星間測(cè)量自主導(dǎo)航改進(jìn)狀態(tài)相關(guān)黎卡提方程濾波
2019-01-21 09:29:34,
中國(guó)空間科學(xué)技術(shù) 2018年6期
關(guān)鍵詞:系統(tǒng)
,
中國(guó)空間技術(shù)研究院 錢學(xué)森空間技術(shù)實(shí)驗(yàn)室,北京 100094
分布式衛(wèi)星系統(tǒng)是由物理上互不相連、共同協(xié)作完成同一航天任務(wù)的多衛(wèi)星構(gòu)成的空間系統(tǒng)[1],由于其具有對(duì)地面依賴性小、自主性強(qiáng)、靈活可變、綜合成本低等特點(diǎn),成為衛(wèi)星技術(shù)發(fā)展的新趨勢(shì)。分布式衛(wèi)星系統(tǒng)實(shí)現(xiàn)自主協(xié)同需具備的核心和基礎(chǔ)能力是自主導(dǎo)航[2],其自主導(dǎo)航問(wèn)題與普通衛(wèi)星存在較大區(qū)別:既需要確定每個(gè)衛(wèi)星的精確空間位置和速度,又需要確定衛(wèi)星之間的相對(duì)位置速度關(guān)系。在分布式衛(wèi)星系統(tǒng)應(yīng)用任務(wù)中,衛(wèi)星間的相對(duì)信息相對(duì)于絕對(duì)信息更容易獲得,近年來(lái),利用星間相對(duì)觀測(cè)的自主導(dǎo)航技術(shù)備受關(guān)注。這些相對(duì)觀測(cè)量包括視線角、星間相對(duì)距離和相對(duì)位置矢量等[3-9]。能否基于相對(duì)測(cè)量序列求解各自衛(wèi)星的絕對(duì)位置和速度,在理論上取決于系統(tǒng)的能觀性能,在應(yīng)用上涉及高性能定軌濾波算法。
文獻(xiàn)[10-11]研究了基于星間測(cè)距的雙星自主導(dǎo)航方法,指出沒(méi)有先驗(yàn)信息,僅依靠相對(duì)距離測(cè)量的導(dǎo)航系統(tǒng)是虧秩的,并給出了嚴(yán)格的數(shù)學(xué)證明。文獻(xiàn)[12]針對(duì)雙星編隊(duì)首次提出了僅利用地心慣性坐標(biāo)系中星間相對(duì)位置矢量序列作為觀測(cè)量的自主絕對(duì)導(dǎo)航方法,并采用局部線性化的方法分析了其能觀性,文章指出此方法在半長(zhǎng)軸相等的共面圓軌道情況下不適用,但未給出嚴(yán)格的理論證明。文獻(xiàn)[13]對(duì)文獻(xiàn)[12]提出的導(dǎo)航方法進(jìn)行了物理角度的闡述,把雙星系統(tǒng)視作一個(gè)巨型加速度計(jì),并對(duì)定軌精度進(jìn)行了分析,并說(shuō)明該方法除幾個(gè)0°傾角的特殊軌道外,在大部分情況下是能觀的。文獻(xiàn)[14]首次對(duì)基于星間位置矢量測(cè)量的雙星自主導(dǎo)航系統(tǒng)使用非線性系統(tǒng)局部能觀性理論進(jìn)行分析,通過(guò)數(shù)學(xué)證明指出在兩衛(wèi)星瞬時(shí)地心距不相等的情況下可以定軌。文獻(xiàn)[2]在上述研究基礎(chǔ)上提出了非線性系統(tǒng)局部k階能觀性的概念,并證明了理想二體軌道模型下該自主導(dǎo)航系統(tǒng)局部4~6階能觀的充要條件及其與非線性系統(tǒng)能觀性秩條件成立的關(guān)系。