抑制鉆柱黏滑振動和鉆頭反彈的建模與控制
2018-12-20 03:49:22張奇志吳永強
石油鉆采工藝 2018年5期
張奇志 吳永強
1.西安石油大學電子工程學院;2.陜西省油氣井測控技術重點實驗室
鉆柱黏滑振動是由強烈的橫向振動和地下摩擦阻力引起的一種極具破壞性的扭轉振動現象,而鉆頭反彈是由鉆頭與巖層之間軸向運動產生的一種軸向振動現象。近年來,為了抑制鉆柱黏滑振動,國內外專家學者對該問題進行了大量研究,其研究的主要內容可概括為3個方面:(1)通過對鉆柱旋轉系統、起升系統的簡化,建立鉆柱黏滑振動的動力學模型,分析鉆頭類型、鉆井參數及負載特性對黏滑振動的影響,并進一步對黏滑振動的成因和規律進行分析和總結[1-2];(2)通過鉆井勘探現場和室內實驗對鉆柱黏滑振動的成因、特點及其控制策略進行分析研究,例如劉曙光等提出柔性扭矩控制方法來消除鉆柱黏滑振動現象[3-4];(3)采用 Abaqus、ANSYS 和Patran/Nastran等有限元分析模擬仿真軟件建立鉆柱系統黏滑振動和鉆頭擊破巖層的有限元模型,研究鉆柱黏滑振動的特性及規律,進而對理論分析和試驗結果進行驗證[5]。
國內外專家學者的研究在很大程度上抑制了鉆柱黏滑振動現象,然而在對鉆柱黏滑振動進行控制的同時忽略了鉆頭反彈問題。筆者基于黏滑振動和鉆頭反彈的運動機理,建立了鉆柱旋轉系統和起升系統的動力學模型,設計了基于線性二次型(LQR)控制策略的鉆柱旋轉系統和起升系統的狀態反饋控制器,用于抑制鉆柱黏滑振動和鉆頭反彈現象。仿真結果表明,LQR控制器的引入使得鉆頭轉速穩定在給定轉速附近,減少了鉆壓和扭矩波動,抑制了黏滑振動與鉆頭反彈現象,鉆柱運行更加平穩。
