康復用下肢外骨骼結構設計與仿真
2019-02-23 05:25:28張峻霞張遵浩蘇子懿蘇海龍
天津科技大學學報 2019年1期
張峻霞,李 威,張遵浩,蘇子懿,蘇海龍
(天津市輕工與食品工程機械裝備集成設計與在線監控重點實驗室,天津科技大學機械工程學院,天津 300222)
康復用下肢外骨骼是一種輔助病人站立、行走的雙足裝置[1].在國內外對外骨骼的研究中,Rewalk Robotics公司設計制造的外骨骼用于幫助截癱患者實現獨立行走,工作原理是外骨骼通過檢測患者重心的變化,利用電機的旋轉運動帶動裝置的髖關節和膝關節運動.但是此款外骨骼不能實現無級可調,且價格比較昂貴[2].新西蘭 Rex Bionics公司研制的外骨骼能支撐殘障患者的身體,幫助他們重新站起來.但是裝置的質量高達 38 kg,行走姿勢更像是在地面上滑行而不是真正的著地步行[3].總結國內外幾款典型的外骨骼,均存在以下關鍵技術問題:外骨骼與人體的協調性較差;外骨骼整機質量普遍過重導致使用不便[4–5].
本文在分析人體下肢運動機理的基礎上設計了一款外骨骼.通過使用碳纖維和航空鋁材料大大減輕了裝置質量,使用無級可調機構提高了人機協調性.該裝置既可以作為截癱患者的代步工具,也可以作為腦卒中患者康復訓練的器具.
1 人體下肢運動機理
人行走主要是由下肢髖關節、膝關節和踝關節的運動實現的,其運動器官由骨骼肌、肌腱、關節共同組成.通過附著在骨骼上的骨骼肌的收縮舒張運動,帶動相關骨骼和關節運動,完成行走過程[6].此過程類似于機械原理中的四連桿運動,將人體骨骼肌帶動關節運動與四連桿運動進行類比,如圖1所示.
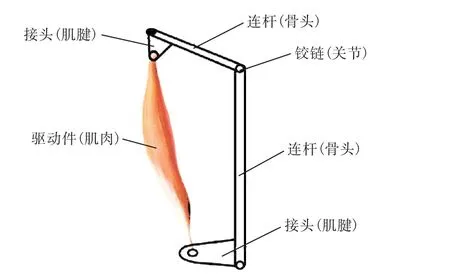
圖1 肌肉驅動原理圖Fig. 1 Muscle driving principle diagram
2 康復用下肢外骨骼整體結構設計
2.1 自由度配置及運動參數采集
在將足部看作一個整體的情況下,人體單側下肢主要有 7個自由度.其中:髖關節有 3個自由度;踝關節有 3個自由度,分別是在矢狀面上繞冠狀軸的屈/伸運動,冠狀面上繞矢狀軸的外展/內收運動,水平面上繞垂直軸的旋內/旋外運動;膝關節有 1個自由度,是在矢狀面上繞冠狀軸的屈/伸運動[7].
