一種基于CST技術(shù)的機(jī)翼參數(shù)化描述方法
2019-02-19 07:18:00閆博文劉志勤王耀彬
導(dǎo)彈與航天運載技術(shù) 2019年1期
關(guān)鍵詞:方法
閆博文,黃 俊,劉志勤,王耀彬
(西南科技大學(xué),綿陽,621000)
0 引 言
隨著航空航天科學(xué)技術(shù)的發(fā)展和國防科學(xué)技術(shù)的需求,飛機(jī)的外形設(shè)計越來越成為國防科技的關(guān)注重點。機(jī)翼是構(gòu)成飛機(jī)整體結(jié)構(gòu)的重要部件之一,它使飛機(jī)能夠獲得升力從而保持飛行,故而翼型性能對飛行器整體的氣動性能有著重要的影響,需要采用恰當(dāng)?shù)囊硇蛥?shù)化方法來生成所需要的翼型幾何體。
用來進(jìn)行翼型參數(shù)化的方法有很多,比如形函數(shù)線性擾動法,該方法的翼型形狀是由基準(zhǔn)翼型和擾動函數(shù)線性疊加構(gòu)成的[1]。特征參數(shù)描述法則是通過一系列特征參數(shù)來確定解析函數(shù),進(jìn)而得到所求翼型坐標(biāo)的方法[2]。正交基函數(shù)法利用正交基系數(shù)作為翼型設(shè)計的變量,通過正交基函數(shù)描述翼型。但以上方法都具有局限性、計算量大且效率低、設(shè)計變量多且不易控制、誤差大精度低、對初始模型過于依賴等缺點[3]。
Kulfan提出了一種比較優(yōu)秀的外形參數(shù)化方法CST技術(shù),該技術(shù)同時使用類別函數(shù)與形狀函數(shù)來對外形進(jìn)行控制,并對許多翼型進(jìn)行計算,給出了影響形狀函數(shù)的Bernstein多項式的取值范圍,其中類別函數(shù)(Class Function)可以生成幾何圖形的基本外形,再通過形狀函數(shù)(Shape Function)對這個基本的幾何圖形進(jìn)行修正,從而得到需要的幾何圖形。該技術(shù)具有設(shè)計變量少、可調(diào)節(jié)、設(shè)計空間廣等優(yōu)點[4~7]。
本文首先使用CST參數(shù)化方法分別對二、三維機(jī)翼參數(shù)化進(jìn)行復(fù)現(xiàn),然后在原有的CST方法基礎(chǔ)之上提出一種使用分段定義描述翼型的方法,用來解決機(jī)翼外形不連續(xù)變化的情況,最終得到效果良好的三維可控變化機(jī)翼模型。
1 機(jī)翼幾何數(shù)學(xué)描述
典型機(jī)翼的CST方法數(shù)學(xué)表達(dá)式:

式中 ψ為機(jī)翼弦長與x軸坐標(biāo)比值,ψ=xc;ζ(ψ)為翼型厚度與機(jī)翼弦長比值,ζ= z c;ζT為翼型后緣厚度與機(jī)翼弦長比值,c為機(jī)翼弦長,x為機(jī)翼x軸坐標(biāo),z為機(jī)翼z軸坐標(biāo),ΔζTE為翼型后緣相對z軸的坐標(biāo)。可以確保得到圓鼻翼型,(1-ψ)可確保得到一個尖的翼型后緣,∑NA ?ψi決定了翼型前緣到后緣之間的曲線形狀(故而稱其為形狀函數(shù)),ψ?ζT則決定后緣是否封閉(當(dāng)后緣封閉時ψ?ζT為零)。定義形狀函數(shù)為 S (ψ),則式(1)進(jìn)行變形可得:

式中 RLE為翼型前緣半徑;β為翼尾夾角;ΔZTE為翼型后緣厚度。
21(ψ )來表示,則:

部分具有代表性的類函數(shù)如圖1所示。
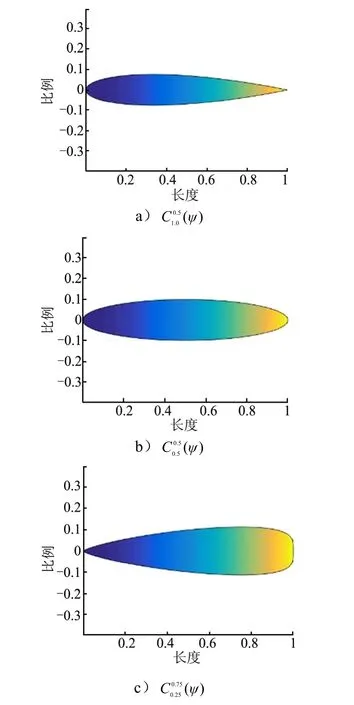
圖1 不同類函數(shù)展示Fig.1 Different Class Function Display
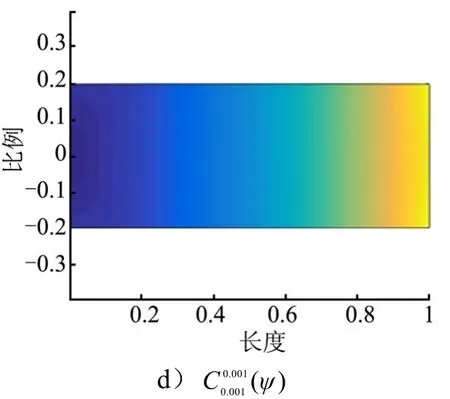
續(xù)圖1
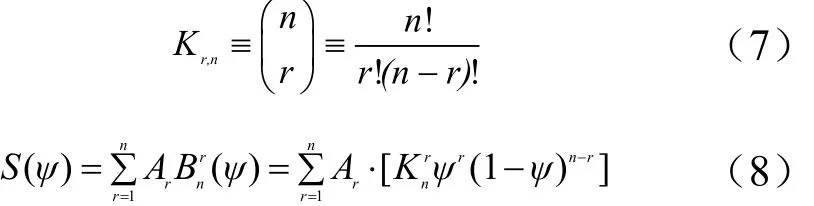
最后得到通用CST數(shù)學(xué)表達(dá)式:

對于式(6)中的形狀函數(shù))(ψS,通常使用n階Bernstein多項式的加權(quán)和來進(jìn)行表示:
CST算法生成Clark-Y二維翼型如圖2所示。

圖2 CST算法生成Clark-Y二維翼型Fig.2 CST Algorithm Generates Clark-Y Two-dimensional Airfoil
2 三維幾何體建模
定義截面形狀函數(shù)cS,以及類函數(shù)cC如下:

定義分布形狀函數(shù)dS,以及類函數(shù)dC如下:

NC、ND為函數(shù)指數(shù),則x,y,z的坐標(biāo)可表示為
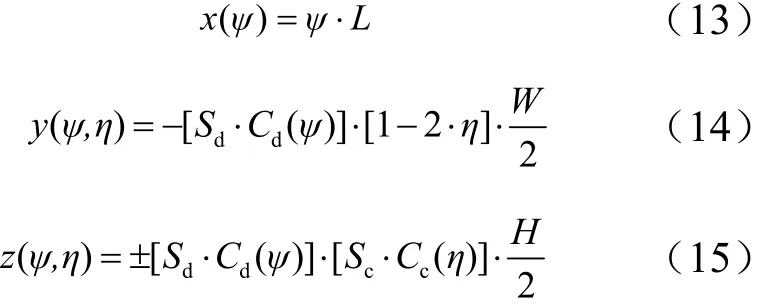
式中 L,W,H分別為長、寬、高。
圖3為三維物體展示。
3 CST分段描述翼型
三維機(jī)翼本質(zhì)上可以看成是二維機(jī)翼的擴(kuò)展,由于機(jī)翼外形不是一成不變的,必須通過每段不同的指數(shù)函數(shù)以及每段各自具有的特征來進(jìn)行控制,因此在擴(kuò)展的時候,需要理解整個機(jī)翼是分段的。圖4為翼型分段描述。
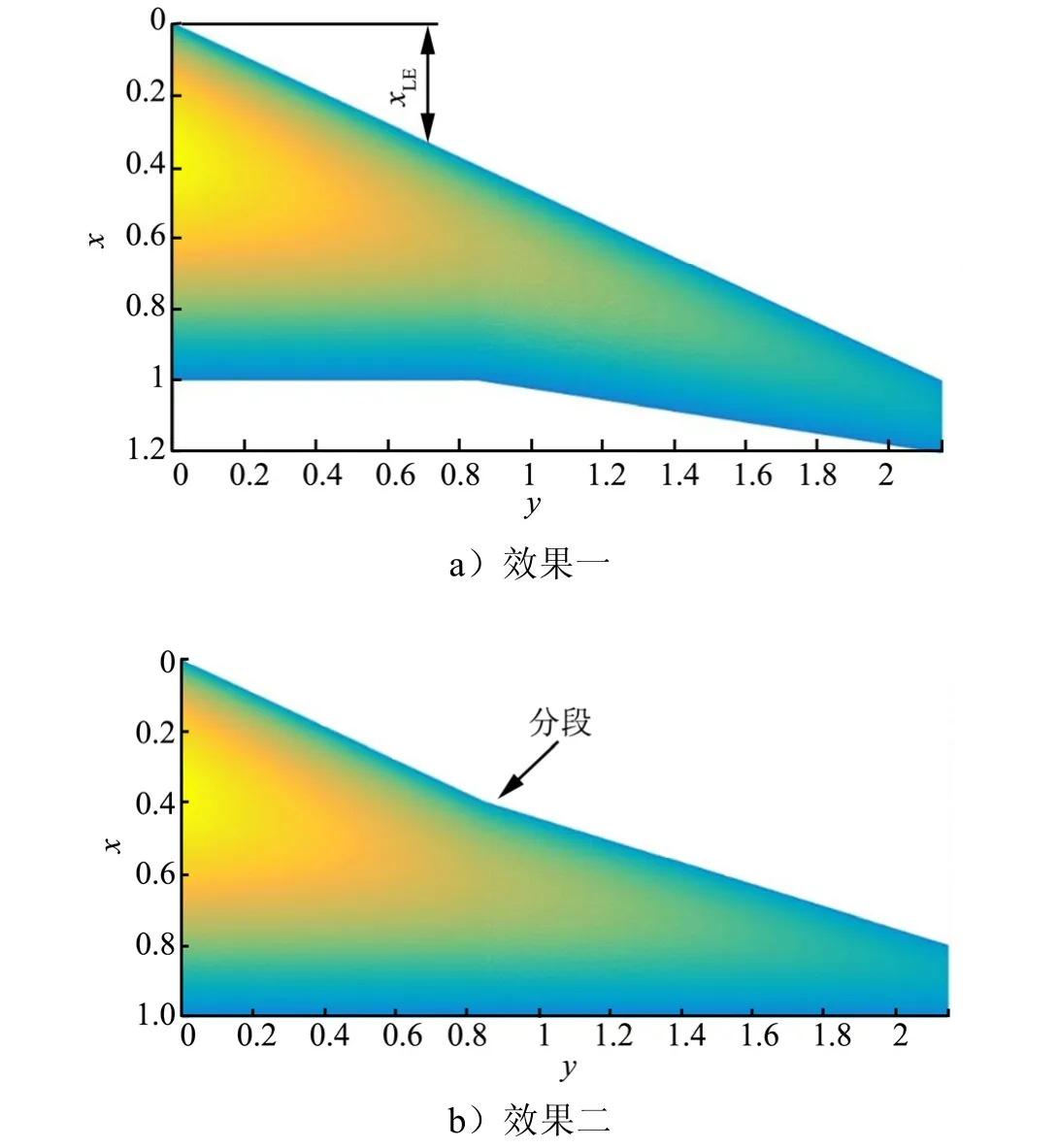
圖4 分段翼型效果圖Fig.4 Segmented Airfoil Effect Diagram
圖4 為三維機(jī)翼在Oxy平面的投影,圖中只列舉出分成兩段的機(jī)翼,如果要增加控制精度,改變機(jī)翼外形,只需相應(yīng)增加分段控制區(qū)域即可。
機(jī)翼前緣到y(tǒng)軸的距離 xLE可表示為

