車載供氫系統(tǒng)控制器開發(fā)
2019-03-04 03:26:26葉川馬天才陳翌楊柳明
汽車技術(shù) 2019年2期
葉川 馬天才 陳翌 楊柳明
(1.同濟大學(xué),上海 201804;2.同濟大學(xué)新能源工程中心,上海 201804)
主題詞:燃料電池客車 車載供氫系統(tǒng) 控制器
1 前言
由于能源與環(huán)境問題日益突出,傳統(tǒng)內(nèi)燃機汽車難以將排放降低到理想范圍[1,2]。燃料電池是一種高效、清潔的電化學(xué)發(fā)電技術(shù),近年來成為最有可能替代傳統(tǒng)發(fā)動機技術(shù)的先進新能源汽車技術(shù)[3]。供氫系統(tǒng)為燃料電池發(fā)動機系統(tǒng)的關(guān)鍵組成部分,車載儲氫多采用高壓氣態(tài)儲氫,壓力在20~70 MPa范圍內(nèi)[4]。目前車載供氫系統(tǒng)缺乏國內(nèi)統(tǒng)一標準,據(jù)了解國內(nèi)大多數(shù)供氫系統(tǒng)的控制被集成在燃料電池發(fā)動機控制器(FCU,F(xiàn)uelcell Con?trol Unit)中,導(dǎo)致FCU與供氫系統(tǒng)耦合過強,系統(tǒng)的移植性、兼容性較差。特別對于大型客車而言,供氫系統(tǒng)氫瓶大多設(shè)置在車輛頂部,導(dǎo)致線束過長、線束過重等問題。
近年來,相關(guān)人員針對車載供氫系統(tǒng)進行了研究與開發(fā),如,吳兵等人[4]在供氫系統(tǒng)設(shè)計中提出了HMS(氫管理系統(tǒng))的使用,但是僅針對特定供氫系統(tǒng),并沒有進行分布式設(shè)計;全書海等人[5]基于PIC18F258單片機設(shè)計了用于供氫系統(tǒng)的控制器,但是缺少針對不同供氫系統(tǒng)的兼容性和可移植性的設(shè)計,實際運用場景較為局限。
