基于多前車信息融合的智能網聯車輛跟馳模型
2019-01-06 07:27:07紀藝史昕趙祥模
計算機應用 2019年12期
紀藝 史昕 趙祥模


摘 要:為了進一步提高交通流的穩定性,在經典基于駕駛員記憶的最優速度(OVCM)模型的基礎上,提出了一種基于多前車最優速度與緊鄰加速度(MHOVA)的智能網聯車輛跟馳模型。首先,引入k輛前車的最優速度變化量與緊鄰前車的加速度改進OVCM模型,并分別以參數γ和ω表示其權重;然后,結合改進模型利用線性穩定性分析獲得交通流的臨界穩定條件;最后,利用Matlab對車隊施加擾動后的速度和車頭距等參數進行數值模擬與分析。仿真結果表明:在車隊啟動和停止過程的仿真中,所提模型比OVCM模型使得車隊整體達到穩定狀態的時間更短;在環形道路上車隊施加擾動的仿真中,所提模型相比于全速度差(FVD)模型、OVCM和多前車最優速度(MHOV)模型,在合理加速度敏感系數ω和前車數k約束下的速度和車頭距波動幅度相對較小,尤其當ω為0.3且k為5時車輛速度的向上和向下波動率最小可達0.67%和0.47%,表明改進模型能較好地吸收交通擾動和增強車隊行駛穩定性。
關鍵詞:交通流;跟馳模型;穩定性分析;最優速度;加速度
中圖分類號: TP301.6;U491.2文獻標志碼:A
Car-following model for intelligent connected vehicles based on
multiple headway information fusion
JI Yi, SHI Xin*, ZHAO Xiangmo
(School of Information Engineering, Changan University, Xian Shaanxi 710064, China)
Abstract: In order to further enhance the stability of traffic flow, based on the classical Optimal Velocity Changes with Memory (OVCM) model, a novel car-following model for intelligent connected vehicles based on Multiple Headway Optimal Velocity and Acceleration (MHOVA) was proposed. Firstly, the optimal velocity change of k leading cars was introduced with the weight γ, as well as the acceleration of the nearest leading car was considered with the weight ω. Then, the critical stability conditions of traffic flow were obtained based on the proposed model and by the linear stability analysis. Finally, the numerical simulations and analyses were carried out on the parameters such as velocity and headway of the fleet with disturbance by Matlab. Simulation results show that, in the simulation of the starting and stopping processes of the fleet, the proposed model reduces the time to obtain the stable state of the fleet compared to OVCM does, in the simulation of a disturbance to the fleet on the annular road, if both ω and