1 鉆柱系統的動力學模型
在鉆井過程中,由直流電機經變速箱傳動帶動轉盤旋轉,轉盤通過方鉆桿來帶動井底鉆具組合(Bottom hole assembly,簡稱 BHA),從而實現鉆頭旋轉鉆進擊破巖石。其旋轉系統的簡化模型如圖1所示。
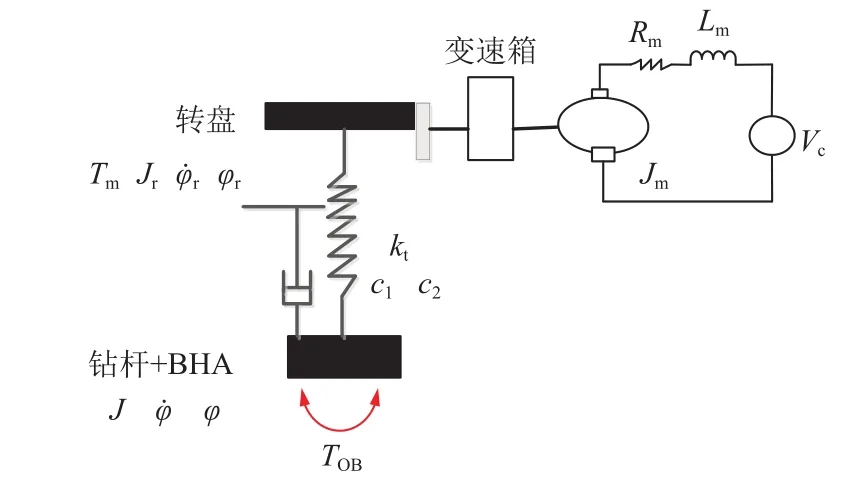
圖1 鉆柱旋轉系統簡化模型Fig. 1 Simplified model of rotation system of drill string
假設絞車給定快繩的拉力為F0,其經過游車和大鉤帶動鉆桿及井下設備完成鉆柱系統的起升功能,起升系統的簡化模型如圖2所示。
1.1 鉆柱旋轉系統數學模型
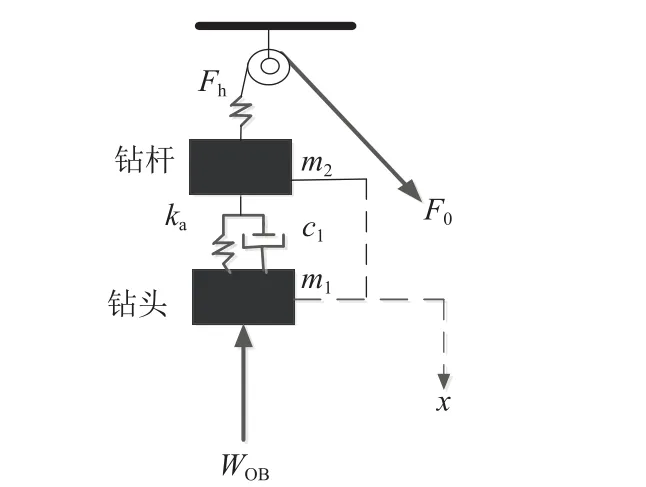
圖2 鉆柱起升系統簡化模型Fig. 2 Simplified model of lifting system of drill string
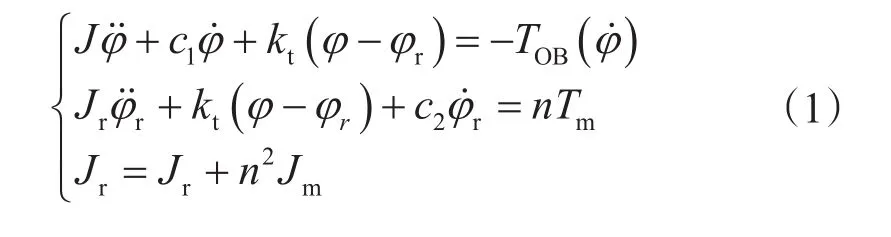
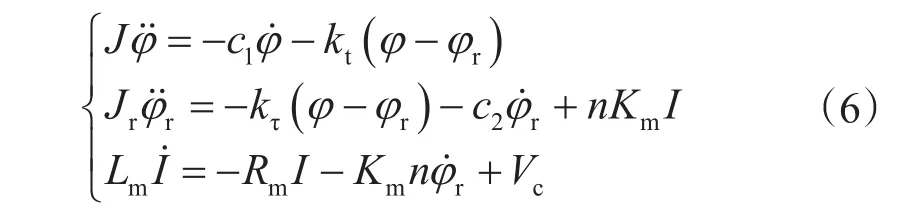
在圖1中,鉆柱旋轉系統的運動方程可表示為鉆柱旋轉系統的驅動電機以他勵直流電動機為例,其特性方程可表示為

