一種改進(jìn)的異步電機(jī)模型預(yù)測(cè)直接轉(zhuǎn)矩控制方法
2019-01-08 02:13:38宋文祥樂勝康吳曉新
關(guān)鍵詞:模型
宋文祥,樂勝康,吳曉新,阮 毅
(上海大學(xué)機(jī)電工程與自動(dòng)化學(xué)院,上海200444)
在交流電機(jī)高性能驅(qū)動(dòng)場(chǎng)合中,矢量控制[1]和直接轉(zhuǎn)矩控制[2-5]得到了廣泛應(yīng)用.這兩種控制方法的不同之處在于,直接轉(zhuǎn)矩控制是用轉(zhuǎn)矩和磁鏈滯環(huán)控制器來直接控制電機(jī)的轉(zhuǎn)矩和磁鏈,而矢量控制是通過控制電機(jī)定子電流的d-q軸分量來控制電機(jī)的轉(zhuǎn)矩和磁鏈.所以直接轉(zhuǎn)矩控制的動(dòng)態(tài)性能要比矢量控制的動(dòng)態(tài)性能好,但是直接轉(zhuǎn)矩控制存在轉(zhuǎn)矩脈動(dòng)和開關(guān)頻率不固定的問題[6-7].針對(duì)轉(zhuǎn)矩脈動(dòng)問題,文獻(xiàn)[8]給出一種基于空間矢量調(diào)制的直接轉(zhuǎn)矩控制方法,有效地減小了異步電機(jī)的轉(zhuǎn)矩脈動(dòng).直接轉(zhuǎn)矩中開關(guān)頻率不固定問題的根本原因是采用了滯環(huán)控制器,而文獻(xiàn)[6]采用一種新的轉(zhuǎn)矩磁鏈控制器解決了這一問題.
模型預(yù)測(cè)控制(model predictive control,MPC)是一種非線性預(yù)測(cè)控制策略,處理非線性約束的適應(yīng)能力較強(qiáng),是利用給定的價(jià)值函數(shù)作為優(yōu)化準(zhǔn)則,使得控制極具靈活性[9].由于模型預(yù)測(cè)控制需要在線實(shí)時(shí)求解,對(duì)控制器的性能要求比較高,以往受制于微處理器的計(jì)算能力,使得模型預(yù)測(cè)控制在電機(jī)驅(qū)動(dòng)領(lǐng)域鮮有實(shí)際應(yīng)用[10-11].近年來,隨著數(shù)字信號(hào)處理器的發(fā)展,使得模型預(yù)測(cè)控制應(yīng)用于電機(jī)驅(qū)動(dòng)領(lǐng)域成為可能.文獻(xiàn)[12]最先將模型預(yù)測(cè)控制應(yīng)用到電機(jī)驅(qū)動(dòng)領(lǐng)域中.事實(shí)上,傳統(tǒng)雙離合變速器(dual clutch transmission,DCT)也被廣泛解釋為一種預(yù)測(cè)控制策略,但缺乏明確的預(yù)測(cè)模型和優(yōu)化準(zhǔn)則,只能粗略地預(yù)測(cè)下一步開關(guān)動(dòng)作.
文獻(xiàn)[13]給出一種長(zhǎng)預(yù)測(cè)范圍的模型預(yù)測(cè)直接電流控制方法,能夠在保證電機(jī)運(yùn)行性能的前提下顯著降低逆變器的開關(guān)頻率.文獻(xiàn)[14]將有限控制集模型預(yù)測(cè)轉(zhuǎn)矩控制和無差拍控制相結(jié)合,選擇出最優(yōu)的開關(guān)矢量,有效地改善了傳統(tǒng)DCT的轉(zhuǎn)矩性能.有限控制集模型預(yù)測(cè)轉(zhuǎn)矩控制是一種利用系統(tǒng)離散模型來預(yù)測(cè)系統(tǒng)未來狀態(tài)的控制方法,利用價(jià)值函數(shù)代替調(diào)制器以得到最優(yōu)的開關(guān)矢量[15-17].文獻(xiàn)[18]針對(duì)逆變器帶阻感負(fù)載的電流控制,結(jié)合逆變器有限個(gè)開關(guān)矢量形成一種有限控制集MPC方法,取得了較為理想的控制效果.文獻(xiàn)[19]基于有限控制集MPC思想,給出一種轉(zhuǎn)矩預(yù)測(cè)控制方法,通過預(yù)測(cè)下一采樣周期的磁鏈和轉(zhuǎn)矩,以轉(zhuǎn)矩紋波為價(jià)值函數(shù),求解出最優(yōu)的開關(guān)矢量和開關(guān)切換時(shí)刻,該方法能夠有效地減小轉(zhuǎn)矩脈動(dòng),但是會(huì)帶來比較高的開關(guān)頻率.
本工作給出了一種改進(jìn)的模型預(yù)測(cè)直接轉(zhuǎn)矩控制(model predictive direct torque control,MPDTC)方案,通過設(shè)計(jì)一種優(yōu)化矢量選擇器,可以得到給定電壓矢量,然后判斷給定電壓矢量所處的扇區(qū),從而獲得需要進(jìn)行價(jià)值函數(shù)優(yōu)化求解的3個(gè)電壓矢量.針對(duì)控制延時(shí)的影響,采用延時(shí)補(bǔ)償控制來提高系統(tǒng)的控制性能.此外,為了降低逆變器的開關(guān)頻率,在價(jià)值函數(shù)中加入對(duì)絕緣柵雙極型晶體管(insulated gate bipolar transistor,IGBT)開關(guān)切換次數(shù)的約束,形成了一種低開關(guān)頻率模型預(yù)測(cè)直接轉(zhuǎn)矩控制(low switching frequency model predictive direct torque control,LSFMPDTC)方法,能有效降低逆變器的開關(guān)頻率.最后,通過仿真和實(shí)驗(yàn)對(duì)傳統(tǒng)與改進(jìn)的MPDTC性能作了對(duì)比評(píng)估.
1 異步電機(jī)數(shù)學(xué)模型
以電機(jī)定子磁鏈ψs和定子電流is為狀態(tài)變量,兩相靜止α-β坐標(biāo)系下的異步電機(jī)動(dòng)態(tài)數(shù)學(xué)模型可表示為
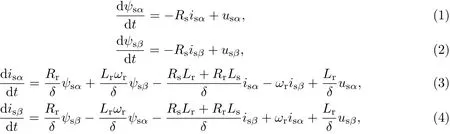
式中: ψsα,ψsβ分別為定子磁鏈α,β 軸分量,isα,isβ分別為定子電流α,β軸分量,usα,usβ分別為定子電壓α,β軸分量;Rs,Rr分別為定、轉(zhuǎn)子電阻;Ls,Lr,Lm分別為定、轉(zhuǎn)子電感和互感;ωr為轉(zhuǎn)子轉(zhuǎn)速;δ=LsLr-L2m.
定子磁鏈幅值與電磁轉(zhuǎn)矩可分別表示為

