農業機器人移動平臺行進方式綜述
2018-12-19 08:50:40樊正強楊青豐
江蘇農業科學 2018年22期
樊正強, 張 青, 邱 權, 楊青豐
(1.河北農業大學機電工程學院,河北保定 071001; 2.北京農業智能裝備工程技術研究中心/北京市農林科學院,北京 100097)
在農業生產領域,關于移動機器人的研究最早可以追溯到20世紀60年代,但是農業機器人真正得到快速發展卻是在最近幾十年[1]。隨著社會的進步和人們對農產品需求的提高,農業生產已經開始由原來的人力勞動逐漸向自動化和智能化方向轉變,農業移動機器人也因此迅速成為研究熱點[2]。目前關于農業機器人的研究方向主要集中在4個方面:(1)農業機器人本體的研制和穩定性分析;(2)機器人自動導航技術;(3)農業傳感技術與圖像處理;(4)機器人硬件、軟件開發[3-6]。農業機器人的快速發展,能夠在提高農田作業精度和工作效率的同時減少對環境的污染,還能有效避免化肥、農藥與人體的直接接觸,是一種新的可持續發展模式[7-8]。
農業機器人應用領域非常廣泛,按照其功能可分為除草機器人、采摘機器人、搬運機器人、土壤/作物信息采集機器人、收割機器人等[9-10]。與室內或工業機器人相比,農業機器人最大的特點是其主要作業于非結構化環境中并且面對的地形更加復雜[11]。農業機器人在本體研制的過程中須要考慮的問題包括機器人過田壟、行間直線行走、地頭轉向以及在松軟泥濘的田間行進等問題[12],而這些問題與機器人行進方式緊密聯系在一起,因此選擇適當的行進方式可以有效解決機器人田間作業穩定性問題[13]。常見的移動機器人行進方式包括輪式、履帶式、腿式以及復合式等[14]。不同的行進方式對機器人在農田中工作時的穩定性有重要影響[15]。本文對農業機器人的各種行進方式進行了分析。
1 常見的不同行進方式的農業機器人
1.1 輪式農業機器人
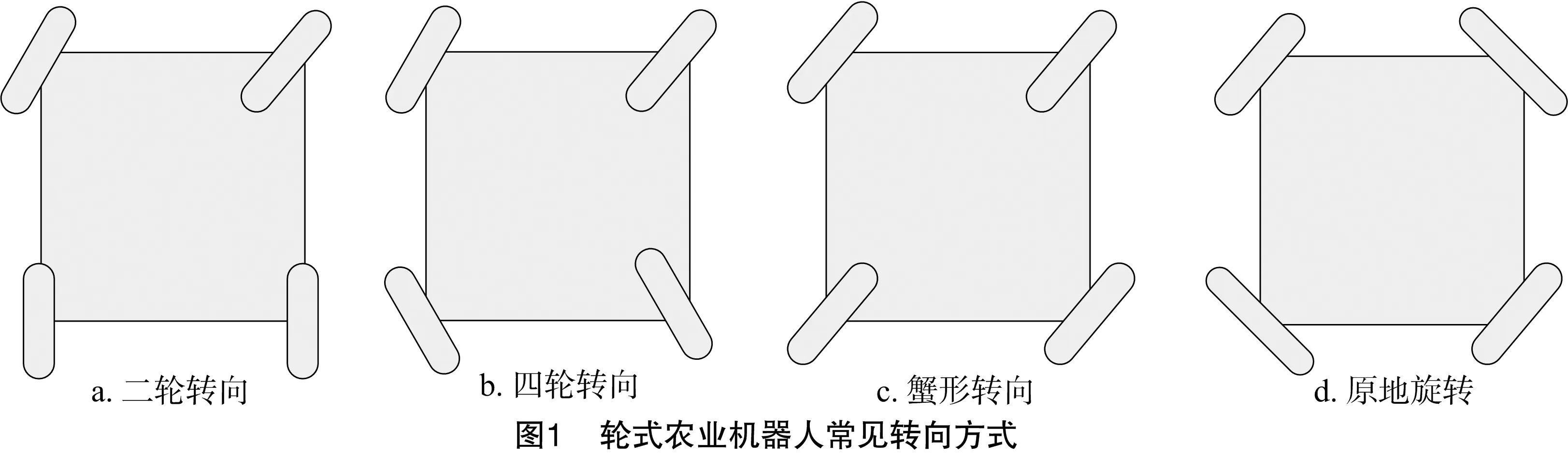
