室內定位技術綜述
2018-12-25 08:29:32彭宏玉劉玉民郝天鹿
唐山師范學院學報 2018年6期
關鍵詞:信號
彭宏玉,劉玉民,郝天鹿
?
室內定位技術綜述
彭宏玉,劉玉民,郝天鹿
(唐山學院 計算機科學與技術系,河北 唐山 063000;唐山學院 唐山市室內定位技術重點實驗室,河北 唐山 063000)
綜述了目前典型的室內定位技術,分析了每種典型技術的優點及缺點,同時給出了三角定位法的詳細實現原理及推導,從而為室內定位研究系統大范圍應用部署提供支持。
物聯網;定位;室內定位
定位技術融合了移動技術以及實時方向判斷技術[1-2]。定位服務需要借助GIS地圖實時獲取坐標點感知數據。定位系統通過計算當前位置與信標的距離和角度就可以獲得當前位置的具體坐標值[3-4]。近年來,已經有大量的室內定位系統被研發出來[5-7]。本文總結了室內定位系統中慣性導航法、感知探測法、三角測量法以及模式識別法等關鍵定位技術。
1 慣性導航定位法
慣性導航是室內定位中一種主動定位技術,根據定位物體當前位置預估定位物體下一個位置。當定位物體移動時,慣性導航定位系統通過測程法獲取的數據進行聚集運算來預測定位物體的下一個位置。測程法所需數據可以通過傳感器例如加速器、磁力傳感器、羅盤以及陀螺儀等共同獲得[8-10],或者通過定位物體的平均行走速度來獲取[11]。定位物體的初始位置,可以通過GPS、RFID標簽、或者移動電話定位系統獲取[12]。
定位物體位置估算是個遞歸過程,隨著時間的積累,預估的不精確會導致定位誤差,定位誤差會逐步累積,但是可以通過環境實時信息[13]、RFID標簽[14]、超聲波信標[15]以及地圖匹配技術進行矯正[16,17]。直接定位技術優點在于:只需安裝少量的識別器,因此安裝費用低廉。
慣性導航法的主要缺點在于:不精確、并且需要和其他定位技術結合使用。如果主動定位系統使用RFID標簽對精確度進行矯正,系統將會具有RFID定位系統的所有缺點,包括:架構的變化以及用戶需要隨身攜帶RFID閱讀器。如果地圖匹配或者路標被用來進行錯誤矯正,那么定位環境的相關信息需要提前準備及存儲,而這個準備過程所需費用很高。
2 感知探測定位法
感知探測定位通過事先部署的識別器以及標簽感知來確定定位物體的位置。當前有兩種感知探測法來確定定位物體的位置:一是將定位信息以及待定位物體相關信息存儲在定位標簽中;二是將定位信息以及待定位物體相關信息存儲在數據庫中,使用的時候通過存儲在定位標簽中唯一標識進行檢索。通過標簽感知足以定位一個人或者一個物體,而標簽讀取器可以手持,也可以植入鞋中、或者拐杖中[14]。人或者物體的具體位置可以通過與標簽相對位置的變化來計算[15]。按定位標簽來劃分可以分為5種技術。
2.1 無線射頻識別技術
RFID標簽是當前室內定位系統中應用最廣的一種定位標簽。基于RFID技術室內定位系統中的RFID標簽可是以主動的[16]、可以是被動的、也可以部分主動、部分被動[17]。主動RFID標簽包含電池并且能自主傳輸信號。由于主動RFID標簽具有更大的傳輸距離,因此可以大大降低為達到定位目的而部署RFID標簽的數量。主動標簽的缺點是電池需要定期更換。被動標簽不需要電池并且通過讀取器遠程充電進行信號傳輸。與主動標簽相比,被動標簽更便宜、傳輸距離更短、存儲空間更小[18]。同時增加了部署費用,因為RFID標簽中存儲一個ID以及相關定位信息。