基于無(wú)刷電機(jī)的EPS控制器設(shè)計(jì)
2019-02-27 00:48:00管東方曲寶軍李洪強(qiáng)
管東方,曲寶軍,張 璐,李洪強(qiáng),劉 聰
(山東理工大學(xué) 電氣與電子工程學(xué)院,山東 淄博 255049)
EPS系統(tǒng)是電動(dòng)汽車設(shè)計(jì)裝配過(guò)程中的關(guān)鍵部件之一,直接通過(guò)電動(dòng)機(jī)對(duì)駕駛員提供不同工況下的助力,而且噪聲、廢棄物污染小,目前國(guó)內(nèi)外很多車型已經(jīng)配備EPS系統(tǒng)[1]。電動(dòng)助力轉(zhuǎn)向的性能主要由兩方面決定:一方面是助力特性曲線[2],良好的助力特性曲線可以給駕駛員帶來(lái)較好的路感,另一方面是系統(tǒng)的整體控制策略,魯棒性較好的控制策略可以提高助力電機(jī)電流的跟隨性,改善轉(zhuǎn)向系統(tǒng)的動(dòng)態(tài)性能[3]。
EPS系統(tǒng)在運(yùn)行過(guò)程中的工況復(fù)雜多變,傳統(tǒng)的控制策略難以協(xié)調(diào)不同工況下的運(yùn)行需求[4]。在汽車行駛過(guò)程中駕駛員的轉(zhuǎn)向操控對(duì)助力的控制要求相對(duì)較高[5],EPS系統(tǒng)根據(jù)行駛狀況提供不同的助力會(huì)獲得較好的控制效果[6]。本文針對(duì) EPS 系統(tǒng)的助力特性,設(shè)計(jì)了基于無(wú)刷電機(jī)的控制策略[7]。
1 EPS系統(tǒng)工作原理概述
EPS系統(tǒng)的結(jié)構(gòu)如圖1所示,其在原有的機(jī)械轉(zhuǎn)向系統(tǒng)上加裝了轉(zhuǎn)角、轉(zhuǎn)矩傳感器等眾多的信號(hào)采集裝置。駕駛員在對(duì)汽車進(jìn)行操控的同時(shí),EPS系統(tǒng)實(shí)時(shí)分析計(jì)算傳感器回傳的車速、轉(zhuǎn)矩和轉(zhuǎn)角,控制器根據(jù)傳感器信號(hào)決定助力的方向與大小,用以改善駕駛員在駕駛過(guò)程中的路感。電流傳感器串聯(lián)在直流無(wú)刷電機(jī)的電樞回路中,通過(guò)電流傳感器回傳的電流值,控制芯片完成電流的閉環(huán)控制。

圖1 EPS系統(tǒng)結(jié)構(gòu)簡(jiǎn)圖Fig.1 EPS system structure diagram
2 EPS系統(tǒng)控制策略及助力特性設(shè)計(jì)
2.1 EPS系統(tǒng)整體控制策略
EPS系統(tǒng)是根據(jù)原有的機(jī)械轉(zhuǎn)向系統(tǒng)增加了電子控制單元,依靠車速、方向盤轉(zhuǎn)矩及轉(zhuǎn)角等各個(gè)傳感器信號(hào)來(lái)判斷當(dāng)前汽車所處的工況,通過(guò)執(zhí)行機(jī)構(gòu)來(lái)幫助駕駛員較為輕便地實(shí)現(xiàn)汽車轉(zhuǎn)向。為實(shí)現(xiàn)EPS系統(tǒng)對(duì)轉(zhuǎn)矩的控制,必須控制直流無(wú)刷電機(jī)的母線電流,而對(duì)直流無(wú)刷電機(jī)的控制是根據(jù)3個(gè)霍爾式傳感器返回的位置信號(hào)來(lái)實(shí)現(xiàn)的。調(diào)整三相橋式逆變電路PWM的占空比,控制無(wú)刷電機(jī)電流的大小。
