傅里葉光譜儀光程掃描的魯棒H∞控制設計
2019-01-07 06:29:12粘偉劉兆軍林喆
航天返回與遙感 2018年6期
粘偉 劉兆軍 林喆
?
傅里葉光譜儀光程掃描的魯棒H∞控制設計
粘偉1,3劉兆軍2林喆1,3
(1 北京空間機電研究所,北京 100094)(2 北京空間飛行器總體設計部,北京 100094)(3 先進光學遙感技術北京市重點實驗室,北京 100094)
為滿足星載時間調制型傅里葉光譜儀光程掃描速度穩(wěn)定性要求,針對星載光譜儀精密掃描跟蹤系統(tǒng)的特點,提出一種魯棒H無窮(H∞)控制器設計方案。文章首先分析建立了光程掃描系統(tǒng)的數(shù)學模型;在此基礎上,為達到控制性能要求和魯棒性要求,采用H∞混合靈敏度的設計方法,闡述了魯棒H∞控制器設計中加權函數(shù)的選擇依據(jù)和確定過程,利用Matlab魯棒控制工具箱得到H∞最優(yōu)控制器。考慮衛(wèi)星平臺振動的影響,建立干擾源模型,對外界干擾的影響進行了仿真驗證。仿真結果表明,所設計的魯棒H∞最優(yōu)控制器具有良好的掃描跟蹤特性,對外界干擾具有良好的魯棒性,達到了星載光譜儀對高信噪比、高光譜分辨率的光譜探測性能要求。
H無窮控制 魯棒性光程掃描 干擾模型 光譜探測 航天遙感
0 引言
用于分析大氣化學成分變化的星載傅里葉變換光譜儀,它通過對被測光束進行時間或空間調制獲取干涉圖信號,并對干涉圖信號反演獲取被測光譜信息[1],因此必須具有高信噪比、高光譜分辨率才能完成對探測光譜的準確反演。
在時間調制型傅里葉光譜儀中,系統(tǒng)需要控制反射角鏡往復精密擺動,完成干涉光程差的均勻掃描調制[2]。由于星載儀器受微振動等外界不確定因素干擾的影響,對掃描控制魯棒性也有較高要求。相關文獻分析了動鏡傾斜誤差及微振動對星載傅里葉光譜儀的影響[3],給出了光譜儀能夠承受微振動的臨界值[4-5]。同時為保證等光程差掃描采樣,相關文獻提出了基于ISE的控制器參數(shù)優(yōu)化方法,實現(xiàn)了高精度的干涉光程掃描[6];分析了光譜探測性能對光程掃描控制性能要求間的關系,給出了一種基于極點匹配的控制器設計方法。