無人水面艇響應模型的參數辨識方法研究?
2019-03-01 02:52:04姜曉政張建強
計算機與數字工程 2019年1期
姜曉政 劉 忠 張建強 陳 霄
(海軍工程大學電子工程學院 武漢 430000)
1 引言
無人水面艇(Unmanned Surface Vehicle,USV)是依靠自主方式在水面航行的無人化、智能化的平臺,被主要用來執行危險及不適合人工操作的任務,已成為國內外智能化海洋裝備的研究熱點[1]。為在復雜海洋環境下有效操控USV,需要首先確定可靠的船舶操縱響應模型,利用系統辨識的方法來確定模型是最簡單有效也相對精確的方法。
野本謙作[3]將船舶的運動狀態作為受控系統進行研究,最早提出以一階方程的兩個系數K、T作為衡量船舶操縱性能的重要指標,故獲得準確可靠的參數值對船舶操縱決策研究和船舶運動預報具有重要意義。現有的操縱性指數K、T計算方法主要有四類:一是野本標準Z形操縱試驗法[7];二是基于統計分析的回歸公式估算法[12];三是利用Clarke線性流體導數回歸公式計算法[9],四是基于實船試驗數據的船舶操縱性指數預報圖[8]。
本文首先建立了Nomoto一階操縱運動響應模型,然后在實船Z形操舵響應和定常回轉試驗數據分析的基礎上,利用改進的野本標準Z形操縱試驗法(簡稱野本標準法)、最小二乘遞推算法[6]和分步數據處理法,分別對模型參數進行了辨識,最后通過Matlab仿真驗證和實船試驗數據對比,試驗結果表明分步數據處理法具有更高的辨識精度。
