地下洞室工程施工期智能自動反饋與安全預警
2019-02-12 02:50:40孫立昌張顯羽駱曉鋒
水電與抽水蓄能 2019年5期
孫立昌 ,張顯羽 ,駱曉鋒 ,徐 磊
(1.福建廈門抽水蓄能有限公司,福建省廈門市 361107;2.河海大學水利水電學院,江蘇省南京市 210098)
0 引言
抽水蓄能電站建設持續推動著地下洞室工程的發展。近些年來,施工期反饋分析[1]正逐漸在地下洞室工程設計和施工中發揮越來越重要的作用,而基于施工期監測資料的圍巖力學參數反演,以及基于反演參數的超前預測與安全預警則是施工期反饋分析的重要組成部分。相關學者在此方面已取得了諸多研究成果[2-6]。但仍存在施工期圍巖力學參數反演效率較低,以及參數反演、后續施工預測與安全預警這一本質上連貫的過程無法實現自動化等問題。
鑒于此,本文基于BP神經網絡與通用有限元軟件平臺ABAQUS,采用均勻試驗設計法選取網絡訓練樣本,并實現了基于文件分塊以及信息分組與順序編碼技術的有限元計算文件自動生成,進而通過編制相關程序,實現了樣本有限元分析及結果提取的自動化,樣本輸入輸出文件生成的自動化,BP神經網絡訓練的自動化,監測資料讀取及參數反演值輸出的自動化,后續施工預測的自動化,以及安全預警的自動化,實現了地下洞室工程施工期智能自動反饋與安全預警。
1 基于均勻試驗設計法的樣本點選取
本文采用BP神經網絡反演施工期圍巖力學參數,如何為網絡訓練創建具有統計效應且足夠數量的訓練樣本是成功反演的核心問題之一[7]。本文采用均勻試驗設計法選取樣本點。
運用均勻試驗設計法選取樣本點首先需要確定試驗因素數目及試驗設計水平數目,具體到本文所涉及圍巖力學參數反演,試驗因素數目即為反演參數數目,而試驗設計水平數目則與所選用的均勻設計表共同確定了樣本點數目(試驗次數)。在此基礎上,結合反演參數的取值范圍,即可依據所選用的均勻設計表確定各樣本點。網絡訓練樣本的全體稱為訓練樣本集或訓練樣本空間,其中任一訓練樣本包括輸入與輸出兩部分,對于圍巖力學參數反演而言,任一樣本的輸出即為該樣本點所代表的反演參數向量,而輸入則是與此反演參數對應的測點計算數據(由于本文以監測位移數據為圍巖力學參數反演的基礎信息,故樣本輸入是測點位移計算值),該數據需要通過開展有限元分析(稱為樣本有限元分析)來獲取。
