基于連通區域提取的中尺度渦自動檢測方法研究?
2019-03-01 02:52:26劉纘然
計算機與數字工程 2019年1期
葛 艷 劉纘然
(青島科技大學信息科學技術學院 青島 266061)
1 引言
隨著科學和技術的發展,人類與海洋的關系越來越密切。海洋向人類提供生存和發展必不可少的物質和能源,同時對地球氣候與生態變化有著重要的影響。例如,在世界各大海洋中存在著一種普遍的海洋現象:中尺度渦。這種海洋上的渦旋,對海水中熱量、鹽分、化學物質的輸運及分區動力條件的改變起著重要作用的同時,還會攪亂海水的穩定性,給海洋生物和海洋漁業造成嚴重破壞,對船運也會造成巨大影響[1~2]。因此,用特征可視化的手段,觀察和檢測這類復雜的流場中的特征結構就具有重大意義和科學價值。
海洋中尺度渦是一種非固定形狀的自然目標識別,這是計算機圖像識別中的一個難題。但是,對于海洋遙感圖像中尺度檢測和識別如果僅僅通過專家判讀方法解譯,不僅勞動強度大,而且具有不可避免的人為因素,無法滿足快速、自動檢測的需求。因此,研究海洋遙感中尺度渦檢測和信息提取方法,提高中尺度渦檢測的智能化和準確性,具有較高的實用價值。
在中尺度渦檢測方面,國內外學者都做了大量的研究,有很多的技術和數學方法被用于中尺度渦特征的識別和分析中。比較常用的方法有以下幾種:
1)基于洋面高度信息的漩渦提取[3~4]。在漩渦形成時,洋面高度會有顯著變化,所以可通過此特征檢測漩渦。用本方法在各種氣候條件下提取漩渦是很可靠的,但是這種方法消耗的費用成本非常高。
2)基于溫度場信息的漩渦提取。該方法利用洋流的熱力差異來識別漩渦[5]。此方法對于狀態描述的計算存在瑕疵。
3)基于衛星跟蹤浮標的漩渦提取。賀志剛利用四顆衛星跟蹤浮標和同一時間的TOPER/PO-SEIDON高度計數據獲取漩渦的動態信息[6]。此方法費用成本非常昂貴并且不適合進行大面積提取。
4)基于衛星圖像特征信息的漩渦提取。Peckinpaugh等基于遙感圖像的邊緣,提出了直接利用Hough變換圓檢測算子進行渦檢測的方法[7~8]。由于渦形態的復雜性,其檢測邊緣曲線一般不是一個規則的圓,故該方法還是比較粗略的。同時,Hough變換的一個主要缺點是隨著處理數據量的增加,所需要的存儲和計算量急劇增加,同時檢測誤差也隨之增大。
