基于立式轉(zhuǎn)臺的導彈控制系統(tǒng)全射向半實物仿真技術(shù)研究
2019-02-19 07:17:56涂海峰陽豐俊
導彈與航天運載技術(shù) 2019年1期
關(guān)鍵詞:計算機
涂海峰,陽豐俊,李 浩
(中國運載火箭技術(shù)研究院,北京,100076)
0 引 言
半實物仿真又稱硬件回路仿真,是工程領域內(nèi)一種應用較為廣泛的仿真技術(shù),是在計算機仿真回路中接入一些實物進行試驗,因而更接近實際情況。這種仿真試驗將對象實體的動態(tài)特性通過建立數(shù)學模型、編程,在計算機上運行,這是導彈控制和制導系統(tǒng)設計驗證過程中必須進行的仿真試驗[1~3]。
導彈半實物仿真試驗通常需要引入仿真回路的彈載硬件包括彈載計算機、慣組、伺服舵機。由于慣組的引入,需要通過轉(zhuǎn)臺來提供彈體姿態(tài)的模擬。目前,通常用于控制系統(tǒng)半實物仿真的轉(zhuǎn)臺主要包括三軸臥式轉(zhuǎn)臺和三軸立式轉(zhuǎn)臺。由于機械機構(gòu)的限制,臥式和立式轉(zhuǎn)臺所提供的姿態(tài)角參考分別為按照“321”轉(zhuǎn)序和“231”轉(zhuǎn)序旋轉(zhuǎn)得到。a)對于以在射面內(nèi)飛行為主的彈道式導彈而言,從發(fā)射慣性系到彈體坐標系的轉(zhuǎn)換順序為“321”。由于三軸臥式轉(zhuǎn)臺的姿態(tài)角轉(zhuǎn)序與發(fā)射慣性系到彈體坐標系順序一致,通常采用臥式轉(zhuǎn)臺完成半實物仿真,然而臥式轉(zhuǎn)臺建設完成之后發(fā)射方位角是固定的,不能適應任意發(fā)射方位角的仿真。b)選用四軸或五軸轉(zhuǎn)臺,雖然極大增加了成本,但不能充分利用已有轉(zhuǎn)臺。本文選用立式三軸轉(zhuǎn)臺,其外軸為偏航軸可以在仿真前選擇任意發(fā)射方位角;對于姿態(tài)角轉(zhuǎn)序不一致問題,本文推導了“321”轉(zhuǎn)序下的彈體運動學到立式轉(zhuǎn)臺“231”模式下的角運動之間的傳遞模型,并通過某導彈半實物仿真驗證了模型的正確性,實現(xiàn)了立式轉(zhuǎn)臺開展彈道導彈全射向仿真可能。