文獻(xiàn)[15]考慮能觀性強(qiáng)弱對(duì)濾波算法的影響,給出了一個(gè)基于相對(duì)位置矢量自主導(dǎo)航系統(tǒng)能觀性秩條件的能觀度指標(biāo),并據(jù)此對(duì)無(wú)跡濾波(Unscented Kalman Filter,UKF)算法進(jìn)行改進(jìn),提高了導(dǎo)航定位的精度。但由于在算法中,指標(biāo)只能基于位置速度的估計(jì)值而非其真值得到,因此不能真實(shí)反映系統(tǒng)能觀度的大小。
衛(wèi)星動(dòng)力學(xué)模型是個(gè)典型的非線性系統(tǒng),一般采用非線性濾波算法對(duì)軌道進(jìn)行估計(jì)。常用的方法有擴(kuò)展卡爾曼濾波[16-19](Extended Kalman Filter,EKF)和無(wú)跡濾波[20-22]等。狀態(tài)相關(guān)黎卡提方程(State-Dependent Riccati Equation,SDRE)方法[23]通過(guò)構(gòu)造線性結(jié)構(gòu)解決非線性系統(tǒng)的最優(yōu)控制問(wèn)題,隨之應(yīng)用于非線性系統(tǒng)的估計(jì)[24],構(gòu)成的濾波器被稱為狀態(tài)相關(guān)黎卡提方程濾波(State-Dependent Riccati Equation Filter,SDREF)。在無(wú)隨機(jī)游走的確定性系統(tǒng)中,SDREF可以全部獲得系統(tǒng)的非線性信息。這使得可以將非線性系統(tǒng)作為線性系統(tǒng)來(lái)處理,不存在線性化誤差,且無(wú)需計(jì)算Jacobian矩陣。
在本文的研究中,SDREF被用作利用地心慣性坐標(biāo)系中星間相對(duì)位置矢量序列作為觀測(cè)量的自主導(dǎo)航估計(jì)器,并與EKF算法在濾波步驟、計(jì)算負(fù)擔(dān)和濾波精度等方面進(jìn)行了比較。本文推導(dǎo)并定義了一種新的在線反映能觀性程度的特征量,提出了基于該特征量對(duì)濾波增益陣進(jìn)行在線調(diào)整的改進(jìn)SDREF算法。數(shù)學(xué)仿真表明,該改進(jìn)SDREF算法在保持SDREF計(jì)算量小的優(yōu)點(diǎn)下,導(dǎo)航估計(jì)精度明顯優(yōu)于采用EKF和SDREF算法的結(jié)果。
1 SDREF原理
SDREF是一種參數(shù)化的濾波方法,它將非線性系統(tǒng)改寫為線性化結(jié)構(gòu),系統(tǒng)矩陣和觀測(cè)矩陣的參數(shù)由當(dāng)前狀態(tài)決定,稱為狀態(tài)相關(guān)系數(shù)(State-Dependent Coefficients,SDC)。SDREF與EKF唯一的不同之處在于EKF是在估計(jì)狀態(tài)附近展開進(jìn)行線性化近似,而SDREF是將非線性系統(tǒng)做參數(shù)化處理,這一轉(zhuǎn)換過(guò)程稱為偽線性化。