以上方法在對遙感反演的長時間序列海洋要素場數據的快速、自動化信息分析與預報方面還存在欠缺,亟待與人工智能和模式識別方法相結合,尋找物理海洋領域定量研究的新技術手段和方法。本文遵循在中尺度漩渦提取中精度和速度尤為重要的原則,在基于圖像特征信息的漩渦提取的基礎上,提出了一種全新的中尺度渦自動檢測方法。
2 基于連通區域提取的中尺度渦自動檢測方法
本文對遙感圖像中尺度渦檢測研究,主要使用的是高分三號衛星L1B級和L2級的HH和DH極化圖像,成像日期為2016年12月至2017年2月,其成像參數如表1所示。
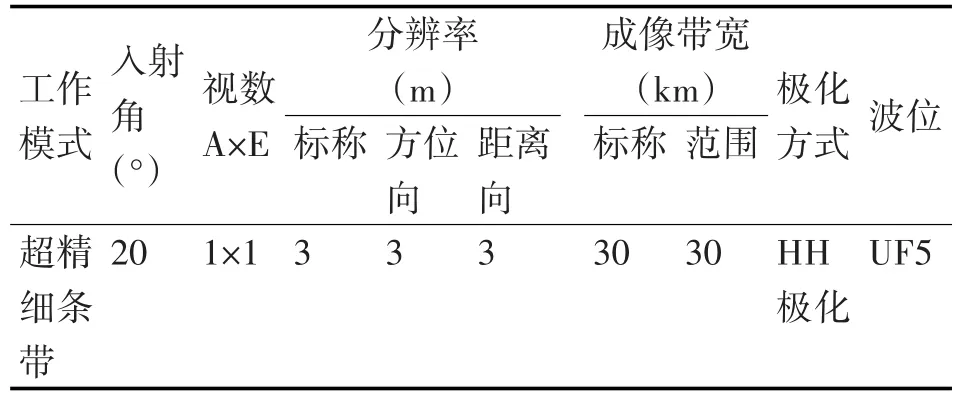
表1 SAR成像參數示例
遙感圖像中的中尺度渦檢測過程分為三個步驟:圖像預處理,圖像檢測和圖像標記。流程圖如圖1所示。
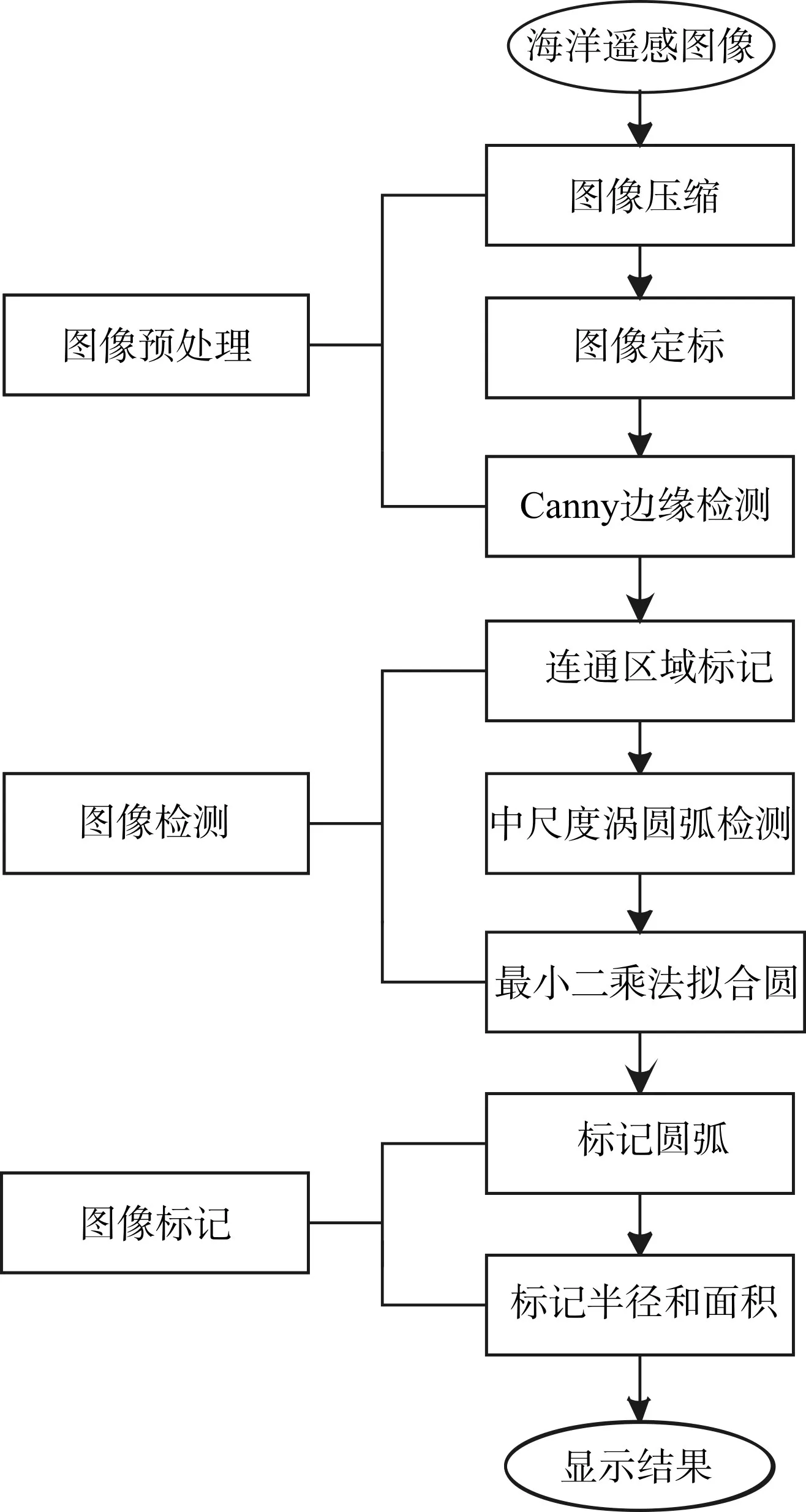
圖1 圖像檢測流程圖
2.1 圖像預處理
對遙感圖像的預處理分為圖像壓縮,輻射定標和邊緣檢測三部分。
2.1.1 圖像壓縮
圖像壓縮是將原本行列數較多的圖像壓縮為行列數較少的圖像,以提升后面圖像紋理的計算速度。具體的壓縮過程如下:
1)以4000為行列數的標準,取行數和列數除以4000的最小值為該圖像的壓縮系數;
2)當該系數為n并大于等于2時,則進行n*n的模板的均值計算,并將均值放入相應的行列數當中。
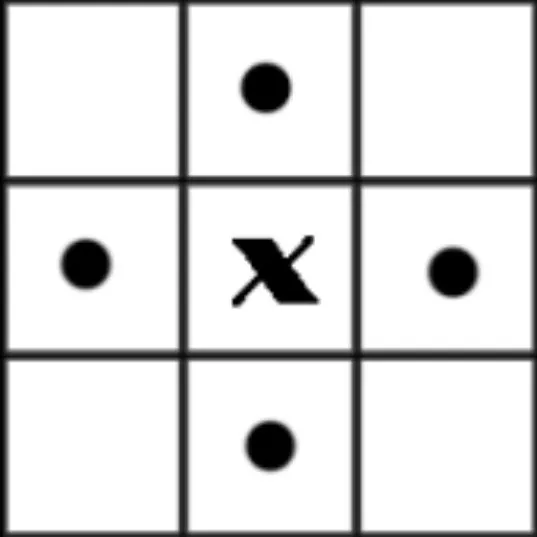
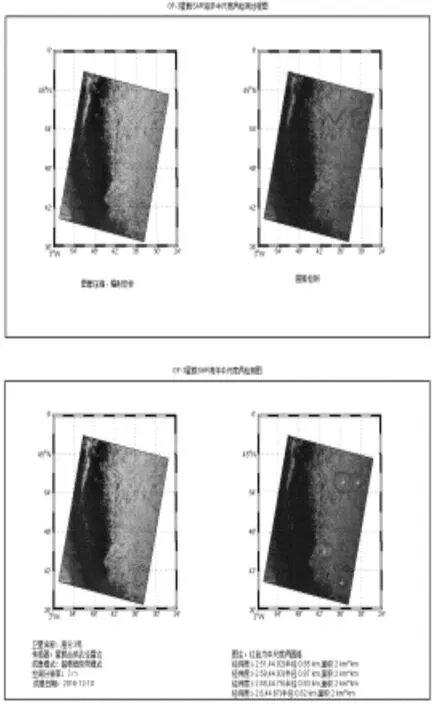
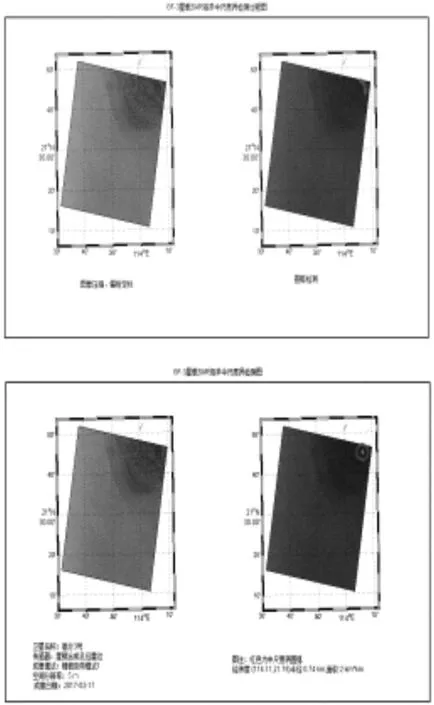
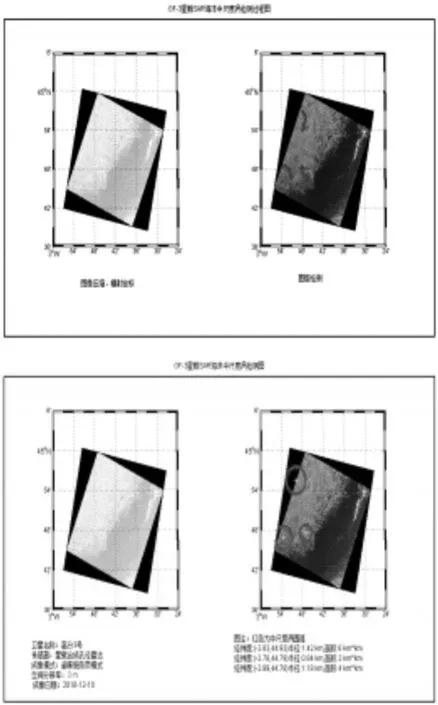
3)若該行列數能整除n,則將余下的行列進行n*m(m 2.1.2 輻射定標 輻射定標是將傳感器記錄的無量綱的DN值轉換成具有實際物理意義的量,在此指計算成后向散射系數。主要是通過以下公式對圖像進行定標: 2.1.3 圖像Canny邊緣檢測 1986年,JOHN CANNY提出一個很好的邊緣檢測算法,被稱為Canny邊緣檢測器[9]。Canny邊緣檢測根據對信噪比與定位乘積進行測度,得到最優化逼近算子,也就是Canny算子。類似與LoG邊緣檢測方法[10],也屬于先平滑后求導數的方法。檢測階躍邊緣的基本思想是在圖像中找出具有局部最大梯度值的像素點。