1 轉(zhuǎn)臺結(jié)構(gòu)
目前常用于導彈飛控系統(tǒng)半實物仿真的轉(zhuǎn)臺主要包括立式三軸轉(zhuǎn)臺和臥式三軸轉(zhuǎn)臺。
立式三軸轉(zhuǎn)臺的結(jié)構(gòu)如圖1所示,它有3個可轉(zhuǎn)動框架,由外到內(nèi)分別稱為偏航框、俯仰框和滾轉(zhuǎn)框,由于機械結(jié)構(gòu)的固定,可實現(xiàn)姿態(tài)歐拉角的轉(zhuǎn)換順序為先偏航,再俯仰,最后是滾轉(zhuǎn),通常稱為“231”轉(zhuǎn)序。
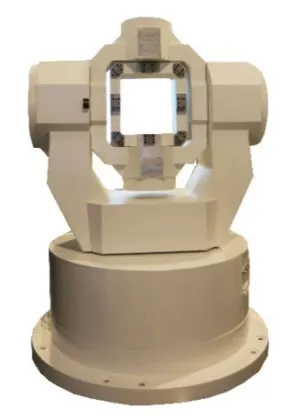
圖1 立式轉(zhuǎn)臺結(jié)構(gòu)示意Fig.1 Schematic Diagram of Vertical Turntables
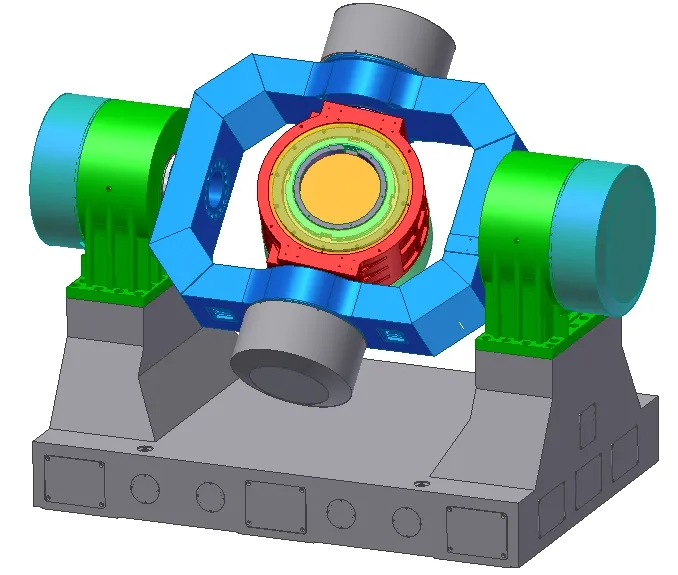
臥式三軸轉(zhuǎn)臺的結(jié)構(gòu)如圖 2所示。臥式三軸轉(zhuǎn)臺同樣有 3個可轉(zhuǎn)動框架,由外到內(nèi)分別稱為俯仰框、偏航框和滾轉(zhuǎn)框。與立式轉(zhuǎn)臺最大的區(qū)別在于其外框和中框的結(jié)構(gòu)變換了,俯仰框放在最外面,偏航放在中間。由于機械結(jié)構(gòu)的固定,它可實現(xiàn)姿態(tài)歐拉角的轉(zhuǎn)換順序為先俯仰,再偏航,最后是滾轉(zhuǎn),通常稱為“321”轉(zhuǎn)序。
2 半實物仿真方案
導彈半實物仿真試驗原理如圖 3所示,試驗是將彈載計算機、慣組、伺服舵機等實物引入仿真回路,同時采用彈道仿真計算機實現(xiàn)導彈飛行仿真,伺服機構(gòu)負載模擬器實現(xiàn)伺服舵機的負載模擬,綜合測控計算機實現(xiàn)仿真過程中的數(shù)據(jù)實時監(jiān)控,轉(zhuǎn)臺可實現(xiàn)彈體姿態(tài)角運動仿真,不能實現(xiàn)在線運動仿真,因此加速度還需要由彈道仿真計算機仿真生成。