k are of rationality, the proposed model can perform the less fluctuations in terms of velocity and headway, compared with the Full Velocity Difference (FVD) model, OVCM and the Multiple Headway Optimal Velocity (MHOV) model. Especially when ω is 0.3 and k is 5, the minimum upward and downward fluctuations of vehicle velocity can be 0.67% and 0.47% respectively. Consequently, the proposed model can better absorb traffic disturbance and enhance the driving stability of fleet.
Key words: traffic flow; car-following model; stability analysis; optimal velocity; acceleration
0 引言
車輛跟馳模型是指在車輛編隊行駛狀態下,利用動力學方法描述后車跟隨前車行駛狀態的理論,主要以數學模型表達跟馳過程中各種狀態參數的演變情況,是交通流仿真的基礎理論,對研究通行能力、服務水平、交通流波動具有重要意義。非自由行駛狀態下的車輛跟馳具有制約性、延遲性、傳遞性三個特性。制約性涉及行車速度約束和安全距離約束;延遲性來源于前后車運動狀態改變的非同步;傳遞性體現在前車對后車運行狀態的制約呈現依次后傳的情形[1]。
國內外相關學者根據車輛跟馳的三大特性開展了大量有關跟馳建模的研究工作[2-4],主要體現在:結合刺激反應理論,Chandler等[5]和Newell[6]分別利用前后車速度差和前后車車間距建立了基于刺激反應的跟馳模型。在Newell[6]所提出模型的基礎上,Bando等[7]提出了一種基于前后車車間距的最優速度(Optimal Velocity, OV)模型,該模型具有簡單直觀和便于數值模擬等優點。Helbing等[8]針對OV模型未考慮前后車速度差所產生的加速度不合理問題,提出了一種廣義力(General Force, GF)模型,當跟馳車的速度大于前車時,引入前后車負速度差修正OV模型以避免車輛發生碰撞。Jiang等[9]考慮正負速度差對跟馳車加速度的影響對GF模型進行改進,提出了一種全速度差(Full Velocity Difference, FVD)模型,該模型能更全面地描述交通流的跟馳現象。Peng等[10]引入最優速度關于時間的差值項對FVD模型進行改進,提出了一種基于駕駛員記憶的最優速度(OV Changes with Driving Memory, OVCM)模型,仿真結果表明OVCM模型在交通流穩定性方面優于FVD模型。
綜上所述,由于跟馳模型存在的制約性、延時性和傳遞性,跟馳車在非自由行駛狀態下的安全距離、速度、加速度等信息易受到多前車狀態的影響。以OVCM模型為例,若前車速度小于跟馳車速度(即兩者速度差Δvn(t)<0),車頭距Δxn(t)和最優速度V(Δxn(t))將減小,相應地跟馳車的加速度呈現減小趨勢;若前車處于加速階段,在不考慮緊鄰前車加速度信息的條件下,需要間接解析前車與跟馳車的速度信息并歷經一定的時間延遲才能捕獲Δxn(t)的增大趨勢,同時在延遲時間段內跟馳車的加速度仍將繼續減小。在實際駕駛環境中,如果駕駛員發現前車處于加速狀態,跟馳車的加速度不會立即減小,甚至在保證安全車頭距的情況下適當地給予增加。因此,充分的多前車狀態信息有利于跟馳車得到更加準確的加速度決策信息[11]。