為提高樣本點選取環節的自動化水平,依據均勻試驗設計法基本理論與均勻設計表,通過編制相關程序實現了樣本點選取和樣本輸出文件集生成的自動化。
2 有限元計算文件的自動生成
對于各樣本點,調用ABAQUS開展有限元分析以獲取形成樣本輸入文件所需的測點計算數據,為此,首先要創建與樣本點數量相同的樣本有限元計算文件集。此外,為實現后續施工預測,亦需準備相應的有限元計算文件。為了減少準備有限元計算文件的工作量,依據ABAQUS計算文件(簡稱為INP文件)的固有結構和書寫規則,應用徐磊等[8]提出的文件分塊以及信息分組與順序編碼技術,通過編制相關程序實現了INP文件自動生成。
需要說明的是,目前可用于地下洞室工程有限元計算模型建立的軟件平臺很多,雖然所開發軟件采用ABAQUS求解內核作為有限元分析工具,但對于具有任意文件格式的有限元模型,均可在提取有限元分析所需數據(如結點定義數據、單元定義數據、集合定義數據等)的基礎上,通過編寫簡易的輸入數據文件,由所開發程序自動生成可供ABAQUS求解內核調用的INP文件。
3 圍巖力學參數BPNN智能自動反演
BP神經網絡(BPNN)已成功應用于地下工程圍巖力學參數反演領域[9-11]。BP神經網絡模型包括輸入層、隱含層和輸出層(見圖1),各層均由一定數量的神經元(節點)組成,基本思想是通過輸入層導入學習樣本,使用BP算法對網絡的連接權值和偏差進行調整訓練,使網絡輸出與期望輸出盡可能地接近,當網絡輸出層的誤差平方和小于指定的誤差時訓練完成,訓練完成后的網絡即可依據實際輸入給出相應的輸出。
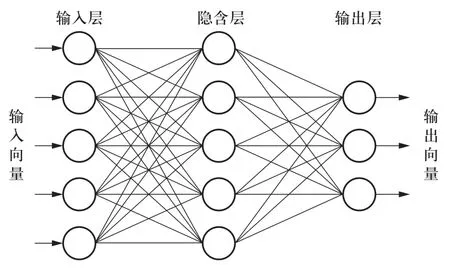
圖1 BP神經網絡模型Figure 1 BP Neural network model
為實現施工期圍巖力學參數的BPNN智能自動反演,首先需要依據訓練樣本集對BP神經網絡模型進行訓練。完成訓練樣本集創建的前提是開展樣本INP文件集的有限元分析,若由分析人員逐個提交文件開展有限元分析,無疑是低效且不便的。為此,通過編制相關程序調用ABAQUS實現了樣本INP文件集的批量自動分析。在此基礎上,即可通過提取各ABAQUS計算結果文件中的測點計算數據創建樣本輸入文件集,進而結合節2中自動生成的樣本輸出文件集,即可完成訓練樣本集的創建。在創建樣本輸入文件集的過程中,工作量往往較大,當測點個數較多、樣本點數量較多時更為如此。針對這一問題,在分析ABAQUS計算結果文件結構的基礎上,通過編制相關程序實現了提取測點計算數據的自動化以及樣本輸入文件集的自動生成。