式中,np為電機(jī)極對(duì)數(shù),?表示叉乘.
2 傳統(tǒng)模型預(yù)測(cè)直接轉(zhuǎn)矩控制
2.1 控制系統(tǒng)結(jié)構(gòu)
圖1為傳統(tǒng)模型預(yù)測(cè)直接轉(zhuǎn)矩控制系統(tǒng)框圖,圖中IM表示感應(yīng)電機(jī)(induction motor).與傳統(tǒng)直接轉(zhuǎn)矩控制相比,外環(huán)同樣是轉(zhuǎn)速環(huán),通過比例積分(proportion integral,PI)調(diào)節(jié)器獲得轉(zhuǎn)矩的參考值.所不同的是,模型預(yù)測(cè)直接轉(zhuǎn)矩控制的內(nèi)環(huán)為模型預(yù)測(cè)控制器,代替了傳統(tǒng)直接轉(zhuǎn)矩控制中的磁鏈和轉(zhuǎn)矩滯環(huán).模型預(yù)測(cè)控制器由轉(zhuǎn)矩和磁鏈的預(yù)測(cè)模型和價(jià)值函數(shù)構(gòu)成,通過預(yù)測(cè)模型得到磁鏈和轉(zhuǎn)矩的預(yù)測(cè)值,由價(jià)值函數(shù)評(píng)價(jià)出最優(yōu)的開關(guān)矢量,最后將最優(yōu)的開關(guān)矢量作用于逆變器.
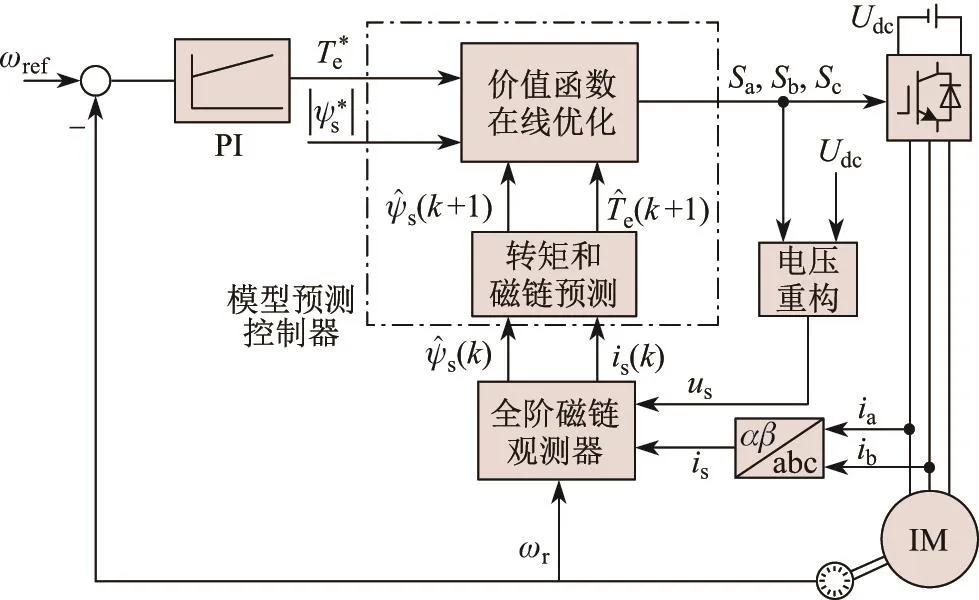
圖1 傳統(tǒng)的模型預(yù)測(cè)直接轉(zhuǎn)矩控制框圖Fig.1 Block diagram of conventional MPDTC
2.2 全階磁鏈觀測(cè)器
磁鏈觀測(cè)的精度會(huì)直接影響模型預(yù)測(cè)直接轉(zhuǎn)矩控制系統(tǒng)的性能,為了提高磁鏈觀測(cè)的精度,本工作將全階磁鏈觀測(cè)器引入控制系統(tǒng)中.所采用的全階磁鏈觀測(cè)器數(shù)學(xué)模型[20]如下:


其中b為負(fù)常數(shù).
2.3 預(yù)測(cè)模型
前向歐拉離散化方法可以近似表示為

式中,Ts為系統(tǒng)的采樣周期.
為了預(yù)測(cè)定子電流和定子磁鏈下一時(shí)刻的值,可采用式(9)的前向歐拉法對(duì)式(1)~(4)分別進(jìn)行離散化,得到定子電流和定子磁鏈的預(yù)測(cè)模型如下:
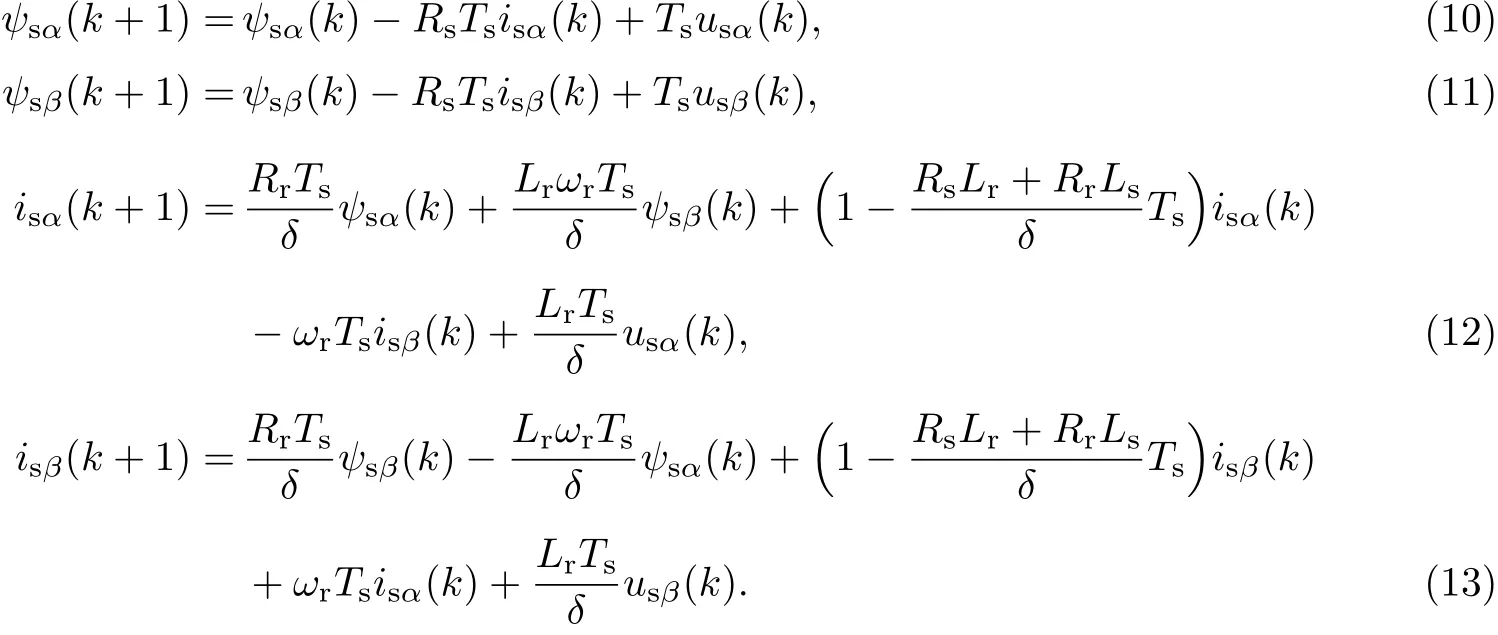
將式(10)和(11)代入式(5)中,可得定子磁鏈幅值|ψs|的預(yù)測(cè)值為

將式(10)~(13)代入式(6)中,可得轉(zhuǎn)矩Te的預(yù)測(cè)值為

對(duì)于兩電平電壓型逆變器來說,若在一個(gè)控制周期內(nèi)只作用一個(gè)電壓矢量,則總共有8個(gè)電壓矢量u0,u1,···,u7可供選擇.在逆變器第i個(gè)電壓矢量的作用下,由式(14)和(15)可以得到預(yù)測(cè)的定子磁鏈幅值|(k+1)|和轉(zhuǎn)矩(k+1).
2.4 價(jià)值函數(shù)優(yōu)化
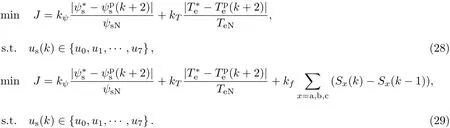
模型預(yù)測(cè)控制的價(jià)值函數(shù)具有靈活性和多樣性,在直接轉(zhuǎn)矩控制中,期望電機(jī)的轉(zhuǎn)矩和磁鏈能夠快速跟隨其給定值[11],所以在模型預(yù)測(cè)直接轉(zhuǎn)矩控制中,將磁鏈和轉(zhuǎn)矩的相對(duì)偏差作為價(jià)值函數(shù):

將式(16)作為價(jià)值函數(shù),可以實(shí)現(xiàn)磁鏈和轉(zhuǎn)矩快速跟隨給定值,但是逆變器的開關(guān)頻率較高,在中高壓的驅(qū)動(dòng)場(chǎng)合中,期望在保證控制性能的同時(shí)降低逆變器的開關(guān)頻率.相應(yīng)地,在價(jià)值函數(shù)中對(duì)開關(guān)切換次數(shù)進(jìn)行約束,低開關(guān)頻率模型預(yù)測(cè)直接轉(zhuǎn)矩控制(LSFMPDTC)的價(jià)值函數(shù)可以表示為