隨著車聯網技術的發展,跟馳車在智能網聯環境中利用車載終端可以有效獲取多前車的狀態信息,如車頭距、速度、加速度等[12]。本文考慮融合多前車最優速度信息以及緊鄰前車加速度信息對車輛跟馳模型進行改進,提出了一種基于多前車最優速度與緊鄰加速度的智能網聯車輛跟馳(Multiple Headway Optimal Velocity and Acceleration, MHOVA)模型。為了驗證MHOVA模型的合理性,首先通過線性穩定性分析獲取所提出模型的穩定性臨界條件;然后,根據穩定性臨界條件設定模型的關鍵參數,如緊鄰前車加速度敏感系數等;最后,利用Matlab仿真平臺對車隊施加擾動后的速度和車頭距等參數的變化規律進行數值模擬,并與FVD、OVCM等模型進行對比分析。
1 MHOVA模型的建立
在車輛行駛過程中,駕駛員根據當前周圍車況及道路標識等相關信息做出相應的駕駛決策,這一過程形成了駕駛員的記憶效應[13]。在傳統車輛跟馳模型中駕駛員的記憶效應未列入考慮范疇。在實際駕駛環境中,駕駛員對相關交通狀態信息存有記憶并會根據所記憶信息調整駕駛行為。文獻[10]引入駕駛員記憶效應對FVD模型進行改進,提出了OVCM模型。OVCM模型的車輛運動方程表達式如下:
dvn(t)dt=a[[V(Δxn(t))-vn(t)]+λΔvn(t)+
γ[V(Δxn(t))-V(Δxn(t-τm))](1)
其中:a表示對最優速度的敏感系數;V(Δxn(t))表示跟馳車的最優速度函數;λ表示對前后速度差的敏感系數;τm表示采樣時間步長;V(Δxn(t))-V(Δxn(t-τm))表示最優速度在行車時間作用下的差值(記憶效應);γ表示對記憶效應V(Δxn(t))-V(Δxn(t-τm))的敏感系數,當 τm=0或γ=0時,OVCM模型簡化為FVD模型。由式(1)可知,如果跟馳車在時間點t的最優速度小于(t-τm)的最優速度,或者跟馳車的最優行駛速度在某一時間段內呈現減小態勢,則跟馳車具有減速的傾向,反之跟馳車則具有加速的傾向。
由于多前車速度和緊鄰前車加速度對跟馳車的跟馳行為影響較大,引入多前車速度和緊鄰前車加速度對OVCM模型進行改進,提出的改進模型MHOVA的運動方程如式(2)所示:
vn(t+T)=V(∑ki=1Δxn+i-1,Δxn-1,Δvn,an+1(t))(2)
式(2)的進一步展開形式如式(3)所示:
V(∑ki=1Δxn+i-1,Δxn-1,Δvn,an+1(t))=aV(Δxn(t))+
λTΔvn(t) +ωTan+1(t)+∑ki=1Tγi[V(Δxn+i-1(t))-
V(Δxn+i-1(t-τm))](3)
其中:T為駕駛員和車輛機械傳動等因素產生的延時,表示所期望的速度需要歷經時間T才能到達;ω表示跟馳車對緊鄰前車加速度信息an+1(t)的敏感系數;k(k≥1)表示所考慮的前車數量總數;γi是代表第i個車關于最優速度記憶的敏感系數;[V(Δxn+i-1(t))-V(Δxn+i-1(t-τm))]表示第n+i-1輛車根據前向觀測獲得的最優速度記憶,其余項與OVCM模型含義一致。當k=1且ω=0時,MHOVA模型與OVCM模型等價。V(Δxn(t))采用的具體函數如式(4)所示:
V(Δxn(t))=Vmax2[tanh(Δxn(t)-hc)+tanh(hc)](4)
其中:Vmax為車輛的最大速度;hc表示車輛間的安全距離。
式(3)中的延遲時間T不利于公式解析與模型仿真,且加速度對車輛的控制比速度更為直接。因此,對式(3)進行簡化,具體過程如式(5)~式(11)所示:
vn(t+T)=vn(t)+Tan(t)(5)
將式(5)代入式(2)得到式(6),進一步得到an(t)的表達式如式(7)所示:
vn(t)+Tan(t)=
V(∑ki=1Δxn+i-1,Δxn-1,Δvn,an+1(t))(6)
an(t)=
1T(V(∑ki=1Δxn+i-1,Δxn-1,Δvn,an+1(t))-vn(t))(7)
取a=1/T,將式(2)代入式(7)得到式(8):
dvn(t)dt=a[V(Δxn(t)-vn(t))]+λΔvn(t)+ωan+1(t)+
∑ki=1γi[V(Δxn+i-1(t))-(Δxn+i-1(t-τm))](8)
為了簡化計算,忽略變量Δxn(t-τm)泰勒展開式的非線性項得到簡化后的Δxn(t-τm),如式(9)所示:
Δxn(t-τm)=Δxn(t)-τmdΔvn(t)dt=
Δxn(t)-τmΔvn(t)(9)
同理,簡化后的V(Δxn(t-τm))如式(10)所示:
V(Δxn(t-τm))=