2 USV響應模型
USV響應模型[3]是通過描述系統輸出(如艏向角、轉艏角速度等)對系統輸入(如舵角、螺旋槳轉速等)的動態響應關系建立的模型。該模型可直接通過規定的實船試驗經系統辨識獲得,本文借助常用的野本一階K-T方程,即Nomoto模型[15]來描述USV的操縱運動響應過程。Nomoto模型包括以下兩類[2]:
一階線性響應模型為

一階非線性響應模型為

其中,δ=δm+δr,式中 δm為操舵角,δr為舵角誤差,ψ表示艏向角,δ表示舵角,K表示回轉性指數,T表示追隨性指數,α為非線性系數,上述參數共同決定了船舶的操縱性。
3 參數辨識方法及其試驗設計
3.1 改進的野本Z形操縱試驗法
在建立船舶操縱響應模型過程中,如何通過研究艏向角或轉艏角速度對舵角的響應關系,精確辨識確定模型參數成為模型建立的關鍵[7]。在傳統野本Z形試驗辨識[7]過程中,由于進行離散分析時沒有記錄采樣點以外的數據,角速度等斜率值也是經手繪曲線獲得的,精度值和可信度低。針對存在的上述問題,文獻[16]提出一種改進措施,即采用曲線擬合分析方法,使用Matlab通過最小二乘曲線擬合對試驗得到的離散點δ和ψ進行處理,生成一條連續光滑的曲線ψ-t,然后對曲線δ-t和ψ-t進行圖解分析,對其結果加權平均可得到K、T值。