式中,Sx(k)為當(dāng)前時(shí)刻的開關(guān)狀態(tài),Sx(k-1)為前一時(shí)刻的開關(guān)狀態(tài),kf為IGBT開關(guān)切換次數(shù)的權(quán)重因子,通過增大kf的值可以有效降低逆變器的開關(guān)頻率,但是不能一味增大,否則會(huì)出現(xiàn)電機(jī)失控的情況.
3 改進(jìn)模型預(yù)測(cè)直接轉(zhuǎn)矩控制
3.1 優(yōu)化矢量選擇器
改進(jìn)的模型預(yù)測(cè)直接轉(zhuǎn)矩控制方案的結(jié)構(gòu)框圖如圖2所示,與傳統(tǒng)模型預(yù)測(cè)直接轉(zhuǎn)矩控制相比,增加了延時(shí)補(bǔ)償環(huán)節(jié)和優(yōu)化矢量選擇器來提高控制系統(tǒng)的性能.
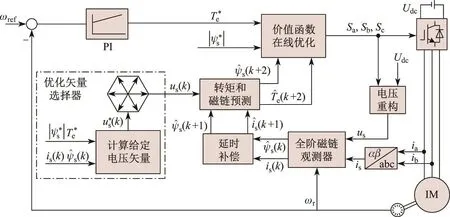
圖2 改進(jìn)的模型預(yù)測(cè)直接轉(zhuǎn)矩控制框圖Fig.2 Block diagram of improved MPDTC
考慮到兩電平逆變器存在8個(gè)電壓矢量,在價(jià)值函數(shù)優(yōu)化過程中,需要對(duì)這8個(gè)電壓矢量進(jìn)行優(yōu)化求解,這使得優(yōu)化求解過程的計(jì)算量顯著增加.為了降低優(yōu)化求解的計(jì)算量,本工作設(shè)計(jì)了一種優(yōu)化矢量選擇器,通過定子磁鏈的給定值求得給定的電壓矢量,使得在價(jià)值函數(shù)優(yōu)化過程中只需對(duì)給定電壓矢量所在扇區(qū)的3個(gè)電壓矢量進(jìn)行優(yōu)化求解即可,有效降低了優(yōu)化求解的計(jì)算量.下面對(duì)優(yōu)化矢量選擇器的設(shè)計(jì)過程進(jìn)行詳細(xì)描述.
電機(jī)的電磁轉(zhuǎn)矩可以用定子磁鏈ψs和轉(zhuǎn)子磁鏈ψr表示如下:

由式(18)可得定、轉(zhuǎn)子磁鏈之間的角度關(guān)系為


式(18)~(20)中所用到的轉(zhuǎn)子磁鏈?zhǔn)噶靠捎啥ㄗ哟沛満投ㄗ与娏饔?jì)算得到.