此外,為了實現施工期圍巖力學參數的BPNN智能自動反演,需明確如下問題[8]:①輸入層、輸出層節點數;②網絡層數;③隱含層節點數;④連接權初始值;⑤神經元激勵函數。
BP神經網絡的輸入、輸出層節點數取決于樣本的輸入、輸出向量的維數,具體而言輸入層節點數等于各測點位移分量數之和,而輸出層節點數等于反演參數個數。
BP神經網絡的理論研究表明,2層網絡結構(1個隱含層與1個輸出層)可以實現任意非線性映射,雖增加網絡層數可以提高精度,但會帶來效率的降低,綜合考慮反演效率與反演精度,本文選擇2層網絡結構。
目前,隱含層節點數的確定并無一個統一方法,通常是綜合考慮效率與精度后加以確定,本文采用公式(1)確定隱含層節點數k。

式中n、m——分別為輸入層與輸出層的節點數;
a——余量,可依據實際問題選擇合理取值,本 文取為15。
對于連接權初始值,取為(0.1, 0.9)之間的均勻分布隨機數。
BP神經網絡采用的神經元激勵函數(用于控制神經元輸出)有階躍函數和Sigmoid函數等,考慮到Sigmoid函數的應用最為廣泛,本文采用Sigmoid函數作為激勵函數,其表達式見式(2):

式中:b——Sigmoid函數的斜率,取為1,x為激勵函 數輸入。
在上述基礎上,依據BP算法[11],編制了BP神經網絡的自動訓練程序,進而結合前述相關程序,可實現基于施工期實測變形資料的圍巖力學參數BPNN智能自動反演。
4 后續施工預測及安全預警
所謂后續施工預測,即是依據反演所得參數開展后續施工步序(預測步)的圍巖及支護結構力學特性預測。為實現參數反演與后續施工預測2個環節間的自動連接,編制了接口程序,該程序可自動完成2次有限元分析,即首先采用反演所得的圍巖力學參數完成1次有限元正分析(分析步為反演步),進而基于此次正分析的結果文件,利用ABAQUS重啟動功能完成預測INP文件的有限元分析。
在后續施工預測的基礎上,結合施工期現場監測資料,即可進行施工期圍巖穩定安全預警。安全預警的核心問題是預警指標的選取以及預警值的確定。