進行實艇的Z形操舵試驗主要是為了考察艇體在低頻、小舵角情況下實艇在航行過程中改變和保持航向的能力,Z形操舵試驗方法可參考文獻[12],經試驗可得到δ-t,ψ-t擬合特征曲線如圖1。
選用一階線性響應模型(1),取時間間隔(ta,tb),對式(1)進行積分,可得:

1)在圖1上選取 te、t′e、t″e三個特征點,分別測量 ψ˙(te)= ψ˙(t′e)= ψ˙(t″e)=ψ˙0位置點處的艏向角,帶入式(2)解聯立方程組,可得K的平均值。
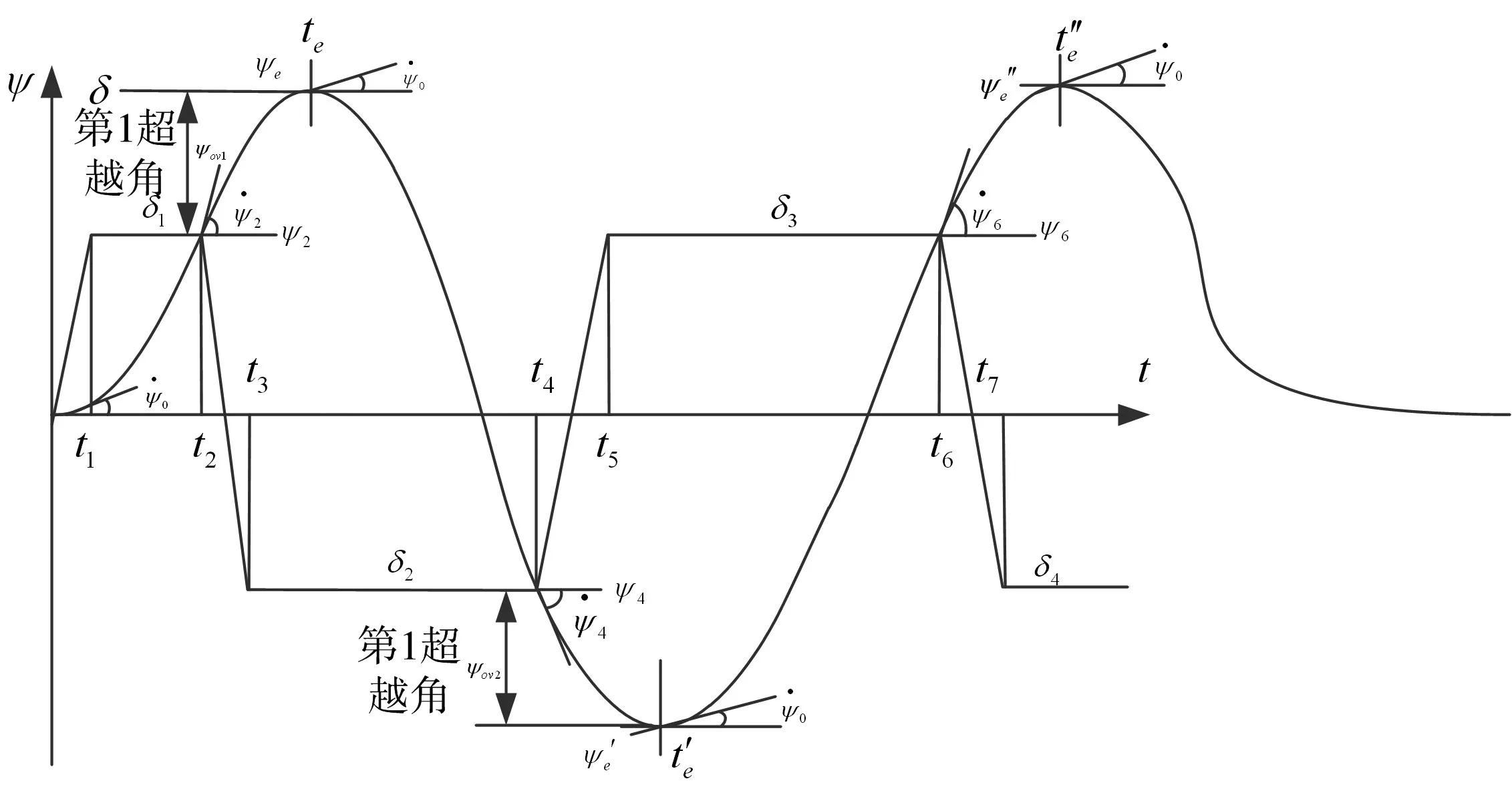
圖1 Z形試驗,δ-t,ψ-t擬合特征曲線
2)再分別取時間間隔(t2,te)(t4,)(t6,)帶入式(2)進行積分,求解聯立方程組可得T的平均值。
由于在這條擬合曲線上,擬合誤差會隨著擬合曲線階數增高而減小,從而保證在未知時間點處的函數值與真實值之間的誤差最小。
3.2 最小二乘遞推算法
前述野本標準法選用的是一階線性模型,僅根據擬合特征曲線上少數幾個特征點即定出參數K、T,缺乏整體擬合的思想,若將此模型推廣至高頻、中/大舵角Z形操舵時,其誤差是不言而喻的[13]。為使模型能夠更逼真地反映船舶的運動狀態響應,選用一階非線性響應模型(2)[14],并引入非線性系數α。
將模型(2)離散化后得到:

其中:z(k+2)=ψ(k+2)-ψ(k+1);取 K=1,2,3,…,N-2,N為采樣總數,Δt為采樣周期,經最小二乘遞推算法即可辨識出各模型參數的估計值。