EPS系統(tǒng)的3種基本工況為助力控制模式、阻尼控制模式和回正控制模式,其中阻尼控制模式與回正控制模式都是基于傳統(tǒng)助力控制模式進(jìn)行開(kāi)發(fā)研究的,本文主要研究助力控制模式。
2.2 助力控制策略
在不同車速下助力電機(jī)提供不同的轉(zhuǎn)向助力,一般車速越快,助力電機(jī)提供的轉(zhuǎn)向助力越小。由于傳統(tǒng)的PID控制在時(shí)變、非線性等方面存在很多不足,本文通過(guò)對(duì)無(wú)刷電機(jī)的電流進(jìn)行閉環(huán)控制,間接實(shí)現(xiàn)對(duì)助力轉(zhuǎn)矩的控制。微處理器根據(jù)目標(biāo)電流與實(shí)際電流的差值進(jìn)行調(diào)節(jié),將結(jié)果以PWM占空比的形式經(jīng)過(guò)預(yù)驅(qū)動(dòng)電路送至三相橋式逆變電路,三相橋式逆變電路對(duì)無(wú)刷電機(jī)的轉(zhuǎn)矩進(jìn)行控制,實(shí)現(xiàn)本文EPS系統(tǒng)對(duì)助力工況的控制要求。EPS系統(tǒng)控制策略如圖2所示。
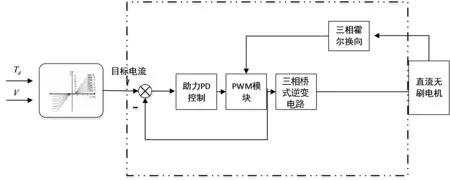
圖2 EPS助力控制策略Fig.2 EPS power control strategy
2.3 助力特性曲線的選取
助力特性曲線是指轉(zhuǎn)向盤轉(zhuǎn)矩與助力轉(zhuǎn)矩的關(guān)系。一般來(lái)講,電動(dòng)助力轉(zhuǎn)向的助力特性曲線一般可以概括為3種:直線型、折線型和曲線型,如圖3所示。
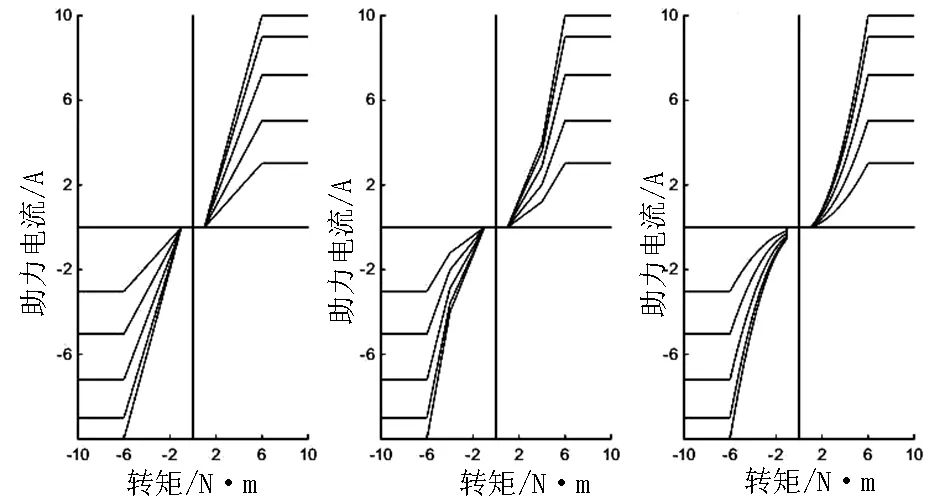
(a)直線型 (b)折線型 (c)曲線型圖3 3種助力特性曲線Fig.3 Three kinds of boost characteristics
雖然直線型助力曲線形式比較簡(jiǎn)單,容易調(diào)節(jié),但不容易滿足路況比較苛刻的路感要求,而曲線型助力需求的運(yùn)算量相當(dāng)大,對(duì)單片機(jī)造成很大的運(yùn)算負(fù)擔(dān),目前曲線助力只停留在仿真階段。為了便于單片機(jī)計(jì)算且保持控制策略的靈活性,采用折線型助力曲線。折線型助力特性曲線如圖4所示。
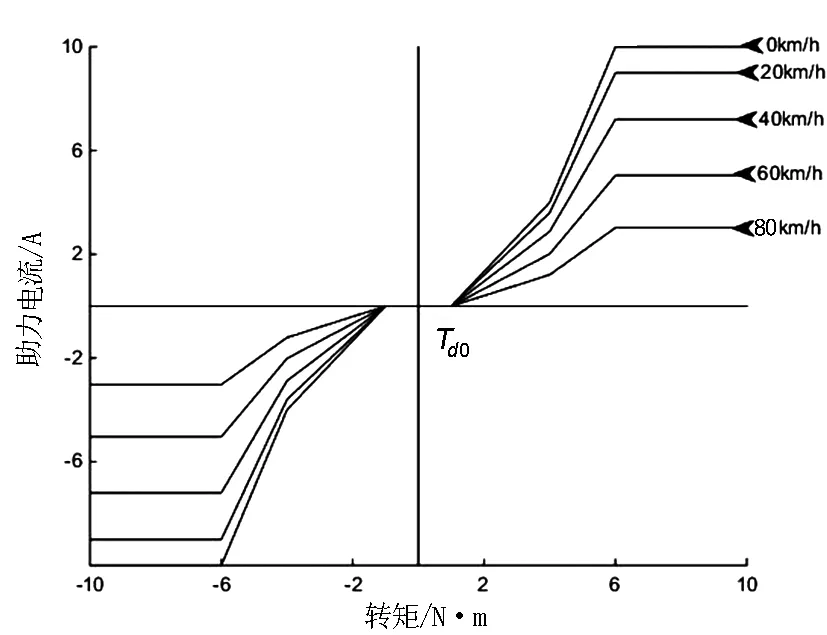
圖4 折線型助力特性曲線Fig.4 Polyline characteristic chart
2.4 助力特性參數(shù)匹配
以折線型助力曲線為例,整定各個(gè)助力特性參數(shù),助力特性需要確定以下4個(gè)參數(shù):