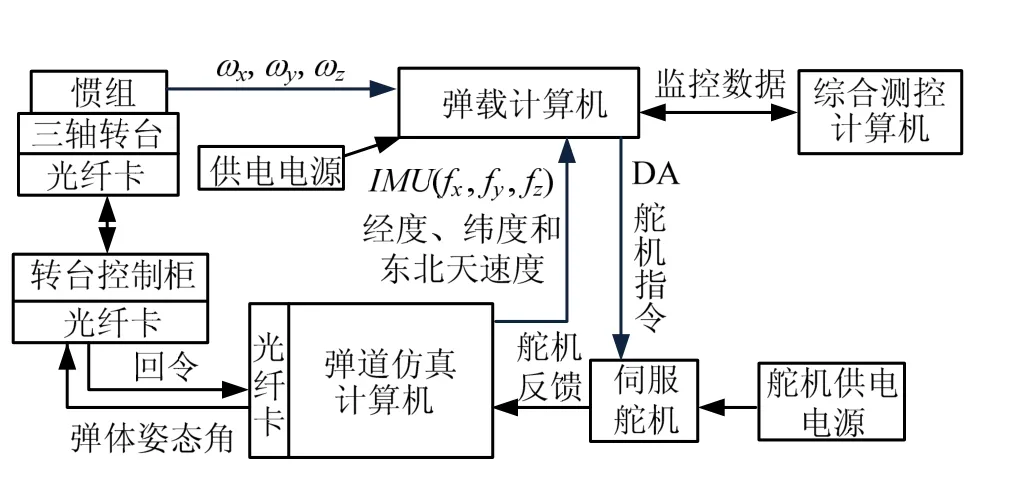
圖3 半實物仿真試驗方案示意Fig.3 Schematic Diagram of the Semi-physical Simulation
3 基于立式轉(zhuǎn)臺的半實物仿真方法
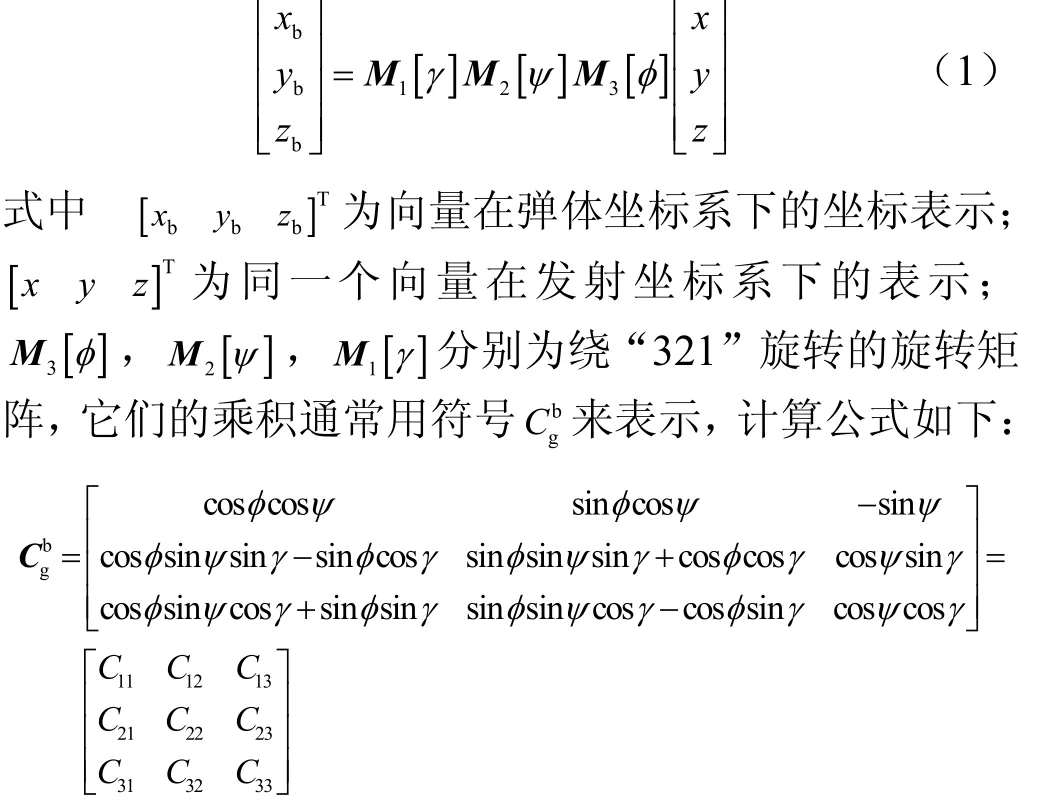
根據(jù)半實物仿真方案,需要采用三軸轉(zhuǎn)臺來模擬彈體姿態(tài)角,然后由慣組對轉(zhuǎn)臺角速度進行敏感,測量得到角速度傳給彈載計算機。彈道導彈的彈體運動學方程通常是在發(fā)射慣性坐標系下建立的,而仿真過程當中轉(zhuǎn)臺是相對地球是不動的,因此仿真中給轉(zhuǎn)臺發(fā)送的姿態(tài)角需要扣除地球自轉(zhuǎn),即給轉(zhuǎn)臺發(fā)送的是發(fā)射系下的姿態(tài)角。發(fā)射坐標系相對于彈體系的姿態(tài)角是按照“321”的順序旋轉(zhuǎn)得到,如圖4所示,Oxyz為發(fā)射坐標系,其與彈體坐標系的轉(zhuǎn)換關(guān)系為:先繞Oz軸正向轉(zhuǎn)動得到俯仰角φ,然后繞y′軸正向轉(zhuǎn)動偏航角ψ,最后繞 xb軸正向旋轉(zhuǎn)滾轉(zhuǎn)角γ,可得到彈體坐標系Oxyz[4,5]。b bb
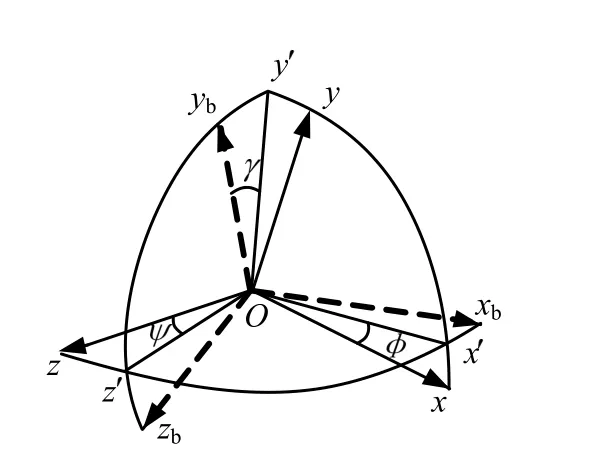
圖4 發(fā)射坐標系與彈體坐標系之間的歐拉角關(guān)系Fig.4 Euler Angle Relation between the Launch Inertial Coordinate System and the Body Coordinate System
由此可以得到這兩個坐標系之間的方向余弦關(guān)系為
