三坐標測量機測量誤差分析及補償方法的研究
2019-02-06 09:26:02辛天飛
探索科學(學術版) 2019年7期
辛天飛
深圳市計量質量檢測研究院 廣東 深圳 518000
三坐標測量機屬于一種高精密的測量儀器,而且這個儀器在很多方面都得到了普遍的運用,如產品的設計、生產加工等等。不過在實際進行測量的時候,就會出現一些測量誤差,主要原因有測量方式錯誤等因素。所以,一定要對三坐標測量機的測量誤差進行分析,并且找到合適的補償方法,這樣才可以有效的提升三坐標測量機的精準度。
一、三坐標測量機的原理
三坐標測量機主要就是根據坐標來進行測量的,三坐標測量機的原理就是:把多種幾何元素的測量轉變成為所有集合元素上中所有的點坐標的測量,在測量出所有的點坐標值之后,再使用軟件根據相關的標準來對所有的幾何元素的尺寸、位置、形狀等相關的信息進行準確的計算。三坐標測量機在進行測量的時候,就屬于一個機械手,機械手上可以安裝一些不同形狀的探針,而且經過這些探針上面的測量工具來進行高精度的測量工作。在對一個零件進行測量的時候,經過手動控制或者是使用系統來控制的方法,讓三坐標測量機沿著三個方面的軸線進行運動,并且把機械手上面的探針移動到零件上,當探針接觸到零件的時候,相關的測量系統就會把相關的數據信息傳輸到相關的系統當中。要是選出了非常多的測量點,規劃合理的測量方式,可以讓零件測量的更加的精準。
現階段,三坐標測量機已經不屬于一種實驗類的工具了,現在三坐標測量機已經被普遍的運用到了車間生產工作當中。三坐標測量機在一些制造系統當中使用,可以對生產出來的產品進行質量檢測,并且還可以對其進行分析,還能對一些設備和生產系統進行檢驗的工作,同時還能夠清楚的了解到設備的整體情況,了解整個工程的發展。所以,三坐標測量機屬于一種可以確保產品的質量和提供相關信息的一種測量機器。在最近幾年,坐標測量技術在快速的進行發展,現已為人們提供了一種可以對多種結構、多種測量范圍,以及自動化的一種坐標測量機器。而且現階段坐標測量機器已經屬于一種非常重要的測量工具的一種,這個測量工具可以對一個產品的質量進行精準的測量。
二、三坐標測量機測量誤差的分析
(一)裝配的誤差。裝配的誤差問題就是說是部件在進行安裝的時候,安裝的位置和最初的設計要求不相似,出現一些差別。裝配中出現誤差的情況主要有三方面的內容,第一方面就是零部件的誤差,主要包含了零件在進行加工時候所出現的誤差,設備在進行工作的時候使零件出現變形的情況,還有就是因為磨損所導致的誤差。第二方面就是測量工具的誤差,這主要就是說測量時所使用的工具出現一些誤差,這樣也就導致在進行檢測的時候精準度下降,從而就會出現誤差。第三方面就是操作時出現的誤差,這是因為在使用測量工具進行測量的時候,出現目測等一些情況的影響,導致出現的誤差。例如,在橋式三坐標測量機當中,三坐標測量機裝配時所出現的誤差主要有兩點,一點就是形狀的誤差,這是指在三坐標測量機中所有的零部件進行加工的時候和計劃當中的形狀有一點不同,如直線和平面的角度等。另一點就是位置的誤差,這個就是說在加工結束后,所有的點線面的位置和預計的位置不一樣,出現偏差。三坐標測量機的工作特點就是可以以最快的速度對坐標進行收集,避免出現相關的誤差,確保三坐標測量機的測量精準度。
(二)環境溫度的誤差。環境溫度的誤差就是說因為環境溫度的改變導致三坐標測量機當中的相關零部件出現熱脹冷縮的情況,這樣也就導致三坐標測量機的測量精準度下降。隨著現階段三坐標測量機的測量精準度在漸漸地提高,怎樣來降低三坐標測量機周圍環境的溫度就變成了現在非常重要的一個問題。現階段,在對溫度進行研究的時候,主要就是對材料和軟件補償這兩點來進行考慮,在材料方面,一般都會選用一些膨脹系數比較小的材料,三坐標測量機的橋架和臺面等都是使用花崗巖材料或者陶瓷材料來進行制作的,然后滑動導軌和光柵尺就會使用一些金屬材料或者陶瓷材料來進行制作,并且還需要控制三坐標測量機的工作溫度,所以盡量要將室內的溫度保持在要求溫度以內,這樣才可以讓三坐標測量機在測量的時候盡可能的減少溫度帶來的誤差。除此之外,還可以使用軟件補償的方法來對溫度的誤差進行修改,首先使被測工件等溫到和坐標機的環境溫度一致,再把溫度傳感器吸附在工件非測量位置,輸入該工件材料膨脹系數到溫度補償軟件模塊中并激活溫度補償運行程序.這樣也是可以提升三坐標測量機測量時的精準度的。