式中 α為每段機(jī)翼的前緣與y軸的夾角,可根據(jù)α的角度來控制 xLE的距離大小,進(jìn)而控制機(jī)翼前緣的傾斜程度。添加 xLE是為了在生成下一段機(jī)翼時,可以單獨計算本段機(jī)翼的各項數(shù)據(jù),在生成完本段機(jī)翼后,x軸坐標(biāo)直接加上 xLE,則就可完成與前段機(jī)翼的拼接。同時每段機(jī)翼前緣與 y軸的夾角α決定本段機(jī)翼的延伸方向,可以通過變化α的大小來改變每段機(jī)翼前緣的延伸方向,通過機(jī)翼橫截面弦長的大小來控制機(jī)翼后緣的延伸方向。

式中 ζ (ψ )Upper為上表面坐標(biāo); ζ (ψ )Lower為下表面坐標(biāo);S(ψ )u為上表面形狀函數(shù); S (ψ )l為下表面形狀函數(shù)。其中, ψ = ( x - xLE)c。
兩段機(jī)翼的三維效果如圖5所示。

圖5 翼型三維建模Fig.5 Three-dimensional Modeling Diagram of Airfoil
4 結(jié) 論
本文首先介紹了目前普遍被認(rèn)可的翼型參數(shù)化方法,并且逐一分析了其優(yōu)缺點,在此基礎(chǔ)上引出 CST參數(shù)化方法,并闡述了CST參數(shù)化方法的原理和其優(yōu)點,隨后進(jìn)行實驗生成二維機(jī)翼,然后著重介紹了三維幾何圖形的生成方法,并在原文基礎(chǔ)上對生成三維機(jī)翼的方法進(jìn)行改進(jìn),生成了可控分段變化三維機(jī)翼外形。
后續(xù)將嘗試使用CST參數(shù)化方法生成不連續(xù)、一階連續(xù)、二階連續(xù)的機(jī)翼延伸方向的三維機(jī)翼建模,并對生成的機(jī)翼外形進(jìn)行氣動性能分析、氣動外形優(yōu)化。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