令ψsα(k+1)=,ψsβ(k+1)=,由式(10)和(11)可得參考電壓矢量的α-β坐標(biāo)分量為
3.2 延時(shí)補(bǔ)償
圖3是轉(zhuǎn)矩預(yù)測(cè)控制原理示意圖,其中實(shí)線為轉(zhuǎn)矩的實(shí)際軌跡,虛線為轉(zhuǎn)矩的預(yù)測(cè)軌跡.為了簡(jiǎn)化原理圖,只給出3個(gè)電壓矢量的轉(zhuǎn)矩預(yù)測(cè)圖形.圖3(a)為理想情況下的轉(zhuǎn)矩預(yù)測(cè)控制,在這種情況下控制器的計(jì)算時(shí)間非常短,可以忽略不計(jì).最優(yōu)電壓矢量uop(k)在k時(shí)刻計(jì)算得到,并立即作用于逆變器.在實(shí)際應(yīng)用中,由于控制器的計(jì)算能力有限,控制算法將耗費(fèi)大量的計(jì)算時(shí)間,甚至是整個(gè)控制周期的時(shí)間.所以,在k時(shí)刻計(jì)算得到的最優(yōu)電壓矢量uop(k)要等到k+1時(shí)刻才作用于逆變器,而此時(shí)的電流采樣值和定子磁鏈已經(jīng)變?yōu)閕s(k+1)和ψs(k+1),這將使得控制系統(tǒng)始終存在一拍延時(shí),導(dǎo)致定子電流在參考值附近振蕩,增加了電流和轉(zhuǎn)矩的紋波[21](見圖3(b)).
為了解決這一拍延時(shí)的問題,需要在k時(shí)刻計(jì)算出k+1時(shí)刻的最優(yōu)電壓矢量uop(k+1),然后在k+1時(shí)刻作用于逆變器(見圖3(c)).這就需要在k時(shí)刻以is(k+1)和ψs(k+1)為初始條件對(duì)定子電流和定子磁鏈再向前預(yù)測(cè)一次,得到k+2時(shí)刻的定子電流和定子磁鏈預(yù)測(cè)值is(k+2)和ψs(k+2):
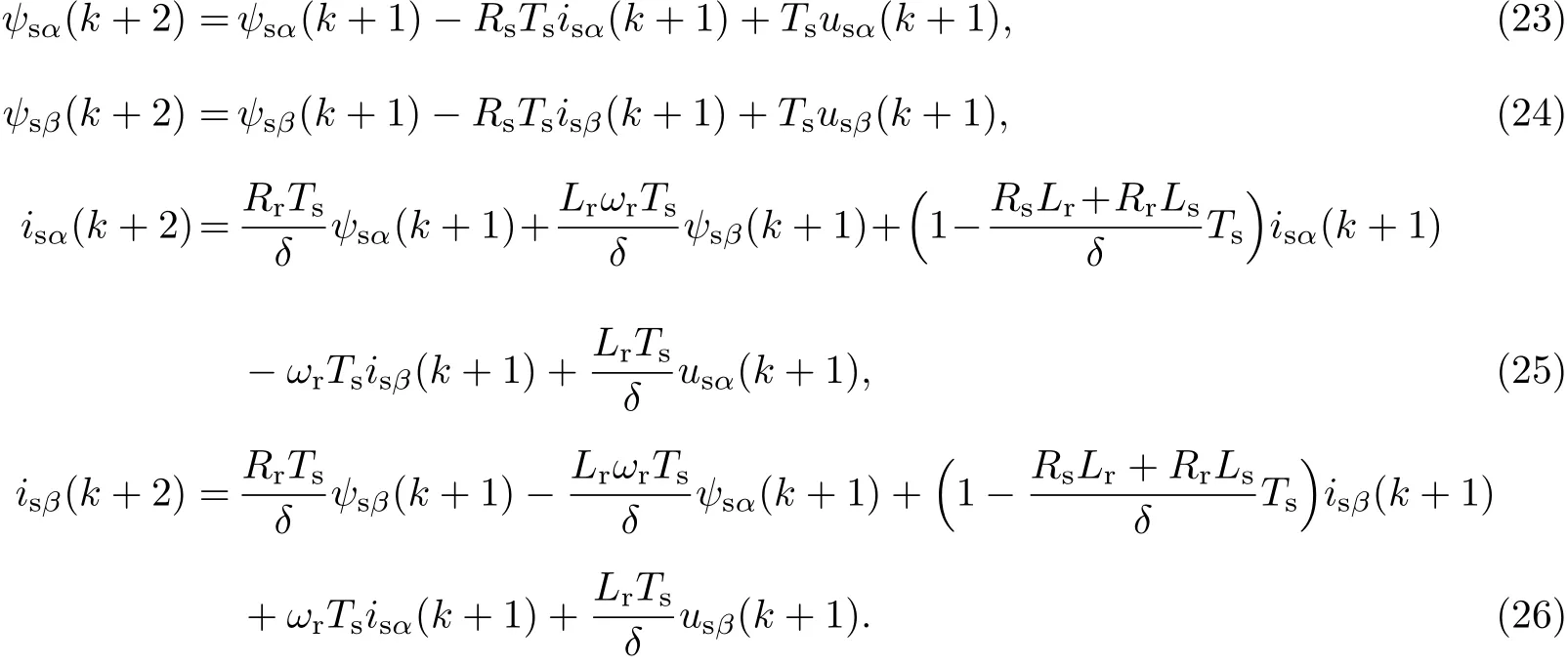
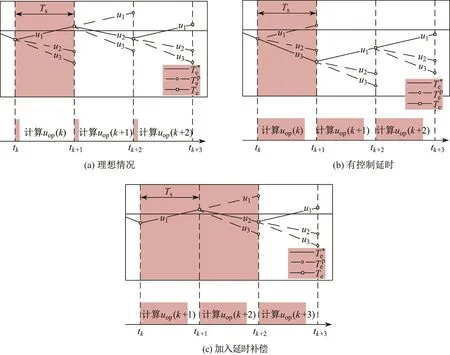
圖3 轉(zhuǎn)矩預(yù)測(cè)控制原理示意圖Fig.3 Schematic diagrams of the torque predictive control
由式(5)和(6)可得定子磁鏈幅值和電磁轉(zhuǎn)矩k+2時(shí)刻的預(yù)測(cè)值為
有延時(shí)補(bǔ)償?shù)腗PDTC和LSFMPDTC的價(jià)值函數(shù)可以分別表示為
4 仿真結(jié)果
為了驗(yàn)證本工作提出的改進(jìn)的MPDTC方法的正確性,利用Matlab/Simulink建立驅(qū)動(dòng)系統(tǒng)的仿真模型進(jìn)行仿真研究.仿真中MPDTC的磁鏈和轉(zhuǎn)矩權(quán)重因子為kψ=2,kT=1,LSFMPDTC的權(quán)重因子為kψ=2,kT=1,kf=0.1,電機(jī)的額定值和相關(guān)參數(shù)如表1所示,系統(tǒng)采樣頻率為6 kHz,Udc為540 V.
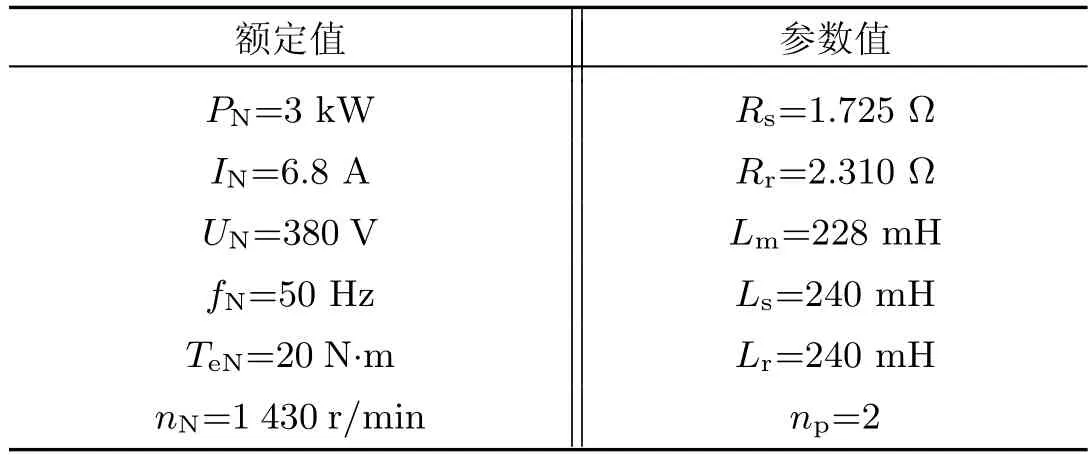
