長骨骨干骨折復位機器人研究現狀與展望
2019-01-18 11:45:12張肖在祁富貴王鵬飛張自啟李雪陽
醫療衛生裝備 2019年1期
史 剛,張肖在,祁富貴,王鵬飛,張自啟,殷 悅,李雪陽,焦 騰*
(1.空軍軍醫大學軍事生物醫學工程學系,西安 710032;2.聯勤保障部隊第942醫院醫學工程科,銀川 750000;3.空軍軍醫大學第一附屬醫院創傷骨科,西安 710032)
0 引言
骨折是創傷骨科最常見的外科創傷,特別是四肢長骨骨折,多發于工業生產、建筑工地或交通事故中,醫學上將這一類損傷稱為高能損傷。近年來,隨著人類社會生產、建設、交通和生活節奏的加快,此類損傷呈明顯增加趨勢。四肢骨折治療理念隨著抗生素的應用和醫療科學技術的發展而更新,主要經歷了保守治療、20世紀60年代AO/ASIF國際內固定研究學會(Association for the Study of Internal Fixation)提出的 AO(arbeitsgemeinschaft für osteosythese)治療原則和90年代Gerber與Palmar等提出的生物學接骨術(biological osteosynthesis,BO)治療原則 3個階段[1-3]。
近年來,交鎖髓內釘治療四肢長骨骨干骨折已經成為標準治療方法[4]。髓內釘治療方法中心固定的方式在對抗應力方面相比鋼板固定方法有明顯優勢,同時復位固定也在遠離骨折部位的骨骺端附近進行,有效保護了骨折局部血運。但由于該治療方法采用微創閉合復位,術中需多次透視,手術醫生和骨折患者放射性暴露時間長達158~316 s[5],增加了輻射風險。另有文獻報道,閉合復位加髓內釘內固定治療骨折在矢狀面和冠狀面上對位不良占2%~18%[6],通過術后CT檢查證實,超過10°的旋轉畸形發生率高于40%[7]。當骨折復位旋轉畸形超過10°時就會對患者的生活產生明顯的影響,情況嚴重時需要再次手術糾正。
如何獲得準確、穩定的復位,同時減少復位過程中的透視次數,降低醫患雙方的輻射風險成為亟須解決的問題。由于四肢長骨周圍均包裹有各類運動的肌群、神經和軟組織,復位過程需要克服強有力的肌肉收縮牽拉力[8],現有的外科手術機器人均不能滿足要求,因此,國內外相關機構的研究人員進行了不同的嘗試,研究開發了多種骨折手術機器人,各項研究取得了一定的進展和成果。現就這些相關研究進展和取得的結果作一綜述。
1 研究現狀
