柔性吞咽機械手的結構設計與樣機試驗*
2019-01-02 02:20:58董增雅高國華
機電工程 2018年12期
關鍵詞:變形
董增雅,高 謙,高國華*,王 皓
(1.北京工業大學 機械工程與應用電子技術學院,北京 100124;2.北京生產力促進中心,北京 100088)
0 引 言
目前,我國農業生產領域已經比較廣泛使用機器人[1]。我國果樹種植面積超過1 000萬公頃,年產量超過2億噸[2]。果實采摘是農業生產中最耗時費力的環節。采摘自動化能提高勞動生產率和產品質量,確保適時采收果蔬,解決勞動力不足等問題[3-4]。采摘機器人是智能農業機械化的發展方向之一,具有廣闊的應用前景[5]。
機械手是采摘機器人實現果實采摘的核心部件,由于果皮較為脆弱,抓取過程中容易造成損傷,對機械手具有一定的柔性要求[6]。與傳統剛性機械手相比,柔性機械手具有質量輕、體積小、速度高、負載能力強、能耗小、成本低等優點。
目前,國內外對機械手已開展了大量的研究,但是存在通用性較差、結構復雜、控制困難、柔順適應性差等問題。加拿大制作了自適應機械手指PaCoMe,無需傳感器,控制簡單,但柔順性較差[7];葡萄牙研制了依據繩線驅動的柔性連接手,機構本身容易傾斜[8];哈佛大學研制了氣動型軟體機器人,可以抓取雞蛋但是加工困難[9];美國研制了一種西紅柿采摘機械手,屬于高度欠驅動機構,手指易發生彎曲而導致果實抓取的失敗[10];臥龍崗大學基于3D打印制造了柔性手指,剛度可調,能抓取最大重量為180 g的瓶子[11-12];浙江大學利用欠驅動原理研制了一款結構簡單的末端執行裝置[13];南京理工大學基于剛柔相結合的方案制作了一種軟體驅動三觸手柔性手爪[14-15];浙江工業大學王志恒等人[16-20]設計了ZJUT氣動柔性機械手;楊婕等人[21-22]采用鋁合金研制了欠驅動靈巧機械手;浙江工業大學以氣動柔性關節和扭轉關節為基礎設計了柔性手爪[23]。
