SeaBat7125多波束聲納在深拖系統上的應用
2019-02-14 05:56:51郭煥順
珠江水運 2019年23期
關鍵詞:工作原理
郭煥順
摘 要:SeaBat7125多波束聲納是搭載在深拖系統上重要的聲學測量裝備之一。多波束聲吶是常見的海底地形測量設備,在海洋失事船舶飛機的快速搜尋救助中起到重要的作用。本文首先介紹了SeaBat7125多波束聲納的系統組成,然后分析SeaBat7125多波束聲納的工作原理,最后介紹在海上搜尋的實際應用。
關鍵詞:多波束系統 深拖系統 工作原理 水下目標物搜尋
隨著“海洋強國”戰略和“一路一帶”倡議的部署實施,海上交通是各國間經濟貿易往來的重要途徑。對海上人命財產安全的保護逐漸得到各國的重視。因此,加強海上人命救助特別是深遠海搜救能力對沿海和周邊國家的社會穩定具有重要意義。2016年,南海救助局就推進深遠海搜救能力建設發展引進了一套深拖系統,而SeaBat7125多波束是其搭載的重要的聲學測量裝置。主要是利用聲波在水中的傳播特性,計算出掃側海域的多個水深點,而多個水深點的集合即是該掃側海域的完整二維水深圖,經過后處理后能得到三維視圖。
1.多波束系統的組成和安裝
SeaBat7125多波束換能器安裝在深海拖曳載體的時候,集成在鈦合金殼體中,耐壓可達6000米水深,掃側量程為0.5米至500米。由于SeaBat7125多波束換能器基陣大小決定了其作業量程,因此,要在大深度海域掃側且得到高測深分辨率,可以將多波束安裝于拖體上,利用其穩定性強,可搭載其他輔助設備為多波束提供大深度掃側平臺。
1.1系統組成
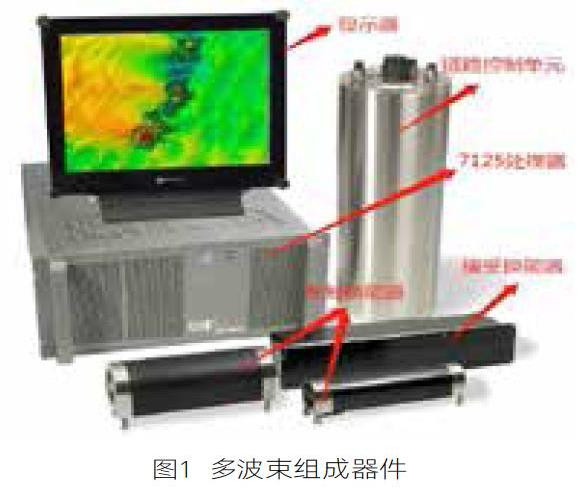
SeaBat7125多波束系統的組成部分主要有發射接收換能器、鏈路控制單元(LCU)、7125處理器、顯示屏及其他輔助設備。
SeaBat7125多波束換能器由一個接收換能器和兩個發射換能器組成,兩個發射換能器分別控制著200kHz和400kHz兩個發射頻率。發射換能器是聲波發射器,根據基陣特性扇形定向發射一定數量的波束,波束到達海底后反射到接收換能器。
鏈路控制單元是為聲吶換能器和7125處理器提供雙向通訊鏈路,控制換能器的工作模式、發射頻率和功率等,再通過高速通訊鏈路將數據傳輸至7125處理器。
7125處理器是DAC-310工控機,對大量輸入輸出的數據流進行管理,并對換能器傳輸過來的信號數據,同時結合外部輔助數據進行處理。最后將數據進行儲存。
顯示屏是對7125處理器處理好的數據通過采集軟件sonar UI或處理軟件Qinsy進行顯示.
輔助設備包括PHINS6000慣性導航單元和多普勒計程儀、聲速剖面儀、差分GPS接收機。慣性導航單元和多普勒計程儀能夠提供定位、真實航向、離底高度、速度、深度值及升沉信息。聲速剖面儀用于測定海域的聲速剖面。差分GPS能給出準確的地理坐標。這些輔助設備的數據都能傳輸到7125處理器中,用于多波束數據的修正處理。
1.2系統安裝
SeaBat7125多波束換能器在拖體上的位置安裝十分重要,直接影響其聲波發射和接受質量。接受換能器與發射換能器垂直組合安裝,基陣面朝下并處于同一水平即是平行于YX面,接受換能器固定安裝在拖體正下方,垂直于拖體航跡線,發射換能器則與航跡線平行。
SeaBat7125的整體連接包括濕端和干端兩部分。濕端部件有換能器和鏈路控制單元(LCU),安裝在拖體上并在一定水深工作。換能器與鏈路控制單元通過針孔水密接頭連接,雙向傳輸信號脈沖和為換能器供電。干端主要包括工控機處理器、顯示屏及GPS接收機。鏈路控制單元通過以太網和光纖的相互轉換實現與干端7125處理器高速長距離雙向傳輸。聲速、姿態導航定位、GPS等輔助設備通過以太網連接7125處理器上的RJ-45網絡端口,將數據匯入并處理,最終在顯示器上顯示。
2.多波束系統工作原理
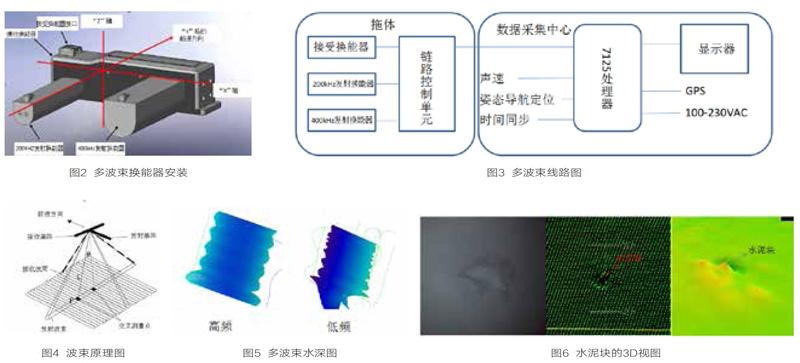