輪式農業機器人因其結構簡單、行走靈活、轉向方式多樣化而受到眾多機器人研究者的青睞,也是目前研究最多的農業機器人,其優點主要包括自身質量輕、占用空間小、承載能力大、驅動和控制方式簡單、行進速度快以及工作效率高等[16];缺點是克服障礙能力有限,例如路面狀況會直接影響其運行穩定性,尤其在復雜的農田環境中作業更須要研究如何精確控制其運動軌跡。輪式農業機器人通常根據實際需要確定輪子的數量,最常見的是輪式農業機器人。關于輪式農業機器人的研究主要集中在轉向控制問題上[17],通常按照機械結構將其轉向方式概括為3種:鉸接式轉向、差速轉向和車輪轉向。車輪轉向主要包括二輪轉向、四輪轉向、蟹形轉向和原地旋轉4種轉向控制方式[18]。圖1顯示了輪式農業機器人常用轉向控制方式。一般情況下,二輪轉向和四輪轉向符合阿克曼轉向定理[19],它們在轉向時會圍繞一個圓心點作純滾動圓周運動。當二輪轉向和四輪轉向內外側車輪轉過的角度相等時,四輪轉向相對于二輪轉向的轉彎半徑減小了1/2。蟹形轉向可以實現機器人的側向運動,甚至橫向運動。原地旋轉正好和蟹形轉向相反,可以在不改變機器人當前位置的情況下實現零半徑轉向。關于輪式農業機器人的例子比較多,如美國華盛頓州立大學張勤團隊的bin-dog果園搬運機器人[20]、巴西圣保羅大學研發的Agribot農業機器人平臺[21]以及國內由中國農業大學研發的作業目標信息獲取農業機器人[22]、華南農業大學研發的電動輪式機器人[23]、中國農業機械化科學研究院和中國農業大學研發的農用輪式機器人平臺等[24]。一些典型的輪式農業機器人如圖2所示。

1.2 履帶式農業機器人
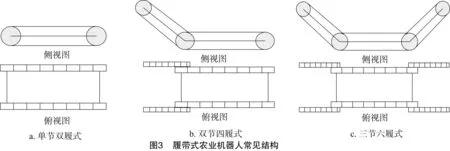
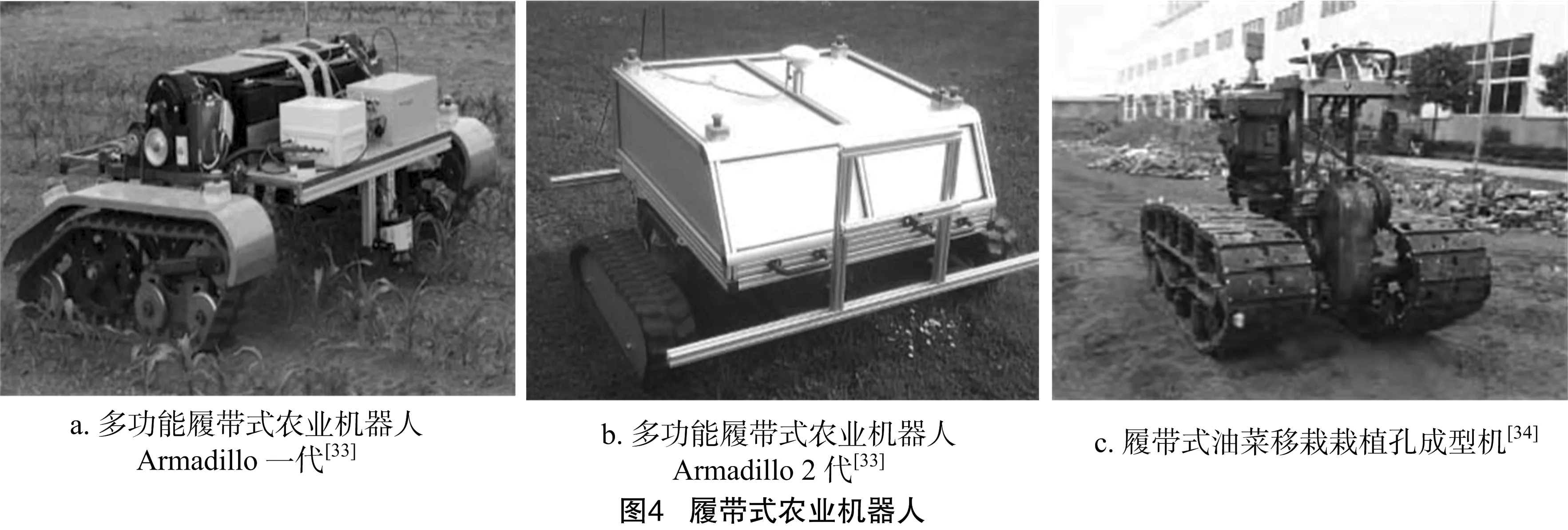