式中,φ、φr分別為鉆頭和轉盤的角位移,rad;分別為鉆頭和轉盤的角速度,rad/s;J、Jr、Jm分別為鉆柱、轉盤和電機的轉動慣量,kg·m2;TOB(φ˙)為鉆頭扭矩,N·m;c1為鉆柱與鉆井液之間的阻尼系數,N·s/rad;c2為轉盤阻尼系數,N·s/rad;kt為鉆柱旋轉方向的阻尼,N·m/rad;Tm為直流電動機驅動扭矩,N·m;I為直流電機的電流,A;Rm為直流電機的電樞電阻,Ω;Lm為直流電機的電樞電感,H;Vc、E分別為直流電機輸入電壓和反電動勢,V;ωd為鉆頭給定角速度,rad/s;Km為電機常數,V/s;n為直流電動機與變速箱的齒輪比。
1.2 鉆柱起升系統數學模型
在圖2中,鉆柱起升系統運動方程可表示為

鉆壓WOB可表示為

其中鉆頭的扭矩TOB與鉆壓WOB相關[6],鉆頭扭矩可表示為

其中
式中,ma為鉆井設備總質量,kg;x為鉆頭軸向位移,m;Fh為大鉤負載,N;kc為地層剛性系數,MN/m。
1.3 鉆頭負載特性模型
在雙自由度鉆柱旋轉系統的模型中,旋轉系統摩擦力矩可簡單認為是鉆頭上的反力矩TOBr和BHA上的非線性摩擦力矩TOBf之和[6]。圖3為鉆頭摩擦力矩與鉆頭角速度的關系圖。
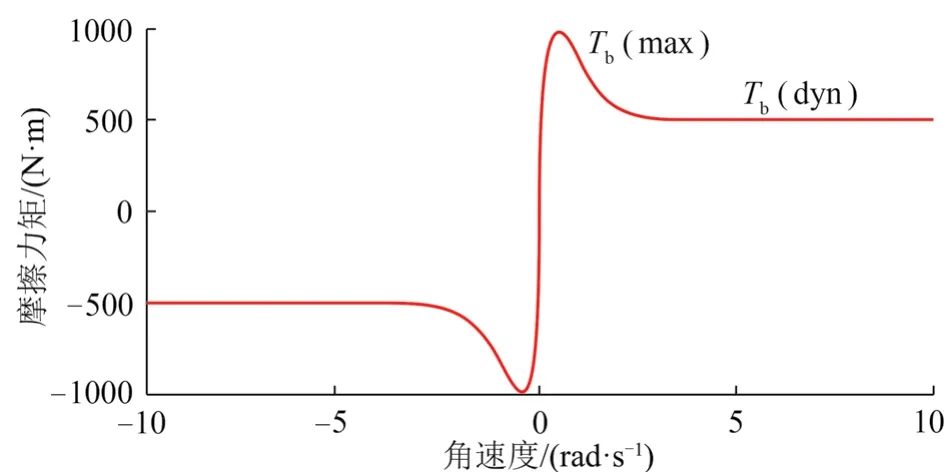
圖3 摩擦力矩與鉆頭角速度的關系Fig. 3 Relationship between friction torque and bit angular velocity
2 控制器設計
為消除黏滑振動和鉆頭反彈問題,本文將分別設計線性二次性(LQR)控制的鉆柱旋轉系統和起升系統的狀態反饋控制器[7-8]。
2.1 扭轉狀態反饋控制器
對方程(1)、(2)進行線性化處理得到鉆柱旋轉系統的平衡方程為
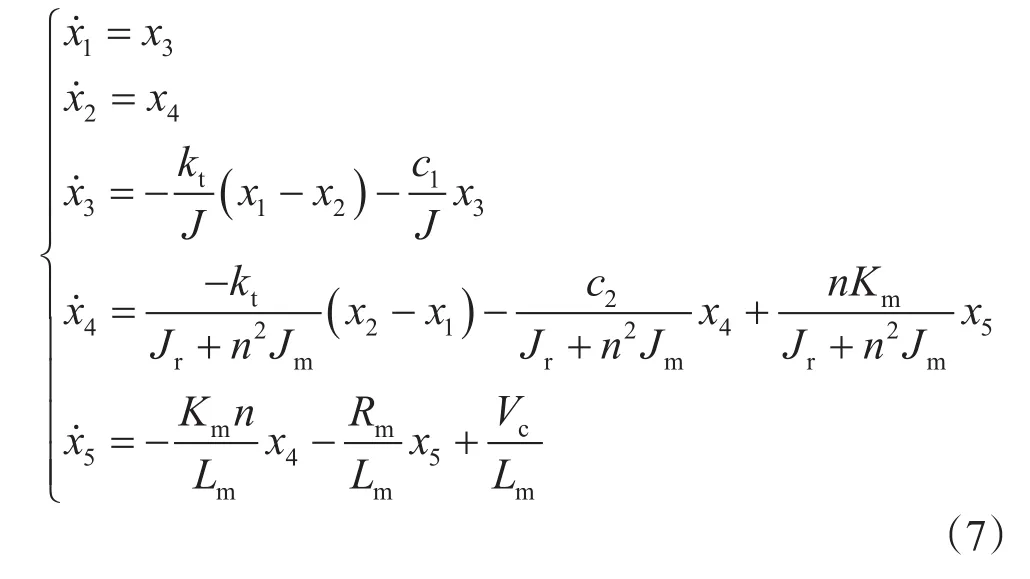
將式(7)寫成狀態空間形式為