為提高燃料電池發(fā)動機系統(tǒng)的可移植性和兼容性,本文提出采用車載供氫系統(tǒng)分布式控制,并開發(fā)了獨立車載供氫系統(tǒng)控制器,通過獨立的安全監(jiān)測和控制,大大提高了車載供氫系統(tǒng)的可靠性。
2 車載供氫系統(tǒng)分析
針對車載燃料電池發(fā)動機的氣態(tài)儲氫系統(tǒng)進行控制器的開發(fā)。圖1為燃料電池發(fā)動機供氫系統(tǒng),該系統(tǒng)通常包含多個氣瓶,由管路接出后進行一級減壓,然后進入燃料電池前再次減壓,以供燃料電池反應(yīng)堆使用。每個氫氣瓶閥配有溫度傳感器用以檢測瓶閥溫度,管路上減壓閥前后分別安裝壓力傳感器檢測管路中氫氣壓力,在儲氫艙、發(fā)動機艙、客艙安裝有氫氣濃度傳感器。
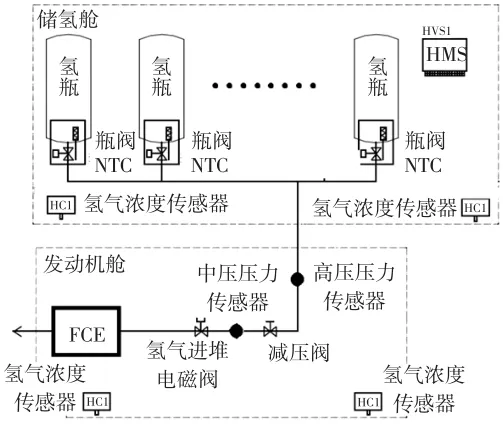
圖1 燃料電池發(fā)動機供氫系統(tǒng)
2.1 分布式控制
不同于傳統(tǒng)內(nèi)燃機系統(tǒng),燃料電池系統(tǒng)的供能系統(tǒng)(供氫系統(tǒng))具有較高的安全等級要求,并具有較多的傳感器和執(zhí)行器設(shè)備,若集成在燃料電池發(fā)動機控制器中,會增加其工作負荷,同時也會導(dǎo)致線束布置困難,供氫系統(tǒng)與燃料電池發(fā)動機系統(tǒng)耦合性較強等問題。因此采用分布式控制的方式,一方面可將供氫系統(tǒng)控制的功能從燃料電池發(fā)動機控制器中分離出來,僅使用CAN通訊就可進行控制和信息獲取,另一方面也提高了供氫系統(tǒng)的可移植性和安全性,方便燃料電池系統(tǒng)進行模塊化管理。
2.2 供氫系統(tǒng)功能需求
2.2.1 硬件功能需求
根據(jù)供氫系統(tǒng)瓶閥和傳感器布置(圖1),得到供氫系統(tǒng)控制器需求如表1所列。
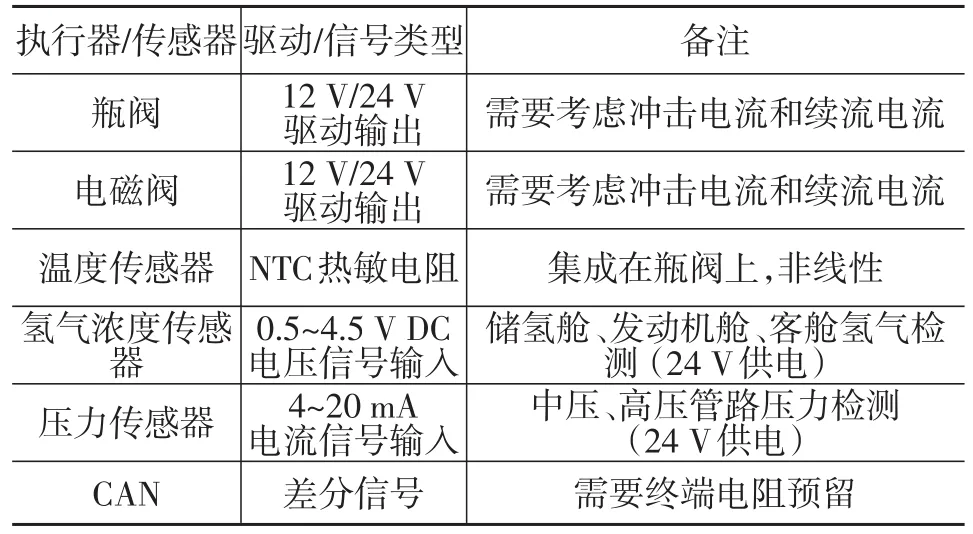
表1 供氫系統(tǒng)控制器需求