最小二乘遞推算法計算公式[10]為
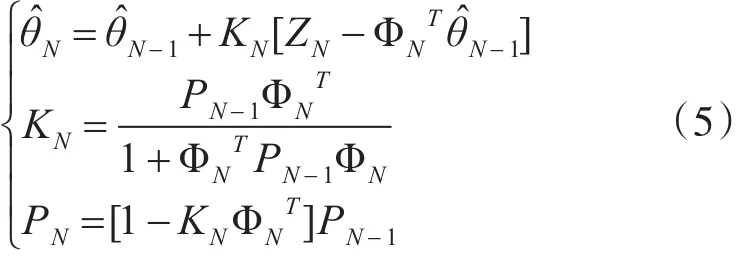
其中,PN-1=(ΦN-1TΦN-1)-1,θ?N表示 N 次觀測的最小二乘估計量,ZN為觀測矩陣和ΦN為數據矩陣。
3.3 分步數據處理法
由于辨識技術的固有缺陷,當使用最小二乘方法同時辨識較多參數時,存在所謂的“參數相消效應”[5],即所辨識參數同時偏離各自真值。文獻[5]提出了一種分步數據處理法,即通過設計一組試驗,采用不同的試驗方式,分步辨識各參數,使一次同時辨識的參數盡可能少。方法步驟如下:
第一步:利用小舵角Z形試驗辨識非線性模型(2)時,由于運動幅度小,α 屬于不敏感系數[8],其辨識結果不可靠,故可暫不考慮非線性系數α,而選用一階線性模型(1),利用δ=5°的定常回轉試驗[12]結果,根據艏向角速度(即斜率值)和對應的舵角求各采樣段K和δr的均值,先辨識出K和δr。
第二步:將辨識得到的K和δr視作已知量,利用Z10°10°試驗結果對線性模型(1)進行最小二乘辨識,得到T。
第三步:繼之,將K、T、δr視作已知量,利用Z20°20°試驗對非線性模型(2)進行最小二乘辨識,得到α。此時由于運動幅度大,非線性嚴重,α屬于敏感系數,此時有較高的辨識精度[8]。
第四步:利用Z15°15°的操舵響應試驗,對所獲數學模型進行校驗。
4 辨識結果與分析