為了實現(xiàn)對姿態(tài)角的模擬通常采用三軸轉(zhuǎn)臺,根據(jù)轉(zhuǎn)臺的結(jié)構(gòu)特點,需要選用臥式轉(zhuǎn)臺,其姿態(tài)角的旋轉(zhuǎn)順序與發(fā)射坐標系相對于彈體系姿態(tài)角的旋轉(zhuǎn)順序相同,均是“321”轉(zhuǎn)序。然而臥式轉(zhuǎn)臺的外框是俯仰框,該類型轉(zhuǎn)臺在安裝完成之后其發(fā)射方位角是固定的,不能隨著發(fā)射方位角的需要隨時調(diào)整轉(zhuǎn)臺。由于慣組敏感的是彈體相對于發(fā)慣系的角速度,因此除了彈體相對于地球的角運動外,還能敏感地球自轉(zhuǎn)。地球自轉(zhuǎn)在發(fā)射系下的分量形式如式(2)。
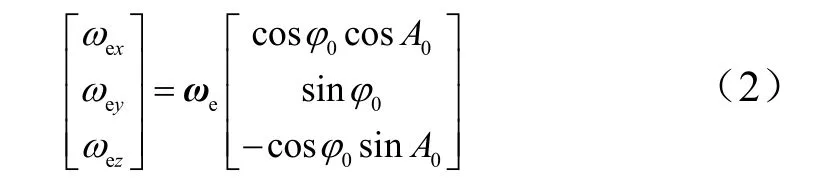
式中eω為地球自轉(zhuǎn)角速度;0?為發(fā)射點緯度;0A為發(fā)射方位角,可見地球自轉(zhuǎn)角速度在發(fā)射系下的分量與發(fā)射方位角有關(guān)。由于不能調(diào)整臥式轉(zhuǎn)臺方位角,使得彈載計算機與彈道仿真計算機計算的姿態(tài)角由于地球自轉(zhuǎn)分量不一致而存在誤差,導致仿真誤差偏大。
為了解決該問題,這里選用立式轉(zhuǎn)臺,立式轉(zhuǎn)臺的姿態(tài)角定義為轉(zhuǎn)臺先繞 y軸正向旋轉(zhuǎn)得到偏航角Tψ,然后繞新坐標系的z軸正向旋轉(zhuǎn)得到俯仰角Tφ,最后再繞新坐標系的x軸正向旋轉(zhuǎn)得到滾轉(zhuǎn)角Tγ。由此,可以得到轉(zhuǎn)臺坐標系與彈體坐標系之間的方向余弦矩陣為[6~8]
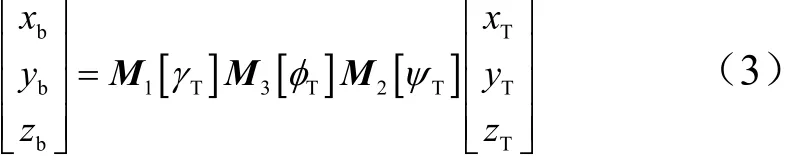
式中 [xTyTzT]T為向量在發(fā)射坐標系下的表示;M2[ψT],M3[ φT],M1[ γT]分別為繞y-z-x軸旋轉(zhuǎn)的旋轉(zhuǎn)矩陣。令:

由于立式轉(zhuǎn)臺的外框是偏航框,因此其可以旋轉(zhuǎn)一個初始偏航角以滿足任意發(fā)射方位角的需求,立式轉(zhuǎn)臺姿態(tài)角的旋轉(zhuǎn)順序(“231”)與發(fā)射坐標系相對于彈體系姿態(tài)角旋轉(zhuǎn)順序(“321”)不同,如果直接將彈體運動學解算得到的發(fā)射系姿態(tài)角發(fā)送給轉(zhuǎn)臺,則其模擬的姿態(tài)運動將不是真實彈體的姿態(tài)角運動。為此,對兩個不同轉(zhuǎn)序姿態(tài)角,需建立“321”轉(zhuǎn)序姿態(tài)角到“231”轉(zhuǎn)序姿態(tài)角的轉(zhuǎn)換模型。轉(zhuǎn)換的方式為:當轉(zhuǎn)臺固定之后,其零位對應的發(fā)射方位角假設為TA,則仿真開始之前讓轉(zhuǎn)臺旋轉(zhuǎn)一個初始偏航角:
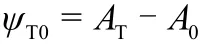
此時轉(zhuǎn)臺坐標系與發(fā)射坐標系重合,根據(jù)式(1)和式(3)可知,發(fā)射坐標系下的同一個向量通過不同的旋轉(zhuǎn)方式得到了在彈體坐標系下的相同坐標表示,則有:

根據(jù)等式矩陣對應的元素相等,可以得到立式轉(zhuǎn)臺與發(fā)射坐標系姿態(tài)角之間的轉(zhuǎn)換關(guān)系:
由于式(4)存在除以cosφ的現(xiàn)象,因此這里要求仿真彈道的俯仰角不能超過±90°,以避免存在除零的現(xiàn)象。由此,在實際的仿真中在發(fā)送給轉(zhuǎn)臺姿態(tài)角時,需要將彈體運動學解算的發(fā)射系相對于彈體系的姿態(tài)角按照式(4)進行轉(zhuǎn)換之后發(fā)送給轉(zhuǎn)臺。
4 實例仿真分析
以圖3所示的半實物仿真方案中偏航角和滾轉(zhuǎn)角為例,某次半實物仿真綜合測控計算機保存的彈載計算機解算的姿態(tài)角以及立式轉(zhuǎn)臺旋轉(zhuǎn)的姿態(tài)角分別與真值(彈道仿真計算機解算的姿態(tài)角)誤差的對比如圖5所示。
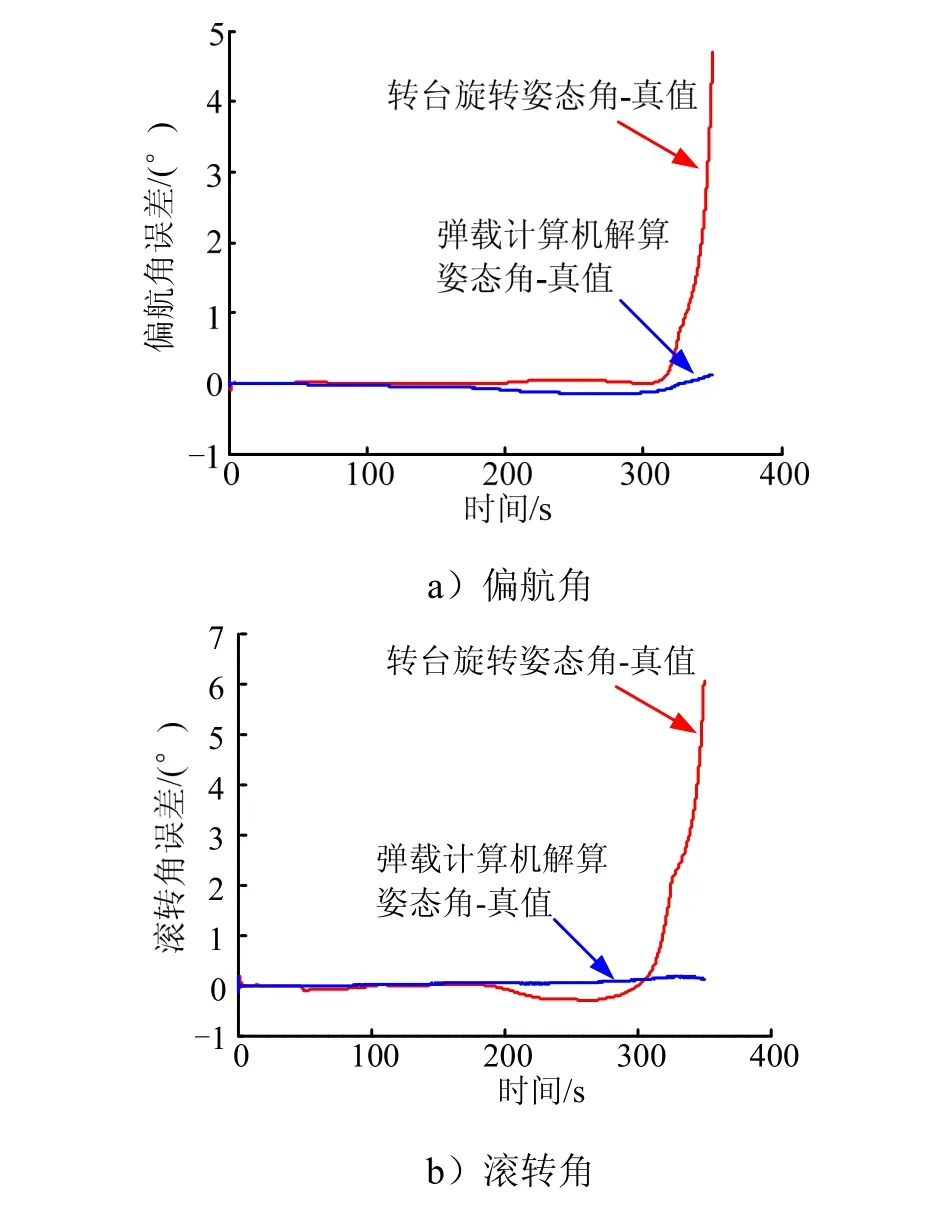