2.2.2 供氫安全需求
由于氫氣分子小,在供氫管路中輸送時有輕微泄露和聚集的風(fēng)險[4],因此需要對空氣中氫氣濃度進行實時監(jiān)控。
對于高壓儲氫系統(tǒng),需要對高壓供氫管路進行壓力監(jiān)控來確保燃料電池系統(tǒng)能正常工作。除此之外,燃料電池反應(yīng)堆對輸入的氫氣壓力有一定要求,因此需由中壓傳感器來監(jiān)控進堆氫氣的壓力是否正常。
在燃料電池客車系統(tǒng)中,儲氫瓶常放置在客車棚頂,氣溫的變化會導(dǎo)致氫氣壓力變化,影響燃料電池發(fā)動機工作,因此需要對供氫系統(tǒng)進行溫度檢測。
綜上所述,對供氫系統(tǒng)的安全管理,需要對各個傳感器數(shù)據(jù)進行監(jiān)控并上報,對于出現(xiàn)異常的數(shù)據(jù)需要確定故障等級,并同時執(zhí)行相應(yīng)的緊急操作,以保證供氫系統(tǒng)的可靠性。
2.3 供氫系統(tǒng)控制器資源
在燃料電池客車電氣系統(tǒng)分配中,控制器由車載24 V電源供電,通過合理分配接插件和MCU剩余資源,滿足控制器對主流車載供氫系統(tǒng)的兼容性,由此確定的控制器資源見表2。
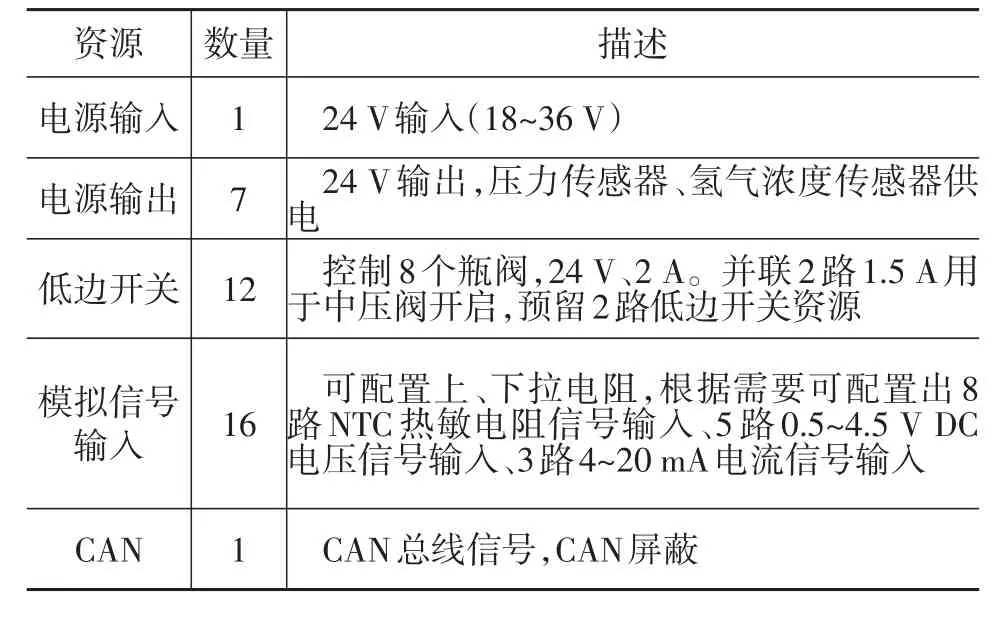
表2 車載供氫系統(tǒng)控制器資源
3 車載供氫系統(tǒng)控制器硬件設(shè)計
3.1 控制器硬件架構(gòu)
車載燃料電池供氫系統(tǒng)控制器(HCU)采用的是恩智浦(NXP)HCS08系列微控制器MC9S08DZ60MLH,硬件總體設(shè)計框架如圖2所示,主要由MCU模塊、電源模塊、信號采集模塊、低邊驅(qū)動模塊、CAN通訊模塊組成,通過分模塊電路設(shè)計可實現(xiàn)功能模塊替換和復(fù)用。
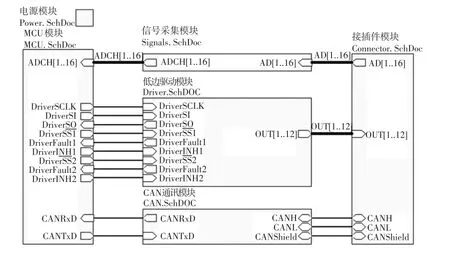
圖2 車載供氫系統(tǒng)控制器硬件設(shè)計框架