4.1 實船試驗與獲取數據
在一級海況下進行無人艇定常回轉試驗,試驗截圖如圖2,舵角穩定在5°左右,航速保持在10kn左右,得到回轉試驗采樣點數據,采樣時間0.5s。由于記錄的實時數據較多,在這里只列出首圈采樣點數據見表1。
圖2 無人艇回轉試驗界面截圖
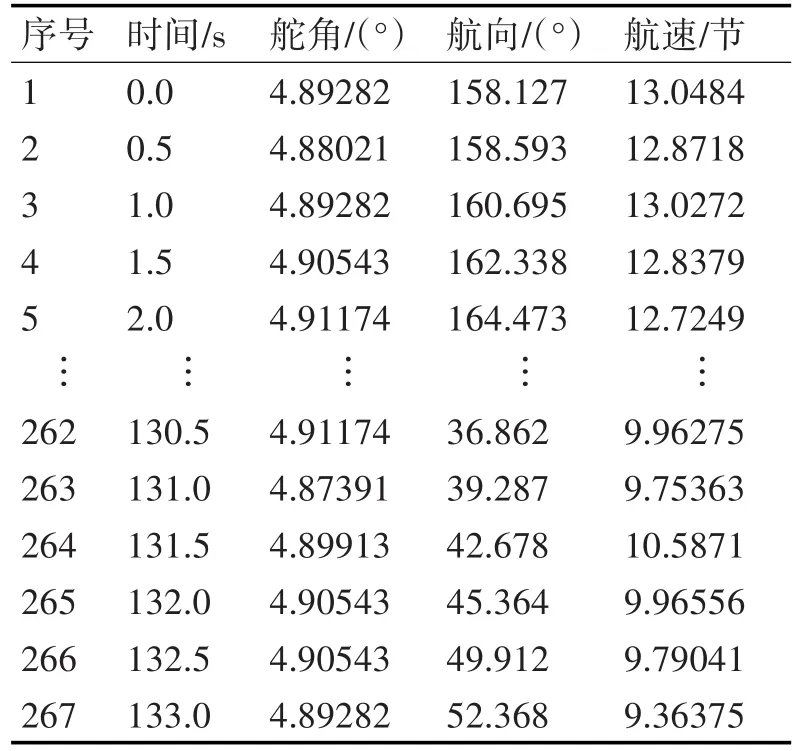
表1 回轉試驗的首圈采樣點數據表格
在同等海況條件下,對無人艇分別進行Z20°20°、Z10°10°、Z15°15°操舵試驗,試驗截圖如圖3,航速保持在10kn左右,由于記錄的實時數據較多,在這里只列出Z15°15°首次操舵指令采樣點數據見表2。
圖3 無人艇z形試驗界面截圖

表2 z形試驗首次操舵指令采樣點數據表格
4.2 模型參數辨識結果
1)野本標準法
對于線性方程(1),通過改進的野本Z形操縱試驗法辨識得到δ-t和ψ-t擬合特征曲線如圖4,圖解分析后可得各特征參數平均值K=1.0178,T=5.1561,δr=0.054。
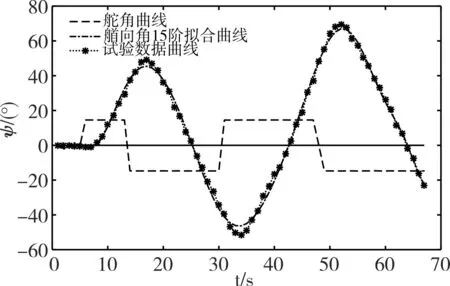
圖4 Z15°15°的δ-t和ψ-t擬合特征曲線
2)最小二乘遞推算法
對于非線性模型(2),進行 Z10°10°試驗,經過辨識得到 K=0.6178,T=3.596,舵角誤差δr=0.0073,α=0.0192。 Z10°10°時的參數估計收斂曲線如圖5。