現階段,尚未形成工程界一致認可的施工期圍巖失穩預警指標以及確定預警值的方法。考慮到變形量是判斷圍巖穩定與否的最直觀依據,本文采用圍巖變形量作為預警指標。在所開發的安全預警程序中,提供兩種用于確定預警值的方法,一種是依據《水利水電工程錨噴支護技術規范》(SL 377—2007)[12]中的相關規定(見表1)由程序自動計算預警值,另一種是由用戶自主定義預警值。
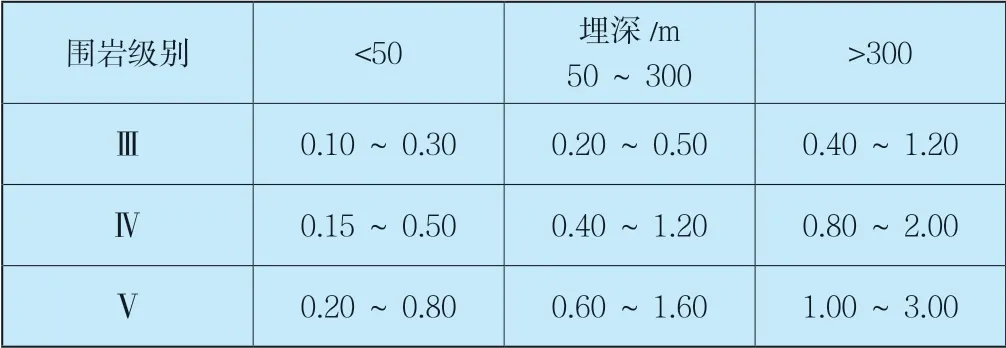
表1 隧洞周邊允許位移相對值(%)Table 1 The relative value of the allowable displacement
在上述基礎上,通過編制相關程序實現了預警控制點處后續施工預測計算結果的自動提取和標準化以及其與預警值的自動比較和預警信息的自動輸出,這實際上亦實現了后續施工預測與安全預警2個環節間的自動連接。
5 智能自動反饋分析流程
在上述基礎上,可給出智能自動反饋分析流程,見圖2。
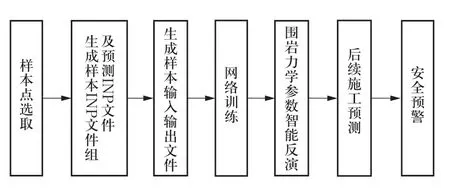
圖2 反饋分析流程Figure 2 The procedure of feedback analysis
基于上述流程,通過編制程序實現了參數智能反演、后續施工預測以及安全預警為一體的地下洞室工程智能自動反饋與安全預警。
6 算例分析
某抽水蓄能電站地下廠房洞室群是一組以主副廠房洞室為中心的地下洞室群。算例分析中考慮廠房、主變壓器室及母線洞,并取2號機組母線洞中心剖面為分析斷面,圖3給出了分析斷面的巖體質量級別分區。有限元計算模型(見圖4)取垂直廠房縱剖面并指向下游為X軸方向,Y軸鉛直向上。在X軸方向,主副廠房軸線上游側取195m圍巖,下游側取260m圍巖,在Y軸方向,模型頂部取至地表面,底部取為尾水管底板開挖高程以下130m。模型側向及底部邊界法向約束,頂部為自由邊界,圍巖初始應力按自重應力場考慮,圍巖采用基于Drucker-Prager屈服準則的理想彈塑性本構模型。地下洞室群分8步開挖(見圖5),計算模型中各類巖體的物理力學參數設計給定值列于表2。
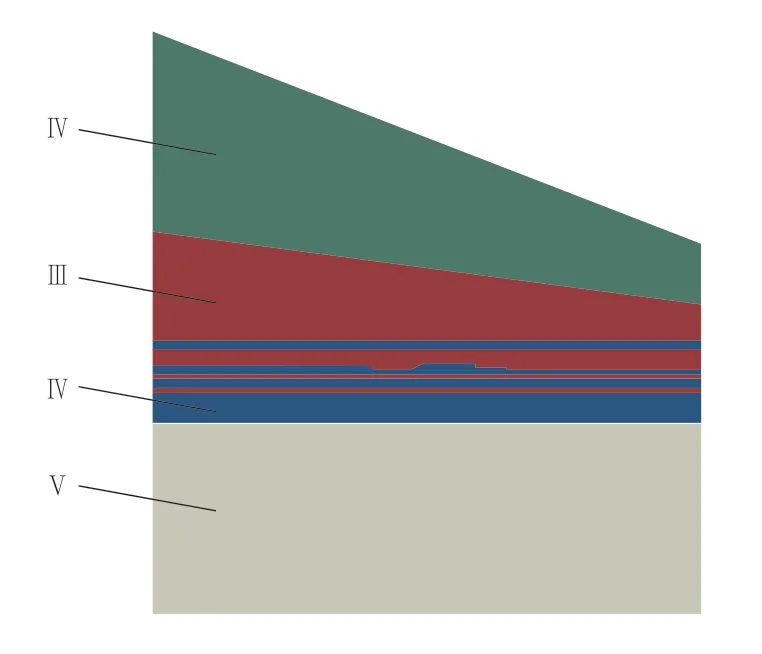