醫療手術機器人是集機器人、醫學、運動控制學、人工視覺、計算機信息技術、醫學圖像處理技術、人因工程學、信號傳輸與控制、軟件工程學等諸多學科領域于一體的多學科交叉融合研究結果[9]。研究人員巧妙地將機器人的控制精確、運行穩定、無生理性抖動、可重復性好、抗疲勞等特征與外科醫療技術相結合,設計出不同功能的醫療手術機器人,目前已經延伸到骨科的多個專業,包括創傷、脊柱、關節、運動醫學、骨腫瘤等,如ACROBOT和用于髖臼打磨置換的ROBODOC和CASPAR等[10]。由于長骨骨干骨折治療的復位機器人運行時需要承受一定的負荷[11-12],并且需要足夠的運動空間以完成復位動作,與目前其他外科領域應用的機器人工作時幾乎無負荷不同[13],研發技術難度高,暫無廣泛推廣應用的長骨骨干骨折復位機器人。
1.1 基于Stewart平臺以及其演變結構的并聯式長骨骨干骨折復位機器人
Stewart平臺是英國高級工程師Stewart在1965年研制的[14],該平臺主要由6根并聯排列的可伸縮連桿連接上下2個平面,通過調整6個連桿的長度可以實現2個平面6個自由度的精確運動控制。由于這2個平面之間沒有固定的連接軸,該模型可以在運動空間范圍內完成較為復雜的動作。該平臺主要應用在數學和工程學領域,尤其是空間動力方面的研究,例如用于訓練飛行員的直升機空間運動模擬[15-16],另外Stewart教授指出其也可應用于醫療領域。
1994年,美國骨科醫生Taylor及其弟弟合作,將Stewart平臺原理與Ilizarov外固定架技術進行完美結合,設計出一款六自由度的骨科用矯正支架系統,被稱為泰勒空間支架(Taylor spatial frame,TSF)[17-18]。該系統主要包括兩大部分,一部分為用于矯正的2個環和6根可伸縮螺桿,另一部分為運算程序系統。該系統可根據用戶輸入的調整目標數據自動計算出6個可伸縮螺桿的對應目標長度,用戶根據系統生成的矯正處方,定期調整6個螺桿的長度即可達到矯形治療的目的。TSF在臨床上的成熟應用主要在骨折畸形愈合和畸形骨病的慢性矯正、骨缺損的牽張成骨等方面,配合截骨手術,在臨床治療中取得了較滿意的療效[17,19-21]。
英國拉夫堡大學(Loughborough University)的研究人員Bouazza-Marouf等在20世紀90年代中后期將計算機和機械控制技術與外科骨折治療方法相結合,設計了一種基于透視圖像的機器人視覺系統和專用復位機械手(如圖1所示),論證了醫用機器人技術的可行性,闡述了機器人復位的基本要求,并就相關安全和無菌要求進行了討論[22]。但并未見進一步實施骨折復位的介紹和實驗結果報道[23]。