3.2 控制器電源模塊設(shè)計
控制器電源模塊采用9~36 V電壓輸入,利用DCDC降壓電路輸出5 V電壓,為控制器各芯片供電。根據(jù)系統(tǒng)資源,需使用濾波處理后的12 V/24 V電源用于傳感器供電,并添加保險絲對傳感器進行保護。
3.3 控制器AD信號處理電路設(shè)計
本控制器需要處理NTC型熱敏電阻溫度傳感器信號、氫氣濃度傳感器信號及壓力傳感器信號,通過上、下拉電阻配置轉(zhuǎn)換成電壓信號供MCU進行AD采樣。控制器外接傳感器信號見表3。
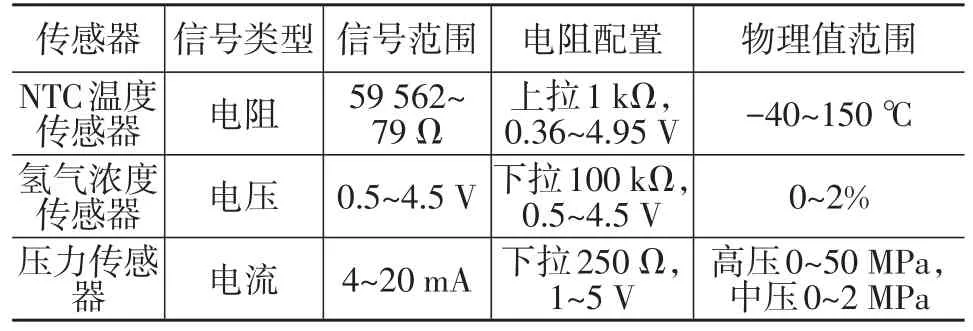
表3 控制器外接傳感器信號
在AD信號的處理電路中,使用了軌到軌運算放大器AD8626。將傳感器輸入信號處理成0~5 V的電壓信號,再通過信號跟隨電路進入單片機AD處理管腳,處理電路如圖3所示。
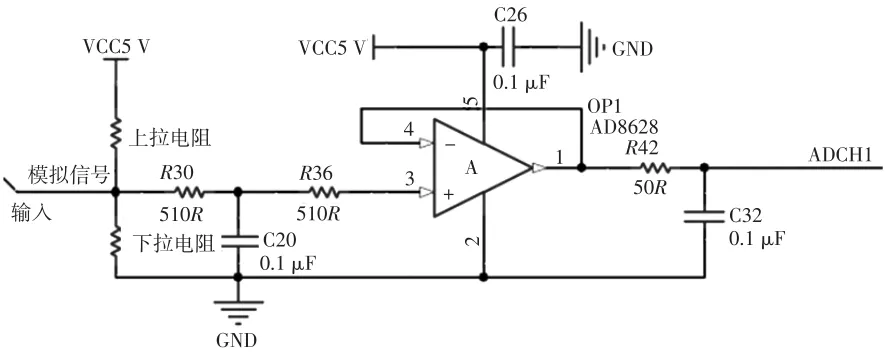
圖3 氫氣濃度傳感器電壓信號處理電路
3.4 控制器低邊開關(guān)驅(qū)動電路設(shè)計
低邊驅(qū)動模塊選擇的驅(qū)動芯片是英飛凌的六通道SPI低邊開關(guān)TLE6232 GP,驅(qū)動信號輸出通過SPI接口進行控制。為了保護電路,利用續(xù)流二極管MBRS4201T3G吸收電磁閥關(guān)閉時產(chǎn)生的瞬態(tài)電流。在二極管的入口端增加了一個4.7 nF的陶瓷電容,用于吸收續(xù)流時的尖峰電流,電路原理圖如圖4所示。
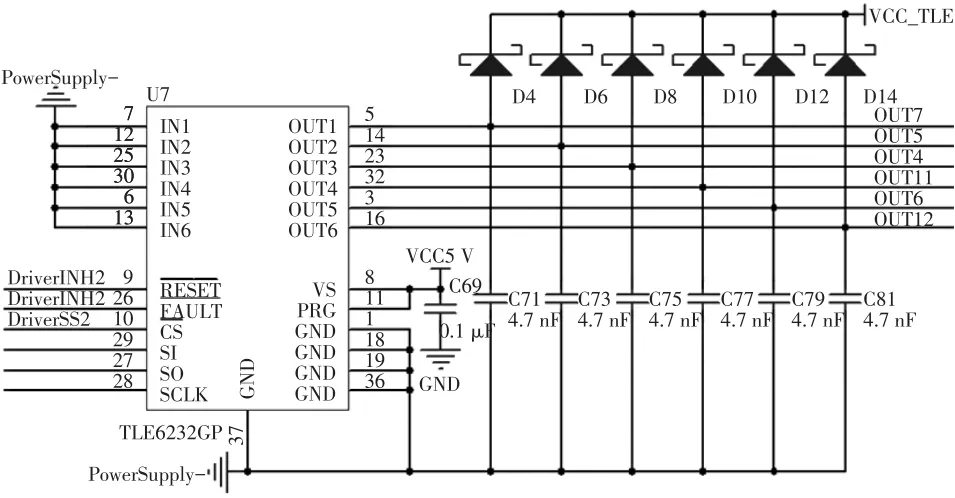
圖4 TLE6232GP設(shè)計電路原理圖
3.5 控制器CAN總線通訊模塊電路設(shè)計
3.5.1 CAN總線電路
在燃料電池客車的CAN通訊協(xié)議定義中使用的總線速率為250 kbps,圖5是利用CAN收發(fā)器PCA82C250設(shè)計的CAN收發(fā)電路,在總線端設(shè)置了CAN屏蔽端和終端電阻。