表1 異步電機(jī)驅(qū)動(dòng)系統(tǒng)相關(guān)參數(shù)Table 1 Parameters of induction machine drive system
圖4給出了無延時(shí)補(bǔ)償MPDTC、有延時(shí)補(bǔ)償MPDTC與有延時(shí)補(bǔ)償LSFMPDTC方法動(dòng)態(tài)過程對(duì)應(yīng)的定子電流、轉(zhuǎn)速、定子磁鏈和轉(zhuǎn)矩.仿真條件設(shè)定如下:電機(jī)空載起動(dòng),0.1 s轉(zhuǎn)速給定階躍突變?yōu)?00 r/min(10 Hz),0.4 s時(shí)負(fù)載轉(zhuǎn)矩突加至半載10 N·m,0.8 s轉(zhuǎn)速給定階躍突變?yōu)?00 r/min(20 Hz),1.2 s時(shí)突加額定負(fù)載20 N·m,1.4 s轉(zhuǎn)速給定階躍突變?yōu)? 200 r/min(40 Hz),仿真時(shí)間2 s.從圖中可以看出,加入延時(shí)補(bǔ)償?shù)腗PDTC和LSFMPDTC的轉(zhuǎn)矩和電流紋波顯著減小,系統(tǒng)的穩(wěn)態(tài)性能得到明顯改善.此外,無論是在動(dòng)態(tài)還是穩(wěn)態(tài)過程中,估計(jì)的定子磁鏈^ψsα和實(shí)際的定子磁鏈ψsα非常一致.
圖5給出了無延時(shí)補(bǔ)償MPDTC、有延時(shí)補(bǔ)償MPDTC與有延時(shí)補(bǔ)償LSFMPDTC方法的定子磁鏈軌跡和幅值.從圖中可以看出,無延時(shí)補(bǔ)償MPDTC的定子磁鏈脈動(dòng)大于有延時(shí)補(bǔ)償MPDTC的定子磁鏈脈動(dòng),這說明加入延時(shí)補(bǔ)償后能夠有效減小磁鏈脈動(dòng).而有延時(shí)補(bǔ)償LSFMPDTC的定子磁鏈脈動(dòng)也大于有延時(shí)補(bǔ)償MPDTC,這是由開關(guān)頻率降低所引起的.
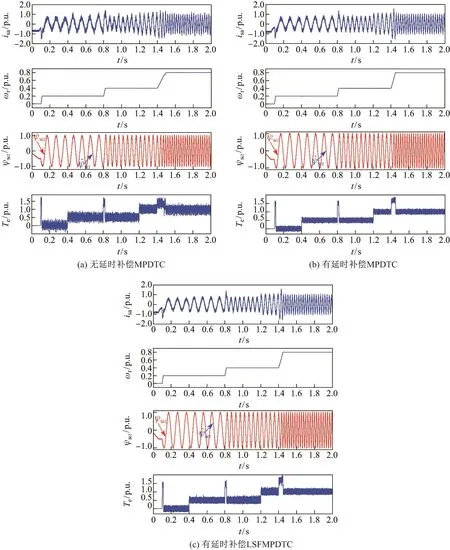
圖4電機(jī)定子電流、轉(zhuǎn)速、定子磁鏈和電磁轉(zhuǎn)矩動(dòng)態(tài)響應(yīng)Fig.4 Dynamic responses of stator current,rotor speed,stator flux and electromagnetic torque
圖6 給出了電機(jī)帶額定負(fù)載運(yùn)行在1 200 r/min時(shí),無延時(shí)補(bǔ)償MPDTC、有延時(shí)補(bǔ)償MPDTC與有延時(shí)補(bǔ)償LSFMPDTC方法對(duì)應(yīng)的電流isa和逆變器電壓ua的仿真結(jié)果.通過對(duì)比可以發(fā)現(xiàn),有延時(shí)補(bǔ)償LSFMPDTC的開關(guān)頻率低于其他兩種方法.通過對(duì)一段時(shí)間內(nèi)的開關(guān)次數(shù)計(jì)數(shù),可得到無延時(shí)補(bǔ)償MPDTC平均開關(guān)頻率為1.0 kHz,有延時(shí)補(bǔ)償MPDTC為1.3 kHz,而有延時(shí)補(bǔ)償LSFMPDTC則為900 Hz.