通過國內外的研究現狀分析可知,機械手的結構分為2類:一類多是關節型,手指數目一般為3~5個,手指關節的運動副多為轉動副,此類機械手一般是剛性接觸,通過多關節手指完成抓取,但是結構復雜、質量大、柔順性差;另一類為基于新技術、新材料的機械手,該類機械手自適應抓取效果好、驅動簡單,但存在加工困難、成本高等問題。
因此,本文結合氣壓驅動設計一款結構精簡、柔順性好、成本低的機械手。
1 柔性吞咽機械手結構設計
1.1 設計目標
基于前期對機械手的調研和分析,本文確定了具體設計目標:
(1)柔順性。機械手需具有自適應變形的能力和良好的抓取效果;
(2)結構簡單。結構復雜的機械手造成裝配困難、控制復雜,所以結構越簡單,性能越優良;
(3)結構創新。減少或者合并動作的執行,必將對機械手的抓取性能和效率有所改善。
1.2 整體結構設計
柔性吞咽機械手具有柔性自適應抓取和吞咽的功能,結構如圖1所示。
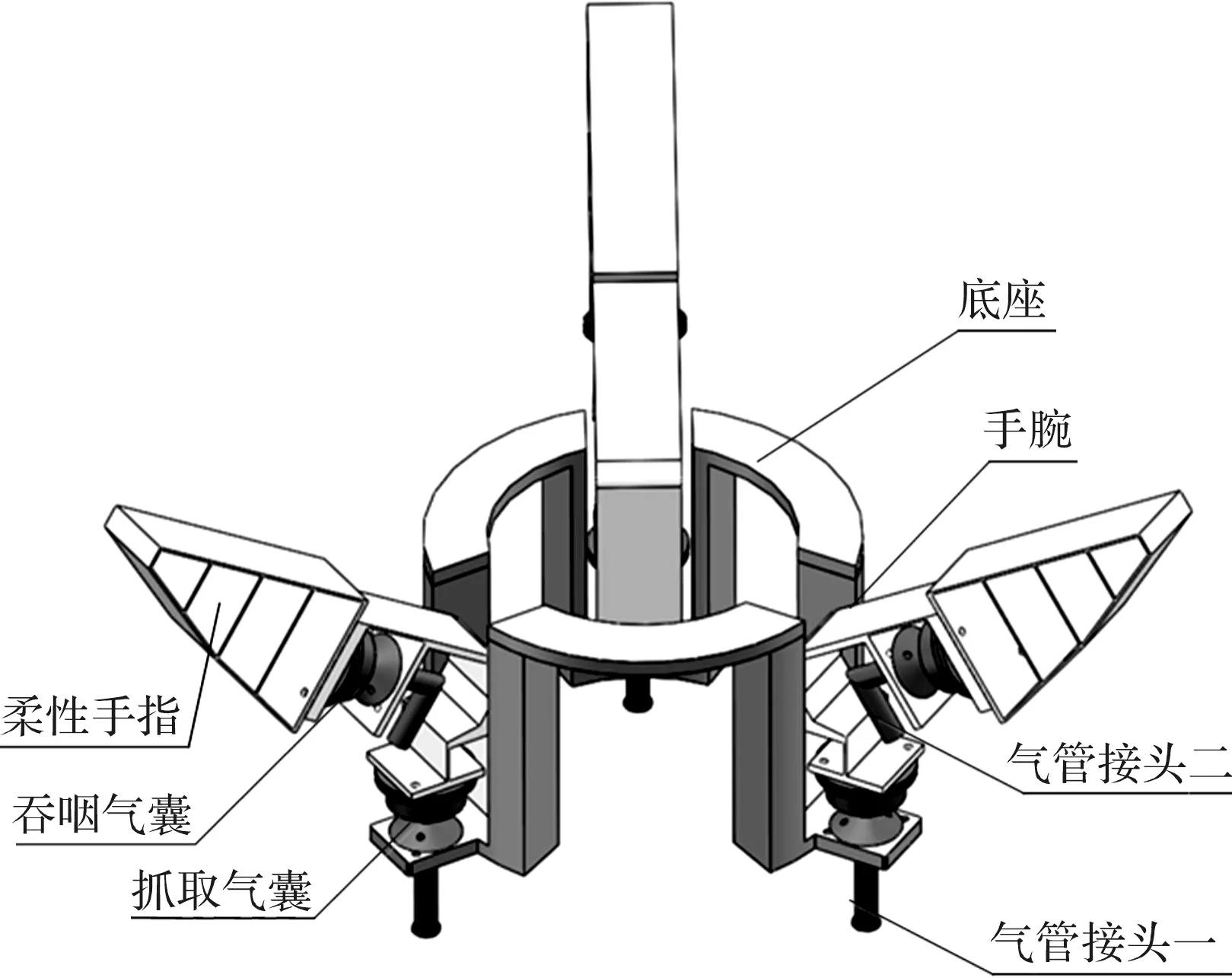
圖1 柔性吞咽機械手
機械手主要由柔性手指、氣動元件、氣管接頭、手腕和底座組成。柔性手指為三角形結構,底座中間為中空結構。手腕的上、下兩部分均可彎曲,氣動元件為可以壓縮和伸長的氣囊。通過氣囊的壓縮和伸長驅動手腕的變形,實現對球形果實的抓取和吞咽。
手腕設計為一體件,在氣動元件的驅動下進行彎曲變形,并具有彈性變形的功能,當驅動完成時,恢復至原狀。手腕頂端設有燕尾槽,可與柔性手指底端的燕尾槽相連,由于手腕和柔性手指的材料性能不同,裝配牢固可靠。