其大部分工作集中在尋找能夠用于實際圖像的梯度數字逼近,圖像梯度逼近必須滿足如下兩個要求: 1)能有效地抑制噪聲; 2)必須盡量精確確定邊緣的位置。 Canny邊緣檢測器是高斯函數的一階導數,是對信噪比與定位之乘積的最優化逼近算子。Canny邊緣檢測有3個顯著的優勢: 1)正確率高,不會漏找邊緣,或者出現偽相應邊緣; 2)單邊緣點相應,只有真實存在的邊緣點,才會響應,不會出現多個邊緣響應; 3)邊緣定位精確度高,擬合的像素點盡可能貼近真實邊緣。 Canny邊緣檢測算法的基本過程如下[11~12]。 1)圖像平滑 將圖像表示成一個離散化的二維灰度值函數f(x,y),使用二維高斯函數的導函數作為圖像平滑濾波器。由于求導和求卷積是可交換的,所以先用高斯函數平滑濾波然后再求導: 其中高斯濾波函數為 σ為高斯濾波器標準方差,決定圖像的平滑程度。 2)梯度幅值計算 采用2*2鄰域一階偏導的有限差分計算平滑后的圖像I(x,y)的梯度方向和幅值,其一階偏導為 在求出x和y方向上的偏導后,利用二范數計算梯度幅值為: 梯度方向為 通過梯度方向,可以找到這個像素梯度方向的鄰接像素。 3)梯度圖像的非極大值抑制 通過上述步驟,可以將圖像中的邊緣連成輪廓。為了后續的繼續處理,我們需將輪廓形成單像素邊緣,即對梯度幅值圖像M[i,j]中的屋脊帶進行邊緣細化,保留幅值局部變化最大的點。即對于圖像的每一個點m[i,j]以及上一步中得到的梯度方向,我們將其與梯度方向上的2個值進行比較,如果m[i,j]小于梯度方向上的2個梯度幅值,說明該點不是局部最大值,則將m[i,j]對應的邊緣標示為0,即該點不是邊緣點。 4)閾值化處理 經過上述對圖像的預處理,已將圖像處理為二值圖像。然而,對二值圖像分析最重要的方法就是連通區域標記。它是所有二值圖像分析的基礎,它通過對二值圖像中白色像素(目標)的標記,讓每個單獨的連通區域形成一個被標識的塊。從而進一步就可以獲取這些塊的輪廓、外接矩形、質心、不變矩等幾何參數。 2.2.1 連通區域 在圖像中最小的單位是像素,每個像素周圍有8個鄰接像素,常見的鄰接關系有2種:4鄰接與8鄰接。4鄰接共4個點,即上下左右,如圖2所示。8鄰接的點共有8個,包括了對角線位置的點,如圖3所示。 圖2 四鄰域 圖3 八鄰域 如果像素點A與B鄰接,稱A與B連通,于是我們有如下的結論: 1)如果A與B連通,B與C連通,則A與C連通。 