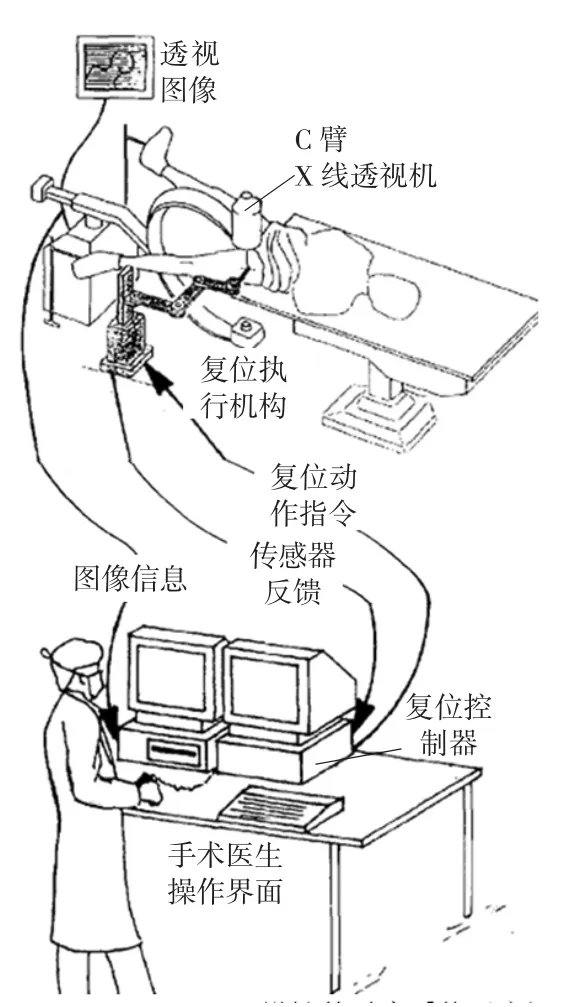
圖1 Bouazza-Marouf等設計的手術系統[22]
21世紀初,德國漢堡創傷中心的Seide教授以Stewart平臺和TSF技術為基礎進行改進,設計出了六軸自動固定器(如圖 2所示)[24]。該系統在6根驅動桿上安裝了電動驅動裝置以及載荷感應裝置,醫生通過軟件輸入目標動作,計算機經過計算自動對外架進行控制,來進行畸形和骨折復位的急性操作以及骨愈合應力情況的測量。
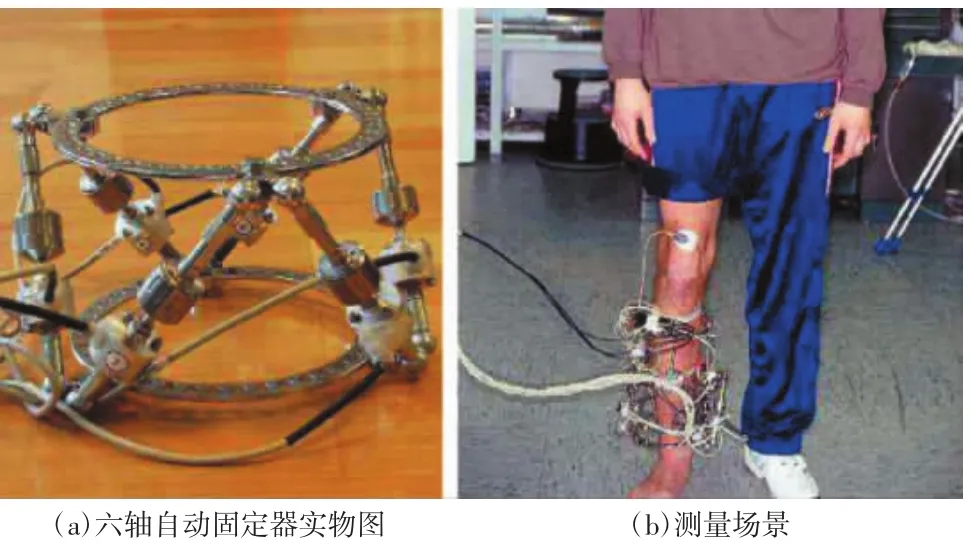
圖2 Seide教授設計的六軸自動固定器及測量場景[24]
2002年,以色列耶路撒冷的希伯來大學計算機與工程學院和哈德薩大學及海法理工大學等研究機構共同分析了現有骨折復位治療技術的局限性,設計開發出長骨骨折的髓內釘鎖定機器人輔助系統[25-26],并討論了計算機輔助外科系統的目標和功能[27]。該系統主要輔助確定髓內釘鎖孔位置,可減少術中透視次數和手術醫生輻射風險,縮短手術時間。
解放軍總醫院唐佩福團隊設計了外側帶有定位標記球結構的Stewart平臺(如圖3所示)[28-29],在CT掃描三維重建圖像的基礎上編寫相關軟件功能模塊,對平面位置進行識別和控制,以健側骨為參考進行復位操作,融入視覺伺服控制進行實時監測和安全性反饋,并完成了模型骨實驗和離體牛股骨實驗,重復10次實驗結果顯示軸向位移平均誤差為1.24 mm,側向位移平均誤差為1.19 mm,側方成角平均為2.34°,內旋/外旋角度平均為2.83°,復位結果滿足臨床醫學應用要求[30-34]。此外該課題組還測試了不同參數配置下平臺的運動范圍極值,結果顯示平臺空間運動范圍與平臺直徑成反比,與連接桿可伸縮量成正比[30-34]。由于系統空間運動范圍有限,對于錯位較大的骨折或骨畸形治療時需要先進行適當的牽引調整,之后再固定復位。

圖3 解放軍總醫院唐佩福團隊設計的機器人系統[28-29]