為了質量輕便,將驅動源后置,本文設計了氣動元件,氣動元件包括抓取氣囊和吞咽氣囊。抓取氣囊固定在手腕下部,氣嘴通過底座的圓孔直接安裝在氣管接頭一上。吞咽氣囊固定在手腕上部,通過手腕上的圓孔與氣管接頭二相連。筆者通過對氣動元件氣囊的伸長、縮短進行驅動,從而實現柔性吞咽機械手的抓取和吞咽功能。
1.3 流程分析
機械手的柔性主要體現在柔性手指和手腕上。氣動元件驅動手腕彎曲,與柔性手指的變形協調配合,對接觸對象進行抓取。具體的動作流程如圖2所示。
(1)抓取球形物。吞咽氣囊充入負壓氣體處于壓縮狀態,抓取氣囊充入正壓氣體帶動手腕彎曲,使得柔性手指處于豎直狀態,與物體接觸后柔性手指自適應物體變形,完成抓取功能;
(2)包裹球形物。抓取氣囊持續輸入正壓氣體保持不變,吞咽氣囊充入正壓氣體,達到設定值,此時柔性手指底端間距稍微變大,柔性手指指尖聚攏,使得柔性手指適應球形物發生變形,完成包裹;
(3)吞咽球形物。吞咽氣囊充入正壓氣體至設定值保持不變,減小抓取氣囊正壓氣體,此時柔性手指的上部聚攏,柔性手指底端間距變大,球形物下落,中空的底座與手腕的下部組成吞咽通道,物體下落到吞咽通道內,完成吞咽過程;
(4)減小吞咽氣囊正壓氣體,柔性手指打開恢復至氣囊自由狀態下,此時抓取氣囊和吞咽氣囊均充入負壓氣體處于壓縮狀態,柔性手指處于打開狀態。

圖2 動作流程示意圖
2 單手腕運動學分析
手腕下部分相對于底座存在一個轉動,手腕上部分相對于中間較厚的部分也有一個轉動,故整個手腕有兩個轉動自由度。手腕不發生彎曲變形的較厚部分直接簡化成連桿,發生彎曲變形的兩部分簡化成常曲率圓弧,柔性手指直接簡化成連桿。
平面四桿柔性機械手如圖3所示。