V(Δxn(t))-τmΔvn(t)V′(Δxn(t))(10)
將式(9)和式(10)代入式(8)得到簡化后的運動方程,如式(11)所示:
dvn(t)dt=a[V(Δxn(t))-vn(t)]+λΔvn(t)+
ωan+1(t)+∑ki=1γiτmV′(Δxn+i-1(t))Δvn+i-1(t)(11)
2 線性穩定性分析
若對一個平穩行駛的車隊施加一個微小的擾動,如調整中間某輛車的速度,整個車隊將脫離原本穩定的運行狀態。如果擾動未超出穩定性臨界條件,車隊經歷一定時間后將回歸穩定平穩的運行狀態;反之,擾動的影響會不斷放大,最終使整個車隊處于混亂狀態。因此,有必要對所提出模型的穩定性進行分析與判定。
利用Lyapunov第一方法并結合線性諧波微擾法[14]分析MHOVA模型的穩定性臨界條件。假設車隊處于穩定時車頭距為h,以最優速度V(h)行駛,每輛車的位置為x(0)n(t)=hn+V(h)t。如果第n輛車在行駛過程中施加擾動項yn(t)=e(ikn+zt),則第n輛車的位置更新后的表達式如式(12)所示,進一步得到yn(t)的表達式如式(13)所示:
xn(t)=x(0)n(t)+yn(t)(12)
yn(t)=xn(t)-x(0)n(t)(13)
對式(13)求一階導數得到式(14):
dyn(t)dt=dxn(t)dt-V(h)(14)
進一步對式(14)求一階導數得到式(15):
d2yn(t)dt2=dvn(t)dt(15)
令Δyn(t)=yn+1(t)-yn(t) ,則車頭距定義如式(16)所示:
Δxn(t)=h+Δyn(t)(16)
將式(15)和式(16)代入式(11),得到與擾動相關的微分方程如式(17)所示:
d2yn(t)dt2= a[V′(h)Δyn(t)-dyn(t)dt]+
∑ki=1γiτmV′(Δxn+i-1(t))dΔyn+i-1(t)dt+
λdΔyn(t)dt+ωd2yn+1(t)dt2(17)
其中V′(h) = dV(Δ xn)dΔ xn|Δxn=h。
由于yn(t)=e(ikn+zt),令e(ikn+zt)=eM,將式(17)中yn(t)按傅里葉級數展開得到式(18):
z2eM= a[V′(h)(eik-1)eM-zeM]+λz(eik-1)eM+
ωe(M+1)+∑ki=1γiτmV′(h)z(eiki-eik(i-1))eM(18)
將式(18)的參數z按z= z1(ik)+z2(ik)2展開,得到z1和z2的表達式,如式(19)所示:
z1=V′(h)
z2=12V′(h)+1a[λz1-(1-ω)z12+
∑ki=1γiτme(i-1)z1](19)
若z2<0,則車隊運行狀態不穩定;反之,車隊運行狀態穩定[15]。根據式(19)中z2的表達式可進一步求出敏感系數a的取值范圍,如式(20)所示:
a>[-λV′(h)+(1-ω)V′(h)2-
∑ki=1γiτme(1-i)V′(h)]/V′(h)(20)
考慮5輛前車的最優速度且敏感系數γi按照由近到遠依次定義為0.1、0.08、0.06、0.04和0.02,則車頭距h與敏感系數a的相位圖如圖1所示,圖中虛線表示穩定性臨界曲線,曲線以上部分為穩定區,反之為非穩定區。由圖1可得,ω>0時跟馳模型的穩定區大于ω=0時跟馳模型的穩定區,且隨著ω的增加,其穩定區逐漸擴大,這表明加入緊鄰前車加速度項后能在a的較大取值范圍內保持車輛穩定行駛,有利于增強交通流的穩定性。本文提出的MHOVA模型考慮了緊鄰前車加速度項(即ω>0),而OVCM模型的ω等于0,從線性穩定性角度而言,MHOVA模型比OVCM模型具有更好的穩定性。
3 數值模擬與分析
3.1 車輛啟動與停止過程仿真對比
3.1.1 啟動過程數值仿真
本節仿真MHOVA模型在交通信號燈由紅燈轉向綠燈后車隊車輛啟動的情況。
車輛啟動過程中場景模擬[16]如下:在t<0時,交通信號燈為紅燈,車隊由10輛車組成,每輛車的位置為xn(0)=(n-1)Δxn,其中n=1, 2, …, 10,車頭距Δxn=7.4m,車輛均處于靜止狀態,即vn(0)=0,n=1, 2, …, 10,車輛的最優速度均為0。t=0時刻,交通信號燈由紅色轉為綠色,頭車開始啟動,隨后各輛車依次開始啟動。最優速度的敏感系數a取值為0.41s-1,前后車速度差敏感系數λ取值為0.6s-1,駕駛員記憶項敏感系數γi取值均為0.1s-1,跟馳車對緊鄰前車加速度信息的敏感系數ω取值為0.3,所考慮的前車數k取值為2。選用文獻[8]使用實測交通數據標定后的最優速度函數如式(21)所示:
V(Δxn(t))=V1+
V2 tanh[C1(Δxn(t)-lc)-C2](21)
其中: V1=6.75m/s,V2=7.91m/s,C1=0.13m-1,C2=1.57,lc=5m。
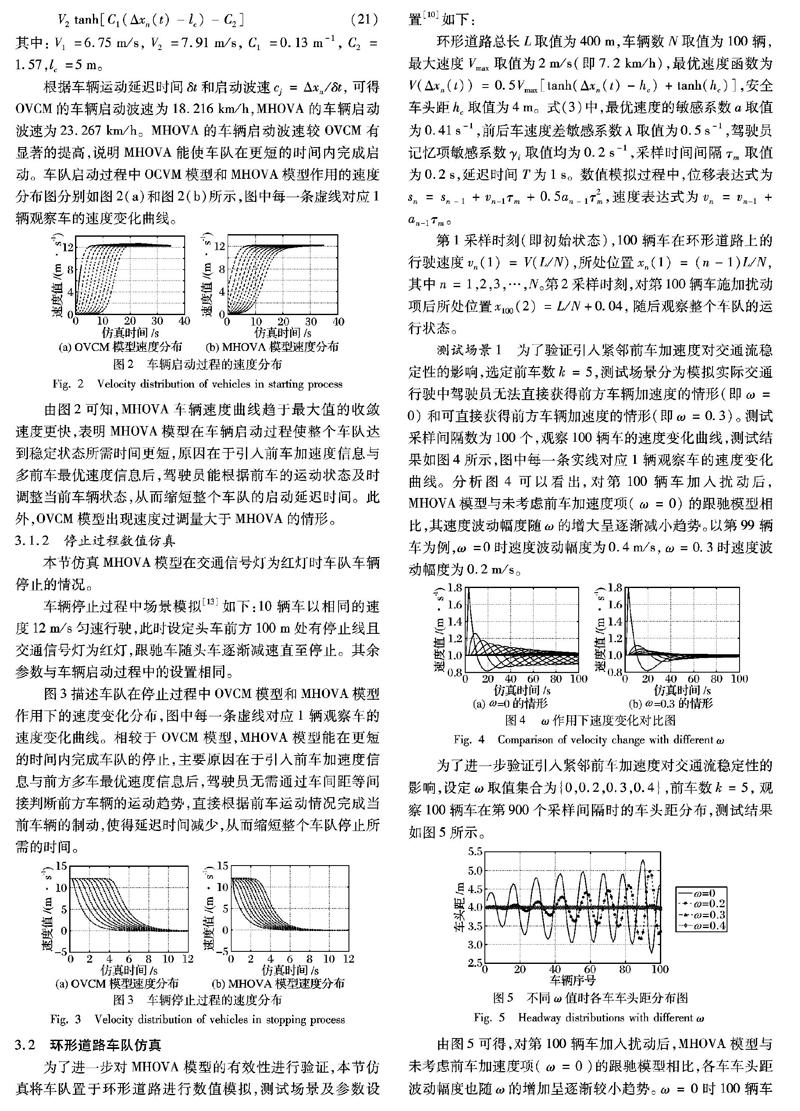
根據車輛運動延遲時間δt和啟動波速cj=Δxn/δt,可得OVCM的車輛啟動波速為18.216km/h,MHOVA的車輛啟動波速為23.267km/h。MHOVA的車輛啟動波速較OVCM有顯著的提高,說明MHOVA能使車隊在更短的時間內完成啟動。車隊啟動過程中OCVM模型和MHOVA模型作用的速度分布圖分別如圖2(a)和圖2(b)所示,圖中每一條虛線對應1輛觀察車的速度變化曲線。
由圖2可知,MHOVA車輛速度曲線趨于最大值的收斂速度更快,表明MHOVA模型在車輛啟動過程使整個車隊達到穩定狀態所需時間更短,原因在于引入前車加速度信息與多前車最優速度信息后,駕駛員能根據前車的運動狀態及時調整當前車輛狀態,從而縮短整個車隊的啟動延遲時間。此外,OVCM模型出現速度過調量大于MHOVA的情形。
3.1.2 停止過程數值仿真
本節仿真MHOVA模型在交通信號燈為紅燈時車隊車輛停止的情況。
車輛停止過程中場景模擬[13]如下:10輛車以相同的速度12m/s勻速行駛,此時設定頭車前方100m處有停止線且交通信號燈為紅燈,跟馳車隨頭車逐漸減速直至停止。其余參數與車輛啟動過程中的設置相同。
圖3描述車隊在停止過程中OVCM模型和MHOVA模型作用下的速度變化分布,圖中每一條虛線對應1輛觀察車的速度變化曲線。相較于OVCM模型,MHOVA模型能在更短的時間內完成車隊的停止,主要原因在于引入前車加速度信息與前方多車最優速度信息后,駕駛員無需通過車間距等間接判斷前方車輛的運動趨勢,直接根據前車運動情況完成當前車輛的制動,使得延遲時間減少,從而縮短整個車隊停止所需的時間。
3.2 環形道路車隊仿真
為了進一步對MHOVA模型的有效性進行驗證,本節仿真將車隊置于環形道路進行數值模擬,測試場景及參數設置[10]如下:
環形道路總長L取值為400m,車輛數N取值為100輛,最大速度Vmax取值為2m/s(即7.2km/h),最優速度函數為V(Δxn(t))=0.5Vmax[tanh(Δxn(t)-hc)+tanh(hc)],安全車頭距hc取值為4m。式(3)中,最優速度的敏感系數a取值為0.41s-1,前后車速度差敏感系數λ取值為0.5s-1,駕駛員記憶項敏感系數γi取值均為0.2s-1,采樣時間間隔τm取值為0.2s,延遲時間T為1s。數值模擬過程中,位移表達式為sn = sn - 1 + vn-1τm + 0.5an - 1τ2m,速度表達式為vn=vn-1+an-1τm。
第1采樣時刻(即初始狀態),100輛車在環形道路上的行駛速度vn(1)=V(L/N),所處位置xn(1)=(n-1)L/N,其中n=1,2,3,…,N。第2采樣時刻,對第100輛車施加擾動項后所處位置x100(2)=L/N+0.04,隨后觀察整個車隊的運行狀態。
測試場景1 為了驗證引入緊鄰前車加速度對交通流穩定性的影響,選定前車數k=5,測試場景分為模擬實際交通行駛中駕駛員無法直接獲得前方車輛加速度的情形(即ω=0)和可直接獲得前方車輛加速度的情形(即ω=0.3)。測試采樣間隔數為100個,觀察100輛車的速度變化曲線,測試結果如圖4所示,圖中每一條實線對應1輛觀察車的速度變化曲線。分析圖4可以看出,對第100輛車加入擾動后,MHOVA模型與未考慮前車加速度項(ω=0)的跟馳模型相比,其速度波動幅度隨ω的增大呈逐漸減小趨勢。以第99輛車為例,ω=0時速度波動幅度為0.4m/s,ω=0.3時速度波動幅度為0.2m/s。
為了進一步驗證引入緊鄰前車加速度對交通流穩定性的影響,設定ω取值集合為{0,0.2,0.3,0.4},前車數k=5,觀察100輛車在第900個采樣間隔時的車頭距分布,測試結果如圖5所示。