文獻[7]是借助于狀態(tài)反饋設計結果,同時采用易于工程應用的前項和前饋環(huán)節(jié)加以有效實現(xiàn),簡化了控制器的設計與實現(xiàn)難度,達到速度穩(wěn)定度要求。但相應的控制系統(tǒng)設計并未考慮魯棒性要求。
本文針對某星載傅里葉變換光譜儀,分析建立了撓性支撐的光程掃描系統(tǒng)狀態(tài)空間模型。根據(jù)給出的控制性能要求,基于魯棒H∞控制理論,采用H∞混合靈敏度設計方法進行控制器設計,詳細地給出了加權函數(shù)的選擇依據(jù)和確定過程,最終通過魯棒控制工具箱得到H∞最優(yōu)控制器。考慮實際工作過程中衛(wèi)星平臺振動的影響,建立了干擾源模型,分析了系統(tǒng)對外界干擾的魯棒性,通過仿真驗證了本文設計方法具有良好的位置跟蹤性能且對外界擾動有較強的魯棒性。
1 光程掃描系統(tǒng)模型
本星載傅里葉變換光譜儀系統(tǒng)采用帶撓性樞軸的音圈電機作為掃描的執(zhí)行器件。電機與擺臂之間采用撓性樞軸連接,可以有效克服軸承連接帶來的摩擦力矩的影響,但由于撓性樞軸的引入使系統(tǒng)為變負載運動,因此增加了控制系統(tǒng)研制難度。光譜儀應用擺臂上對稱固定的角鏡來完成光程差調制,加上端鏡作用,使得整個光路的最大光程與機械行程之間形成了8∶1的關系。這種折疊式光路大大減少了動鏡移動距離,滿足對星載儀器體積的要求,可在較小空間內實現(xiàn)大的光程差掃描[8]。為達到掃描精度要求,采用共光路的激光計量系統(tǒng)提供采樣脈沖和位置反饋脈沖[9]。
光譜儀光路圖如圖1(a)所示。如圖1(b),位置為擺臂起始運動位置,光線垂直擺臂,對應干涉儀零光程差。和位置擺臂運動過程中將到達位置。假設擺臂逆時針轉動角度到達位置,為時間變量的函數(shù),則光程差(Optical Pass Difference,OPD),即線段OM為:

式中b為擺臂長度。由光譜探測基礎理論可知,光譜分辨率v與光程差OPD之間滿足關系:

一般來說,要對大氣層中的主要氣體組分進行有效識別,儀器的光譜分辨率要達到0.02cm–1水平[10]。因此,由式(2)可得需要的光程差為25cm。當達到最大光程差時,由式(1)可以計算得到最大擺角約為±13.38°。因此,盡管干涉儀的光學結構采用了折疊設計方案,擺臂機構仍然要有較大擺角,并且擺臂的擺動角度與干涉儀的光程差速度是非線性的關系,這也增加了擺臂掃描控制系統(tǒng)研制的難度。
光程掃描過程中,電機的電壓方程和運動方程如下:
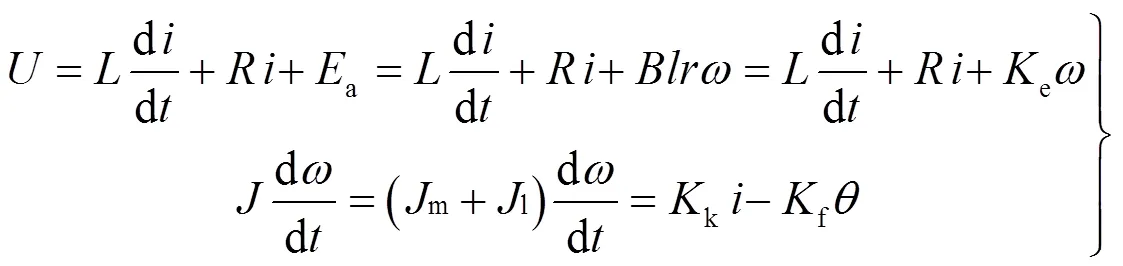

圖2 系統(tǒng)狀態(tài)空間圖

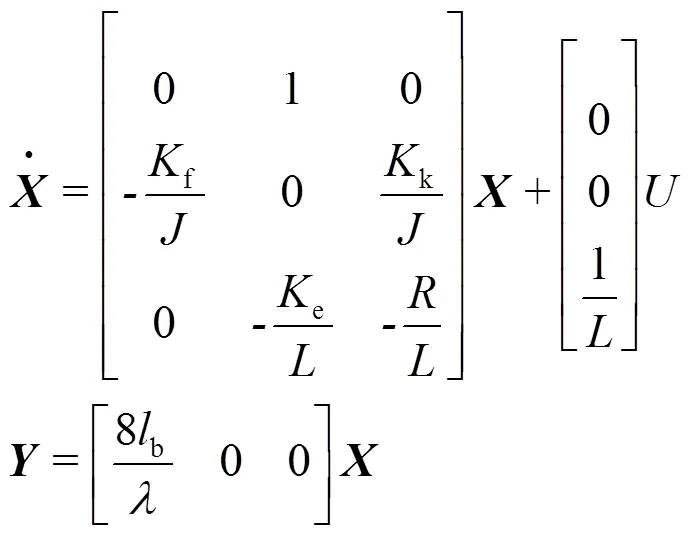
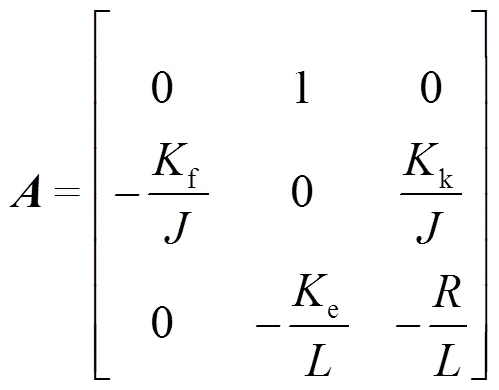
可得到掃描系統(tǒng)的系統(tǒng)矩陣,控制矩陣,輸出矩陣和直接傳遞矩陣分別為:

對上述傳遞函數(shù),通常選擇經典控制論進行控制器設計,如PID控制、極點匹配控制。但以上控制方法均是在未考慮衛(wèi)星平臺振動帶來的不確定性因素影響下進行系統(tǒng)的運動控制,即:使控制性能滿足要求,魯棒性卻難以達到要求。為此,本文采用魯棒H∞控制器進行控制系統(tǒng)設計,以期達到要求。
2 魯棒H∞控制器設計
2.1 加權的控制結構
針對外部干擾和模型的不確定性,H∞控制器的設計可以歸結為混合靈敏度問題[13],即:尋找真實有理函數(shù)控制器K使閉環(huán)系統(tǒng)穩(wěn)定,且滿足范數(shù)要求。由于H∞控制器的階次等于被控對象和權函數(shù)階次之和,所以要盡可能選階次較低的加權函數(shù)[14]。
將干涉儀干擾力矩從被控對象中移出,加載到系統(tǒng)輸出端,轉換為對編碼個數(shù)影響的不確定性,得到如下控制系統(tǒng)結構圖。圖4中各參量定義與圖3相同。