圖3 平面四桿柔性機械手示意圖b1—連桿1長度;a—連桿2長度;b2—連桿3長度;l3—連桿4長度;(x0,y0)—基礎坐標系,固定在基座上;(x1,y1),(x2,y2),(x3,y3),(x4,y4)—連體坐標系,分別固結在連桿1、2、3、4并隨它們一起運動;關節角順時針為負逆時針為正,假定z0、z1、z2、z3垂直于紙面向外
通過連桿坐標系可以得到柔性機械手的連桿參數,如表1所示。
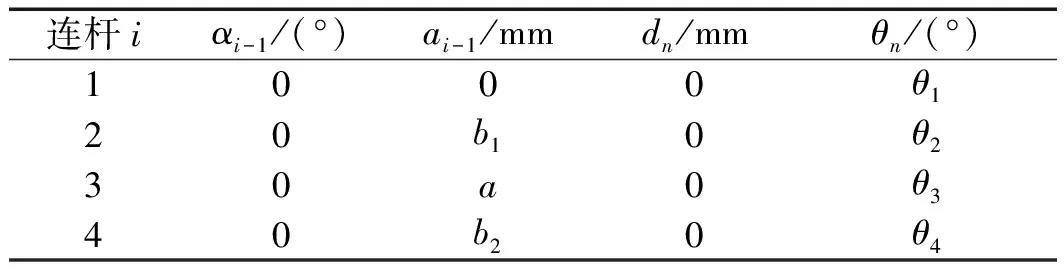
表1 連桿參數
本研究運用D-H方法建立其運動學方程。
可以得到第i個坐標系相對于第i-1個坐標系的齊次變換矩陣分別為:
(1)
(2)
(3)
(4)
(5)
(6)
其中:
θ1234=θ1+θ2+θ3+θ4,θ123=θ1+θ2+θ3,θ12=θ1+θ2。
即端點坐標為:
(7)
(8)
式中:α1—圓心角1;b1—圓心角α1對應的弦長;L1—圓心角α1對應的弧長;α2—圓心角2;b2—圓心角α2對應的弦長;L2—圓心角α2對應的弧長。
由弦長公式得:
(9)
(10)
由平面幾何關系可以得到θ1,2與α1,2的關系:
(11)
最后得到柔性手指的端點坐標:
(12)
(13)
其中,L1=42,L2=28,L3=102,a=60.67。
假設給定關節變量α1、α2的值,利用上式就可以計算出柔性機械手的位姿。
3 柔性吞咽機械手樣機驗證
3.1 樣機搭建
本文設計的柔性吞咽機械手采用FDM型3D打印加工制作而成,手腕和底座材料為PLA(生物降解塑料聚乳酸);柔性手指、抓取氣囊、吞咽氣囊材料為TPU(熱塑性聚氨酯彈性體)。
組裝完成的柔性機械手的質量僅為385 g。其中氣動部分主要包括氣管接頭和真空發生器,氣泵通過氣管充入正壓氣體,氣動元件膨脹伸長;依靠真空發生器充入負壓氣體,氣動元件收縮。