由圖5可得,對第100輛車加入擾動后,MHOVA模型與未考慮前車加速度項(ω=0)的跟馳模型相比,各車車頭距波動幅度也隨ω的增加呈逐漸較小趨勢。ω=0時100輛車的車頭距擺動方差為0.4329,ω=0.2時100輛車的車頭距擺動方差為0.1128,ω=0.3時100輛車的車頭距擺動方差趨近于0。
從圖4與圖5的測試結果看出,前車加速度項對跟馳車的行駛狀態存在直接約束關系,引入前車加速度項的MHOVA模型有利于穩定車速和車頭距,從而更有效地促進車隊的平穩運行。
測試場景2 為了驗證引入多前車最優速度項對交通流穩定性的影響,設定前車加速度敏感系數ω=0.3,測試場景模擬實際交通行駛中駕駛員分別能夠獲得1輛(k=1)、5輛(k=5)和10輛前車最優速度項的情形(k=10)。采樣間隔數為500個,考慮到跟馳模型的傳遞性和延時性,越鄰近施加擾動車輛的跟馳車產生的速度波動影響越大,且第100~51輛車產生的波動大于第50~1輛車,故分別觀察第98、80、70和60輛車的速度變化,測試結果如圖6所示。由圖6可得,前車數k=5時MHOVA模型的車速波動幅度明顯低于k=1時的情形;前車數k=10時的MHOVA模型其車速波動幅度反而大于前車數k=5時的情形。由此可得,選取適當的前車數k有利于提高車隊的穩定性,與跟馳車距離增大的前車對跟馳車行駛狀態的影響逐漸減弱,考慮較大的前車數k反而不利于促進車隊行駛的穩定性。
測試場景3 為了驗證引入緊鄰前車加速度項與多前車最優速度項對交通流穩定性的影響,模擬實際交通行駛中駕駛員可以得到緊鄰前車加速度信息和5輛前車最優速度信息的情形(即MHOVA模型),根據圖4和圖6的數值模擬結果,ω=0.3和k=5時車隊整體速度波動達到較小值,故設定前車加速度敏感系數ω=0.3,前車數k取值為5。不考慮緊鄰前車加速度的影響,利用5輛前車信息對OVCM模型進行改進可得到多前車最優速度(Multiple Headway Optimal Velocity, MHOV)模型,MHOV模型模擬的實際交通場景為駕駛員可以得到5輛前車最優速度信息的情形。表1~3描述了FVD、OVCM、MHOV和MHOVA四種模型分別在第30、100和500個采樣間隔的車輛速度分布情況。參數Vmax、Vave、Vmin、Rup、Rdn分別表示最大速度、平均速度、最小速度、向上波動率與向下波動率。
分析表1~3可得,MHOVA模型在3個采樣間隔的上波動率Rup和向下波動率Rdn均小于MHOV模型、OVCM模型和FVD模型;車隊加入擾動后隨著時間的累積,MHOVA模型的波動率呈逐漸減小趨勢,第500個采樣間隔時車隊車速達到穩定狀態,向上波動率Rup與向下波動率Rdn分別為0.67%和0.47%;綜上所述,MHOVA模型能較好地吸收擾動且有利于增強車隊行駛的穩定性。
4 結語
在智能網聯環境中,為了建立更加精準的跟馳模型提升交通流的穩定性,考慮融合多前車行駛狀態信息,提出了一種基于多前車最優速度與緊鄰加速度的智能網聯車輛跟馳(MHOVA)模型。根據線性穩定性分析可得,MHOVA模型的穩定區域大于MHOV模型,且隨著加速度敏感系數ω的增加穩定區域不斷擴大。數值模擬結果表明:1)在車隊啟動和停止過程的模擬中,引入緊鄰前車加速度項和多前車最優速度信息有利于減少車隊整體達到穩定狀態的時間;2)確定前車數k時,ω>0時的速度與車頭距波動幅度均小于ω=0時的波動幅度,進一步說明引入加速度項有利于增強車隊行駛的穩定性;3)確定加速度敏感系數ω時,MHOVA模型選取合理的前車數k有利于提高車隊行駛的穩定性;4)選擇合理的加速度敏感系數ω和前車數k時,相比FVD、OVCM和MHOV模型,MHOVA模型的速度波動率隨著采樣時間的增加呈逐漸減小趨勢,表明該模型能夠有效地促進交通流的穩定。鑒于數值模擬場景和模型參數設置的局限性,下一步將利用實際車輛隊列數據對MHOVA模型進行參數辨識與修正,以深入改進和提升MHOVA模型對實際交通現象的模擬能力。
參考文獻 (References)
[1]JIN S, HUANG Z, TAO P, et al. Car-following theory of steady-state traffic flow using time-to-collision [J]. Journal of Zhejiang University-SCIENCE A, 2011, 12(8): 645-654.