考慮如下的連續(xù)非線性系統(tǒng):
(1)
式中:X為n維狀態(tài)向量;Y為m維觀測(cè)向量;f(·),h(·)分別為n維和m維非線性函數(shù);w和v分別為n維和m維高斯白噪聲向量,各分量間互不相關(guān),且滿足
(2)
由文獻(xiàn)[25]可知,如果f(·),h(·)可微且滿足f(0)=0,h(0)=0,則非線性系統(tǒng)(1)可以轉(zhuǎn)化為如下具有SDC的線性形式:
(3)
其狀態(tài)方程和觀測(cè)方程的系數(shù)矩陣以狀態(tài)向量為參數(shù)。由于沒(méi)有進(jìn)行線性化近似,式(1)轉(zhuǎn)化為式(3)的過(guò)程中不會(huì)損失任何信息,可以運(yùn)用線性系統(tǒng)標(biāo)準(zhǔn)Kalman濾波方法對(duì)式(3)進(jìn)行處理。
首先對(duì)式(3)進(jìn)行離散化,得到
(4)
式中:Φ(Xk)為狀態(tài)轉(zhuǎn)移矩陣;H(Xk)為觀測(cè)矩陣;wk和vk分別為離散化的狀態(tài)噪聲和觀測(cè)噪聲,當(dāng)采樣間隔Δt較小時(shí)滿足
狀態(tài)轉(zhuǎn)移矩陣Φ(Xk)如下:
(5)
在計(jì)算時(shí)一般取二階近似:
(6)

步驟1:選定濾波初值
步驟2:狀態(tài)一步預(yù)測(cè)
(7)
步驟3:計(jì)算一步預(yù)測(cè)均方誤差
(8)
步驟4:計(jì)算濾波增益
(9)
步驟5:計(jì)算估計(jì)均方誤差
Pk+1=(I-Kk+1Hk+1)Pk+1/k
(10)
步驟6:狀態(tài)更新
(11)
從上述過(guò)程中可以看出,與EKF算法相比,雖然SDREF沒(méi)有線性化損失信息量,但是f(X)和h(X)在改寫時(shí)拆解出了一個(gè)右乘狀態(tài)向量,其對(duì)狀態(tài)方程和觀測(cè)方程的描述有所欠缺。因此SDREF和EKF兩種算法對(duì)模型的近似程度高低難以給出明確的定論,后文會(huì)通過(guò)理論分析和數(shù)值仿真對(duì)SDREF和EKF算法在相對(duì)位置矢量測(cè)量自主導(dǎo)航系統(tǒng)中的表現(xiàn)進(jìn)行探討。
2 系統(tǒng)模型
考慮基于星間相對(duì)位置矢量測(cè)量的雙星自主導(dǎo)航系統(tǒng),將兩顆衛(wèi)星記為衛(wèi)星A和衛(wèi)星B,測(cè)量關(guān)系如圖1所示。
O是地球中心,rA和rB分別是地心到兩衛(wèi)星的矢量,rAB是衛(wèi)星A到衛(wèi)星B的位置矢量。已知衛(wèi)星A搭載了星敏感器和星間相對(duì)測(cè)量設(shè)備(包括無(wú)線電或激光測(cè)距儀、光學(xué)或雷達(dá)測(cè)向儀),可以測(cè)量自身在慣性空間中的姿態(tài)、衛(wèi)星A與衛(wèi)星B間的距離以及衛(wèi)星B在衛(wèi)星A本體坐標(biāo)系中的方位,通過(guò)坐標(biāo)轉(zhuǎn)換可以得到兩衛(wèi)星在慣性空間中的相對(duì)位置矢量。