(三)光柵系統的誤差。三坐標測量機上面的三個坐標軸都是經過三個高精度直線光柵和讀數頭組合而成的,這樣就可以更好的進行準確定位,所以光柵實際的數值和標準的數值間出現的誤差是因為三坐標測量機定位誤差所導致。光柵在實際進行測量的時候,主要是根據實物來進行測量的,想要提升光柵的測量精準度是非常復雜的,雖然現在已經使用了很多中方法來完善光柵測量的精準度,但是在生產加工、調整和信號等一些步驟當中,還是會出現一些不能避免的因素,比如光柵材料和光柵刻線在光學性質中有著不均勻的情況,導軌的直線要是出現誤差那么就會導致光柵也隨之出現變化等等因素,這樣也就導致光柵的莫爾條紋信號和計劃當中的信號是有一些差別的,這樣也就導致整個過程的相關信息都會出現改變。光柵系統的誤差具備著控制性和不可避免的性質,要想讓測量的數據變得更加精準是非常困難的,而且就算提升了精準度,那么付出的代價也是比較高的。所以,要根據現在有的一些條件,來讓三坐標測量機的測量精準度得到提高。除此之外,導致三坐標測量機精準度下降的原因還有控制系統的誤差等等一些誤差情況,因此,只要對三坐標測量機的誤差進行全面的研究,才可以找出提升三坐標測量機測量精準度的方法。誤差標定就屬于一個花費成本比較低,而且效率非常高的方法,它可以有效地提升三坐標測量機的測量精準度,而且這樣的改善方法也已經受到了很多人的認可。
三、三坐標測量機誤差補償方法
(一)溫度補償方法。第一,標準溫度下結構參數的標定。在溫度導致出現誤差的時候,一定要先去確定好標準溫度下設備出現的誤差數據,也就是說三坐標測量機在沒有受到溫度影響的時候,測量時所得出來的相關數據,在確認好相關數據之后,就可以有一個標準的數值來進行比較,這樣在以后也可以對誤差數值進行比較。
第二,對溫度信息進行收集。在記錄完相關數據之后,就要對現在出現溫度誤差的三坐標測量機進行測量。根據相關參數來對所有的參數進行正確的測量和收集,這樣就可以得到所有的參數,然后把測量結果和實際的結果進行比較,這樣就可以判斷三坐標測量機受到溫度影響和沒有收到影響的差別,然后就可以進行相關的調整。隨后就可以使用相關的公式來對其進行補償,經過補償就可以得到和沒有受到溫度影響時的相同的數據。
(二)動態誤差補償法。第一,軟件修正法進行補償。根據測量儀器的動態誤差出現的時間不一樣,所以可以分為兩方面的誤差,一種是實時誤差,這種誤差的補償方式就是對實際的誤差數據來進行補償,這樣的方法可以提升誤差修正的準確度,不過花費的成本比較高。另一種就是非實時誤差補償,這種補償方式就是對系統收集的相關數據進行研究,然后進行校正,這樣的補償方式成本是比較低的,而且很多人都會使用這樣的方法來進行補償。
第二,測量力誤差補償。三坐標測量機在進行測量的時候,因為會受到測量力的影響,導致出現形變的情況,這樣也就會使測桿出現位置偏離的情況,使測量出現誤差。想要進行補償就可以將三坐標測量機的測頭和測桿的結構數據提取,然后設計一個相關的模型來進行研究,如圖一。
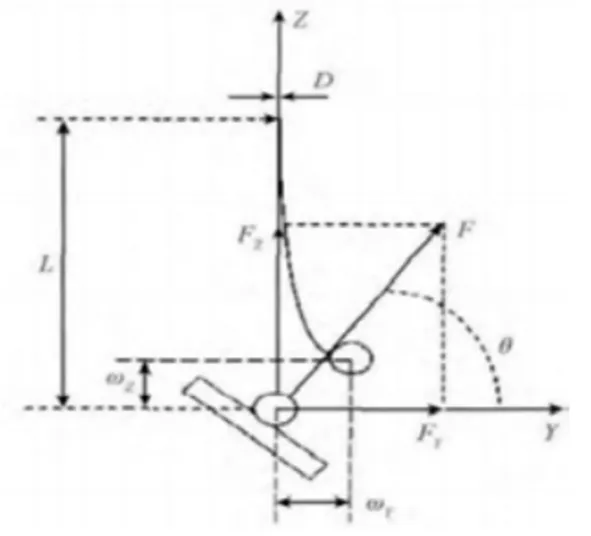
對這樣的模型來進行研究,可以看出測量力對測桿產生的位移情況和壓縮的情況。這樣就可以了解到測量力和位移與壓縮之間的聯系。結合這樣的關系,就可以根據測量力的情況來對測量桿的位移與壓縮情況進行補償,這樣也就會減少誤差,提升三坐標測量機的精準度。
結束語
總的來說,本篇文章主要就是對三坐標測量機的測量誤差進行分析,并且研究出了有效地補償方法。在進行分析誤差的時候,主要根據三坐標測量機常見的幾種誤差進行研究,這樣做主要就是為了給以后的補償方式提供相應的基礎。然后根據誤差來研究兩種合適的補償方法,并且對補償方法的運用進行介紹,希望可以有效地提升三坐標測量機的測量精準度,減少誤差的出現。
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56