圖5 姿態(tài)角解算誤差對比Fig.5 Contrast Diagram of Attitude Angle Calculation Error
從圖 5中可見,轉(zhuǎn)臺姿態(tài)角與彈體仿真中發(fā)射系姿態(tài)角誤差隨著仿真而變化,但是彈載計算機解算的姿態(tài)角能很好地跟蹤彈道仿真計算機解算姿態(tài)角,由此說明通過本文所推導的姿態(tài)角轉(zhuǎn)換關(guān)系能使立式轉(zhuǎn)臺完成“321”轉(zhuǎn)序的彈道仿真。
5 結(jié) 論
本文通過相應的坐標旋轉(zhuǎn)關(guān)系推導,得到了“321”轉(zhuǎn)序姿態(tài)角到“231”轉(zhuǎn)序姿態(tài)角的轉(zhuǎn)換關(guān)系,并將該轉(zhuǎn)換關(guān)系應用于半實物仿真,實現(xiàn)立式轉(zhuǎn)臺完成在發(fā)射慣性坐標系下建立的彈道導彈彈體運動學半實物仿真,使得半實物仿真不局限于轉(zhuǎn)臺固定的發(fā)射方位角,可以實現(xiàn)任意發(fā)射方位角下的半實物仿真,拓展了已有轉(zhuǎn)臺的仿真能力,節(jié)約了成本。
猜你喜歡
小學科學(學生版)(2021年7期)2021-07-28 06:44:42
趣味(數(shù)學)(2020年9期)2020-06-09 05:35:08
鐵道通信信號(2020年12期)2020-03-29 06:21:58
科技傳播(2019年22期)2020-01-14 03:06:34
科技傳播(2019年22期)2020-01-14 03:06:30
消費導刊(2017年20期)2018-01-03 06:26:40
電子制作(2017年14期)2017-12-18 07:08:10
辦公自動化(2016年18期)2016-08-20 12:50:22
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鐵道通信信號(2016年3期)2016-06-01 12:10:18