3.2 氣動元件形變量標定試驗
驅動元件安裝在樣機中,形變量受到手腕的制約,因此若要達到確定的位置,需要對驅動壓力和驅動角度進行標定。抓取氣囊的驅動角度為A,吞咽氣囊的驅動角度為B,氣囊標定試驗如圖4所示。
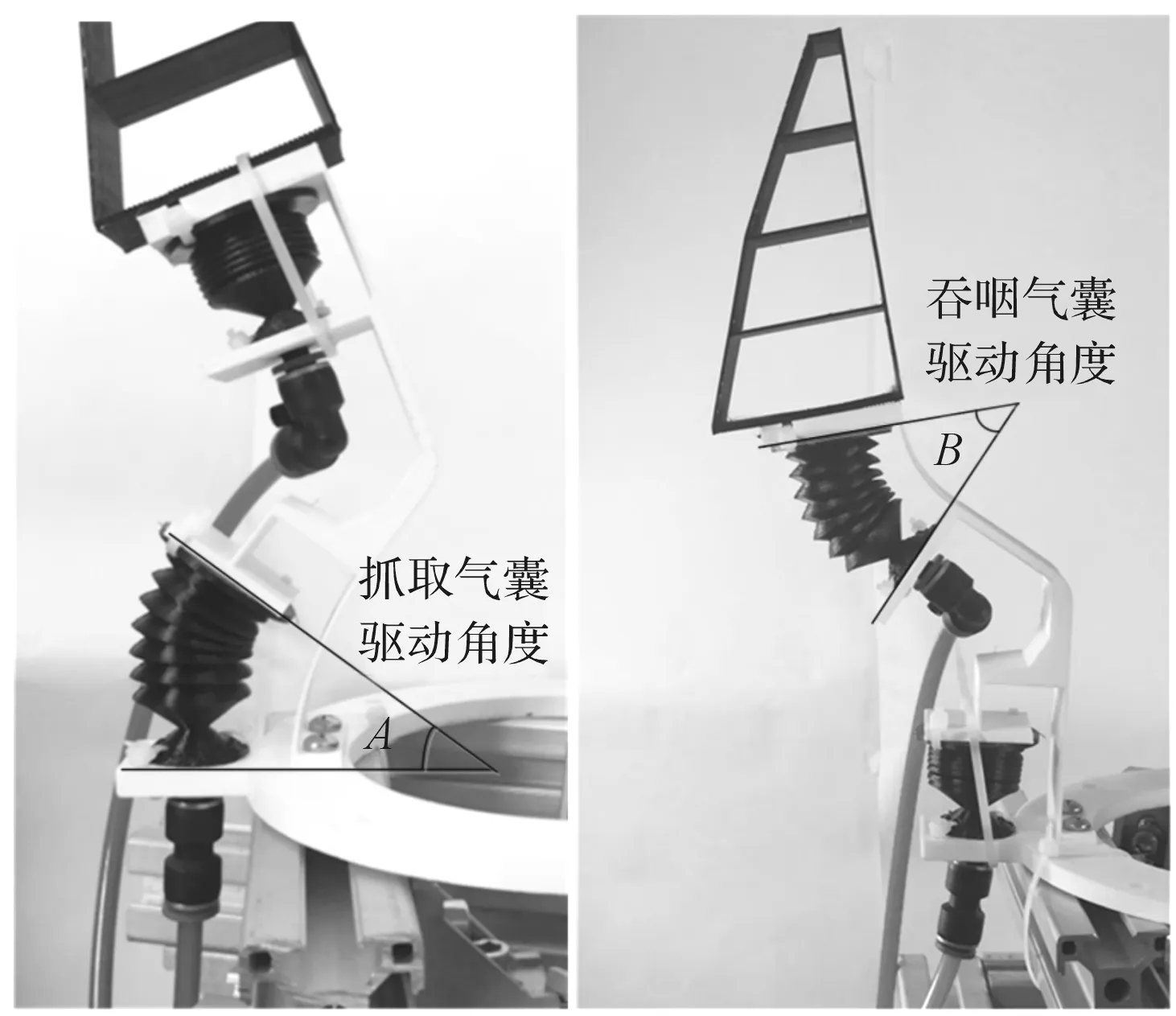
圖4 氣囊標定試驗
抓取和吞咽氣囊的標定試驗分開進行。當進行抓取氣囊試驗時,吞咽氣囊用扎帶捆住,只對抓取氣囊充氣,通過氣壓表來控制壓力,并利用攝像機對驅動元件變形過程進行拍攝記錄,從而得到角度值A,同理得到B。
本研究利用Matlab軟件的數據擬合模塊cftool對測得數據進行擬合,擬合曲線如圖5所示。
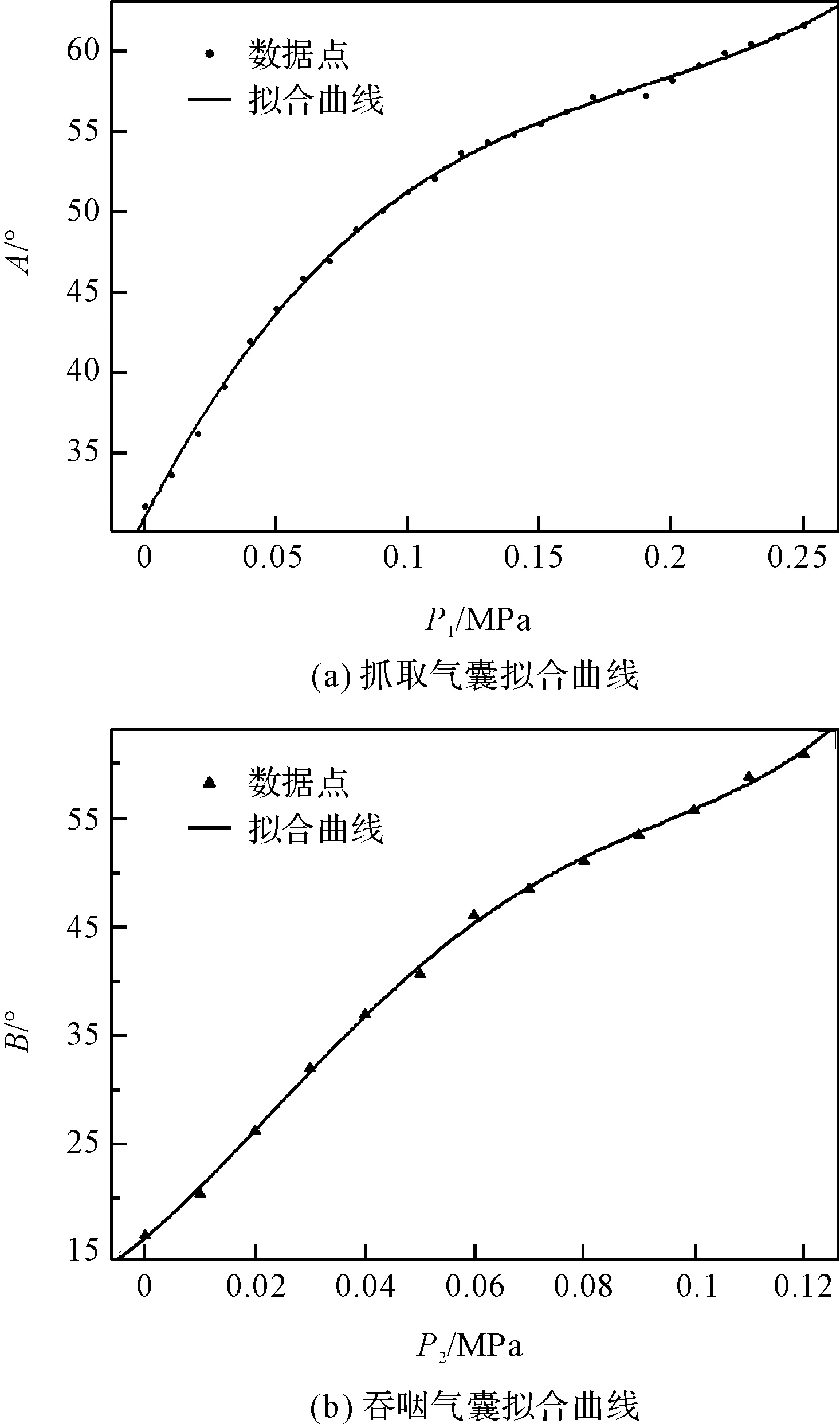
圖5 氣動元件擬合曲線
抓取氣囊驅動角度A與氣壓P1最后擬合的公式為:
(14)
式中:a—系數,取值為2 437;b—系數,取值為-1 385;c—系數,取值為316.4;d—系數,取值為31.07。
吞咽氣囊驅動角度B與氣壓P2最后擬合的公式為:
(15)
式中:a—系數,a=4.334*105;b—系數,b=-1.018×105;c—系數,c=5 579;d—系數,d=421.6;e—系數,e=16.26。
這樣,通過擬合公式便可以由氣壓控制氣囊的驅動角度。
3.3 抓取試驗及結果分析
筆者設定抓取氣囊的壓力值為0.25 MPa,吞咽氣囊的壓力值為0.12 MPa。本研究對西紅柿進行15次抓取試驗。試驗流程如圖6所示。

圖6 樣機抓取試驗
通過樣機試驗可以發現:柔性手指在與西紅柿的接觸過程中變形良好,氣動元件靈活,果實下落過程順滑,基本滿足柔性機械手的設計要求。