1)起始助力轉(zhuǎn)向盤輸入轉(zhuǎn)矩Td0
為了便于駕駛員控制,當(dāng)方向盤上的轉(zhuǎn)矩小于某一定值時(shí),助力電機(jī)不提供助力轉(zhuǎn)矩,否則會(huì)造成轉(zhuǎn)向過(guò)于靈敏,一般取Td0=1 N·m。
2)轉(zhuǎn)向盤的最大輸入轉(zhuǎn)矩Tdmax
對(duì)于轉(zhuǎn)向盤的最大輸入轉(zhuǎn)矩,由于駕駛員對(duì)轉(zhuǎn)向盤的最大力矩有不同的要求,而國(guó)家標(biāo)準(zhǔn)規(guī)定轉(zhuǎn)向盤的最大切向力不能大于50 N,為便于駕駛員輕松駕駛,轉(zhuǎn)向盤的最大輸入力矩一般需遠(yuǎn)小于50 N,結(jié)合實(shí)際經(jīng)驗(yàn),最大輸入力矩取Tdmax=7 N·m。
3)最大助力電流Imax
由于汽車助力不能無(wú)限制大,故存在助力電機(jī)所能提供的最大助力電流。當(dāng)汽車在原地進(jìn)行轉(zhuǎn)向時(shí)所需要的助力力矩最大。其中汽車原地轉(zhuǎn)向的最大阻力矩Trmax的經(jīng)驗(yàn)公式為
(1)
式中:f為輪胎與路面的滑動(dòng)摩擦系數(shù),一般取0.7,接近實(shí)際生活中的路面摩擦系數(shù);G為前軸負(fù)荷;P為輪胎氣壓,由于本文設(shè)計(jì)的管柱式電動(dòng)助力轉(zhuǎn)向系統(tǒng)適用于中小型汽車,一般轎車重量在1 000~1500 kg之間,并且前輪負(fù)荷一般在車重的55%以上,取前軸負(fù)荷為G= 800 kg,輪胎的氣壓隨路況的不同會(huì)有浮動(dòng),一般在220~250 kPa左右浮動(dòng),計(jì)算時(shí)取230 kPa,由式(1)可得Trmax= 348.3 N·m。
無(wú)刷電機(jī)的最大輸出轉(zhuǎn)矩為
(2)
式中:im為電機(jī)減速機(jī)構(gòu)傳動(dòng)比;ηm為減速機(jī)構(gòu)傳動(dòng)效率;ηr為齒輪齒條轉(zhuǎn)向器正向傳動(dòng)效率;gt為轉(zhuǎn)向橫拉桿到轉(zhuǎn)向輪主銷之間的傳動(dòng)比;gr為齒輪齒條轉(zhuǎn)向器傳動(dòng)比。本文電機(jī)im=16,gr=20,取ηm、ηr、gt為1,則計(jì)算可得Tmmax= 0.65 N·m。
助力電機(jī)的最大助力電流為
Imax=Tmmax/Ki
(3)
式中:Ki代表電機(jī)的轉(zhuǎn)矩系數(shù),本文根據(jù)實(shí)際生產(chǎn)經(jīng)驗(yàn)取值。
由式(3)計(jì)算得Imax=9.5 A,留有一定的余量,本文選取的控制電機(jī)Imax=20 A。
4)車速系數(shù)