考慮腦卒中患者進行康復訓練時的下肢運動主要集中在矢狀面上;人行走需要的力量主要來源于髖關節和膝關節,與下肢矢狀面的自由度相關性最大,故本文設計的外骨骼主要考慮矢狀面上的運動.該裝置在矢狀面內設置髖關節和膝關節為主動自由度,即利用外骨骼髖關節和膝關節的驅動裝置帶動人體髖關節和膝關節運動.踝關節設置為被動自由度,即外骨骼的踝關節隨著人體踝關節運動進行調整,保證人體與外骨骼運動的協調一致.
選用1名身高1.76m,體質量75kg的健康成年男性作為實驗對象.利用Vicon系統采集實驗對象正常行走時的髖關節和膝關節角度變化曲線如圖2所示.根據圖 2中各關節的運動角度數據可以得到:髖關節屈極限為 17°,伸極限為 43°;膝關節屈極限為71°,伸極限為 0°.
2.2 機構設計
在髖關節和膝關節處設計四桿機構實現運動功能.利用安裝在髖關節和膝關節處的驅動裝置產生的直線運動,帶動關節的旋轉運動.人體下肢運動的極限位置見圖3.
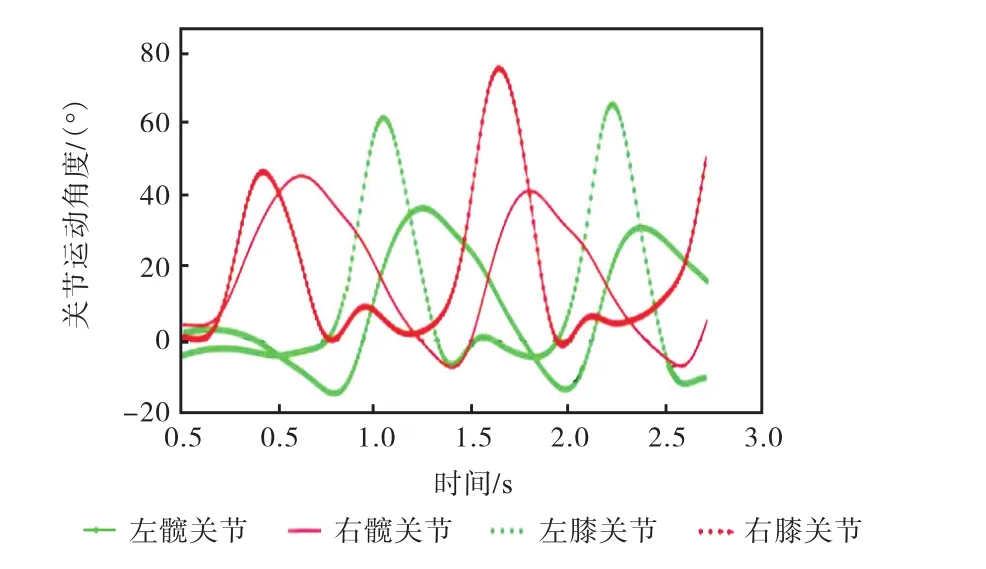
圖2 髖關節和膝關節的運動角度變化圖Fig. 2 Change of hip and knee joint angle
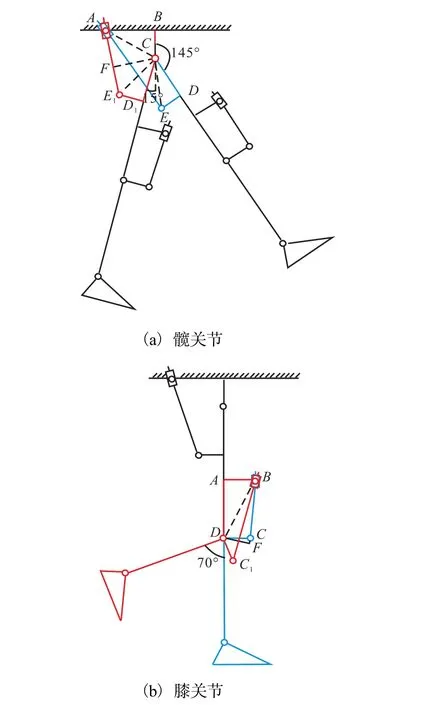
圖3 下肢機構運動極限位置簡圖Fig. 3 Motion limit position of lower limb
結合四桿機構的原理、裝置的運動軌跡和正常人體的尺寸可以確定四桿機構各桿件的長度.分析下肢殘障患者前期恢復步態行走的特點,結合實驗測得人體步態數據,設置外骨骼裝置的髖關節屈極限15°,伸極限 35°;膝關節屈極限 70°,伸極限 0°.利用各關節的極限位置計算滾珠絲杠的行程.髖關節處滾珠絲杠的行程如圖3(a)所示,AE1表示絲杠完全縮回,絲杠安裝位置至絲杠末端的長度.AE表示絲杠伸出一定距離,絲杠安裝位置至絲杠末端的長度.其中,AB=100mm,BC=57mm,CD=CD1=90mm,DE=D1E1=50mm.
當髖關節屈15°時
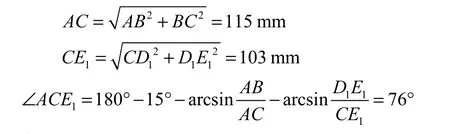
由余弦定理可知