主動RFID標簽中存儲空間可以存儲128 KB的數據,被動RFID標簽存儲空間中可以存儲不超過128 bytes的數據[19]。通常情況下,RFID標簽本身是比較便宜的,但是RFID標簽的安裝費用比較昂貴,因此這些RFID標簽需要安裝在地板上或者墻上用來定位人或者物[20]。比如,在進行室內定位部署時,如果需要將RFID標簽部署在地板上,當地板上鋪有地毯時,部署花費會比較低,當地板的材質是水泥或者大理石時,部署RFID標簽的費用會非常高昂。RFID室內定位技術的另外一個缺點是:人體會阻擋射頻信號,從而導致定位精度降低[21]。便宜的RFID標簽(被動RFID標簽)信號傳輸距離短,因此必須大量部署,如果部署密度不足時,會導致探測不到定位物體[22]。相比之下,主動RFID標簽傳輸距離長,但是必須有源。
2.2 紅外技術
基于紅外室內定位技術,需要在已知位置安裝紅外發射器,每一個紅外發射器在一個圓錐形區域都會廣播一個唯一的ID[23]。定位人或者物體需要攜帶紅外接收器用于在圓錐形信號覆蓋區獲取紅外發射器發射的信號。在典型的紅外室內定位系統中,不但廣播定位對象的位置信息,而且提供環境相關信息以及圖形化移動軌跡信息[24]。紅外室內定位相比RFID有一定難度,由于傳輸角度窄的問題,紅外室內定位技術需要瞄準線。紅外室內定位技術的缺點在于:自然光以及人造光會對紅外室內定位造成干擾[25]。由于通過紅外技術進行室內定位時,需要部署大量定位標簽,因此安裝費用比較昂貴。
2.3 超聲波定位技術
超聲波室內定位技術需要部署大量的超聲波發射器來廣播短波超聲波。超聲波發射器需要事先部署好,并且定位對象需要隨身攜帶超聲波接收器。由于接收器接收到最近的兩個發射器廣播發射來的超聲波信號傳輸時間不同,利用這個不同即可以計算出定位對象的位置。通過發射器與接收器進行超聲波交互,可確定定位對象的初始方位[26]。其他的典型超聲波室內定位系統是將超聲波發生器以及接收器反過來進行部署[27]。超聲波室內定位技術的缺點是墻等障礙物會反射或者阻擋超聲波信號,這將會導致室內定位精度下降。超聲波室內定位技術的另外一個缺點是:在定位時,需要信標(與接收器直接進行對準)。
2.4 藍牙信標
藍牙信標也是一種廣泛應用于室內定位領域的定位技術。在采用藍牙信標進行室內定位時,由于藍牙設備的延遲問題,定位對象移動速度不能太快[28]。藍牙信標必須是有源的,因此藍牙信標存在電池續航問題。在基于藍牙信標室內定位系統運行過程中需要配備電池電量檢測系統,主要目的是查看其電池電量。基于藍牙信標的室內定位的主要缺點是:需要在天花板、墻上、或者地面部署發射器以及接收器,會改變原來的基礎設施,增加部署費用。
2.5 條碼技術
在基于條形碼技術的室內定位系統中,定位對象需要攜帶一個條形碼閱讀器。當定位對象需要路徑導航時,定位對象需要沿途掃描條形碼,基于該定位對象唯一的ID就可以對其進行定位。基于條碼技術的室內定位系統可以根據定位對象的ID為其提供定位信息、環境周圍信息以及定位對象的移動位置是否正確[29]。基于條碼技術的室內定位的優點在于:花費低、容易安裝及維護。這種室內定位技術的缺點在于:定位對象需要沿途找到并且通過條碼閱讀器掃描每一個條碼,因此這個過程是繁瑣的,容易降低導航速度,并且視覺有障礙的用戶可能會難以使用這種室內定位系統。
此外,也有研究者采用多種技術來設計定位信標[30],這些技術包括傳感器、羅盤以及粒子濾波技術等。
3 三角測量定位法