圖3 巖體質量分區Figure 3 The region of different rock quality classes
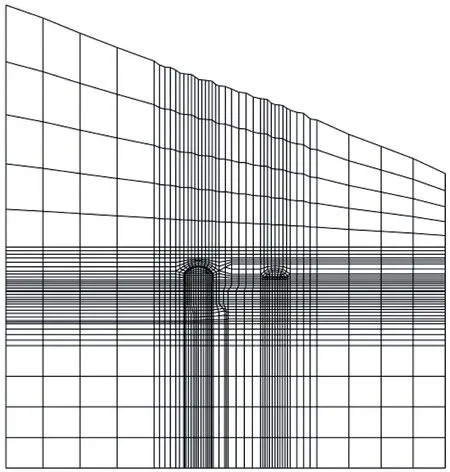
圖4 有限元計算模型Figure 4 FEM model
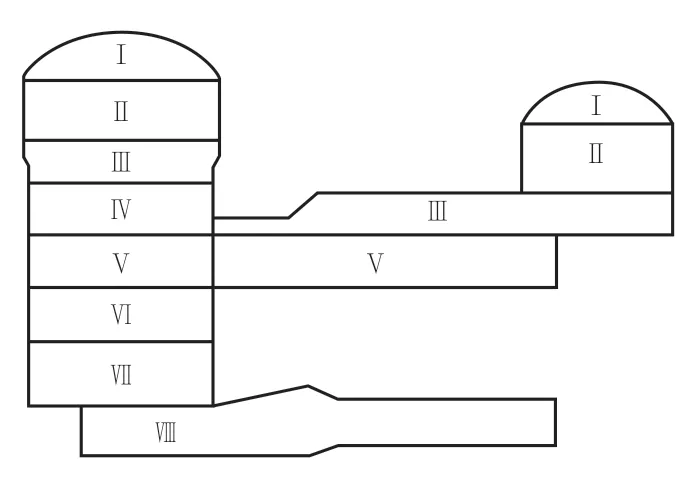
圖5 洞室開挖方案Figure 5 Excavation scheme of cavern
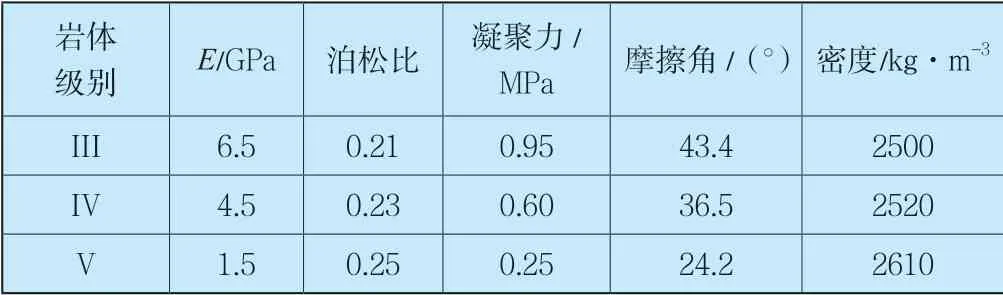
表2 材料物理力學參數Table 2 Physical and mechanical parameters
預警指標取為第2步開挖完成后所形成的開挖斷面特征點對收斂位移,為綜合考慮開挖形成斷面的水平向及豎向收斂變形,主廠房與主變壓器室各取2對特征點對,第1對特征點對為頂拱與開挖完成斷面底板中點,第2對特征點為左拱腳與右拱腳。各特征點對收斂位移的預警值依據《水利水電工程錨噴支護技術規范》(SL 377—2007)按表1確定。
不失一般性,算例分析中首先按設計方給定的圍巖力學參數進行計算,并以第1步開挖的預埋式多點位移計測點(測點布置見圖6)計算位移值作為參數反演所需的監測資料,隨后應用所開發程序完成圍巖施工期力學參數(變形模量)反演以及第2步開挖的后續施工預測和安全預警。考慮到前2步開挖體周邊圍巖主要為Ⅲ、Ⅳ級巖體,故取反演參數為Ⅲ、Ⅳ級巖體的變形模量,計算模型中所涉及的其他物理力學參數均取設計定值。依據工程經驗,反演參數取值范圍定為1.0~10.0GPa。此外,算例分析中,樣本數取為10。
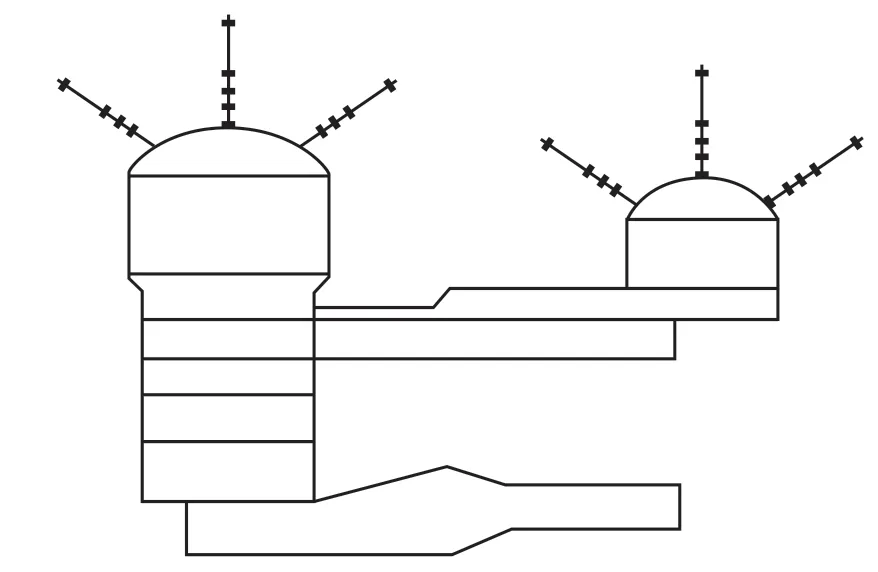
圖6 測點布置圖Figure 6 Layout of the measuring points
表3給出了參數反演值,圖7、圖8給出了自動預測所得的第2步開挖后圍巖位移分布云圖。從中可以看出,所開發程序可獲得較高精度的反演參數,并在完成參數反演的基礎上,可實現所需的后續施工預測。

表3 參數給定值與反演值Table 3 The given and inversion value of parameters
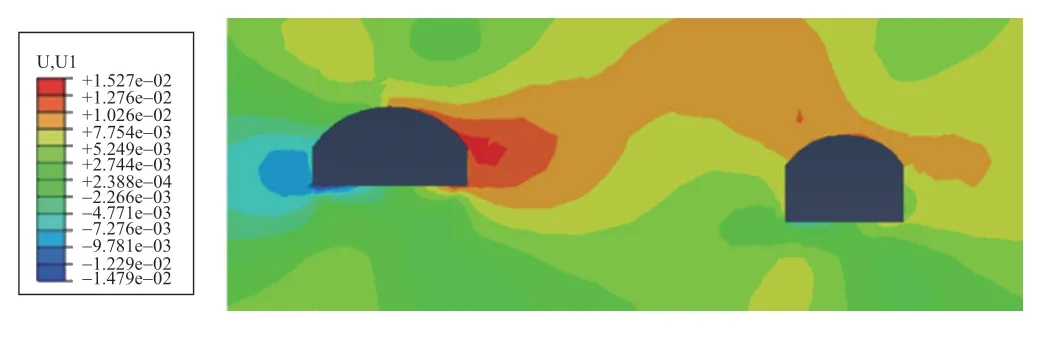