[2]魏福祿,劉楊.經典跟馳模型的發展綜述[J].吉林建筑大學學報,2018,35(4):19-23.(WEI F L, LIU Y. Review of the development of classic car-following models [J]. Journal of Jilin Jianzhu University, 2018, 35(4): 19-23.)
[3]袁娜,史昕,趙祥模.基于改進人工魚群算法的車輛軌跡規劃方法[J].計算機應用,2018,38(10):3030-3035,3047.(YUAN N, SHI X, ZHAO X M. Vehicle trajectory planning method based on improved artificial fish swarm algorithm [J]. Journal of Computer Applications, 2018, 38(10): 3030-3035, 3047.)
[4]李力,姜銳,賈斌,等.現代交通流理論與應用:高速公路交通流[M].北京:清華大學出版社,2011:84-96.(LI L, JIANG R, JIA B, et al. Modern Traffic Flow Theory and Application: Highway Traffic Flow [M]. Beijing: Tsinghua University Press, 2011: 84-96.)
[5]CHANDLER R E, HERMAN R, MONTROLL E W. Traffic dynamics: studies in car following [J]. Operations Research, 1958, 6(2): 165-184.
[6]NEWELL G F. Memoirs on highway traffic flow theory in the 1950s [J]. Operations Research, 2002, 50(1): 173-178.
[7]BANDO M, HASEBE K, NAKAYAMA A, et al. Dynamical model of traffic congestion and numerical simulation [J]. Physical Review E, Statistical Physics, Plasmas, Fluids, and Related Interdisciplinary Topics, 1995, 51(2): 1035-1042.
[8]HELBING D, TILCH B. Generalized force model of traffic dynamics [J]. Physical Review E, Statistical Physics, Plasmas, Fluids, and Related Interdisciplinary Topics, 1998, 58(1): 133-138.
[9]JINAG R, WU Q, ZHU Z. Full velocity difference model for a car-following theory [J]. Physical Review E, Statistical, Nonlinear, and Soft Matter Pphysics, 2001, 64(1 Pt 2): Article No. 017101.
[10]PENG G, LU W, HE H, et al. Nonlinear analysis of a new car-following model accounting for the optimal velocity changes with memory [J]. Communications in Nonlinear Science and Numerical Simulation, 2016, 40: 197-205.