圖5 三種控制方法的定子磁鏈軌跡和幅值Fig.5 Stator flux locus and amplitude of the three control methods
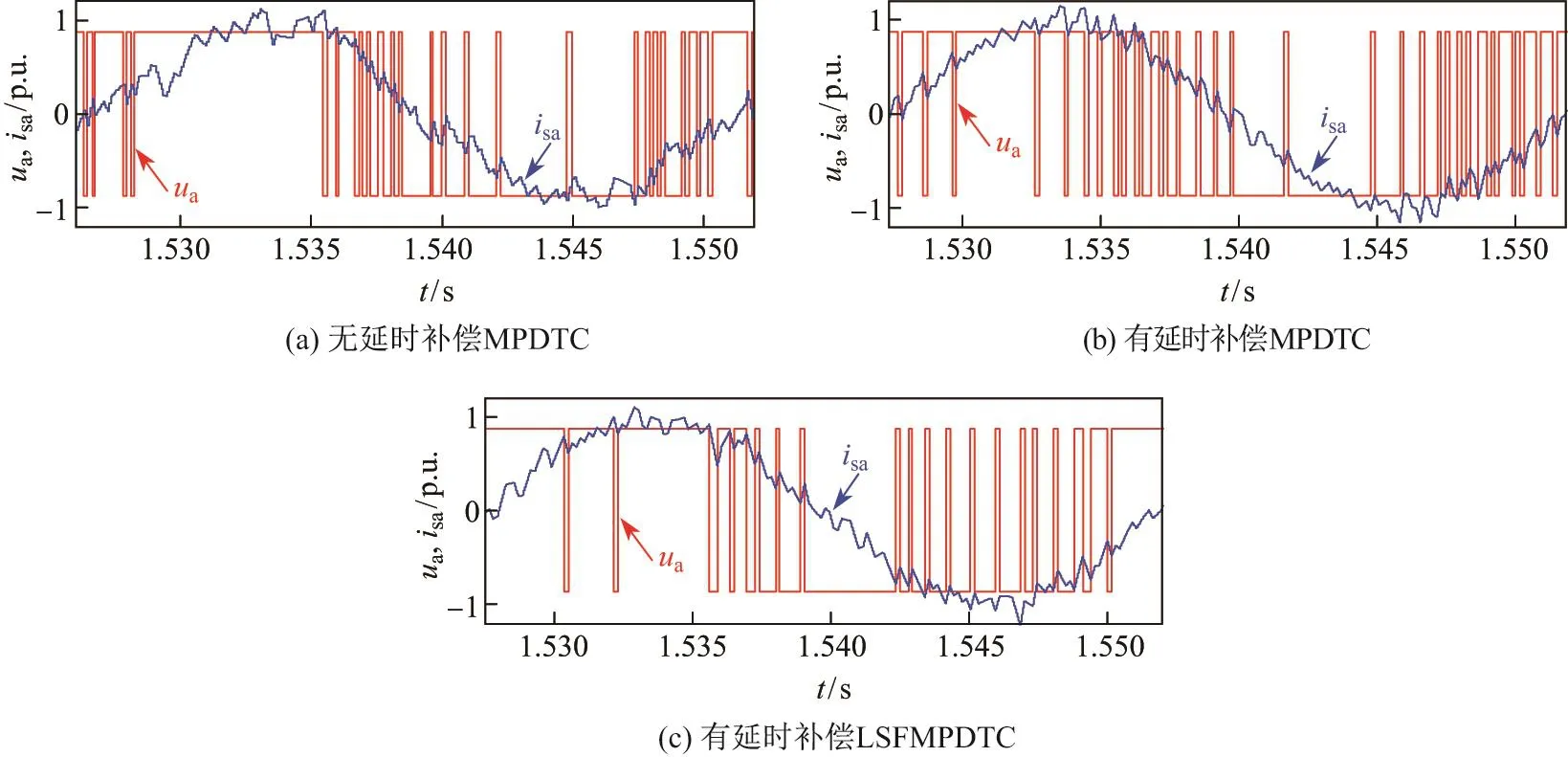
圖6電機(jī)電流isa和逆變器電壓uaFig.6 Current isaand inverter voltage uaof the machine
圖7 為電機(jī)帶額定負(fù)載運(yùn)行在600 r/min時(shí),3種不同開關(guān)頻率權(quán)重因子kf作用下MPDTC的電流isa和逆變器電壓uab.從圖中可以清楚地看出,隨著kf的增加,逆變器的開關(guān)頻率在逐漸減小,與此同時(shí),kf的增加會(huì)使得電機(jī)電流的紋波增大.圖8進(jìn)一步給出了不同權(quán)重因子kf對(duì)逆變器開關(guān)頻率和電機(jī)電流畸變率的影響.在實(shí)際控制中,需要對(duì)逆變器的開關(guān)頻率和電流畸變率進(jìn)行折中考慮.
5 實(shí)驗(yàn)結(jié)果