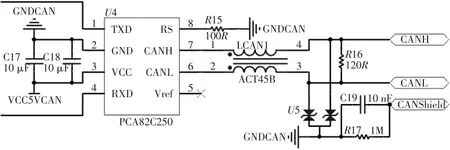
圖5 CAN收發(fā)電路原理圖
3.5.2 CAN電源隔離
在大多數(shù)的遠程數(shù)據(jù)通訊中,通常存在很大的地電位差,如圖6所示。該電位差形成了地電流回路,耦合到數(shù)據(jù)電路上會形成共模噪聲。如果共模噪聲過大就可能對器件造成損壞。除此之外,不穩(wěn)定的輸入電源和大功率的感性負載造成高頻干擾和高幅值的瞬態(tài)干擾也可能損壞CAN總線通訊接口以及后級電路。
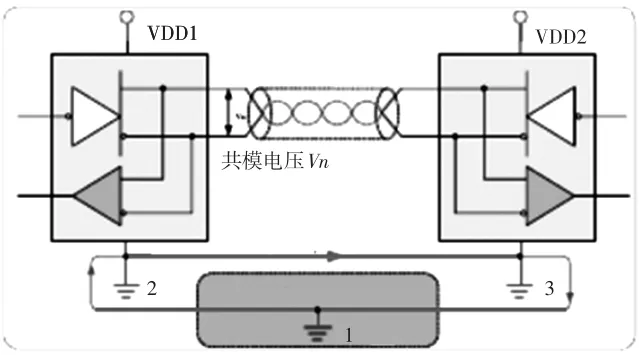
圖6 地電位差形成地回路電流
因此本控制器上使用的ANALOG DEVICES雙通道數(shù)字隔離器ADuM5201W集成隔離式的DC-DC轉(zhuǎn)換器,在5 V輸入電源下提供500 mW的穩(wěn)壓隔離電源,通過磁性元件進行雙通道的邏輯信號傳輸,如圖7所示。由于該隔離器的開關(guān)頻率達180 MHz,可能會引起比較大的高頻電磁干擾,PCB(印制電路板)設(shè)計時需要注意電磁屏蔽。
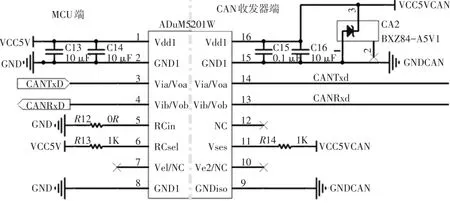
圖7 CAN電路隔離原理圖
4 車載供氫系統(tǒng)控制器軟件設(shè)計
本控制器基于狀態(tài)機控制、任務(wù)調(diào)度模式進行軟件編寫,圖8為控制器軟件系統(tǒng)流程圖。系統(tǒng)在初始化結(jié)束后,程序主循環(huán)執(zhí)行狀態(tài)機控制、任務(wù)調(diào)度、清空看門狗。
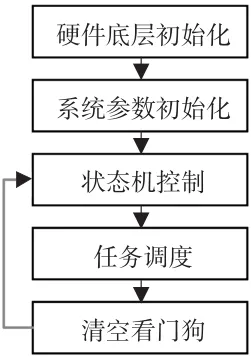
圖8 控制器軟件系統(tǒng)流程
4.1 狀態(tài)機設(shè)計
本控制器具有啟動、就緒、自動、手動、故障、標定共6個工作狀態(tài),按照圖9進行狀態(tài)機切換。