履帶式農業機器人結構種類較多,常見的可分為帶履帶臂和不帶履帶臂2種,帶履帶臂的又被稱為履腿復合式機器人[25-26]。通常履帶式機器人可以根據其自身結構分為單節雙履式、雙節四履式以及多節多履式[27]。圖3顯示了履帶式農業機器人的常見結構,其中,圖3-b和圖3-c帶有履帶臂,相比圖3-a有更好的越野性能,在農田中工作時,可以根據地形的需要決定履帶臂的高度,從而順利通過障礙物。履帶式農業機器人的優點包括:結構緊湊,負重能力強;與地面的接觸面積大,下陷深度低,適合在松軟或者泥濘的農田作業;由于履帶式機器人通常采用差速方式轉向,因此可以實現零半徑轉彎,降低了對空間的要求[28];履帶式機器人越野性能強,可以有效解決過田壟和跨越障礙物的問題[29]。履帶式農業機器人也有一些缺點,主要包括:移動速度慢;消耗能量大;行駛機構容易磨損,對履帶的材質和構型要求高;其本身的質量大,導致與地面摩擦阻力過大,因此在松軟土地上轉向時,容易對平整的農田造成不必要的損壞,甚至會對農作物造成傷害。一些關于履帶式農業機器人的研究在文獻[30-34]中給出,其中分別介紹了采用履帶式結構的自動可視除草機器人、農用仿形履帶機器人、開放式農業機器人移動平臺、集田間除草與信息采集為一體的多功能履帶式農業機器人Armadillo以及履帶式油菜移栽栽植孔成型機。一些典型的履帶式農業機器人如圖4所示。
1.3 腿式農業機器人
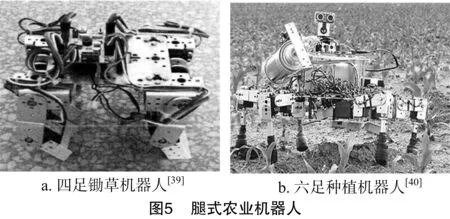
與輪式或者履帶式農業機器人相比,腿式農業機器人最大的特點是其運動軌跡由一系列離散的點組成[35],這也造就了其能夠適應更復雜的地形環境,不用太多考慮地面的平整度,因此跨溝壑、過田壟和梯田作業成為其強項。又因為腿式農業機器人與地面形成點與點的接觸,因此不會對農田造成較大的破壞。腿式農業機器人的自身缺點也非常明顯,首先腿式機器人能量消耗高,工作效率低;其次由于其本體腿關節處的自由度過高,導致其腿部的協調性難以控制,因此控制算法對其工作時的穩定性有重要影響[36];另外腿式農業機器人有相對較小的負重能力,不宜搭載過重的傳感器或操作裝置[37]。