哈爾濱工業大學蔡鶴皋院士指導課題組成員以6-PTRT并聯型結構為基礎,結合正骨技術,確定了相應參數指標,設計了面向正骨復位的機器人系統(如圖4所示),分析了機器人運動正逆解相關問題,并對復位方法進行了模型實驗、仿真研究和尸體標本實驗,實驗結果顯示復位結果能夠滿足正骨復位的需求[35]。由于尸體的肌肉是僵硬的,不能主動收縮,與實際臨床活體麻醉狀態活體肌肉和軟組織存在差異,未見進一步臨床實驗的報道。

圖4 哈爾濱工業大學設計的骨折復位機器人系統[35]
1.2 基于串聯式工業用機器人的長骨骨干骨折復位機器人
2004年,德國雷根斯堡大學與應用科學大學合作,在眾多醫療機器人和工業機器人中根據負載能力和自身質量等多種因素綜合匹配選擇,最終選擇以St?ubli RX130工業機器人為基礎進行改造,設計了股骨干骨折復位機器人RepoRobo(如圖5所示)[36]。其工作方式是通過安裝在機器人末端的抓持器與固定在股骨一端的鋼針形成穩定連接,實現六自由度直接牽拉和旋轉復位操作,同時通過力傳感器實現對復位力的監測。盡管只進行了股骨骨折模型復位實驗,但對于長骨骨折復位過程中可能涉及到的問題進行了論證,證明了該系統用于骨折復位的可行性。
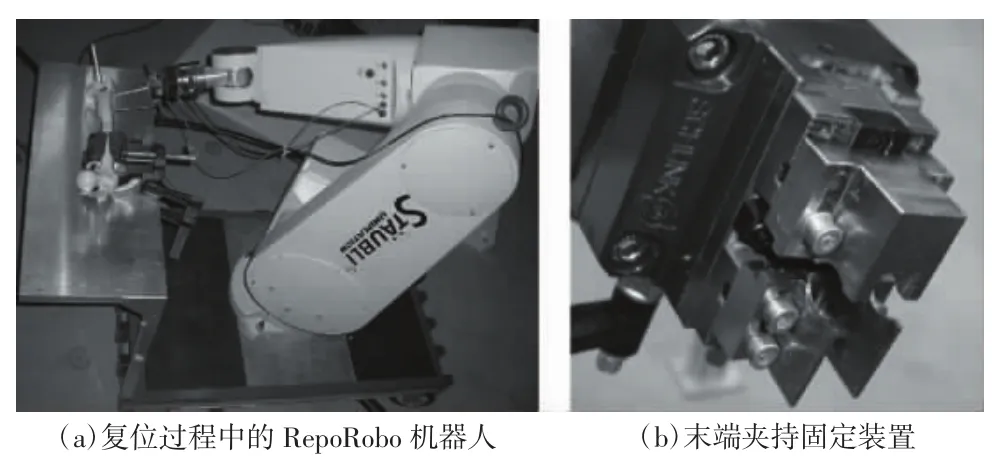
圖5 德國雷根斯堡大學與應用科學大學設計的骨折復位機器人RepoRobo[36]
2005年,德國漢諾威醫學院創傷科Gosling教授與德國布倫瑞克工業大學機器人與過程控制研究所Westphal教授合作,設計了一套帶有觸覺和距離反饋的復位控制系統(如圖6所示)[37]。該系統使用一個操縱桿作為控制輸入設備,利用2臺正交的攝像機獲取增強的圖像、1臺工業用機器人RX90作為復位執行機構。在不同條件下進行了15例合成股骨骨折復位操作,經過比對復位結果證明了在機器人輔助條件下可以減少射線暴露時間并且可獲得更高的復位精度。但該研究只進行了模型骨的實驗,未見后續實驗報道[38]。
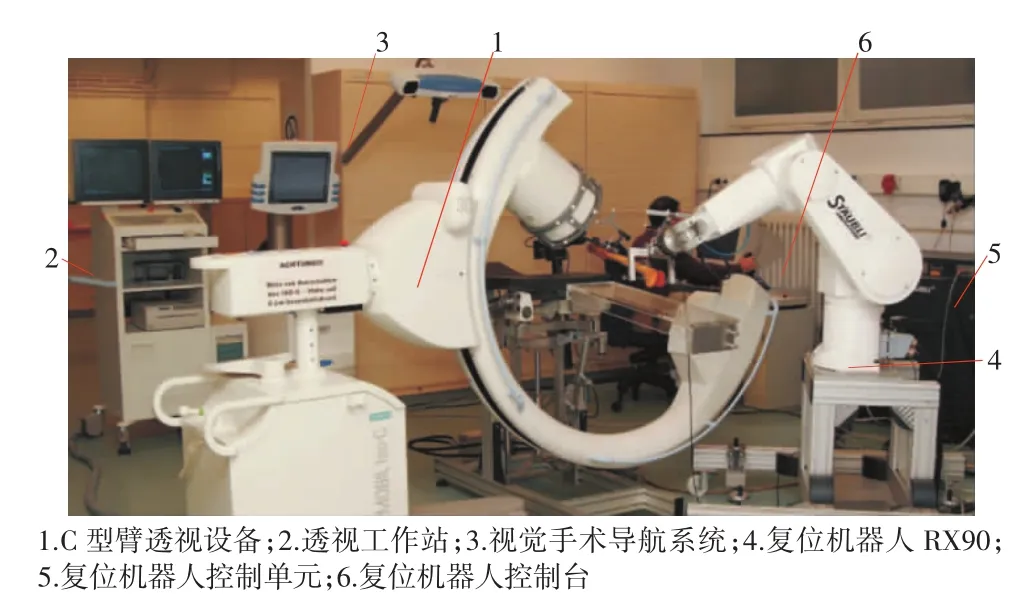
圖6 德國漢諾威醫學院和布倫瑞克工業大學機器人與過程控制研究所設計的骨折復位機器人系統[37]
2007年11月,上海市第六人民醫院骨科阮志勇在德國漢諾威醫學院以法國法韋日TEC-systems公司生產的RX 90CR工業機器人為基礎,配合德國brainlab導航系統、力量扭矩傳感器和西門子三維C臂系統的SiremobilIso C 3D設備,對14具不帶軟組織的成人正常股骨標本進行復位實驗,實驗中先獲取骨折前股骨和動態追蹤標志的相對位置,之后制作骨折模型,操作者通過三維C臂獲取骨折位置信息圖像,根據計算機系統生成的實時三維模擬圖像來指導操作手柄主從式控制機器人完成復位[13]。