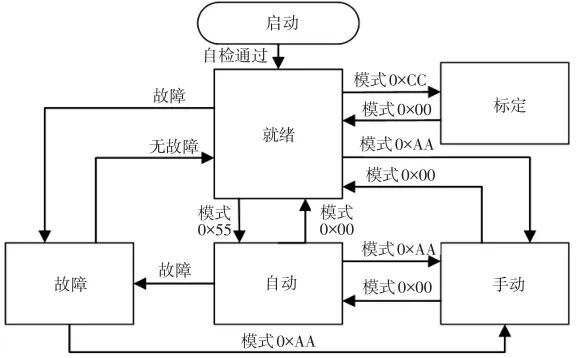
圖9 控制器狀態(tài)機框圖
a.控制器上電后進入啟動狀態(tài)。在此狀態(tài)下將自動進行系統(tǒng)自檢,保證系統(tǒng)執(zhí)行器和傳感器等上電成功,各模塊工作穩(wěn)定,信號輸入和驅(qū)動輸出正常。如果系統(tǒng)無故障報出則進入就緒狀態(tài)。
b.就緒狀態(tài)下,等待CAN消息幀確定控制器工作模式,并進入對應(yīng)工作狀態(tài),工作模式定義見表4。
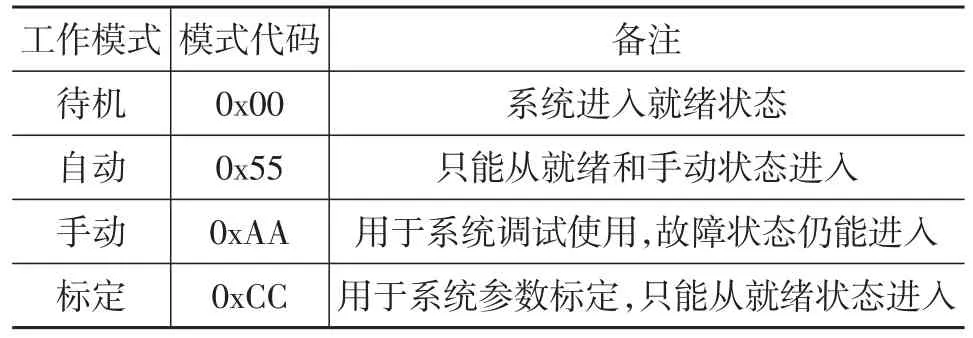
表4 控制器工作模式定義
c. 接收到自動模式(0x55)命令后進入自動狀態(tài)(系統(tǒng)正常運行狀態(tài))。此狀態(tài)下可接受來自CAN總線上的控制指令,輸出相應(yīng)驅(qū)動信號,上傳傳感器信息和控制器狀態(tài)信息,若出現(xiàn)故障進入故障狀態(tài)。
d. 接收到手動模式(0xAA)命令后進入手動狀態(tài),主要用于系統(tǒng)調(diào)試。在該狀態(tài)下,若發(fā)現(xiàn)系統(tǒng)故障則不進入故障狀態(tài)。
e. 在故障狀態(tài)下,執(zhí)行不同故障處理,見表5。
f. 在標定狀態(tài)下,可標定瓶閥數(shù)量、傳感器數(shù)量、傳感器類型等,同時添加工程代號、標定日期用以對不同系統(tǒng)的控制器進行區(qū)分,以提高控制器的兼容性。
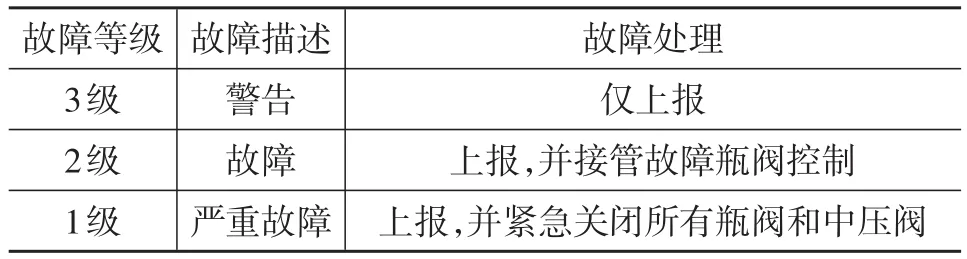
表5 控制器故障狀態(tài)定義
4.2 任務(wù)調(diào)度設(shè)計
控制器的軟件設(shè)計采用了任務(wù)調(diào)度模式,根據(jù)狀態(tài)機、執(zhí)行頻率進行任務(wù)分化,并將任務(wù)分為控制器層和系統(tǒng)層,采用分模塊代碼管理,如圖10所示。在本程序架構(gòu)中,任務(wù)調(diào)度流程如圖11所示。