正是由于腿式農業機器人的這些缺點,因此研究者對純腿式的農業機器人研究比較少,而更傾向于研究輪腿、履腿等復合式機器人,這樣既能發揮腿式農業機器人的優點,又可以避免純腿式農業機器人在控制方面的難度,增強了其運行穩定性,同時也可以適應更多的地形。從現有文獻看,目前對于腿式機器人的研究主要集中在雙腿、四腿、六腿結構上[38]。文獻[39-40]中介紹了四腿式和六腿式農業機器人,其中分別介紹了四足鋤草機器人和多機器人協調合作的六足種植機器人(http://dorhoutrd.com),這2種機器人如圖5所示。
1.4 復合式農業機器人
復合式機器人包括輪履復合式、輪腿復合式、履腿復合式以及輪履腿復合式等[41]。用于農業方面的復合式機器人通常由能夠適應非結構化環境的多用途機器人改裝而成,相關研究在文獻[42-44]中給出,其中分別介紹了輪履式農業機器人越障控制方法、適應于非結構環境的多功能輪腿復合式機器人和由中國科學技術大學研發的新型六輪腿機器人。圖6是多功能輪腿復合式機器人和新型六輪腿機器人。復合式農業機器人可以避免單一行走結構機器人的一些弊端,人們可以根據農田環境的要求選擇適合地形的復合式結構[45]。當在復雜農田環境中行走同時又對速度和效率要求不高的情況下可以選擇履腿復合式結構; 當農田土地比較松軟又對速度和效率要求比較高時,可以采用輪履復合式結構;當地面溝壑、田壟過多或者在梯田作業同時又對效率要求高時,可以考慮輪腿復合式結構;當地面非常特殊,要求機器人可以適應各種復雜環境時,可以考慮輪履腿復合式結構,但是這種結構過于復雜,目前對這方面研究較少。復合式農業機器人的優點是對各種地形都做了充分的考慮,可以滿足較大難度的作業需求,但其缺點也很明顯,其機械結構過于復雜,控制機器人行走時考慮的因素較多,面對復雜地形選擇適當行進方式的控制算法較復雜。混合式農業機器人并非可以繼承各類單一行進方式機器人的全部優點,正如文獻[15]中提到的,由于混合式行進方式相比其他行進方式的機器人機械結構更加復雜,往往導致混合式結構在行走時會削弱單一行進方式的一些優點,但同時又會綜合各行進方式的部分優點。因此,復合式機器人一般用于特定場合的農田環境中作業。