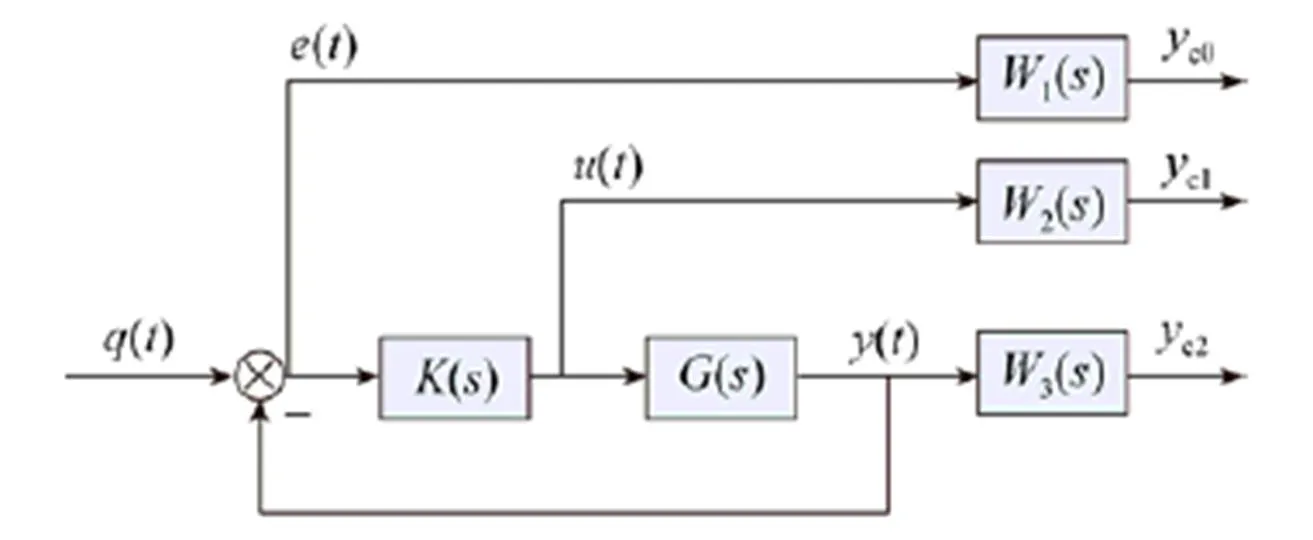
圖3 一般加權靈敏度函數(shù)

圖4 控制系統(tǒng)結構
2.2 加權函數(shù)的選擇方法
為了選擇合適的加權函數(shù),首先對掃描指令曲線作傅里葉變換,得到被跟蹤信號的頻譜主要形狀及其分布。根據(jù)跟蹤信號的頻譜特性,考慮衛(wèi)星平臺振動的影響,給出滿足條件的加權函數(shù)。
圖5給出了規(guī)劃曲線頻譜圖,可以看到,規(guī)劃曲線頻譜中會出現(xiàn)多個諧波分量。
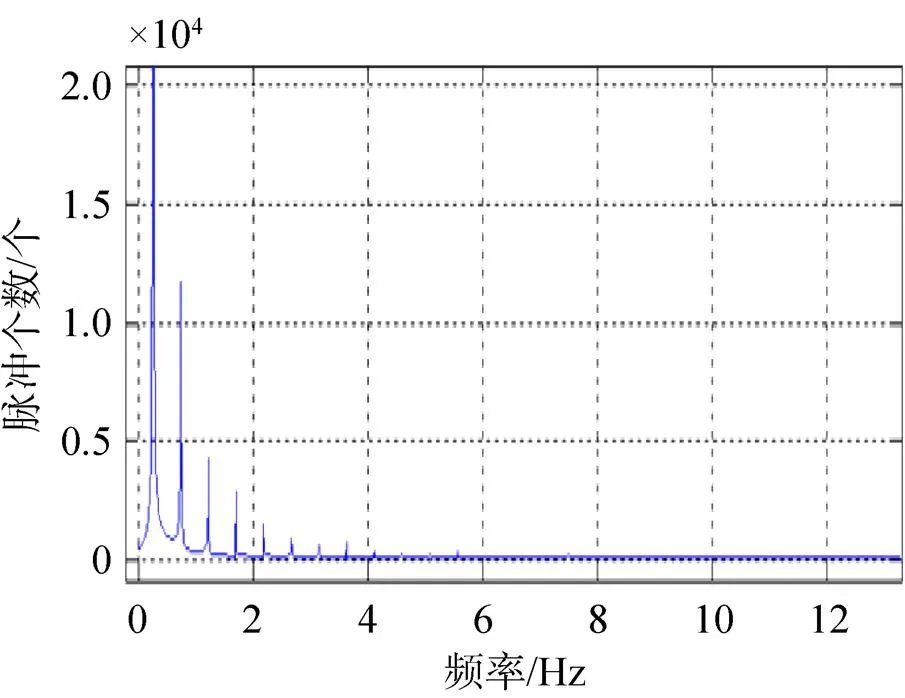
圖5 規(guī)劃曲線頻譜圖
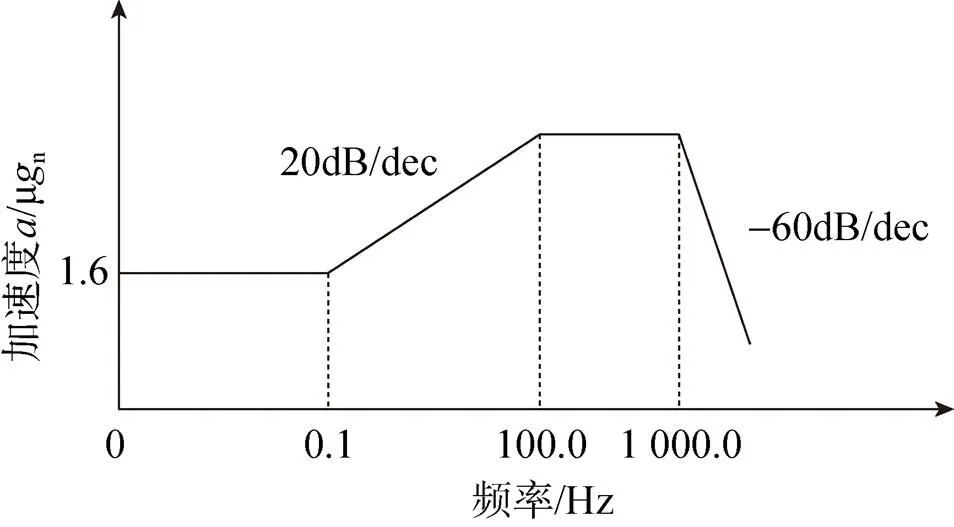
圖6 振動加速度幅頻特性
由此近似得到振動加速度,

通過振動加速度得到干擾力矩,將干擾力矩按控制系統(tǒng)結構圖所示變換為角度值,單獨作用于系統(tǒng)輸出。考慮擺臂往復運動對光程的8倍放大作用,最終將角度變化轉變?yōu)榧す庥嬃棵}沖編碼Mq的變化。即


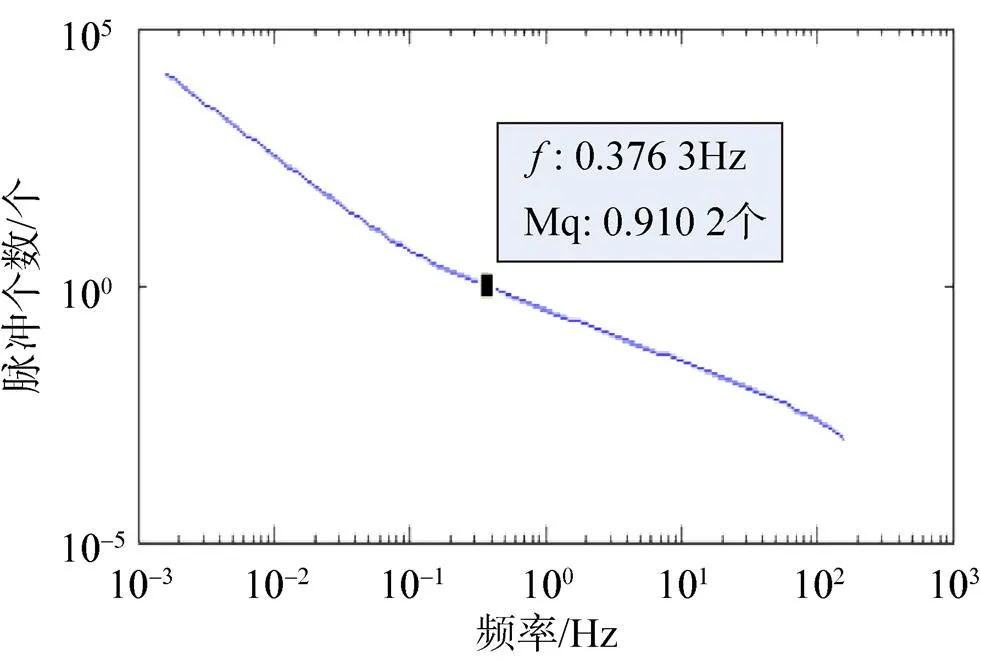
圖7 振動頻率對編碼影響
根據(jù)上述分析,考慮以下幾點[15]:

綜合上述分析,各加權函數(shù)選定如下:
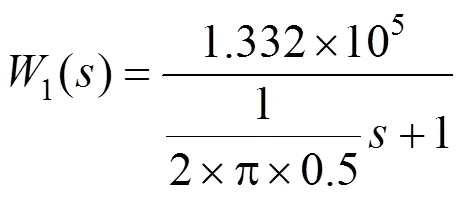
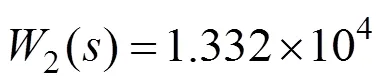

根據(jù)給定的加權函數(shù),利用魯棒控制工具箱,由圖8得到H∞最優(yōu)控制器。
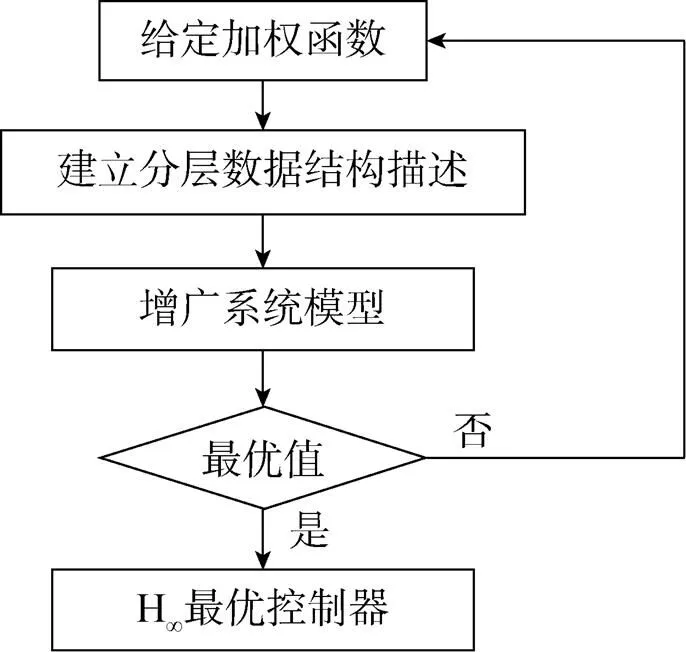
圖8 H∞控制器設計流程
經反復迭代計算,提取控制器系統(tǒng)狀態(tài)方程模型,得到的控制器零極點方程為:

根據(jù)上述H∞控制器,對擺臂運動控制系統(tǒng)的速度穩(wěn)定度仿真分析,對勻速段和調頭段放大處理,得到結果如圖9所示。通過數(shù)據(jù)分析可知,速度穩(wěn)定度嚴格滿足控制指標要求,且換向沖擊小,調頭時間足夠小。
3 干擾源的建立與魯棒性仿真
如圖6所示,根據(jù)衛(wèi)星平臺振動加速度幅頻特性,得到式(7),進而根據(jù)干擾力矩與振動加速度的關系得到干擾力矩的頻譜特性。以高斯白噪聲作為輸入[16],通過振動加速度傳遞函數(shù)構造干擾源模型。將10s內的輸出數(shù)據(jù)保存,通過Matlab仿真分析,得到干擾源頻譜特性如圖10所示。可以看到,干擾源的頻譜特性符合衛(wèi)星平臺振動加速度幅頻特性。可以將此作為對干涉儀運行過程中外界的不確定性干擾,從而驗證控制器的魯棒穩(wěn)定性[17-18]。
在Simulink仿真工具箱中,將外界干擾加入基于H∞的控制方法中,觀察位置跟蹤曲線與速度曲線的變化,并將采樣速度值以向量的形式導出,方便后續(xù)數(shù)據(jù)處理。根據(jù)所得數(shù)據(jù),在Matlab軟件中仿真得到存在外界干擾的情況下的速度曲線。截取勻速運動段分析比較可以得到,基于魯棒H∞的控制方法能滿足速度穩(wěn)定度大于99%的要求,且具有良好的魯棒性。圖11給出的是本系統(tǒng)兩種控制方法得到的速度曲線放大圖,通過比較可以很清楚的看到H∞控制器具有更好的魯棒性。
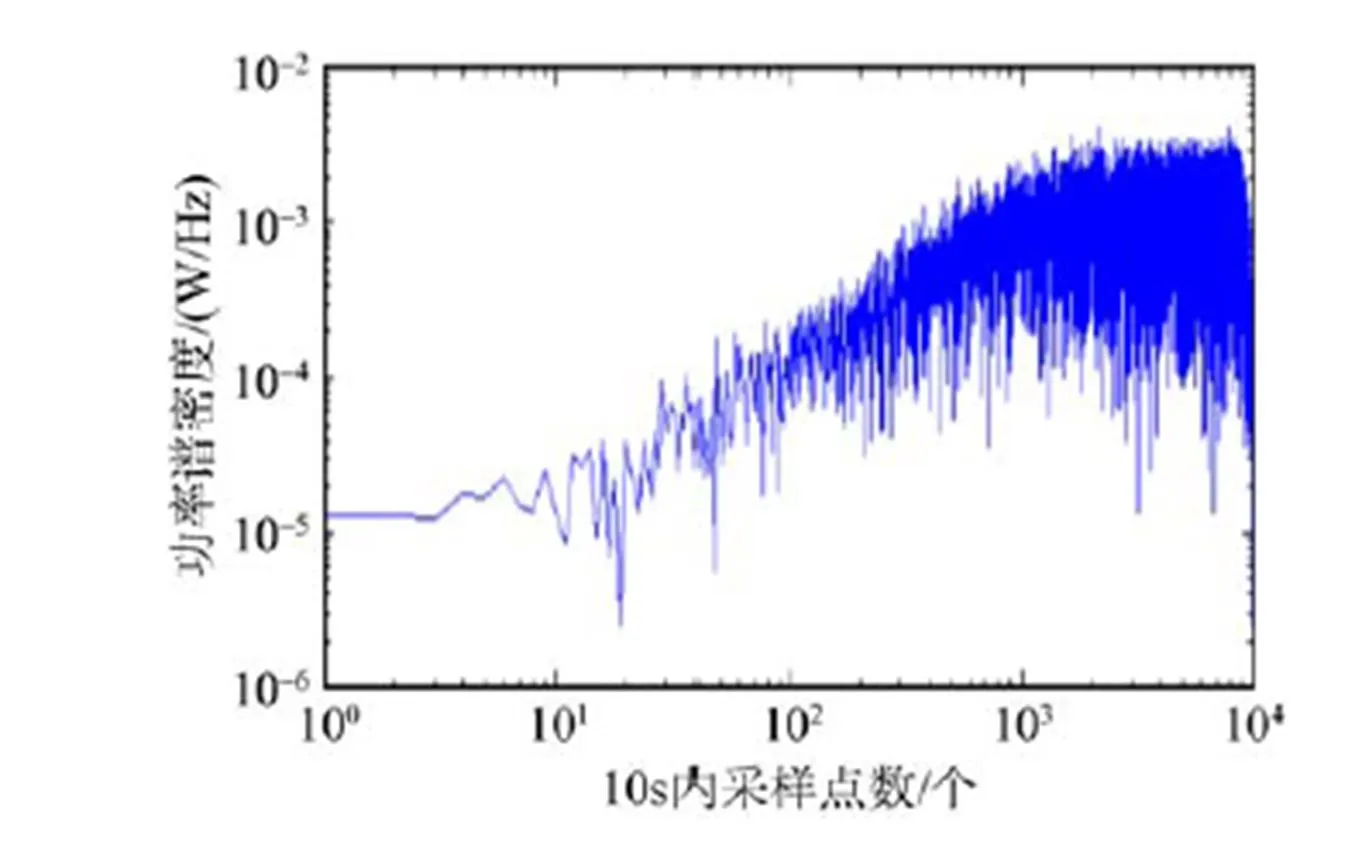
圖10 干擾源功率譜密度

圖11 速度曲線比較
4 結束語
高分辨率光譜探測對星載干涉儀的光程掃描系統(tǒng)及其魯棒性有極其嚴苛的要求,光程掃描速度波動穩(wěn)定性直接決定了干涉圖到光譜圖的等效轉換。本文設計了魯棒H∞控制器,考慮了儀器工作過程中受衛(wèi)星平臺振動等不確定性影響,建立了干擾源模型,并進一步分析了系統(tǒng)魯棒性,仿真結果表明本文的魯棒H∞控制器對位置跟蹤性能及光程差速度穩(wěn)定性均優(yōu)于極點匹配PID控制方法,最終確定了該方法在掃描控制中的有效性。該結論對星載干涉儀的光程掃描系統(tǒng)的控制器設計與工程實現(xiàn)具有重要的參考價值。