由上述確定的3個(gè)參數(shù)可以制定出汽車的最大助力曲線,當(dāng)汽車在原地轉(zhuǎn)向時(shí)阻力較大,需要助力電機(jī)提供的助力較大, 當(dāng)車速增大時(shí),若還繼續(xù)保持原有的助力關(guān)系,會(huì)出現(xiàn)方向盤“發(fā)飄”的情況,故需要適當(dāng)減小助力。目前仍然沒(méi)有確定車速系數(shù)的具體方法,且對(duì)于已經(jīng)調(diào)試好的車速系數(shù)來(lái)說(shuō),不同的車型和對(duì)于不同路感要求的車來(lái)說(shuō)并不一定適用。本文試驗(yàn)從0 km/h開(kāi)始,以20 km/h為間隔選取5個(gè)特性車速進(jìn)行實(shí)驗(yàn),其他車速下的車速系數(shù)根據(jù)相鄰特征車速進(jìn)行線性插補(bǔ)或擬合獲得。
3 控制器的設(shè)計(jì)
本文選取微處理器TMS320F2811開(kāi)發(fā)直流無(wú)刷電機(jī)EPS系統(tǒng)。以TMS320F2811為最小系統(tǒng),設(shè)計(jì)了電源電路、三相橋式逆變無(wú)刷電機(jī)驅(qū)動(dòng)電路、信號(hào)調(diào)理電路、點(diǎn)火開(kāi)關(guān)和霍爾信號(hào)采集電路等,同時(shí)在電路安全設(shè)計(jì)方面加入電機(jī)過(guò)流、過(guò)壓保護(hù)以及報(bào)警功能。
3.1 逆變橋電路設(shè)計(jì)
無(wú)刷電機(jī)采用電子換向,具有與直流有刷電機(jī)一樣優(yōu)良的調(diào)速性能,本文采用了比較容易實(shí)現(xiàn)且具有較高控制精度的轉(zhuǎn)矩直接控制,采用PWM脈寬調(diào)制技術(shù),通過(guò)對(duì)EPS系統(tǒng)的控制策略確定占空比來(lái)控制無(wú)刷電機(jī)輸出的轉(zhuǎn)矩,本文從無(wú)刷電機(jī)的三相橋式逆變電路和控制策略方面進(jìn)行優(yōu)化。
一般采用霍爾傳感器實(shí)時(shí)檢測(cè)無(wú)刷電機(jī)的位置,其優(yōu)勢(shì)在于減小轉(zhuǎn)矩波動(dòng),改善助力特性。考慮到無(wú)刷電機(jī)的控制器一般采用三相逆變橋驅(qū)動(dòng),本文設(shè)計(jì)的帶母線電流傳感器的全橋逆變電路如圖5所示。

圖5 帶母線電流傳感器的全橋逆變電路Fig.5 Full bridge inverter circuit with bus current sensor
圖5中,Q1—Q6為功率MOS管IRF80N04,R1—R6為柵極驅(qū)動(dòng)電阻,R7—R10為柵極下拉電阻,R13為精密采樣電阻,s1—s6為經(jīng)過(guò)功率放大后的PWM信號(hào),U1為母線電流信號(hào)放大元件,控制器根據(jù)母線電流信號(hào)進(jìn)行轉(zhuǎn)矩的閉環(huán)控制。
其中驅(qū)動(dòng)控制芯片A3935具有優(yōu)良的故障自診斷功能:當(dāng)出現(xiàn)電源短路、三相橋式逆變開(kāi)路、電源過(guò)壓或欠壓等狀況及時(shí)反饋給控制系統(tǒng),處理器根據(jù)驅(qū)動(dòng)芯片回傳的故障代碼及時(shí)判定故障類型,發(fā)出相應(yīng)的報(bào)警,并及時(shí)切斷PWM模塊信號(hào),阻止問(wèn)題的進(jìn)一步發(fā)生。