2)在視覺上看來,彼此連通的點形成了一個區域,而不連通的點形成了不同的區域。這樣由所有彼此連通點構成的集合,稱為一個連通區域[13~14]。 在圖4中,如果考慮4鄰接,則有3個連通區域;如果考慮8鄰接,則有2個連通區域。(注:圖像是被放大的效果,圖像正方形實際只有4個像素)。 圖4 連通區域 2.2.2 連通區域提取 在電子商務運營課程教學方式方面,要一改常態,采用案例教學、分組教學相結合,這樣既可以調動學生的積極性,同時還可以讓學生從活生生的例子中汲取重要的知識點,從中可以學到很多書本上學不到的知識點。還要定期進行實戰演練,如:企業模擬平臺。要讓每位學生都可以經歷實戰操作,通過實戰來檢驗學習的成果,這樣可以很好讓學生把理論知識轉化為實踐技能。 本文運用八鄰域標記算法對圖像進行標記,運用直接掃描標記算法把連續區域作同一個區域進行標記[15~16]。八鄰域標記算法步驟如下: 1)循環遍歷圖像中的每一個點(i,j),判斷點(i,j)八鄰域中最左,左上,最上,上右方向的情況,如果沒有其他點,則判定為一個新的連通區域的開始; 2)如果點(i,j)八鄰域中最左、上右都有點,則標記點(i,j)為這兩個中的最小標記點,并修改大標記為小標記; 3)如果點(i,j)八鄰域中的左上、上右都有點,則標記(i,j)為這兩個中的最小標記點,并修改大標記為小標記; 4)如果以上情況都不存在,則按照最左、左上、最上、上右的順序,標記此點(i,j)為四個中的一個。 若圖像是四鄰域的,則一定是八鄰域的。 2.2.3 中尺度渦圓弧檢測 通過以上步驟,每一個連通區域都有唯一的一個值相對應。對圖形處理起來也簡單的多。以下是檢測符合中尺度渦圓弧的步驟: 1)為防止圖像邊界影響檢測的準確性,通過分析和咨詢專家,若連通區域的長度或寬度大于整副圖像長度或寬度的二分之一,將此連通區域視為邊界噪聲線,舍去。并將此條連通區域所對應的坐標上的值賦為0。同時,將連通區域的總條數減1。 2)循環遍歷剩下的連通區域,對每條連通區域進行處理,選取其中長度和寬度分別符合設定閾值范圍的圓弧(此閾值參數是根據多組數據的分析和專家從影像中識別出的多個漩渦數據作為基礎設定的)。 3)尋找每條符合中尺度渦圓弧的特征點,擬合中尺度渦。 2.2.4 中尺度渦擬合 在中尺度渦圓弧檢測的基礎上,首先對每條符合中尺度渦圓弧的連通區域尋找特征點,然后根據特征點擬合中尺度渦。