采用三角測量法進行室內定位的系統,需要事先安裝定位標簽,室內定位標簽安裝后可以進行室內定位、也可以進行室外定位。定位標簽可以采用RFID定位標簽,也可以是用紅外標簽或者超聲波標簽[31]。
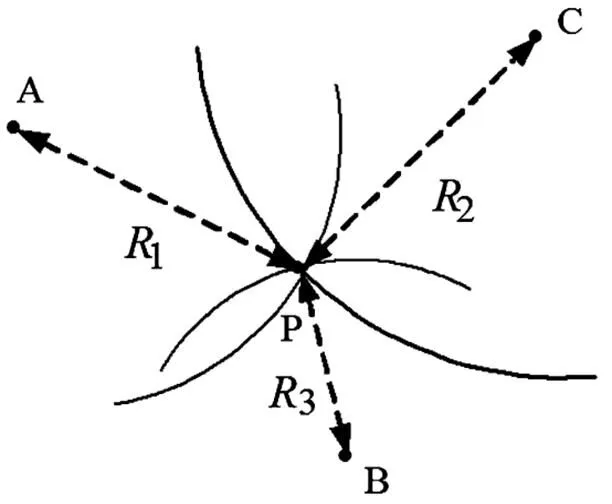
圖1 三角定位法
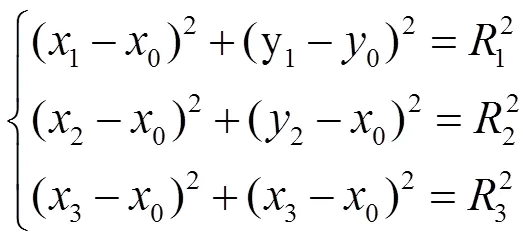

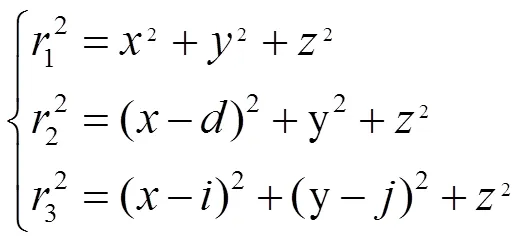
當等于0時,三個球變為三個圓在水平面上相交于一點,由公式(2)可以解出。

將公式(2)中的第一個公式的2代入第二個公式,再與第三個公式一起解出。

由以上可知,在使用三角測量法對一個定位對象進行定位時,需要至少三個已知信標,采用最小二乘法計算三個已知信標點與定位目標的距離來定位目標的位置。系統也可以采用角度測量法計算至少三個新標點與定位目標的角度來確定目標的位置。GPS是目前最典型的基于衛星位置采用三角定位法實現室外定位[32]。使用高精度GPS定位系統可以將定位精度提高到10 cm以內,由于GPS信號是單向的,因此通過GPS系統進行定位時,有利于保護用戶的隱私。但在室內或者高層建筑之間會產生信號衰減而使得定位和導航功能失效的問題,這可以借助基站定位法和無線局域網定位法解決。這兩種方法由于多波反射問題與GPS系統定位精度相比,定位精度較低[33]。
4 模式識別定位法
基于模式識別的定位算法需要定位目標攜帶一個或者多個傳感器來感知數據,并且要與之前收集的感知數據進行比較。感知數據地圖可以通過不同位置的傳感器采樣來產生。
4.1 計算機視覺
基于計算機視覺的定位技術要求用戶攜帶一架攝像機,或者攜帶一個手持設備并在該設備上嵌入一臺攝像機。在基于計算機視覺的定位系統中,隨著用戶的移動,攝像機拍照并通過圖像匹配來確定用戶的位置和方向,以此達到定位目的。基于計算機視覺的定位方法有兩個主要缺點。一是需要大量的存儲設備存放匹配的圖片;二是需要強大計算處理能力來進行圖片匹配。因此需要用戶佩戴一個較大的設備,這可能會給用戶行動帶來不便[33]。
4.2 信號或指紋分布
基于信號分布或指紋分布的定位技術需要系統對一個或者多個信號源發來的信號數據與事先存儲在數據庫中相應的信號數據地圖進行比較。這種室內定位系統在定位前需要進行訓練。當用戶定位時,接收到的定位節點信號強度以及傳播時間將會被計算并且與存儲在數據庫中最近的匹配進行比較。來自無線局域網訪問節點的信號強度就是一個基于信號分布定位的例子。無線局域網基站定位的一個特點就是用相對數量比較少的無線局域網基站就可以實現室內人員定位[34]。隨著室內環境無線局域網日益普及,已部署基站足夠實現室內定位,而不需要投資新建基站來進行室內定位[35]。其他信號分布室內定位技術都是將多種低成本傳感器結合起來實現定位,包括加速器、磁力感應器、溫濕度傳感器以及光照傳感器[36]。創建一個包括大量傳感器地圖是非常耗時間的,而且這個地圖可能由于溫度光照以及受每天和季節更迭影響導致不可靠。
[1] Xu W, Wang J, Shen H, et al. Indoor Positioning for Multiphotodiode Device Using Visible-Light Communi- cations[J]. IEEE Photonics Journal, 2017, 8(1):1-11.