當髖關節伸35°時

由余弦定理可知

故安裝在髖關節處的滾珠絲杠的行程為

膝關節處滾珠絲杠的行程如圖3(b)所示,BC表示絲杠完全縮回時,絲杠安裝位置至絲杠末端的長度.BC1表示絲杠伸出一定距離時,絲杠安裝位置至絲杠末端的長度.

當膝關節與地面垂直,即伸0°時
由余弦定理可知

當膝關節屈70°時

由余弦定理可知

故安裝在膝關節處的滾珠絲杠行程為

2.3 驅動裝置設計
人體下肢運動特性分析表明,人在正常行走過程中,通過骨骼肌直線收縮產生的拉力為各關節提供動力并轉換成關節轉動.故本設計采用伺服電機加滾珠絲杠的直線執行機構,其運動方式與人體下肢骨骼肌肉的運動相近.此方式利用了電機驅動的易于控制、運動響應快、精度高、驅動效率高的特點,而且連續工作制可達到 100%,能提供持續穩定的動力[8].根據滾珠絲杠需要的行程,后續對人穿戴外骨骼模型進行動力學仿真,分析計算后對滾珠絲杠和電機的參數進行選擇.伺服電機的輸入轉矩與滾珠絲杠的推力關系為

式中:T為電機輸入轉矩,N·m;F為滾珠絲杠推力,N;L為滾珠絲杠導程,mm;η為電機到滾珠絲杠的傳動效率.
計算得到能為髖關節和膝關節提供的最大轉矩分別為
式中:Fh表示髖關節處滾珠絲杠的推力;Fk表示膝關節處滾珠絲杠的推力.
2.4 無級可調結構設計及材料選擇
為使外骨骼達到人機高度協調,設計了無級可調結構,即可以根據穿戴者自身尺寸對外骨骼進行調節,保證該裝置最大程度貼合穿戴者.外骨骼腿桿結構(以小腿桿為例)見圖 4,上端碳纖維管和下端碳纖維管均與碳管端部螺紋套用環氧樹脂粘接劑 DP460粘接,碳管端部螺紋套與六方中間桿細牙用螺紋連接,通過旋轉六方中間桿細牙調節桿長達到所需長度,用軸端緊定螺母進行鎖緊.大腿桿長調節方法采用相同原理.該裝置的小腿桿長可調范圍為 324~419mm,大腿桿長可調范圍為 413~523mm,滿足第99百分位人群使用.
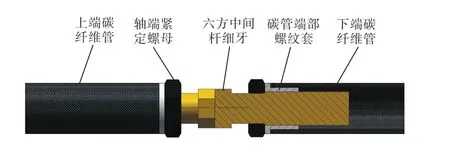
圖4 小腿桿結構Fig. 4 Leg rod structure
使用新材料是實現輕量化設計的重要途徑[9].裝置中除了標準件外,關節處的活動部件采用航空鋁材料,其他部位包括靠背、腰部、大小腿桿、腳板均使用碳纖維材料.航空鋁材料易加工、抗氧化、耐腐蝕.碳纖維材料質量輕、抗拉強度好、壽命長.使用碳纖維和航空鋁材料后,與課題組上一代外骨骼的總質量 30kg相比,減輕了 5kg.建立的外骨骼三維模型如圖5所示,樣機如圖6所示.
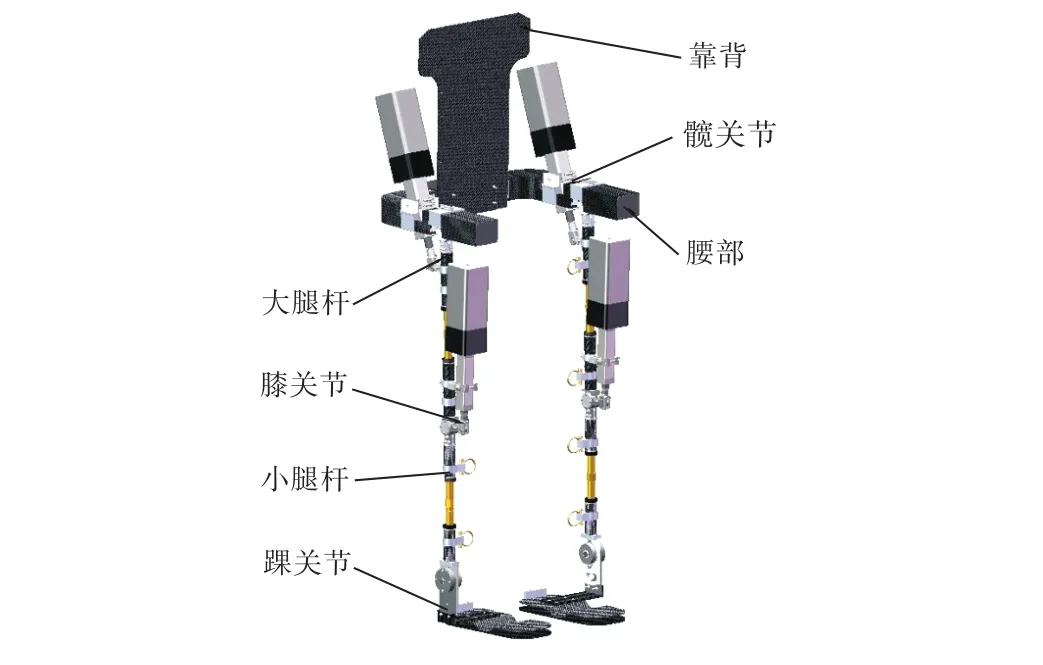
圖5 外骨骼三維模型Fig. 5 3D model of exoskeleton