實驗總計進行了144次,結果顯示A型骨折復位軸向分離平均值為1.08 mm,側方移位平均值為1.61 mm,內外翻角度平均值為1.09°,前后屈角度平均值為1.42°,內旋/外旋角度平均值為1.37°,各項參數顯示優于臨床現用方法。
1.3 其他自主設計結構和控制方式的長骨骨干骨折復位機器人
2008年,日本東京大學和大阪大學聯合研制了用于輔助股骨骨折復位的手術機器人FRAC-Robo(如圖7所示)[39],其工作方式為在患者骨折遠端與患者足部固定,可提供平移、牽引、旋轉6個自由度的操作,輔助醫生完成牽引復位。該裝置有效減輕了手術人員的勞動強度,但骨折近端沒有完全固定,在牽引旋轉骨折遠端的過程中,由于肌肉和軟組織的牽拉骨折近端也會發生一定的旋轉,并且此變化不可控,因此不能很好地控制骨折兩端進行精準地相對運動,并且在固定過程中容易再次丟失復位,復位精度依然受手術醫生經驗影響較大。
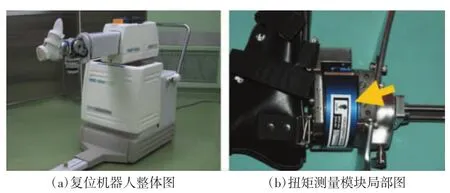
圖7 日本東京大學與大阪大學設計的骨折復位機器人系統FRAC-Robo[39]
北京積水潭醫院創傷骨科自2001年開始與北京航空航天大學機器人研究所合作國家高技術研究發展計劃(863計劃)重大項目,共同對CAOS(computer assisted orthopaedics surgery)應用技術進行研究,聯合研制了具有六自由度的小型模塊化復位機器人系統(如圖8所示),由骨折復位功能模塊、機器人定位功能模塊、計算機規劃控制模塊組成[40]。該系統經過模型骨、尸體骨、尸體3個階段的實驗研究[41],由參加研發的醫生親自實施臨床手術,總結了操作經驗,不斷優化操作程序。該系統是脛骨骨折專用裝置,共完成臨床脛骨骨折手術40例,均獲得良好的骨折復位,且遠端鎖釘均一次鎖定成功[42]。
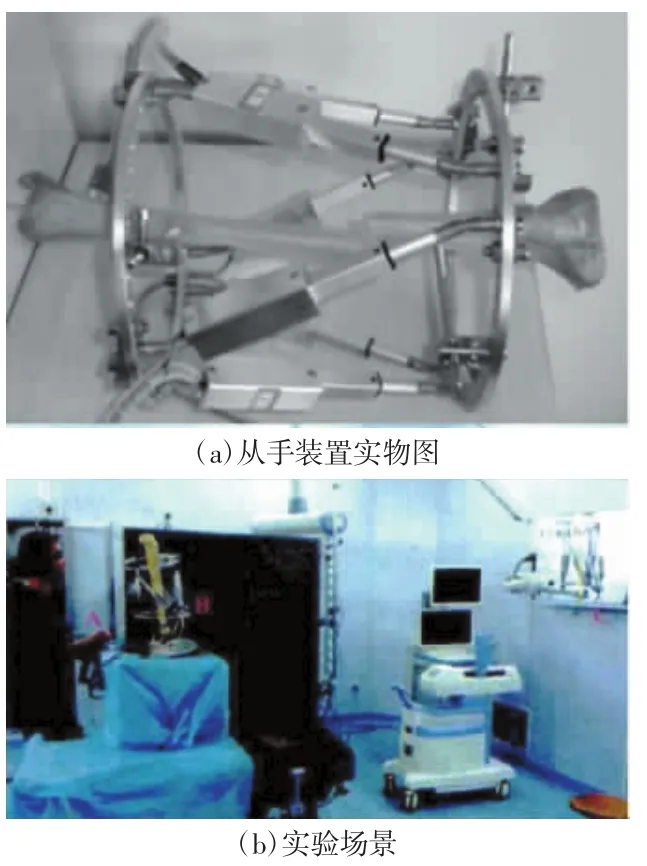
圖8 北京積水潭醫院與北京航空航天大學機器人研究所設計的骨折復位機器人系統[40]
2016年,原第四軍醫大學生物醫學工程學院與其第一附屬醫院創傷骨科合作,研究設計出一款六自由度的數字化的股骨干骨折復位機器人系統(如圖9所示),并通過大量實驗對系統進行了多次改造,目前該系統在完成模型骨實驗的基礎上進行了2例成年山羊活體在體骨折復位實驗,取得了良好的復位結果,進一步的臨床實驗正在辦理審批中[43]。