3.2 控制器控制流程設(shè)計(jì)
控制系統(tǒng)的軟件由中斷服務(wù)函數(shù)與主程序構(gòu)成。主程序完成的工作有各個(gè)I/O寄存器的配置、相關(guān)寄存器的初始化、脈沖驅(qū)動(dòng)信號(hào)的計(jì)算與輸出、各個(gè)I/O狀態(tài)監(jiān)控和信號(hào)高速采集等功能;其中中斷服務(wù)子函數(shù)包括ADC采集、主副轉(zhuǎn)矩占空比采集、hall信號(hào)輸入捕獲與脈沖信號(hào)的采集。
結(jié)合上述分析,針對(duì)EPS系統(tǒng)的特點(diǎn),結(jié)合數(shù)字式PID控制器,對(duì)EPS整體的控制流程分析如圖6所示。

圖6 主程序控制流程Fig.6 Main program control flow
4 實(shí)驗(yàn)
本文設(shè)計(jì)的控制器在車輛EPS系統(tǒng)試驗(yàn)臺(tái)架上進(jìn)行。EPS實(shí)驗(yàn)臺(tái)架主要包括臺(tái)架、助力電機(jī)控制系統(tǒng)、磁粉制動(dòng)器以及信號(hào)采樣分析系統(tǒng)4個(gè)部分。磁粉制動(dòng)器方便模擬不同路況下的路面狀況,如圖7所示。

圖7 電動(dòng)助力轉(zhuǎn)向系統(tǒng)試驗(yàn)臺(tái)架Fig.7 Test bench of electric power assisted steering system
本文控制器以TMS320F2811最小系統(tǒng)為核心,設(shè)計(jì)了信號(hào)的采樣調(diào)理電路,主要采集的信號(hào)有轉(zhuǎn)矩、車速、電機(jī)母線電流、霍爾傳感器的位置信號(hào)以及其他的開(kāi)關(guān)信號(hào);選用的汽車級(jí)芯片A3935具有過(guò)壓、過(guò)流保護(hù)功能,以及故障自診斷功能。
為驗(yàn)證控制策略的有效性,將控制器在電動(dòng)助力轉(zhuǎn)向的試驗(yàn)臺(tái)上進(jìn)行了輸入/輸出轉(zhuǎn)矩試驗(yàn)和輸入轉(zhuǎn)角/輸入轉(zhuǎn)矩試驗(yàn),輸入/輸出特性曲線如圖8所示,記錄了在試驗(yàn)臺(tái)架上0 km/h、20 km/h、40 km/h、60 km/h和80 km/h 5個(gè)車速下輸入轉(zhuǎn)矩與輸出轉(zhuǎn)矩的關(guān)系。由圖8可知,各個(gè)速度下的輸入、輸出特性曲線對(duì)稱性良好,且車速信號(hào)越大,助力電機(jī)輸出的助力轉(zhuǎn)矩降低,滿足實(shí)驗(yàn)要求。

圖8 輸入/輸出特性曲線Fig.8 Input/output characteristic curves