本文選取地心赤道慣性坐標(biāo)系為參考坐標(biāo)系,坐標(biāo)原點(diǎn)為地球質(zhì)心,基準(zhǔn)面為赤道面,X軸指向春分點(diǎn),Z軸指向北極,Y軸與X軸和Z軸構(gòu)成右手直角坐標(biāo)系。含J2攝動(dòng)項(xiàng)的衛(wèi)星軌道動(dòng)力學(xué)模型為[26]:
(12)

(13)
選取地心赤道慣性坐標(biāo)系下兩衛(wèi)星的位置速度向量為系統(tǒng)狀態(tài)變量,記
X為12維狀態(tài)變量,則帶J2攝動(dòng)項(xiàng)的系統(tǒng)狀態(tài)方程為:
(14)
其中系統(tǒng)噪聲w包括未考慮的高階地球非球形引力、太陽(yáng)光壓、大氣阻力等攝動(dòng)力。
觀測(cè)方程為:
Y=h(X)+v=rA-rB+v=HX+v
(15)
3 SDREF與EKF計(jì)算量對(duì)比
在基于相對(duì)位置矢量觀測(cè)的雙星導(dǎo)航系統(tǒng)中,由于觀測(cè)矩陣是線性定常的,SDREF與EKF唯一的區(qū)別在狀態(tài)轉(zhuǎn)移矩陣Φk的計(jì)算上,前者由當(dāng)前時(shí)刻的參數(shù)化矩陣求得,而后者由Jacobian矩陣求得。

對(duì)于SDREF,狀態(tài)方程(14)可以改寫為:
(16)
記I3×3為I3,則離散后的狀態(tài)轉(zhuǎn)移矩陣為
(17)
對(duì)于EKF,狀態(tài)方程非線性函數(shù)的Jacobian矩陣
(18)
式中:
狀態(tài)轉(zhuǎn)移矩陣
(19)
分析式(17)中SDREF狀態(tài)轉(zhuǎn)移矩陣的形式,可以得到以下定理。
定理1 在以式(14)為系統(tǒng)方程、式(15)為觀測(cè)方程的導(dǎo)航系統(tǒng)中,若SDREF滿足以下條件:
1)初始時(shí)刻估計(jì)向量協(xié)方差矩陣P0為對(duì)角4×4分塊陣;
2)觀測(cè)矩陣H為對(duì)角1×4分塊陣;
3)狀態(tài)誤差和觀測(cè)誤差為各分量互不相關(guān)的白噪聲,即Qk與Rk為對(duì)角陣。
則后續(xù)每一時(shí)刻的狀態(tài)誤差協(xié)方差矩陣Pk都是對(duì)角4×4分塊陣。
證明:用數(shù)學(xué)歸納法進(jìn)行證明。
1)當(dāng)k=1時(shí),顯然成立。

一步預(yù)測(cè)均方誤差陣Pg+1/g為:
(20)
Pg+1/g是對(duì)角4×4的分塊陣。
(21)

則濾波增益矩陣Kg+1為:
(22)
Kg+1是對(duì)角4×1分塊陣。
將式(20)和式(22)帶入式(10)中,由于Kg+1,Hg+1和Rg+1都是對(duì)角分塊陣,所以Pg+1是對(duì)角4×4分塊陣。
由式(1)(2),如果SDREF滿足定理1的條件1)~3),則每一時(shí)刻的誤差協(xié)方差矩陣Pk都是對(duì)角4×4分塊陣。
在本文分析的自主導(dǎo)航系統(tǒng)中,定理1的條件是比較容易滿足的,此時(shí)Pk,Φk,Kk均為對(duì)角分塊陣,12維矩陣運(yùn)算可簡(jiǎn)化為4維矩陣運(yùn)算,計(jì)算量約是EKF的12.5%。
4 基于能觀度的改進(jìn)濾波算法