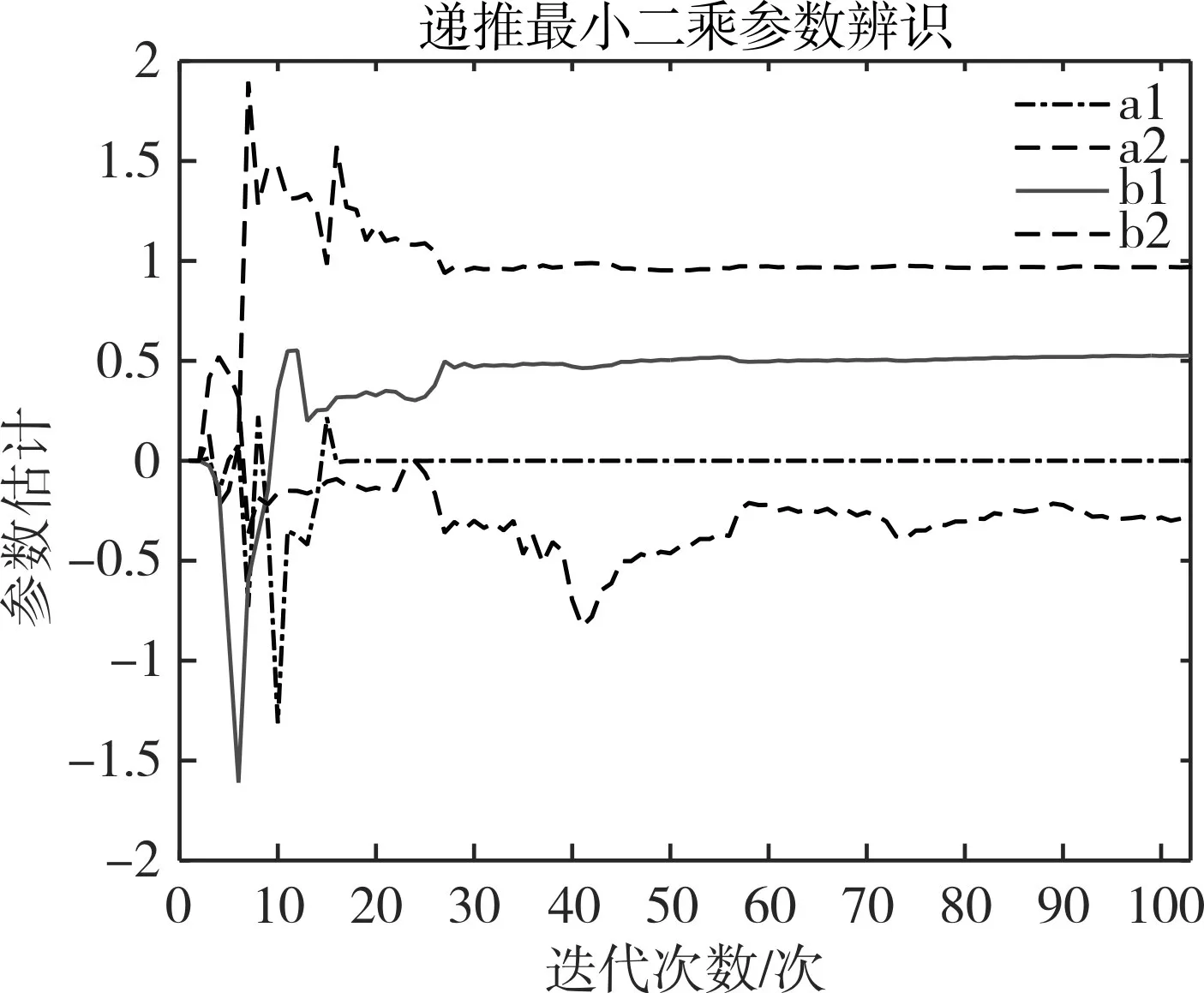
圖5 Z10°10°參數估計收斂曲線
3)分步數據處理法
首先針對線性模型(1),進行δ=5°的定常回轉試驗,去除奇異值后舵角與艏向角試驗曲線如圖6左半邊,截取中間一段,得到對應的舵角與艏向角試驗曲線如圖6右半邊,辨識得到K=0.5598,δr=0.0082;再通過Z10°10°試驗經最小二乘得到T=3.5561;然后固定上述K、δr、T值,帶入非線性模型(1),利用Z20°20°試驗辨識得到非線性系數α=0.0242。

圖6 δ=5°試驗舵角與艏向角的關系
4.3 辨識結果分析
利用上述三種辨識結果建立對應的一階模型并進行Z15°15°仿真實驗,可得到相應的艏向角預報曲線和實船操舵響應試驗的擬合曲線,如圖7所示。
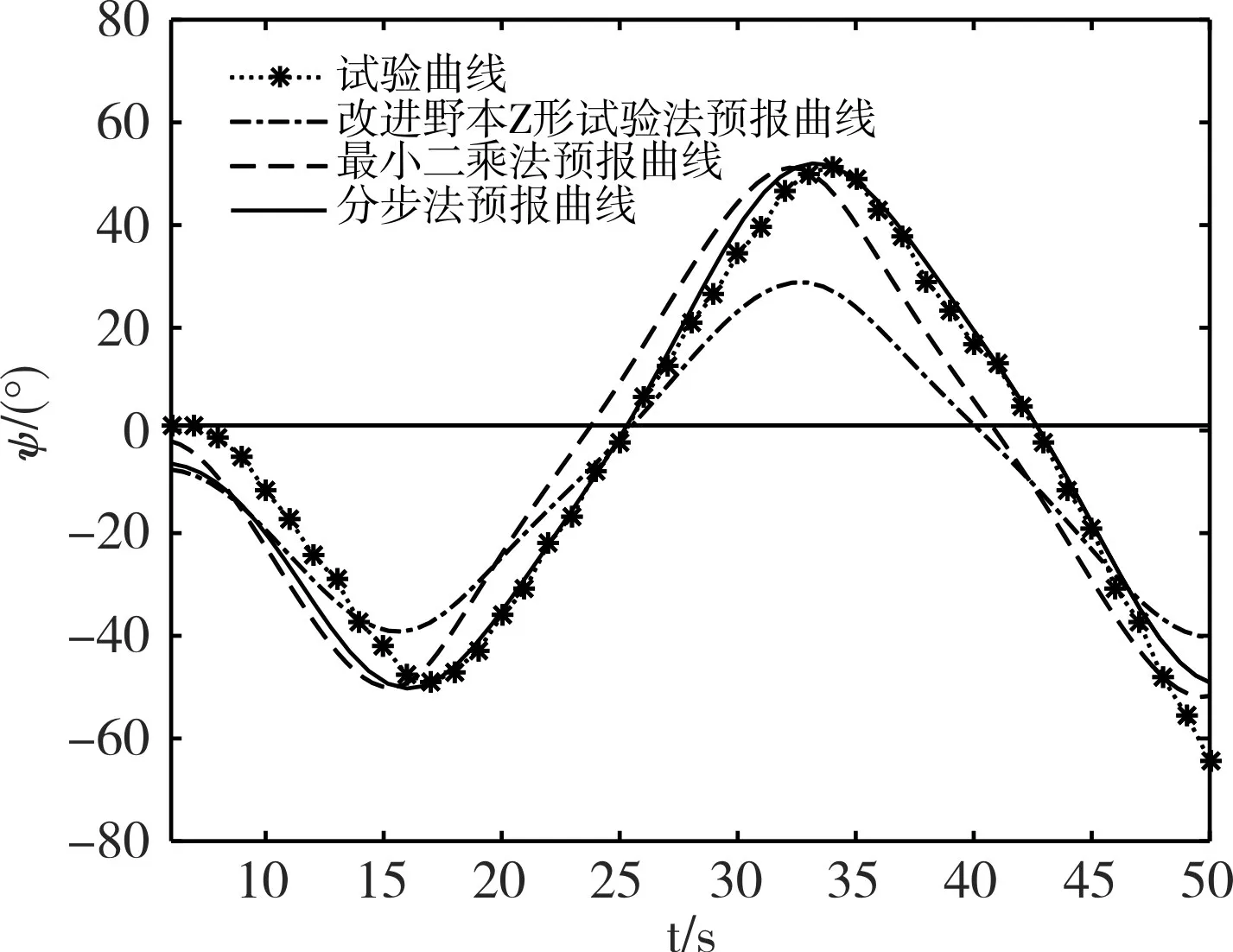
圖7 Z15°15°的操舵響應試驗對比圖
再分別用上述三種辨識結果所建立的一階模型,進行δ=10°的定常回轉仿真實驗,可得到航速10kn時的轉艏角速度試驗擬合曲線和三種方法的轉艏角速度預報曲線,如圖8所示。
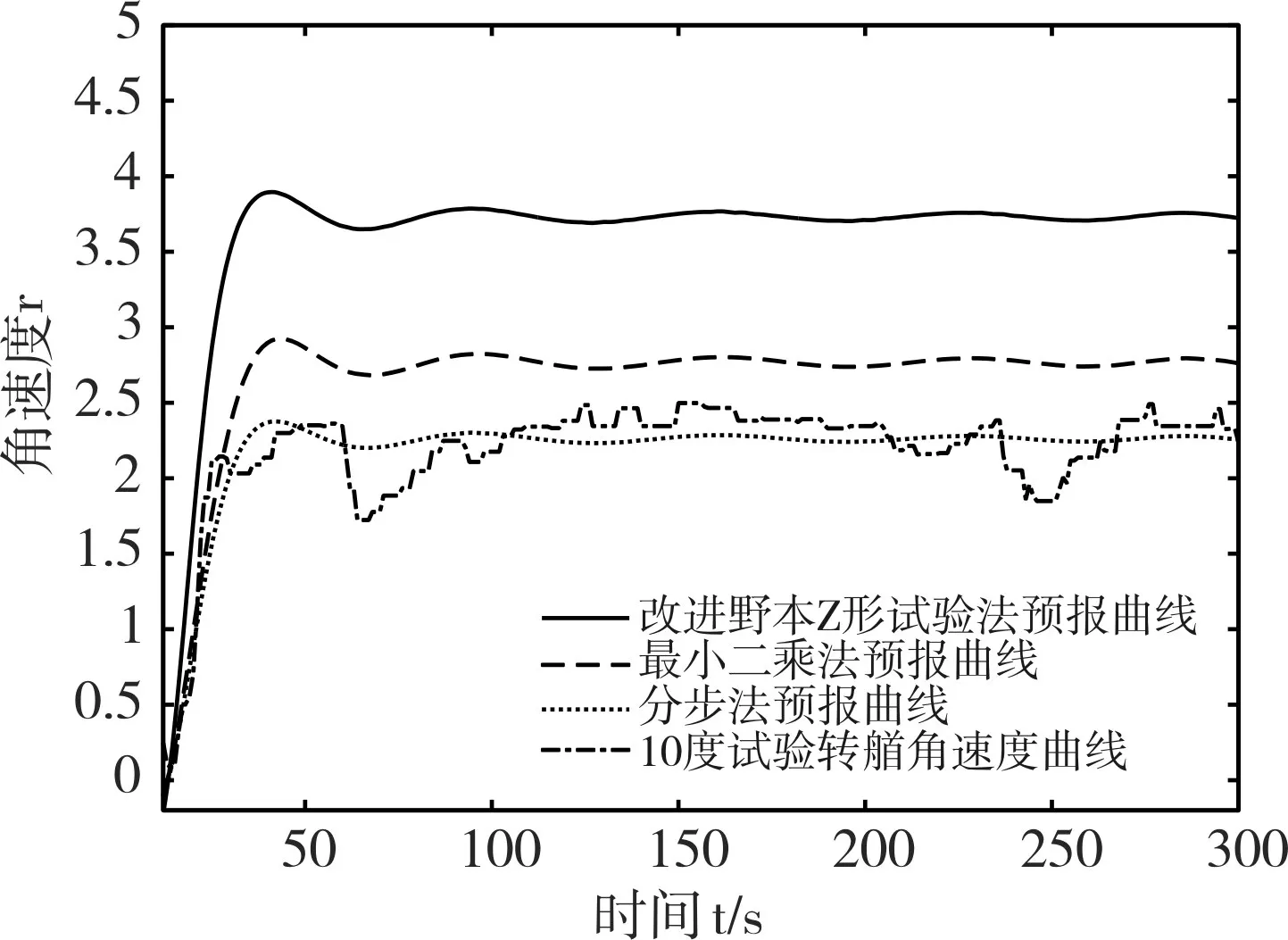
圖8 δ=10°的定常回轉試驗對比圖