圖9為 60 km/h車速下轉(zhuǎn)向盤轉(zhuǎn)矩曲線圖。由圖9可知,有電機(jī)助力的汽車轉(zhuǎn)向輕便性相比較于無(wú)助力的有較大提高;當(dāng)轉(zhuǎn)向盤轉(zhuǎn)矩的絕對(duì)值小于一定值時(shí)電機(jī)不提供助力,隨著轉(zhuǎn)向盤轉(zhuǎn)矩超過(guò)臨界值,電機(jī)的助力轉(zhuǎn)矩也隨之增加;且助力電機(jī)助力轉(zhuǎn)矩對(duì)稱性在90%以上,符合電動(dòng)助力轉(zhuǎn)向系統(tǒng)控制要求。

圖9 60 km/h車速下轉(zhuǎn)向盤轉(zhuǎn)矩圖Fig.9 Steering wheel torque diagram at 60 km/h speed
在車速等于60 km/h時(shí)向方向盤施加轉(zhuǎn)向力矩,從而分析助力電機(jī)電流的動(dòng)態(tài)特性如圖10所示。

圖10 60 km/h車速下電機(jī)母線電流變化Fig.10 Steering wheel torque diagram at 60 km/h speed
由圖10可知,有電機(jī)助力與無(wú)電機(jī)助力情況下的母線電流變化,電機(jī)助力能夠明顯降低穩(wěn)態(tài)誤差,相應(yīng)提高響應(yīng)時(shí)間,動(dòng)態(tài)特性較好。
5 結(jié)束語(yǔ)
本文研究了電動(dòng)助力轉(zhuǎn)向系統(tǒng)的助力特性,設(shè)計(jì)了系統(tǒng)整體控制策略,并基于汽車級(jí)芯片A3935設(shè)計(jì)了直流無(wú)刷電機(jī)的三相全橋驅(qū)動(dòng)電路,開(kāi)發(fā)了基于DSP數(shù)字信號(hào)微處理器TMS320F2811的電動(dòng)助力微控制器。在EPS 系統(tǒng)的軟硬件系統(tǒng)設(shè)計(jì)、開(kāi)發(fā)實(shí)驗(yàn)的過(guò)程中,出現(xiàn)了控制單元過(guò)熱等現(xiàn)象。可以采用改變軟件算法來(lái)控制響應(yīng)精度、控制單元與最小系統(tǒng)分離等方法進(jìn)一步提高系統(tǒng)的穩(wěn)定性,對(duì)未來(lái)的EPS系統(tǒng)開(kāi)發(fā)有指導(dǎo)意義。
猜你喜歡
英語(yǔ)世界(2022年9期)2022-10-18 01:11:18
鴨綠江(2021年35期)2021-04-19 12:24:18
能源工程(2020年6期)2021-01-26 00:55:22
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
金橋(2020年9期)2020-10-27 01:59:44
中學(xué)生數(shù)理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
電子制作(2018年11期)2018-08-04 03:25:42
商周刊(2017年17期)2017-09-08 13:08:58