圖7 水平位移分布云圖(m)Figure 7 The contour of horizontal displacement(m)
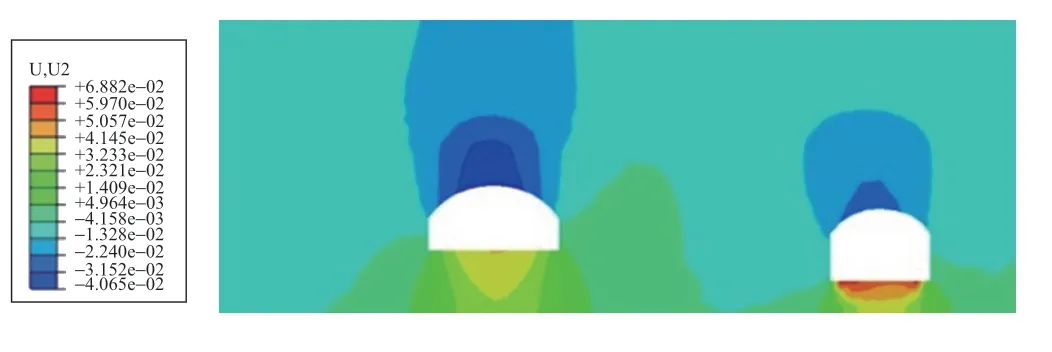
圖8 豎向位移分布云圖(m)Figure 8 The contour of vertical displacement(m)
表4給出了自動安全預警所得的相關信息,從中可以看出,第2步開挖完成后,主廠房和主變壓器室豎向收斂變形均超過了規范允許值,這表明若在第1步開挖結束后不適時對圍巖進行支護就直接進行第2步開挖,可能會導致圍巖失穩。據此預警信息,應在第1步開挖完成后,及時對圍巖施加必要的支護措施,以保證后續開挖步的圍巖穩定安全性。
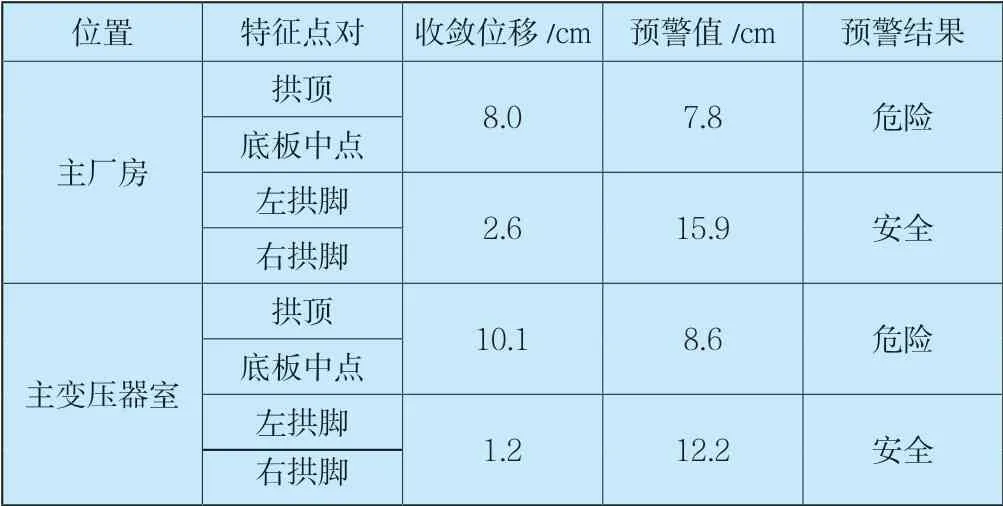
表4 預警結果Table 4 The result of safety early-warning
7 結語
為在解決施工期圍巖力學參數反演無法實現快速化以及參數反演、后續施工預測與安全預警無法實現自動化的問題。本文基于均勻試驗設計方法、BP神經網絡與通用有限元軟件平臺ABAQUS,結合文件分塊以及信息分組與順序編碼技術,給出了圍巖力學參數BPNN智能自動反演方法,繼而提出了自動開展后續施工預測與安全預警的方法,實現了地下洞室工程施工期智能自動反饋與安全預警,并通過算例分析初步驗證了所提出方法和所編制程序的可行性與正確性。
猜你喜歡
上海節能(2020年3期)2020-04-13 13:16:16
中華建設(2019年12期)2019-12-31 06:47:58
裝備制造技術(2019年12期)2019-12-25 03:06:00
天津醫科大學學報(2019年6期)2019-08-13 07:04:32
江西建材(2018年4期)2018-04-10 12:37:22
煤炭學報(2015年10期)2015-12-21 01:55:09
山西煤炭(2015年4期)2015-12-20 11:36:18
江西煤炭科技(2015年1期)2015-11-07 03:06:32
中國鐵道科學(2015年5期)2015-06-21 06:53:18
機械工程師(2015年10期)2015-02-02 01:14:03