由對比圖7和8可知,采用分步辨識策略的擬合效果要優于采用野本標準法和最小二乘遞推算法的擬合值。野本標準法選用的模型和方法簡單,便于實現,在操縱性研究領域仍在廣泛使用,但此方法僅利用Z形試驗曲線上的幾個特征點擬合K、T參數,不能保證由這組參數得到的仿真模型能夠與所有試驗點均良好吻合。利用最小二乘遞推算法進行參數辨識時,若同時辨識的參數過多,會存在所謂的“參數相消效應”[11],也難以達到滿意的非線性辨識結果。通過分步辨識策略[8],通過常規的操縱性試驗便可完成辨識任務,并且組合試驗方式愈多,提供的信息也多,最終的辨識效果就愈好。相較于通過Clarke總結出的10個線性流體動力學導數回歸公式[4]計算船舶操縱性指數而言,降低了復雜性,對試驗技術要求較低。有選擇的采用非線性模型進行辨識,可以更好地描述操縱運動特性,具有較寬的適用范圍,能有效提高USV響應模型的辨識精度。
5 結語
本文以無人水面艇為研究對象建立了船舶操縱響應模型,分別利用野本標準法、最小二乘遞推算法、分步數據處理法對模型參數進行辨識,并以此為基礎設計了多組試驗,通過實船試驗和仿真對比分析,證明了分步數據處理法能夠有效辨識模型參數,并具備更高的辨識精度。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國船檢(2017年3期)2017-05-18 11:33:09
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