[2] Davidson P, Piché R. A Survey of Selected Indoor Positioning Methods for Smartphones[J]. IEEE Com- munications Surveys & Tutorials, 2017, 19(2): 1347- 1370.
[3] Xu H, Ding Y, Li P, et al. An RFID Indoor Positioning Algorithm Based on Bayesian Probability and K- Nearest Neighbor[J]. Sensors, 2017, 17(8): 1791-1806.
[4] He S, Chan S H G. Wi-Fi Fingerprint-Based Indoor Positioning: Recent Advances and Comparisons[J]. IEEE Communications Surveys & Tutorials, 2017, 18(1):466-490.
[5] Chen X, Zou S. Improved Wi-Fi Indoor Positioning Based on Particle Swarm Optimization[J]. IEEE Sensors Journal, 2017, 99:1-1.
[6] Li Z, Yang A, Lv H, et al. Fusion of visible light indoor positioning and inertial navigation based on particle filter[J]. IEEE Photonics Journal, 2017, 99:1-1.
[7] Rusli M E, Ali M, Jamil N, et al. An Improved Indoor Positioning Algorithm Based on RSSI-Trilateration Technique for Internet of Things (IOT)[C]. International Conference on Computer and Communication Engi- neering: IEEE, 2017: 72-77.
[8] Chen P, Kuang Y, Chen X. A UWB/Improved PDR Integration Algorithm Applied to Dynamic Indoor Positioning for Pedestrians[J]. Sensors, 2017, 17(9): 2051-2065.
[9] Pei L, Liu D H, Qian J C. A Survey of Indoor Positioning Technology and Application[J]. Navigation Positioning & Timing, 2017, 11(9): 65-71.
[10] Ji C, Yuan M, Li R, et al. Indoor positioning based on K-means and the weighted optimized k-NN algorithm [J]. Electronic Measurement Technology, 2018, 16(7): 101-116.
[11] Wang K. Research on indoor positioning algorithm based on Wi Fi and Hidden Markov Model[J]. Computer Era, 2018, 15(5):21-36.
[12] Jingxue B I, Wang Y, Cao H, et al. A Method of WiFi Indoor Positioning Based on Omnidirectional Fingerprint Database[J]. Bulletin of Surveying & Mapping, 2018, 17(11): 35-50.
[13] Nakamura K, Aono Y, Tadokoro Y. A walking navigation system for the blind[J]. Systems & Computers in Japan, 2015, 28(13): 36-45.
[14] Chumkamon S, Tuvaphanthaphiphat P, Keeratiwin- takorn P. A blind navigation system using RFID for indoor environments[C]. Telecommunications and Information Technology: IEEE, 2008: 765-768.
[15] Willis S, Helal S. RFID information grid and wearable computing solution to the problem of wayfinding for the blind user in a campus environment[J]. IEEE International Symposium on Wearable Computers, 2011, 10(7):71-86.
[16] D'Atri E, Medaglia C M, Serbanati A, et al. A system to aid blind people in the mobility: A usability test and its results[C]. International Conference on Systems: IEEE, 2007: 35-35.
[17] Kulyukin V, Gharpure C, Nicholson J, et al. Robot- assisted wayfinding for the visually impaired in structured indoor environments[J]. Autonomous Robots, 2006, 21(1): 29-41.
[18] Ding B, Yuan H, Zang X, et al. The Research on Blind Navigation System Based on RFID[C]. International Conference on Wireless Communications: IEEE, 2007: 2058-2061.
[19] Ni L M, Liu Y, Lau Y C, et al. LANDMARC: Indoor Location Sensing Using Active RFID[C]. IEEE International Conference on Pervasive Computing and Communications: IEEE, 2003:701-710.