2 主要進展
CAOS指計算機輔助導航骨科手術,目前比較認同的適宜應用CAOS的臨床手術有骨盆后環骨折及骶髂螺釘內固定、骨盆前環和髂骨骨折、髖臼骨折、股骨頸及轉子間骨折、髓內釘手術、長骨及骨盆截骨術、股骨垢滑脫等[44],暫不包括長骨骨干骨折的治療。為了盡快彌補計算機輔助機器人技術在長骨骨干骨折治療領域應用的不足,近年來,國內外相關研究機構開展了深入研究,在復位機器人機械結構模型、圖像處理和導航等關鍵技術領域取得了一些新的進展和突破。
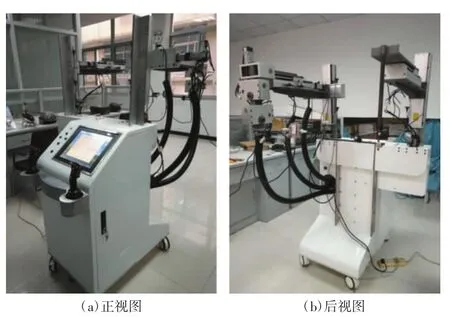
圖9 原第四軍醫大學與其第一附屬醫院設計的骨折復位機器人系統[43]
2.1 復位執行機構模型的發展
骨折復位執行機構模型從最初在工業機器人基礎上改造,逐步發展,經過對以Stewart平臺為基礎的各種不同結構的改進,取得了很大進步。Stewart平臺能夠提供精確平穩的復位和治療動作,是完成高精度的小范圍局部操作的最優選擇之一,但由于受到運動空間的限制,單獨在長骨骨折復位治療中應用的不多。骨折復位執行機構是復位動作的末端執行單元,其運行的準確性直接關系到復位系統的準確性,同時,由于復位過程中應力較大,必須科學設計、合理選材以保證復位執行單元的剛性。近年來,相關研究機構不斷嘗試創新,自主設計了用于長骨骨折復位治療的機器人結構模型,取得不錯的成績。
2.2 相關圖像處理及導航技術的發展
傳統骨折手術中手術醫生只能根據實時透視獲取的二維圖像結合自身手術經驗推測患者骨折端的立體位置關系,以便進一步操作,手術精度因人而異,很難控制。
近年來,圖像處理技術取得了很大進步,主要體現在圖像識別、分割、重建、配準、融合和傳輸等方面。圖像識別分割技術已經達到可形成包含解剖結構和生理功能的重建圖像水平,為手術醫生提供了更加直觀、生動的畫面;在配準定位融合方面,解剖標志注冊技術(anatomical registration)已發展成熟,縮短了配準融合時間的同時大大提高了精度[45]。
隨著圖像處理技術的進步,基于計算機運算的機器人定位方法也得到了發展提高,借助定位機器人,手術醫生可以通過虛擬現實圖像快速準確地進行髓內釘鎖定等操作。其他應用的導航技術還有光學導航、電磁定位導航和超聲定位導航。光學導航是最真實的導航技術,但手術中往往由于各種因素遮擋導致其不能很好地發揮作用,這個不足可以通過合理地布局和規劃進行改善。電磁導航是一種無輻射、快速、精準可靠的方式[46],主要用于髓內釘鎖定孔的定位,此外,還可以提供顯示髓內釘遠端鎖定孔的位置及方向的三維實時位姿情況[47-48]。這些技術的發展有力地保證和提高了手術的安全性和準確性,減少了射線暴露時間。