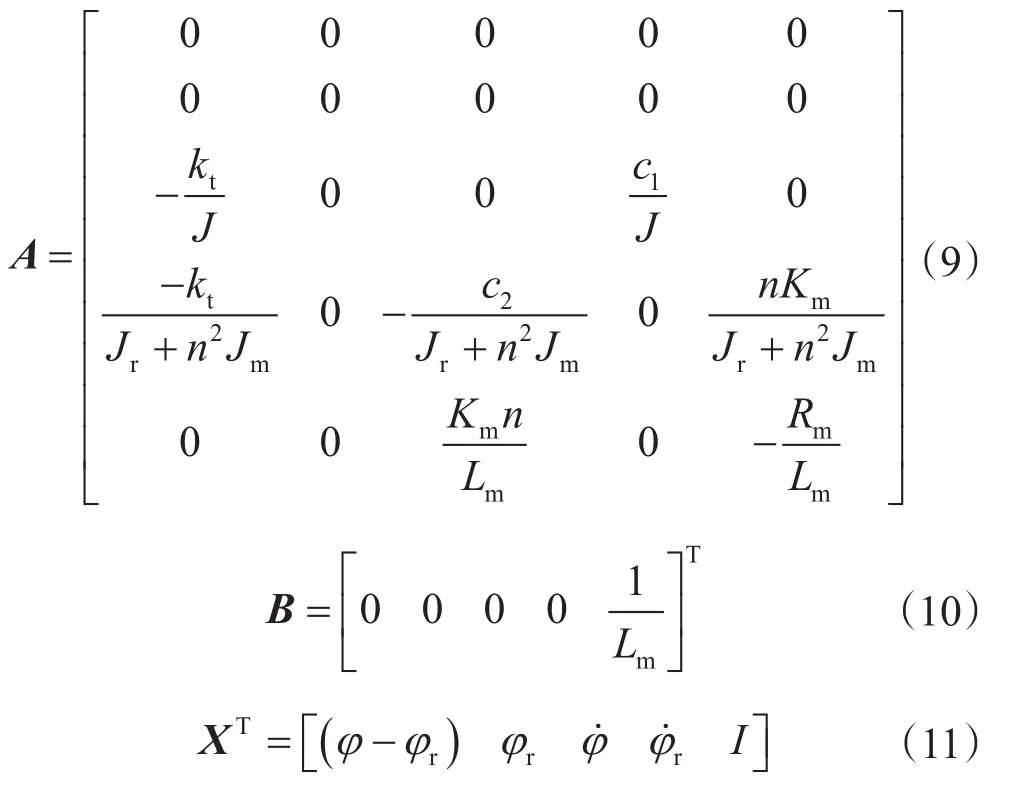
式(8)中的A為系數矩陣,B為輸入矩陣,X為狀態矢量,其分別表示為
在設計LQR控制器前,需設計一個能量函數Φ,最優控制軌跡應該使得能量函數最小[7-8],一般選取能量函數為

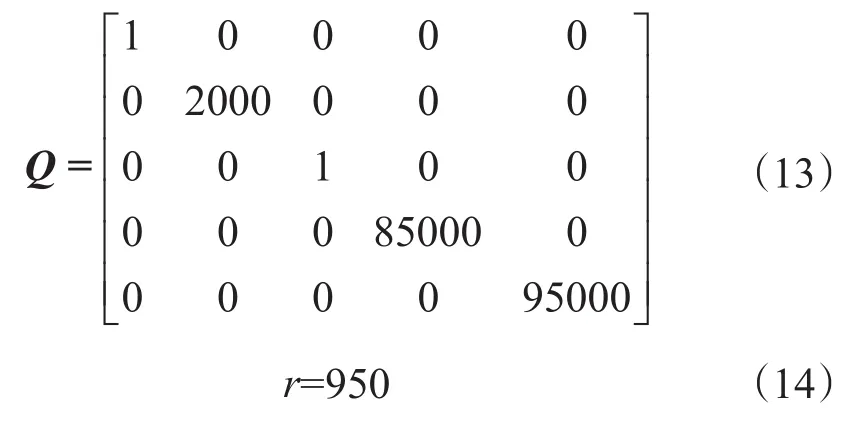
根據式(6)旋轉系統的平衡方程可選取X為式(11)的5個狀態向量,又因為本系統旋轉方向的輸入為轉盤電機的供給電壓Vc,且為一維向量,則UTrU可表示為rVc2。此外,要使能量函數Φ最小,則狀態向量X和輸入U都要小。Φ最小表明其為有界函數,隨著時間t趨于無窮,狀態向量X將趨于0,這也保證了閉環系統的穩定性。輸入Vc小,則表示用最小的控制代價得到最優控制。式(12)中,Q是設計的半正定矩陣,r是正定矩陣。一般來說,如果Q值選得大,而要使Φ最小,則X需要更小,也就意味著閉環系統的矩陣(A–Bρ)的特征值處于S平面的左半平面,這樣狀態X就以更快的速度衰減到0。r與輸入變量Vc有關,Vc的減小,意味著狀態衰減將變慢。綜合考慮這些因素,在設計扭轉反饋控制器時,參數Q和r可分別選取為:因此,轉盤電機的供給電壓可表示為