1.5 農業機器人各種行進方式比較
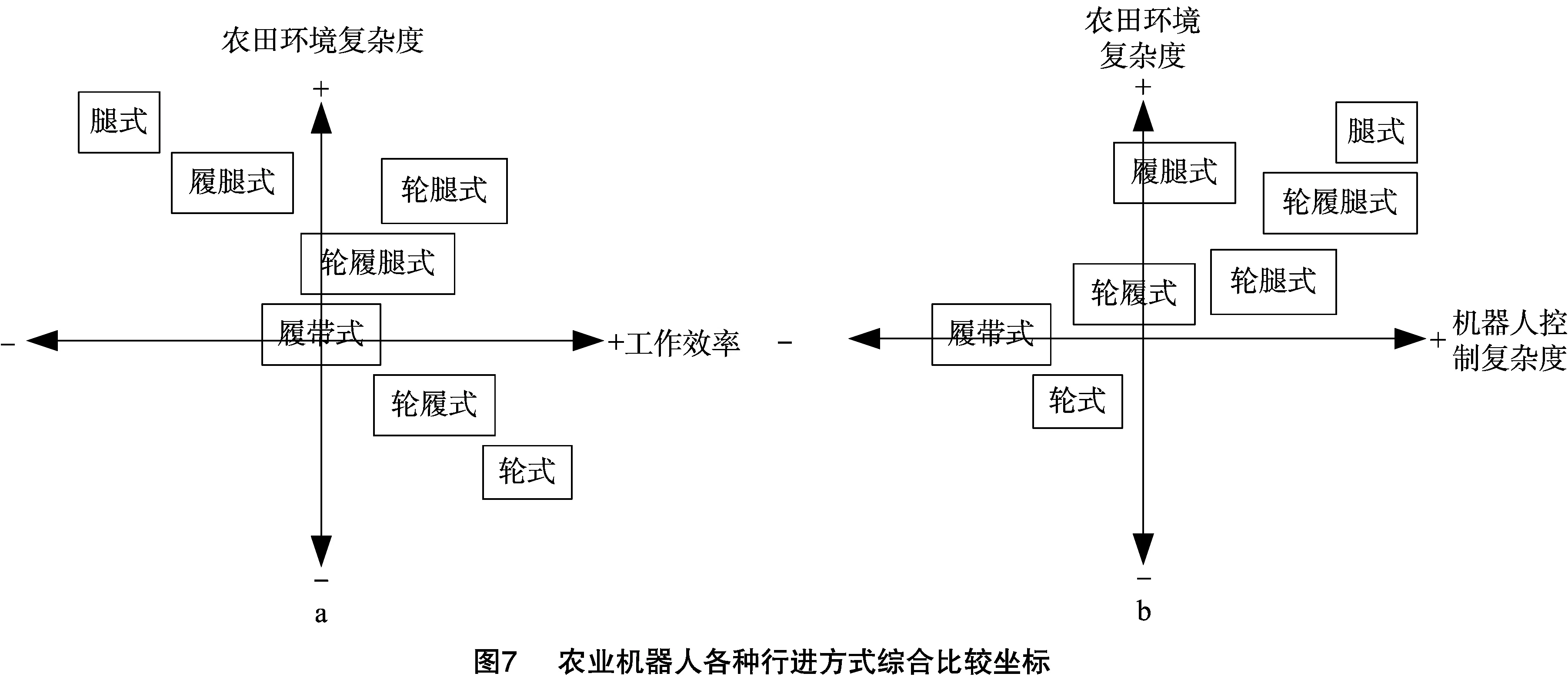
根據前述內容將農業機器人各種行進方式的一些主要特性做成表格進行比較,如表1所示。從表1中可以看出,在能源利用率方面,輪式消耗能源最少,腿式最多,履帶式居中;作業效率方面,輪式作業效率最高,腿式最低,履帶式居中;跨越障礙方面,輪式越障能力最弱,腿式最強,履帶式居中;控制復雜度方面,履帶式最容易,腿式最難,輪式居中[46]。而復合式結構的機器人結合了各種行進方式的優缺點。圖7是根據表1作出的農業機器人各種行進方式綜合比較坐標圖,圖7-a、圖7-b分別以農田環境復雜度和工作效率以及農田環境復雜度和機器人控制復雜度為坐標軸對各種行進方式進行了對比。綜合各方面因素可知,無論在能源利用率、作業效率還是控制方面,輪式和履帶式技術都比較成熟,實用能力更強;而腿式和復合式結構雖然越障能力極強,但是在技術方面遠低于輪式和履帶式行進方式,同時由于它們工作效率較低,因此更適合通過多機器人協調控制來完成作業任務。
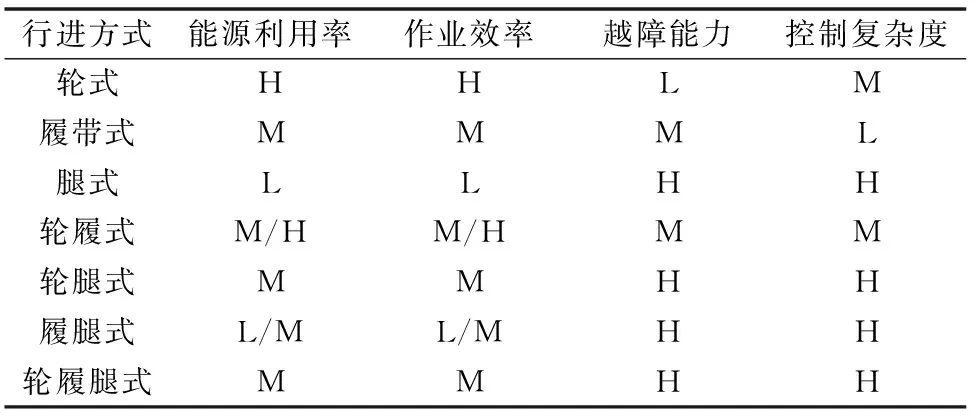
表1 農業機器人各種行進方式綜合比較
注:L(low)表示低,M(medium)表示中,H(high)表示高。
2 存在的問題
就目前來看,農業機器人移動平臺研究雖然已經取得了很大進展,但是根據研究現狀可以發現,目前對農業機器人的研究主要集中在輪式和履帶式相關結構上,而對腿式和復合式結構研究較少[47],其主要包括兩方面原因:首先從硬件角度看,雖然很多高精度傳感器技術已經成熟,但是這些傳感器大部分都是通用型的,對于應用在農業機器人領域的專用傳感器研究較少;其次是算法方面,在腿式結構機器人研究中涉及自由度過高、控制復雜等問題,如何找到一種合適的算法實現對腿式或者混合式機器人的精確控制仍然有待研究[48]。