能觀度是系統(tǒng)能觀性強(qiáng)弱的度量,表征了系統(tǒng)狀態(tài)可由輸出反映的程度。非線性系統(tǒng)能觀度的大小會(huì)隨著狀態(tài)變化而波動(dòng),從而對(duì)濾波算法產(chǎn)生影響。在能觀度較大的時(shí)刻,系統(tǒng)由觀測(cè)反映狀態(tài)的能力較強(qiáng),濾波估計(jì)誤差較小;反之,能觀度較小的時(shí)刻,由觀測(cè)反映狀態(tài)的能力較弱,濾波估計(jì)誤差較大。
目前常用的能觀度評(píng)價(jià)準(zhǔn)則有基于能觀性矩陣的評(píng)價(jià)準(zhǔn)則和基于濾波誤差協(xié)方差陣P的評(píng)價(jià)準(zhǔn)則。基于能觀性矩陣的評(píng)價(jià)準(zhǔn)則需要計(jì)算矩陣的奇異值,求解比較繁瑣,且要基于狀態(tài)真值進(jìn)行計(jì)算。由于在實(shí)際濾波中真值是未知的,因此這種評(píng)價(jià)標(biāo)準(zhǔn)并不能準(zhǔn)確反映系統(tǒng)能觀度的大小。基于濾波誤差協(xié)方差陣P的評(píng)價(jià)準(zhǔn)則不需要求解能觀性矩陣,計(jì)算量比較小,但是在非線性濾波算法中,P陣不能反映真實(shí)的估計(jì)誤差協(xié)方差大小,所以此準(zhǔn)則也不能真實(shí)反映系統(tǒng)能觀度的情況。
本文從能觀度的物理意義出發(fā),基于濾波算法量測(cè)更新過(guò)程給出了非線性系統(tǒng)能觀度的另外一種表征方式。
(23)
矩陣的Frobenius范數(shù)定義為:若A=(aij)∈Rm×n,規(guī)定
(24)
已知Frobenius范數(shù)具有如下性質(zhì):
式中:λi(ATA)為矩陣ATA的第i個(gè)特征值。
依據(jù)以上分析,在濾波的時(shí)間更新過(guò)程中對(duì)一步預(yù)測(cè)估計(jì)誤差協(xié)方差陣的計(jì)算公式進(jìn)行修改,引入一個(gè)縮放參數(shù)ρ,將式(8)改寫為:
(25)

由此,依據(jù)當(dāng)前時(shí)刻系統(tǒng)能觀度的大小對(duì)誤差協(xié)方差陣進(jìn)行了修正,在適當(dāng)擴(kuò)大P的基礎(chǔ)上兼顧到能觀度的影響,增強(qiáng)了濾波的穩(wěn)定性,提高了濾波精度。由式(7)、式(9)~式(11)、式(25)構(gòu)成的算法本文稱之為改進(jìn)的狀態(tài)相關(guān)黎卡提方程濾波算法(Modified State-Dependent Riccati Equation Filter, MSDREF)。
5 仿真與分析
考慮分布式衛(wèi)星系統(tǒng)在衛(wèi)星編隊(duì)飛行、自主空間在軌服務(wù)和非合作目標(biāo)測(cè)量等應(yīng)用場(chǎng)景中,星間相對(duì)距離較近,因此選取兩個(gè)軌道相近的衛(wèi)星。兩衛(wèi)星的初始軌道參數(shù)如表1所示。
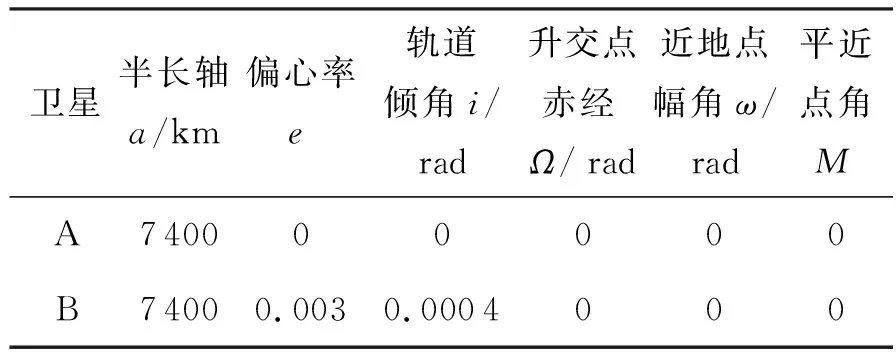
表1 兩衛(wèi)星初始軌道參數(shù)