本文主要通過任意不共線的三點,運用最小二乘法對中尺度渦進行擬合。 通過觀察總結容易看出,每條圓弧的特征點無非就是X軸方向上的最小值點(A點)和最大值點(B點),以及Y軸方向上的最小值點(C點)和最大值點(D點)四點。從四點中尋找更具特征性的三點,步驟如下: 1)固定X軸方向上的最小值點(A點)和最大值點(B點),若Y軸方向上的最小值點(C點)的橫坐標距離A點的橫坐標或者距離B點的橫坐標小于設定的閾值,則將C點舍去,選取ABD三點進行中尺度渦擬合; 2)若Y軸方向上的最小值點(C點)的橫坐標距離A點的橫坐標或者距離B點的橫坐標不小于設定的閾值,則選取ABC三點進行中尺度渦擬合。 本文中設定的距離閾值為50像素,實驗表明此閾值合適。 基于以上得到的不共線的三個特征點,運用最小二乘法對中尺度渦進行擬合,同時返回擬合后的圓心和半徑。根據圓心坐標確定中尺度渦的經緯度位置,按照遙感圖像的實際寬度和圖像的矩陣寬度之間的比例計算近似半徑,從而得到近似中尺度渦的面積。 為了檢測本文方法的有效性,分別選取了高分三號衛星L1B級和L2級的遙感圖像進行檢測測試。 經過圖像預處理,連通區域檢測等步驟之后,對三幅不同的遙感圖像進行圓弧檢測和中尺度渦擬合分別如圖5~7所示。實驗表明,本文算法對海洋遙感圖像的中尺度渦具有良好的檢測性。 圖5 中尺度渦圓弧檢測和圓弧擬合實例1 圖6 中尺度渦圓弧檢測和圓弧擬合實例2 圖7 中尺度渦圓弧檢測和圓弧擬合實例3 為了提高中尺度漩渦提取精度和速度,本文提出的基于連通區域提取的海洋中尺度渦自動檢測方法。首先對遙感圖像數據預處理,包括圖像壓縮、圖像定標、圖像邊緣檢測;然后對圖像進行連通區域提取,計算其特征參數;最后對這些連通區域判別檢測,實現對遙感圖像中尺度渦的自動檢測和標注。實驗表明,該中尺度渦自動檢測方法,對圖像中漩渦的提取是行之有效的,同時有許多地方需要進一步完善。在檢測中尺度渦圓弧時,定義的閾值參數已基本滿足目前的圖像檢測,為繼續提高準確度,同樣需要更多的數據進行訓練。在中尺度渦擬合后,由于是按照圓的半徑計算其面積,與真實值還有一定誤差,此步驟算法還需進一步完善。




2.2 圖像檢測
3 實驗結果
4 結語
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
電測與儀表(2015年5期)2015-04-09 11:30:52