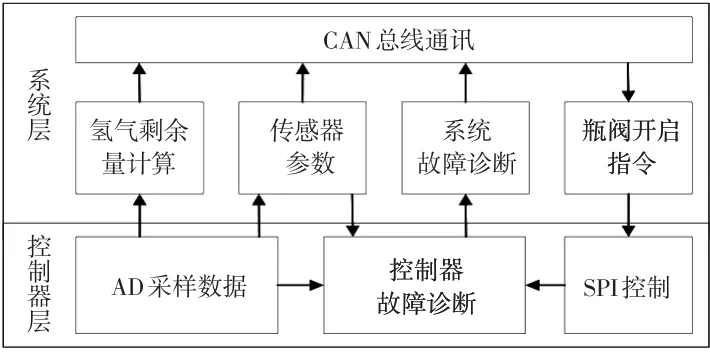
圖10 系統(tǒng)軟件架構(gòu)
a.AD采樣模塊對輸入信號采樣,計算得出實際物理值,用于氫氣剩余量計算和進行后續(xù)的故障檢測。
b.根據(jù)溫度、壓力信息計算氫氣剩余量。
c.CAN信息接收來自主控制器的控制指令,包括執(zhí)行器動作和控制器狀態(tài)機切換等。此外,根據(jù)整車網(wǎng)絡(luò)規(guī)劃,按照應(yīng)答時序?qū)⒖刂破鞑杉降膫鞲衅餍盘栆约翱刂破鳡顟B(tài)、故障信息等上報給主控制器。
d. 驅(qū)動控制采用SPI與驅(qū)動芯片通訊,控制周期為100 ms/次,瓶閥交替開啟以避免同時開啟時沖擊電流較大,同時獲取驅(qū)動芯片的故障信息用于故障診斷。
e. 故障診斷首先檢測控制器所有傳感器和執(zhí)行器的故障情況,保存故障診斷數(shù)據(jù)以用于控制器的調(diào)試。然后將診斷數(shù)據(jù)轉(zhuǎn)換成系統(tǒng)需要的故障上報格式。
4.3 氫氣剩余量計算
根據(jù)車載儲氫方式,同等容積下氣體量只與密度相關(guān),我國燃料電池車普遍采用35 MPa氫系統(tǒng),若在35 MPa壓力、15℃溫度條件下為額定儲氫100%狀態(tài),則氫氣剩余量計算式為:

式中,SOC氫氣為氫氣剩余量;ρ為氫氣氣體摩爾密度;P為氫氣壓力;T為氫氣溫度;ρ0為額定儲氫100%時氫氣摩爾密度。
由于氫氣的儲存壓力在10 MPa以上時,氫氣的物理性質(zhì)會偏離理想氣體狀態(tài),所以不能直接使用理想氣體狀態(tài)方程[6],此處采用壓縮系數(shù)法來表示狀態(tài)方程:

式中,z為壓縮系數(shù);n為氣體物質(zhì)的量;R為理想氣體常數(shù)。由氣體摩爾密度ρ=n/V得到:

利用維里方程,將實際氣體的壓力表示為密度和絕對溫度下維里系數(shù)的冪方和,絕對溫度下的維里方程可以表述為壓力的平方,并將維里系數(shù)降階計算從而得到壓縮系數(shù)計算公式[7]:

利用實時采集溫度和壓力信息,將式(3)代入式(4)可計算得到當前氫氣實際密度,并根據(jù)式(1)得到當前氫氣剩余量。
5 控制器驗證
在實際供氫環(huán)境下,利用CAN總線測試儀和上位機軟件進行功能測試。由圖12控制器上位機監(jiān)控界面可看出,控制器能夠正確上報傳感器信息和控制器狀態(tài),并在實際場景能夠正確打開瓶閥,說明所設(shè)計控制器已滿足供氫系統(tǒng)功能需求。
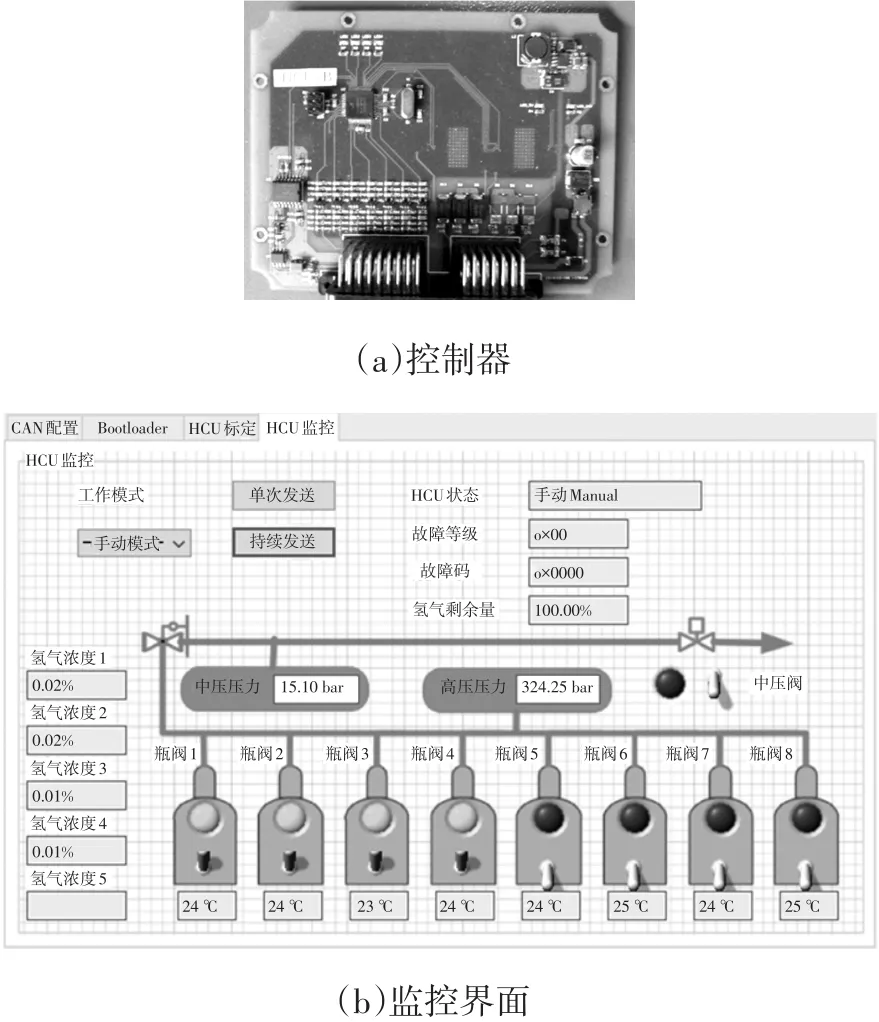
圖12 控制器及上位機監(jiān)控界面
在實際系統(tǒng)運行過程中,燃料電池系統(tǒng)保持恒定功率運行,通過CAN總線通訊采集到的氫氣剩余量與壓力、溫度的關(guān)系如圖13所示。據(jù)了解,許多系統(tǒng)用壓力來表征氫氣剩余量,本控制器考慮了壓力和溫度共同的影響,得到的氫氣剩余量信息更加準確,有助于車輛續(xù)駛里程的計算。
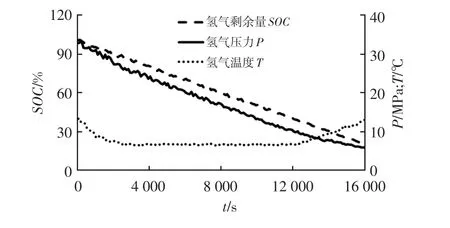
圖13 氫氣剩余量與壓力、溫度的關(guān)系
6 結(jié)束語
本文提出分布式車載供氫系統(tǒng)控制器方案并進行了軟硬件開發(fā),實現(xiàn)了對供氫系統(tǒng)溫度、壓力、氫氣濃度等數(shù)據(jù)進行檢測,并對瓶閥和管路電磁閥進行控制,完成了氫氣剩余量計算、故障診斷、CAN總線信息上報、控制器標定等功能,提高了供氫系統(tǒng)的可靠性和可移植性,該控制器軟硬件的兼容性設(shè)計可基本適應(yīng)不同車載供氫系統(tǒng)需求。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