衛(wèi)星A搭載了星敏感器和星間相對(duì)測(cè)量設(shè)備(包括無(wú)線電或激光測(cè)距儀、光學(xué)或雷達(dá)測(cè)向儀),可以測(cè)量自身在慣性空間中的姿態(tài)、衛(wèi)星A與衛(wèi)星B間的距離以及衛(wèi)星B在衛(wèi)星A本體坐標(biāo)系中的方位。利用上述測(cè)量量,相對(duì)位置矢量在慣性空間中的坐標(biāo)可由下式解得:
(26)

仿真時(shí)間為40 000 s,星敏感器觀測(cè)數(shù)據(jù)更新率為0.5 Hz,星間測(cè)距數(shù)據(jù)采樣率為0.2 Hz,設(shè)定濾波周期為10 s,在同樣的初始條件下分別用EKF、SDREF和MSDREF算法對(duì)基于星間相對(duì)位置矢量測(cè)量的自主導(dǎo)航系統(tǒng)進(jìn)行仿真,MSDREF的參數(shù)γ取0.3。
定義位置誤差和速度誤差分別為:
將本算例中自主導(dǎo)航系統(tǒng)在3種算法下的估計(jì)結(jié)果進(jìn)行對(duì)比,如表2所示。可以看出EKF的計(jì)算時(shí)間約是SDREF和MSDREF的7~8倍,這與前述對(duì)3種算法計(jì)算量的分析吻合。在穩(wěn)態(tài)誤差方面,SDREF由于軌道模型非線性程度不高且不存在線性化誤差,其估計(jì)精度與EKF基本相當(dāng);而MSDREF根據(jù)系統(tǒng)能觀度的變化對(duì)濾波協(xié)方差陣進(jìn)行在線調(diào)整,改善了EKF和SDREF對(duì)能觀度敏感的問(wèn)題,位置和速度估計(jì)的穩(wěn)態(tài)誤差是EKF的21%。
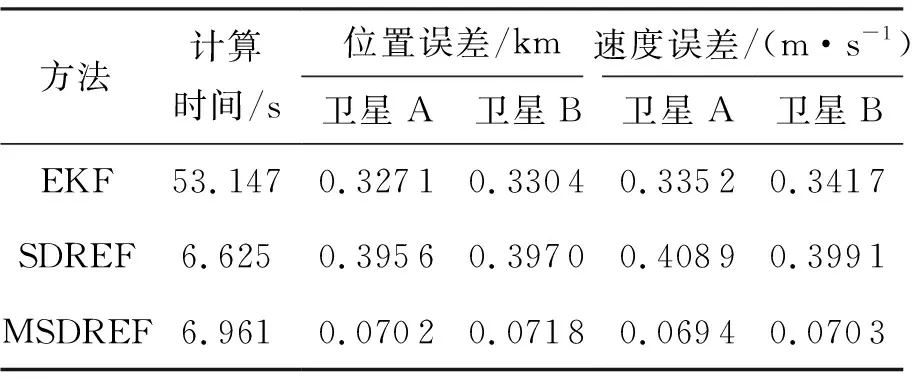
表2 EKF、SDREF和MSDREF估計(jì)結(jié)果對(duì)比
6 結(jié)束語(yǔ)
本文針對(duì)分布式衛(wèi)星系統(tǒng)高精度自主導(dǎo)航的任務(wù)需求,選取典型的基于星間相對(duì)位置觀測(cè)的雙星模型,采用SDREF算法對(duì)自主導(dǎo)航系統(tǒng)進(jìn)行估計(jì),通過(guò)數(shù)學(xué)證明了在滿足一定條件時(shí),SDREF的計(jì)算量顯著小于EKF的結(jié)論。文章提出了一種改進(jìn)的SDREF算法,根據(jù)系統(tǒng)能觀度強(qiáng)弱對(duì)標(biāo)準(zhǔn)SDREF算法進(jìn)行在線修正,并選取一組近距離雙星編隊(duì)任務(wù)進(jìn)行數(shù)學(xué)仿真,對(duì)EKF、SDREF和MSDREF的估計(jì)結(jié)果進(jìn)行了對(duì)比。在相同條件下,MSDREF的估計(jì)精度明顯優(yōu)于SDREF和EKF,且保持了SDREF計(jì)算量小的優(yōu)點(diǎn)。本文研究結(jié)果可以為未來(lái)分布式衛(wèi)星工程實(shí)施中高精度自主導(dǎo)航算法的設(shè)計(jì)提供重要參考。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32