即使較簡單的輪式或履帶式機器人目前也沒有大面積用于農業生產,還主要集中在研發和試驗階段。關于農業機器人的推廣要解決3個問題:(1)電池的續航問題,保證機器人持續作業;(2)成本問題,只有控制好成本才有市場可言;(3)智能問題,面對普通農民必須開發出操作簡單、工作穩定的農業機器人[49]。
3 結論與展望
本文綜述了農業機器人移動平臺常見的行進方式。農業機器人常見行進方式包括輪式、腿式、履帶式和復合式,復合式機器人又包含了輪腿、履腿、輪履和輪履腿4種結構,總共3種單一行進方式、4種復合式行進方式。根據各種行進方式的特點,對它們所能適應的農田環境進行了分析:輪式和履帶式雖然相對于帶腿式結構的機器人對復雜環境的適應能力較弱,但是由于它們工作效率相對較高、控制簡單,可以完成大部分農田環境作業,是目前研究最多的農業機器人;腿式和混合式結構機器人,盡管可以適應更復雜的環境,但是它們工作效率比較低并且控制復雜,因此研究相對較少,目前它們主要用于特定場合的農田環境。
農業機器人在社會上發揮越來越重要的作用,并逐漸成為現代農業智能化水平的標志之一[50]。為了更好地適應農田環境作業,未來應該更加關注腿式和混合式農業機器人的發展,尤其是腿式機器人作為仿生機器人的一種,始終是一道難題,在農業方面的應用更是少之又少,須要加大對其研究力度促進農業機器人行業的迅速發展;同時也要推廣輪式和履帶式農業機器人的實際應用能力,早日實現農業機器人的規模化和市場化,為我國智慧農業的發展開辟新的道路。
猜你喜歡
今日農業(2022年1期)2022-11-16 21:20:05
今日農業(2022年3期)2022-11-16 13:13:50
今日農業(2022年2期)2022-11-16 12:29:47
今日農業(2021年14期)2021-11-25 23:57:29
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
故事大王(2016年7期)2016-09-22 17:30:08