本研究對照片進行處理,通過GetData軟件得到不同過程中相對應的驅動元件的角度,對15次數據求取平均值,如表2所示。
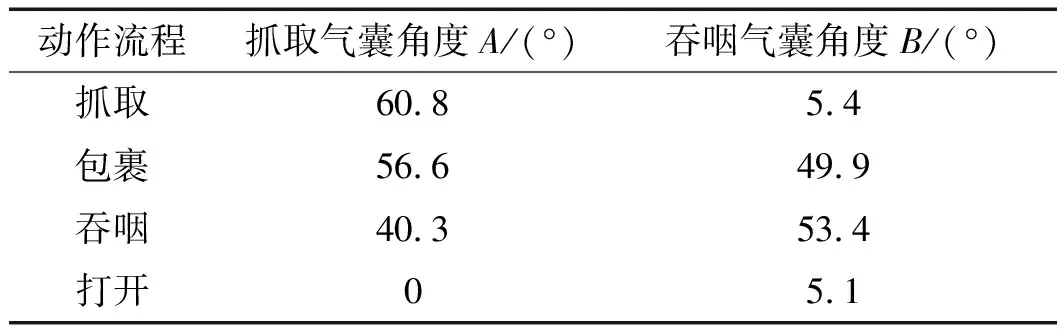
表2 驅動角度平均值
通過角度的變化,柔性機械手實現了良好的抓取和吞咽功能,也驗證了運動學方程的正確性。按照理論分析,吞咽氣囊角度B在抓取和打開過程中的值都為0,但由于多次試驗氣囊內部存有殘留氣體,使得角度測量值有所誤差。
4 結束語
本文利用D-H坐標法和常曲率變形建立了單手腕的運動學方程,基于3D打印搭建了樣機,并進行了氣動元件形變量的標定試驗和對西紅柿的抓取試驗。試驗結果表明:柔性機械手可以實現果實的無損抓取、達到良好的吞咽效果,也驗證了運動學分析的正確性。
該結構精簡、自適應性強,通過柔性手指的自適應變形抓取對象,通過角度的控制可以實現良好的吞咽效果。
猜你喜歡
智慧少年·故事叮當(2020年10期)2020-11-06 06:19:00
中華詩詞(2020年1期)2020-09-21 09:24:52
河北理科教學研究(2020年1期)2020-07-24 08:14:34
作文成功之路·小學版(2020年11期)2020-02-01 06:26:58
作文周刊·小學二年級版(2018年29期)2018-11-26 11:20:28
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
童話世界(2018年14期)2018-05-29 00:48:08
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
