(jìn)行點(diǎn)云數(shù)據(jù)管理。