3 展望
目前,部分長骨骨干骨折復位機器人的研究成果已經進入臨床實驗階段,但距離大范圍推廣使用還有一定差距,復位機器人的結構模型和配套的圖像處理技術及導航技術還有進一步提高的空間。
長骨骨折復位機器人發展可在這幾個方向嘗試:(1)發展多模態示蹤導航系統。在提高抗干擾能力的前提下,以光學示蹤導航為主、虛擬現實技術為輔,提高診斷的準確性和手術的安全性、精確性。(2)設計更加科學的復位結構模型。既要擁有足夠的剛性以對抗復位過程中肌肉和組織的牽引力,又要保證復位動作的精確靈活。(3)控制單元與執行單元分開。引進最新的無線通信控制和網絡技術,減少人員X線暴露時間,也可進行遠程操作,預計可實現太空、海底、極地、邊遠地區等異地控制[49],避免轉診,節約醫療成本,充分發揮有限的專家資源,提高醫療效率。(4)改變供電模式。應用最新的電池技術,選用可快速更換和快速充電的電池模塊,避免使用線纜供電,一方面有利于消毒滅菌,另一方面節省有限的手術空間。(5)實現多種工作模式。實現全自動、半自動、主從式控制等多種工作控制模式自由切換,滿足不同手術醫生的使用習慣。(6)模塊化設計。針對不同骨折類型,可快速更換模塊,設計標準接口,預留DICOM圖像接口,遠程圖像、指令傳輸接口等。
從目前國內外研究和實驗進展情況來看,長骨骨干骨折復位機器人的發展比其他領域醫療機器人緩慢,但這并不能限制此項技術的發展,可以預見在未來幾年,將有多種機器人系統應用于長骨骨干骨折臨床復位實驗,在提高骨折復位精度、減少X線暴露時間、減小手術創傷、降低手術醫生的體力支出方面作出巨大貢獻。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
河北畫報(2020年10期)2020-11-26 07:20:50
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中國衛生標準管理(2015年3期)2016-01-14 03:41:47
中國中醫藥現代遠程教育(2014年13期)2014-03-01 04:26:36