圖6 外骨骼樣機Fig. 6 Exoskeleton prototype
3 動力學仿真
采用交互式仿真,即運用STEP角位移函數作為驅動函數,驅動髖關節和膝關節在矢狀面轉動,可以逆推出完成給定運動所需驅動力矩,進而確定滾珠絲杠及電機的參數.將建立的人體穿戴外骨骼三維模型簡化后導入ADAMS中,如圖7所示,分別為外骨骼和人體模型設置材料屬性、添加約束和角位移驅動函數.
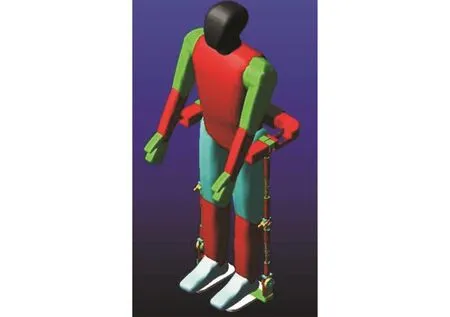
圖7 ADAMS中的人體穿戴外骨骼模型Fig. 7 Model of human wearing exoskeleton in ADAMS
3.1 髖關節和膝關節的運動角度變化分析
將實驗測得的人體步態數據輸入 step驅動函數中,對外骨骼進行仿真.仿真結束進行后處理,輸出髖關節和膝關節的角度、力矩等參數.其中測得人體右髖關節和右膝關節的運動角度變化曲線與裝置仿真曲線見圖8.
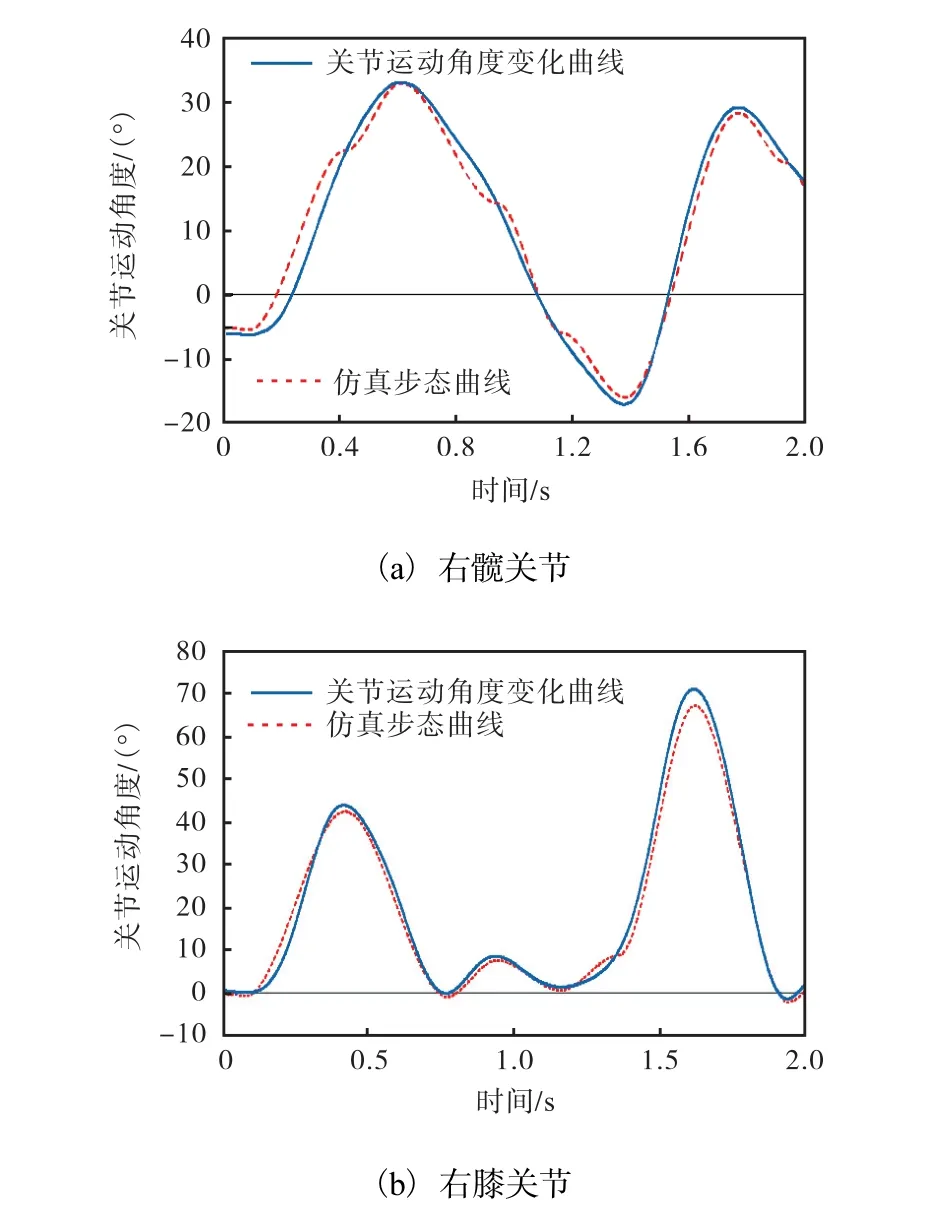