[1] 張淳民. 干涉成像光譜技術[M]. 北京: 科學出版社, 2010. ZHANG Chunmin. Interference Imaging Spectrometer Technology[M]. Beijing: Science Press, 2010. (in Chinese)
[2] COMOLLI L, SAGGINA B. Analysis of Disturbances in the Planetary Fourier Spectrometer through Numerical Modeling[J]. Planetary and Space Science, 2010, 58: 864-874.
[3] 曾立波, 尹邦勝, 何冰, 等. 傅立葉變換紅外光譜儀動鏡傾斜誤差分析[J]. 光學精密工程, 2006, 14(2): 191-196. ZENG Libo, YIN Bangsheng, HE Bing, et al. Error Analysis of Moving Mirror in Fourier Transform Interferometer[J]. Optics and Precision Engineering, 2006, 14(2): 191-196. (in Chinese)
[4] 范東棟, 白紹竣. 微振動對星載傅里葉變換光譜儀的影響分析[J]. 航天返回與遙感, 2013, 34(4): 59-65. FAN Dongdong, BAI Shaojun. Influence of Micro-vibration on Space-borne Fourier Transform Spectrometer[J]. Spacecraft Recovery & Remote Sensing, 2013, 34(4): 59-65. (in Chinese)
[5] 段鵬飛, 李明, 徐彭梅. 微振動對干涉儀運動機構均勻性的影響分析[J]. 航天返回與遙感, 2013, 34(6): 44-50. DUAN Pengfei, LI Ming, XU Pengmei. Influence on Velocity Uniformity of Interferometer Mechanism of Micro-vibration[J]. Spacecraft Recovery & Remote Sensing, 2013, 34(6): 44-50. (in Chinese)
[6] 粘偉, 劉兆軍, 林喆, 等. 邁爾爾遜干涉儀的擺臂掃描控制[J]. 科學技術與工程, 2012, 12(33): 8859-8865. NIAN Wei, LIU Zhaojun, LIN Zhe, et al. Arm Scanning Control of Michelson Interferometer[J]. Science Technology and Egineering, 2012, 12(33): 8859-8865. (in Chinese)
[7] 粘偉, 劉兆軍, 林喆, 等. 傅里葉光譜儀的光程掃描控制系統(tǒng)設計[J]. 紅外與激光工程, 2013, 42(8): 2085-2091. NIAN Wei, LIU Zhaojun, LIN Zhe, et al. Optical Path Scanning Control System Design of the Fourier Spectrometer[J]. Infrared and Laser Engineering, 2013, 42(8): 2085-2091. (in Chinese)
[8] MARC-ANDRE S, FRANCOIS C, CHRISTOPHE D, et al. ACE-FTS Instrument Detailed Design[J]. SPIE, 2002, 4814: 176-188.