其中

P的求取可根據Riccati方程

在沒有任何干擾的情況下,Vref是維持轉盤轉速給定電壓。為了使鉆柱振動得到控制,電機供給電壓的扭轉狀態反饋控制器可以表示為

通過計算可得狀態反饋控制增益ρ可表示為[15]

2.2 軸向狀態反饋控制器
同理,在設計軸向反饋控制器之前,對方程(3)進行線性化處理得鉆柱起升系統方程

令ω=x,ω2=為狀態變量得
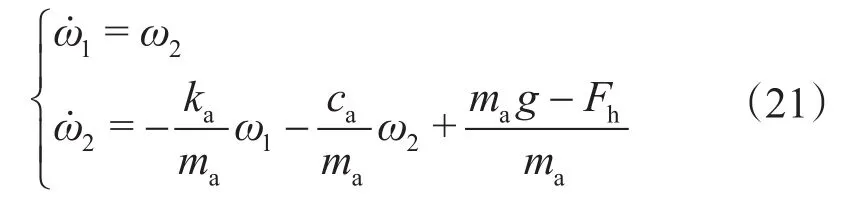
將式(21)寫成向量矩陣形式為

式中,X1為狀態矢量,A1為系數矩陣,B1為輸入矩陣。
為了使鉆柱鉆頭反彈得到控制,同樣可根據LQR控制策略,將大鉤負載的軸向狀態反饋控制器表示為

通過計算得軸向狀態反饋控制增益ρ可表示為

3 結果與分析
表1是鉆柱系統模型的鉆井參數[9]。Matlab/Simulink仿真平臺建立的鉆柱系統模型見圖4。

表1 鉆井相關參數Table 1 Related drilling parameters

圖4 鉆井系統仿真模型Fig. 4 Simulation models of drilling systems
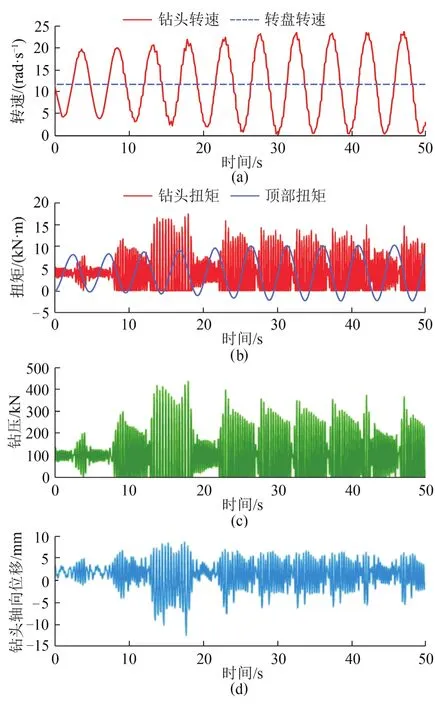
圖5 鉆頭和轉盤的轉速、扭矩、鉆壓以及鉆頭軸向位移響應曲線(kc=50 MN/s,ωd =11.8 rad/s)Fig. 5 Response curve of drill bit with rotary speed, torque,WOB and bit axial displacement (kc=50 MN/s,ωd =11.8 rad/s)
鉆井實踐表明,增大轉盤轉速或減小鉆壓可一定程度減小黏滑振動現象,但同時產生了軸向振動和橫向振動[10-12],且黏滑振動抑制效果不明顯。鉆井現場調研發現,如果鉆柱長時間處在黏滑振動和鉆頭反彈狀態下,鉆井設備就可能會嚴重損壞,最終導致鉆井失敗。為此,必須設計有效的控制器來抑制鉆柱黏滑振動和鉆頭反彈現象。
首先,加入了扭轉狀態反饋控制器后,系統響應曲線如圖6所示,在給定轉盤轉速ωd=11.8 rad/s 、地層剛性系數kc=50 MN/m時,當圖6(a)中仿真時間達到25 s時鉆頭轉速穩定在給定轉盤轉速11.8 rad/s附近,且起初鉆頭轉速波動最高達20 rad/s。在圖6(b)中鉆柱扭矩起初有稍微波動,但10 s后最終穩定在5 kN·m附近,相比較圖5(b)扭矩波動減少了66.7%,鉆柱黏滑振動得到了很大程度抑制。圖6(c)、(d)中,當給定鉆壓F0=100 kN、x0=2 mm時,鉆壓波動起初較大,最終穩定在80~120 kN之間,鉆頭徑向位移波動起初也較大,最終穩定在0.8~3.5 mm之間,故鉆頭反彈現象減小不明顯。