7125多波束系統利用多個基陣排列的換能器通過壓電陶瓷效應,向海底發射寬覆蓋扇形聲波,并由接受換能器對海底回波進行窄波接受。如下圖,發射基陣組成的發射換能器沿著拖體縱向安裝并向下發射沿著航跡線縱向窄,橫向寬的扇形波束。接受基陣波束特性剛好與發射基陣相反,接受基陣橫向安裝并接受沿航跡線縱向寬,橫向窄的反射聲波。通過發射波束和接受波束在海底相交,在垂直航跡線的條帶區域形成多個照射“腳印”,而這些腳印就是海底采樣點,也是測深點。對“腳印”內反射的聲波信號的時延和接受角度的估算,再結合聲速剖面儀數據利用公式計算出該點的水深值。每次計算出的多個波束水深點組成一條垂直航向的水深條帶,隨著拖體不斷航行,沿著航跡線的每條水深條帶就組成了一個完整的海底水深圖。
假設發射換能器向海底發射聲波信號,聲波信號到達海底散射后,接受換能器接受由θ角方向返回來的波束,接受信號后可以測量該聲波從發射到接受的時延Δt,既可以計算出圖4中斜邊L的長度,也是聲波的傳輸距離。
上式中C表示聲波信號的傳輸速度,Δt表示主動聲吶從信號發射到信號接受的時間差,根據接受波束角度θ可以算出:
其中H表示被測點P處的水深,XH表示被測點P的相對中軸線的水平距離。
3.多波束系統在深拖上的應用
SeaBat7125多波束系統搭載著兩個不同發射頻率的換能器,分別是200kHz和400kHz。使用不同的發射頻率直接影響其掃側效率以及圖像分辨率。使用低頻工作時,工作離底高度大,掃側覆蓋區域廣,所以工作效率高,但測深分辨率低。使用高頻工作時正好相反,工作離底高度小,掃側覆蓋區域相對較小,所以工作效率低,但測深分辨率高。所以在海上水下搜尋時,要根據目標物大小選擇開啟不同的發射頻率。
圖5為某次深拖作業中采集到的多波束數據,經過處理生成水深圖。當多個波束信號發射接收后得到多個被測點的水深值,在處理的過程中將在同個水深值范圍內的水深點呈現同一種顏色,不同水深值范圍內的水深點呈現不同的顏色或者是漸變色。最終可以得到如下圖所示的海底水深圖,根據顏色判斷海底地形或者目標物。圖中使用高頻時分辨率明顯高于低頻,能清晰顯示海底部分小坑洼。
圖6所示為某次試驗中多波束的掃側圖,最左邊的圖為試驗過程中將一塊1×1立方米的水泥塊拋入海中,水泥塊側躺在海床上并一半陷入泥沙里,菱角朝上。中間的圖為多波束在該水泥塊上方掃側收集到的波束點。通過對波束點的后處理得到右圖的3D圖。
4.結束語
隨著海洋資源開發和海洋工程的不斷發展,水下聲學測量裝置的技術開發和應用得到前所未有的重視。特別是多波束系統在海洋勘察測繪、海洋石油勘探、水下考古、水下搜尋救助等海洋資源開發和海洋工程領域得到廣泛的應用。多波束系統作業途徑多樣,可搭載安裝于船舶船底、拖魚、ROV、AUV等水上水下作業平臺上。多波束系統搭載在深拖系統上的應用具有高效率、高分辨、低成本等優勢。特別是在深海水下目標物的搜尋中,能夠在廣闊的搜尋區域內,快速準確地發現目標并精準定位。
【基金項目:國家重點研發計劃項目資助,項目編號:2017YFC0306003】
參考文獻:
[1]趙巍.淺談SeaBat8125多波束測深系統應用問題及處理辦法[J].測繪與空間地理信息,2011,34(4):241-242.
[2]劉陳.多波束系統、側掃聲納與磁力儀在海底沉船探測中的比較分析[D].北京:中國地質大學,2015:3-4.
[3]趙旭.海底底質多波束聲學方法探測技術研究[D].哈爾濱:哈爾濱工程大學,2009:10-11.
猜你喜歡
科學與財富(2016年29期)2016-12-27 16:31:30
中國新技術新產品(2016年23期)2016-12-26 09:43:17
科學與財富(2016年18期)2016-12-22 19:31:13
科學與財富(2016年18期)2016-12-22 18:17:21
現代企業文化·理論版(2016年19期)2016-12-21 08:32:27
青年時代(2016年20期)2016-12-08 16:12:19
科學與財富(2016年26期)2016-12-01 21:17:46
中小企業管理與科技·上旬刊(2016年11期)2016-11-28 21:21:49
科技視界(2016年18期)2016-11-03 22:36:30
中國科技博覽(2016年18期)2016-10-19 11:24:50