[20] Wu N C, Nystrom M A, Lin T R, et al. Challenges to Global RFID Adoption[J]. Technovation, 2006, 26(12): 1317-1323.
[21] Ross D A, Blasch B B. Development of a Wearable Computer Orientation System[J]. Personal & Ubiquitous Computing, 2002, 6(1): 49-63.
[22] J?rg Baus, Wahlster W. A resource-adaptive mobile navigation system[C]. International Conference on Intelligent User Interfaces: DBLP, 2002:15-22.
[23] Tsetsos V, Anagnostopoulos C, Kikiras P, et al. Semantically enriched navigation for indoor environ- ments[J]. International Journal of Web & Grid Services, 2006, 2(4):453-478.
[24] Liu H, Darabi H, Banerjee P, et al. Survey of Wireless Indoor Positioning Techniques and Systems[J]. IEEE Transactions on Systems Man & Cybernetics Part C, 2007, 37(6): 1067-1080.
[25] Ran L, Helal S, Moore S. Drishti: An Integrated Indoor/Outdoor Blind Navigation System and Service [J]. Proc Percom, 2004, 15(8): 23-37.
[26] Priyantha N, Chakraborty A, Balakrishnan H. The Cricket location-support system[C]. International Conference on Mobile Computing and Networking: ACM, 2000: 32-43.
[27] Lorincz K, Welsh M. MoteTrack: a robust, decentralized approach to RF-based location tracking [J]. Personal & Ubiquitous Computing, 2007, 11(6): 489-503.
[28] Huang H, Gartner G, Schmidt M, et al. Smart Environment for Ubiquitous Indoor Navigation[C]. International Conference on New Trends in Infor- mation and Service Science: IEEE, 2009: 176-180.
[29] Hightower J, Borriello G. Location systems for ubiqui- tous computing[J]. Computer, 2001, 34(8): 57-66.
[30] 何靜濤,王奎,代文斌,朱舒歡,姚平平.物聯網技術在高校圖書館管理中的應用[J].唐山師范學院學報,2016, 38(5):143-145.
[31] 孫曄.京津冀一體化與區域智慧物流的協同發展[J].唐山師范學院學報,2015,37(5):149-152.
[32] 朱程.淺析信任管理在物聯網安全中的應用[J].唐山師范學院學報,2015,37(2):52-54.
[33] 劉曉春.加快唐山市物聯網發展打造“U唐山”的對策[J].唐山師范學院學報,2011,33(5):98-100.
[34] Chang Y J, Tsai S K, Wang T Y. A context aware handheld wayfinding system for individuals with cognitive impairments[C]. International ACM Sigaccess Conference on Computers and Accessibility: DBLP, 2008:27-34.
[35] Bessho M, Kobayashi S, Koshizuka N, et al. A space-identifying ubiquitous infrastructure and its application for tour-guiding service[C]. Proc. of 2008 ACM symposium on applied computing: ACM, 2008: 1616-1621.
[36] Huang B, Liu N. Mobile Navigation Guide for the Visually Disabled[J]. Transportation Research Record Journal of the Transportation Research Board, 2004, 1885,(1): 28-34.
A Survey of Indoor Positioning Technology
PENG Hong-yu1,2, LIU Yu-min1,2, HAO Tian-lu1,2
(Department of Computer Science and Technology, Tangshan College, Tangshan 063000, China; Tangshan Key Laboratory of Indoor Positioning Technology, Tangshan 063000, China)
Typical outdoor positioning technologies are introduced. The advantages and disadvantages are also summarized. At the same time, the realization of trilateration is introduced so as to promote the extensive deployment of indoor positioning systems.
internet of things; indoor positioning; path plan
TP39
A
1009-9115(2018)06-0082-05
10.3969/j.issn.1009-9115.2018.06.019
博創基金項目(1401801),西南交大合作智慧水務項目(1200305),唐山市科技計劃項目(220020502)
2018-07-30
2018-09-19
彭宏玉(1977-),男,滿族,河北唐山人,博士,講師,研究方向為物聯網。
(責任編輯、校對:田敬軍)
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