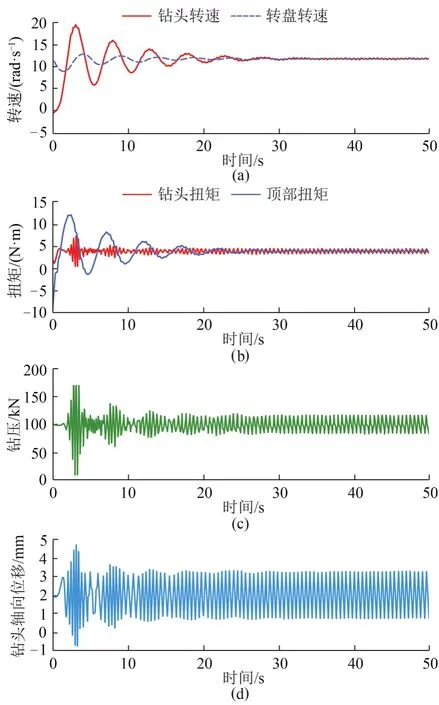
圖6 僅加入扭轉狀態反饋控制器的鉆井系統響應曲線(kc=50 MN/s,ωd =11.8 rad/s)Fig. 6 Response curve of drilling systems only with torsion state feedback controller (kc=50 MN/s,ωd =11.8 rad/s)
在給定參數不變的情況下,針對圖6出現的問題同時加入扭轉和軸向狀態反饋控制器后,系統響應曲線如圖7所示。當仿真時間達到25 s時,圖7(a)、(b)中,鉆頭轉速穩定在給定轉盤轉速11.8 rad/s附近,且鉆柱啟動3 s后扭矩就一直穩定在5 kN·m,同時消除了圖6(b)鉆頭扭矩起初波動大的問題,故表明鉆柱黏滑振動得到了抑制。圖7(c)、(d)中,當給定鉆壓F0=100 kN、x0=2 mm時,鉆壓波動最終穩定在100 kN附近,鉆頭軸向位移波動在1.5~2.5 mm之間,鉆頭反彈現象也得到抑制。
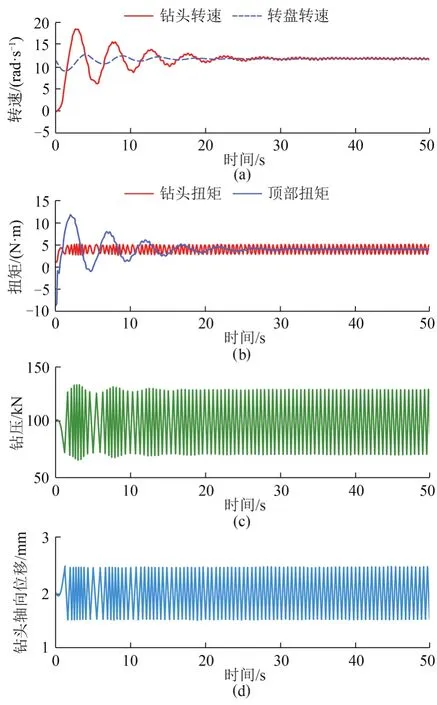
圖7 同時加入扭轉和軸向反饋控制器的鉆柱系統響應曲線(kc=50 MN/m,ωd =11.8 rad/s)Fig. 7 Response curve of drill string systems with both torsion and axial feedback controllers (kc=50 MN/m, ωd =11.8 rad/s)
4 結論
(1)為了同時消除鉆柱黏滑振動和鉆頭反彈問題,相比努爾扎提、Dorf R.C、韓善凱、Omojuwa E等學者的鉆柱旋轉系統模型,本文綜合考慮并建立了鉆柱旋轉系統、起升系統和鉆頭-地層的相互作用模型,使得鉆柱系統模型更加精確、可靠、實用。
(2)采用線性二次性(LQR)控制方法設計的扭轉和軸向狀態反饋控制器,在抑制鉆柱黏滑振動的同時也消除了鉆頭反彈問題。雖然旋轉與軸向狀態反饋控制器的同時加入,使得鉆頭扭矩和鉆壓的響應曲線稍微變寬,但在一定誤差范圍內,該控制器可以有效地抑制鉆柱黏滑振動和鉆頭反彈現象。
(3)此次建模并未考慮到橫向振動問題,因此,下一步將致力于消除3種振動(橫向振動、軸向振動和黏滑振動)的動力學模型及其控制方法的研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2020年2期)2020-06-02 11:29:24
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45