[9] 管恩義, 王平, 范東棟, 等. B3M傅里葉變換紅外光譜儀干涉圖采樣觸發(fā)信號的誤差研究[J]. 光學技術, 2009, 35(s): 74-76. GUAN Enyi, WANG Ping, FAN Dongdong, et al. B3M Infrared Fourier Transform Spectrometer Sampling Pulse Error Research[J]. Optical Technique, 2009, 35(s): 74-76. (in Chinese)
[10] 巫曉麗, 范東棟, 王平. 空間大氣成分探測傅里葉變換紅外光譜儀[J]. 航天返回與遙感, 2007, 28(2): 15-20. WU Xiaoli, FAN Dongdong, WANG Ping. Fourier-transform Infrared Spectrometer for Space Atmospheric Component Detecting[J]. Spacecraft Recovery & Remote Sensing, 2007, 28(2): 15-20. (in Chinese)
[11] 劉豹, 唐萬生, 著. 現(xiàn)代控制理論[M]. 北京: 機械工業(yè)出版社, 2006. LIU Bao, TANG Wansheng. Modern Control Theory[M]. Beijing: Machinery Industry Press, 2006. (in Chinese)
[12] 王廣雄, 李連峰, 王新生. 魯棒設計中參數(shù)不確定性的描述[J]. 電機與控制學報, 2001, 5(1): 5-7. WANG Guangxiong, LI Lianfeng, WANG Xinsheng. The Description of the Parameter Uncertainty for Robust Design[J]. Electric Machines and Control, 2001, 5(1): 5-7. (in Chinese)
[13] 俞立. 魯棒控制-線性矩陣不等式處理方法[M]. 北京: 清華大學出版社, 2002: 41-44. YU Li. Robust Control—LMI Processing Methods[M]. Beijing: Tsinghua University Press, 2002: 41-44. (in Chinese)
[14] 高云霞, 田沛, 李沁. H∞控制理論在主汽溫控制系統(tǒng)中的應用[J]. 電力科學與工程, 2005(3): 25-27. GAO Yunxia, TIAN Pei, LI Qin. Application of H∞Control Theory to Main Stream Temperature Control Systems[J]. Electric Power Science and Engineering, 2005(3): 25-27. (in Chinese)
[15] 劉彥文, 劉勝, 王毅. 船舶舵減搖的控制設計[J]. 電機與控制學報, 2009, 13(1): 133-137. LIU Yanweng, LIU Sheng, WANG Yi. H∞Design for Rudder Roll Stabilization of Ships[J]. Electric Machines and Control, 2009, 13(1): 133-137. (in Chinese)
[16] HAN Q. Robust Stability of Uncertain Delay-differential Systems of Neutral Type[J]. Automatics, 2002, 3(8): 719-723.
[17] 張俊紅, 于鎰隆, 高宏閣. 汽輪機軸系彎振干擾抑止問題魯棒H∞控制[J]. 振動工程學報, 2006, 19(1): 118-123. ZHANG Junhong, YU Yilong, GAO Hongge. Bending Vibration Control of a Turbo-generator Shaft with Disturb Based on Robust Method[J]. Journal of Vibration Engineering, 2006, 19(1): 118-123. (in Chinese)
[18] 李會軍, 陳明軍. 基于LMI的H∞魯棒PID控制器設計[J]. 控制工程, 2007, 14(3): 294-296. LI Huijun, CHEN Mingjun. Design of H∞Robust PID Controller Based on LMI[J]. Control Engineering of China, 2007, 14(3): 294-296. (in Chinese)
Optical Path Scanning Design Based on Robust H∞Control for the Fourier Spectrometer
NIAN Wei1,3LIU Zhaojun2LIN Zhe1,3
(1 Beijing Institute of Space Mechanics & Electricity, Beijing 100094, China)(2 Beijing Institute of Spacecraft System Engineering, Beijing 100094, China)(3 Beijing Key Laboratory of Advanced Optical Remote Sensing Technology, Beijing 100094, China)
To reach the speed stability requirements of the spaceborne time modulated Fourier spectrometer, the design scheme based on H∞robust control is proposed in view of the precise scanning and tracking of the spaceborne spectrometer. Firstly, the mathematical model of the scanning system is analyzed and then established. Secondly, the H∞hybrid sensitivity design method is used to achieve the control performance requirements. In the meantime, the selection criteria of the weighting function are explained and then the H∞optimal controller is obtained using the MATLAB robust control toolbox. Considering the influence of vibration of the satellite platform, the interference source model is established to verify the boundary interference influence. The simulation results show that the designed H∞robust controller has good performance in scanning and tracking as well as good robustness, achieving the requirements of the high signal-to-noise ratio and high spectral resolution in spaceborne spectrometer.
H∞control; robustness; optical path scanning; interference model; spectral detection; space remote sensing
TM301.2;TH744
A
1009-8518(2018)06-0055-09
10.3969/j.issn.1009-8518.2018.06.007
2018-02-23
國家重大科技專項工程
粘偉,男,1987年生,2013年獲中國空間技術研究院飛行器設計專業(yè)碩士學位,工程師。主要研究方向為空間光學遙感器控制技術研究。E-mail:nianwei1@126.com。
(編輯:龐冰)
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(2020年6期)2020-09-10 07:22:44
藝術啟蒙(2018年7期)2018-08-23 09:14:18
數(shù)學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16