圖8 人體右髖關節和右膝關節的運動角度變化曲線與裝置仿真曲線Fig. 8 Experimental gait curve and the device simulation curve of human right hip joint and knee joint
將實際測量的髖關節和膝關節角度變化曲線與仿真曲線進行對比分析可知,仿真得到的髖關節和膝關節的運動角度范圍均在人的正常運動范圍之內,即穿戴外骨骼的步態曲線與人體正常步態曲線基本一致,人穿戴外骨骼后基本能按照人體步態曲線行走.
3.2 髖關節和膝關節的驅動轉矩變化分析
根據圖9的仿真結果,人體穿戴外骨骼系統在髖關節處產生的最大轉矩為 241N·m,在膝關節處產生的最大轉矩為77N·m.
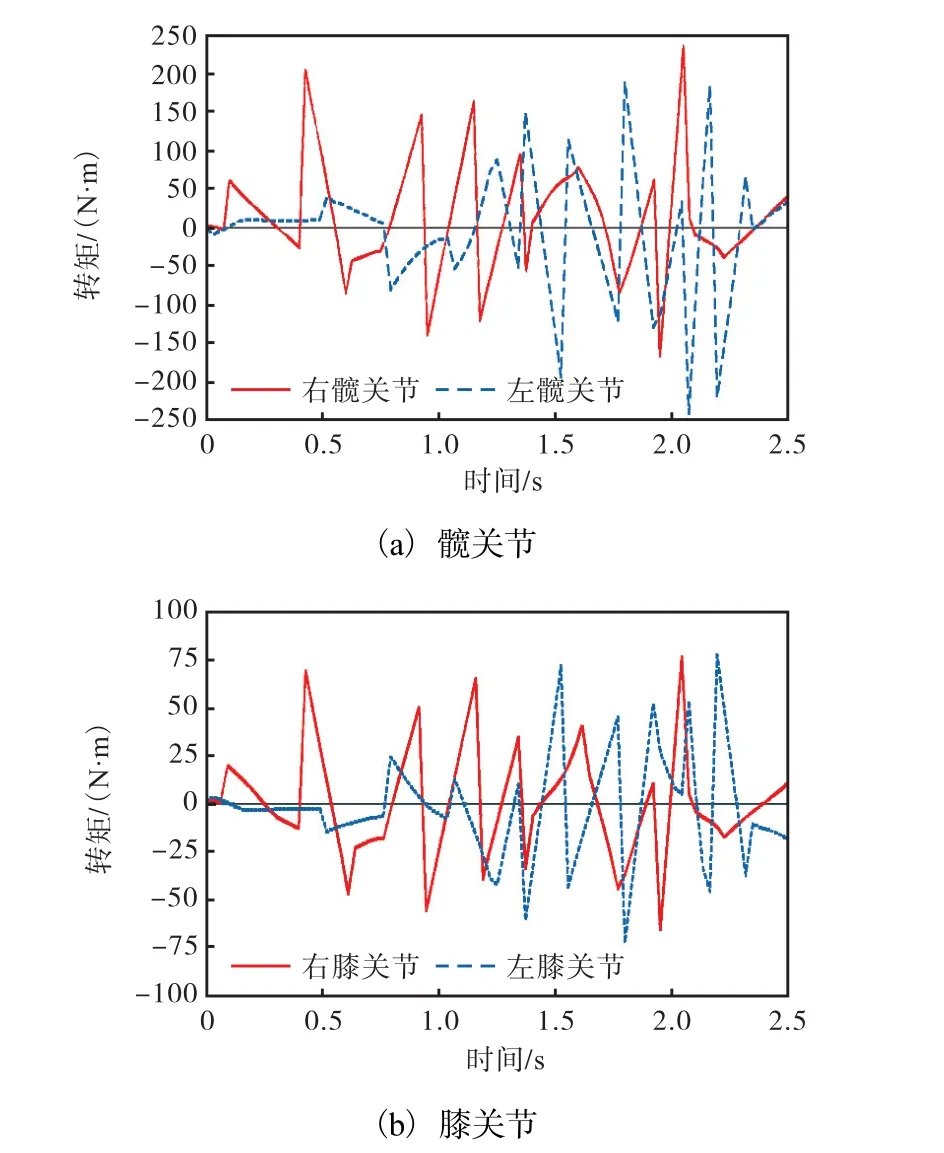
圖9 裝置髖關節和膝關節的轉矩變化曲線Fig. 9 Curve of torque change of hip joint and knee joint in the device
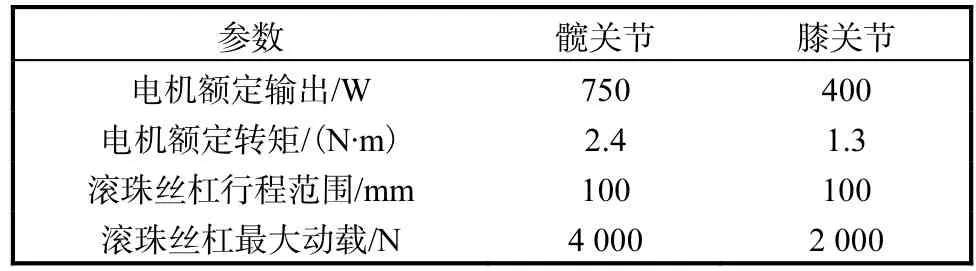