圖7 不同權(quán)重因子kf作用下的電流和逆變器電壓Fig.7 Current and inverter voltage under different weighting factor kf
對(duì)本工作給出的控制方法進(jìn)行實(shí)驗(yàn)驗(yàn)證,控制器采用TMS320F2812,系統(tǒng)采樣控制頻率設(shè)定為6 kHz,直流母線電壓為540 V,電機(jī)參數(shù)與仿真采用的電機(jī)參數(shù)相同(見表1),實(shí)驗(yàn)中權(quán)重因子為kψ=3,kT=1,kf=0.14.
圖9為電機(jī)運(yùn)行在900 r/min時(shí),突加和突減80%負(fù)載情況下,無延時(shí)補(bǔ)償MPDTC、有延時(shí)補(bǔ)償MPDTC和有延時(shí)補(bǔ)償LSFMPDTC的定子磁鏈幅值|ψs|、轉(zhuǎn)矩Te、轉(zhuǎn)速n和電流isa.由圖可以看出,有延時(shí)補(bǔ)償MPDTC與LSFMPDTC的轉(zhuǎn)矩脈動(dòng)明顯小于無延時(shí)補(bǔ)償MPDTC的轉(zhuǎn)矩脈動(dòng).3種控制方法的定子磁鏈幅值|ψs|在負(fù)載擾動(dòng)時(shí)有微小的下降,而轉(zhuǎn)速基本沒有變化.
圖10是無延時(shí)補(bǔ)償MPDTC和有延時(shí)補(bǔ)償MPDTC方法在電機(jī)帶80%額定負(fù)載運(yùn)行于900 r/min時(shí)的性能對(duì)比.左半部分為無延時(shí)補(bǔ)償MPDTC的結(jié)果,右半部分則為有延時(shí)補(bǔ)償MPDTC的結(jié)果.從圖中可以發(fā)現(xiàn),有延時(shí)補(bǔ)償MPDTC的電流和轉(zhuǎn)矩紋波較小,明顯改善了電機(jī)運(yùn)行性能.
圖11(a)為電機(jī)運(yùn)行在300 r/min時(shí),突加和突減50%額定負(fù)載情況下,有延時(shí)補(bǔ)償LSFMPDTC的實(shí)驗(yàn)結(jié)果;圖11(b)為穩(wěn)態(tài)運(yùn)行時(shí)的實(shí)驗(yàn)結(jié)果.由圖可以看出,在突加和突減負(fù)載時(shí),定子磁鏈幅值和轉(zhuǎn)速幾乎都沒有變化.在穩(wěn)態(tài)運(yùn)行時(shí),轉(zhuǎn)矩和電流的性能也都比較良好.
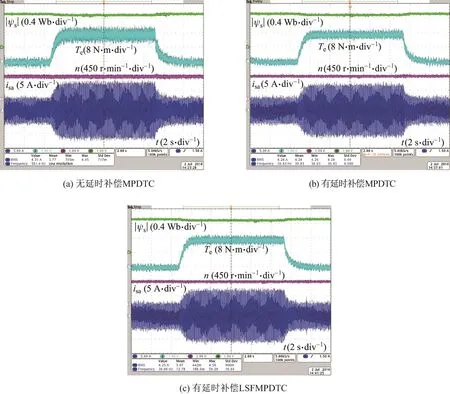
圖9 突加與突減負(fù)載時(shí)3種方法實(shí)驗(yàn)結(jié)果Fig.9 Experimental results of three methods with a step load disturbance
當(dāng)電機(jī)運(yùn)行在900 r/min時(shí),無延時(shí)補(bǔ)償MPDTC、有延時(shí)補(bǔ)償MPDTC和有延時(shí)補(bǔ)償LSFMPDTC所對(duì)應(yīng)的電流isa和逆變器電壓ua如圖12所示.可以明顯發(fā)現(xiàn),有延時(shí)補(bǔ)償MPDTC的開關(guān)頻率要比無延時(shí)補(bǔ)償MPDTC和有延時(shí)補(bǔ)償LSFMPDTC的開關(guān)頻率高.無延時(shí)補(bǔ)償MPDTC的平均開關(guān)頻率為1.1 kHz,而有延時(shí)補(bǔ)償MPDTC和LSFMPDTC的平均開關(guān)頻率則分別為1.8和1.0 kHz.
6 結(jié)束語
本工作提出的改進(jìn)的模型預(yù)測(cè)直接轉(zhuǎn)矩控制方法,通過優(yōu)化矢量選擇器得到需要進(jìn)行價(jià)值函數(shù)優(yōu)化控制的3個(gè)電壓矢量,可有效降低模型預(yù)測(cè)直接轉(zhuǎn)矩控制的優(yōu)化計(jì)算量.對(duì)于控制延時(shí)對(duì)系統(tǒng)性能的影響,延時(shí)補(bǔ)償控制能夠顯著減小由控制延時(shí)引起的電流紋波和轉(zhuǎn)矩脈動(dòng).通過在MPDTC的價(jià)值函數(shù)中加入開關(guān)切換次數(shù)的約束,增大開關(guān)頻率的權(quán)重因子可降低逆變器的開關(guān)頻率,但同時(shí)會(huì)使得電流畸變率有所增加.仿真和實(shí)驗(yàn)結(jié)果表明,由全階磁鏈觀測(cè)器得到的磁鏈能夠準(zhǔn)確地跟蹤其給定值,改進(jìn)的MPDTC具有良好的動(dòng)、靜態(tài)性能,并且可以有效降低逆變器的開關(guān)頻率.

圖10 有/無延時(shí)補(bǔ)償?shù)腗PDTC實(shí)驗(yàn)結(jié)果對(duì)比Fig.10 Experimental results comparison between the MPDTC without delay compensation and the MPDTC with delay compensation

圖11 有延時(shí)補(bǔ)償LSFMPDTC的實(shí)驗(yàn)結(jié)果Fig.11 Experimental results of the LSFMPDTC with delay compensation

圖12 逆變器電壓ua和電流isa的實(shí)驗(yàn)結(jié)果Fig.12 Experimental results of the inverter voltage uaand the current isa
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