表1 髖關節和膝關節處的動力元件參數Tab. 1 Parameters of dynamic elements of hip joint and knee joint
根據仿真的力矩選擇的髖關節、膝關節動力元件的參數見表 1.通過式(1)—式(3)計算得髖關節處滾珠絲杠最大的推力為 3391.2N,膝關節處滾珠絲杠的最大推力為 1836.9N.兩關節處滾珠絲杠的最大推力均小于所選擇滾珠絲杠的最大動載.髖關節處的驅動裝置提供的最大轉矩為 288.3N·m,膝關節處的驅動裝置提供的最大轉矩為97.5N·m.兩關節處的驅動裝置提供的轉矩均大于人穿戴下肢外骨骼仿真所得的最大轉矩.結果說明選取的驅動裝置滿足人體穿戴下肢外骨骼行走的動力需求.
4 結 語
本文設計了一款六自由度康復用下肢外骨骼,采用無級可調結構的設計滿足第 99百分位人群使用.主要桿件均使用碳纖維或航空鋁材料,減輕了裝置質量.建立動力學模型并用 ADAMS軟件對外骨骼進行動力學仿真,確定了電機與滾珠絲杠的參數.仿真結果表明人穿戴外骨骼能按照人的步態行走.通過有線電源驅動,人穿戴外骨骼樣機進行了行走試驗,驗證了仿真結果的正確性和裝置設計的合理性.
