基于智能控制器的AGV集成控制與智能化研究
2018-12-11 03:13:00高飛
設備管理與維修 2018年19期
高 飛
(承德市交通運輸局通信管理處,河北承德 067070)
0 引言
AGV(Automated Guided Vehicle,自動引導車)作為一種具備自動化無人駕駛特征的智能化搬運設備,屬于一種移動式機器人[1],能夠按照預設的路徑行駛,并配合載物臺完成物料搬運工作及裝配。AGV具備工作靈活、高效、智能化等顯著特點,非常便于生產制造系統的柔性重組,實現生產過程物料的柔性化搬運,已成為智能制造及現代物流自動化系統不可缺少的關鍵設備之一[2]。它以電池為動力,以工業控制器或工控機為核心進行自主式導引,并可根據實際需要配備不同的移載機構,以完成相應的操作任務[3],AGV屬于典型的輪式智能AGV范疇,智能AGV根據移動方式的不同,可分為足式移動、輪式移動、履帶式移動、爬行及蛇形移動等5大類[4]。
隨著智能制造及工業4.0的發展,AGV作為聯系和調節離散型物料管理系統使其作業連續化的必要自動化搬運裝卸設備,其應用范圍和技術水平得到了迅猛的發展[5]。AGV將朝著3個方向發展:淤智能化。AGV通過搭載智能控制系統,強化AGV的智能運算功能,使之能夠與企業的各類信息系統,如MES(Manufacturing Execution System,制造執行系統)、智能倉儲、PLS(Production Line System,生產線系統)等實現無縫融合,打造全柔性、高度自動化的現代化企業制造加工及物流系統[6]。于集成化。AGV作為智能AGV的一個分支領域,未來發展應進行集成化,利用AGV移動的優勢,搭載各類機械手,實現物料搬運、零部件裝配甚至柔性制造加工單元[7]。AGV控制系統向開放型控制器方向發展[8],便于標準化、網絡化,系統集成度提高,提高兼容性、擴展性和操作性。同時,AGV小車的智能傳感器集成開發將所有突破,除采集位置、速度、加速度等傳統信息,還應用機器視覺、力反饋等多傳感器的融合技術來決策控制[9]。盂重載化,AGV目前主要應用定位于市內,而室外AGV技術一直是應用的難點,比如港口自動智能碼頭,不但需要AGV在比較惡劣的環境下正常運行,還需要滿足搬運60 t集裝箱的需求[10]。
本文針對未來AGV控制器的集成化和智能化發展趨勢,開發專用于兩輪差速驅動AGV的開放式集成控制器。核心芯片采用三星公司基于ARM Cortex-A9內核設計的S5P4418,主頻1.4 GHz。控制器集成了伺服驅動電機控制接口、慣性導航、編碼器、串口、以太網(含無線)、藍牙、I/O,ADC(Analog-to-Digital Converter,模擬數字轉換引腳)、串口及視覺傳感器等各類外圍控制與通信接口,實現了一塊智能控制硬件集成AGV控制器所需的全部功能。同時為降低各種智能算法和數據交互接口的開發難度,移植了嵌入式linux操作系統,便于快速開發各類AGV集成控制系統。
1 智能AGV控制器硬件架構與設計
隨著機器人技術的不斷進步,AGV的智能性不斷提高,對其控制系統的要求也越來越高。傳統AGV的控制系統通常以80C51,AVR(單片機類型)等單片機或PLC為核心構成,其具有處理能力及外設支持類型有限、難以實現復雜的控制算法等缺陷[11]。集成控制器核心芯片采用三星公司基于ARM Cortex-A9內核設計的S5P4418,主頻1.4 GHz,主要實現邏輯控制、數據運算、通信控制等[12]。根據AGV的發展趨勢,設計智能AGV硬件組成結構,如圖1所示。
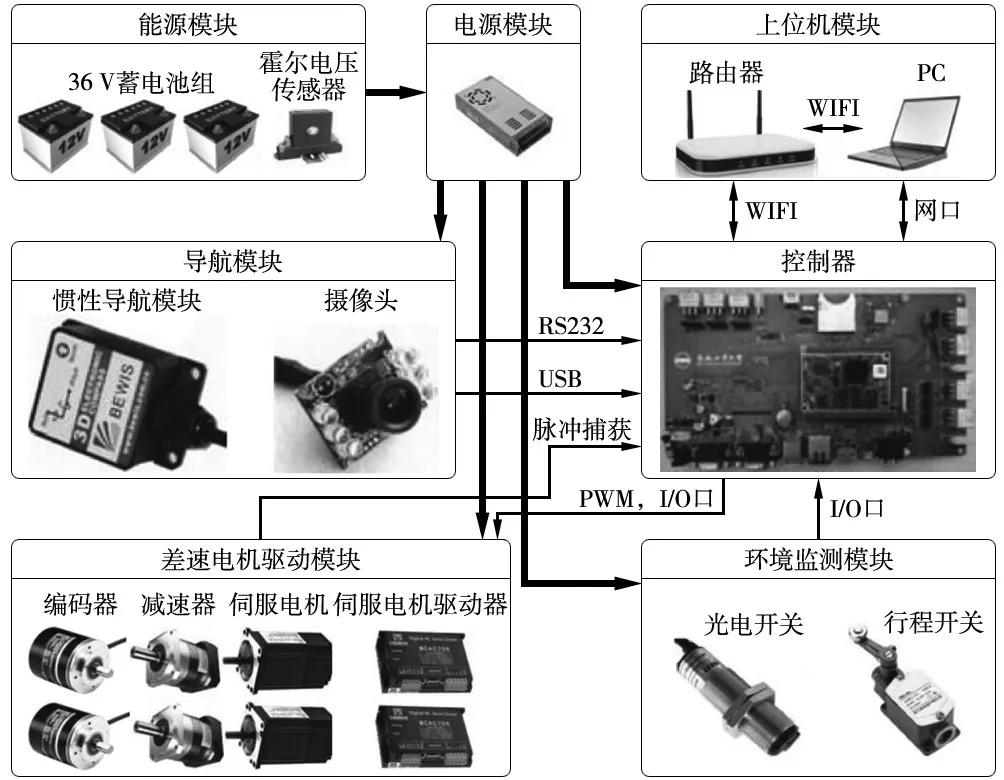
圖1 AGV硬件組成架構
智能AGV車體搭載36V蓄電池組,具有較高的可靠性、環境適應性;采用雙電機差速驅動形式,提高靈活性,降低對環境的范圍要求;采用TCP/IP通信方式[13],通過有線或無線網的方式與外界上位機組成局域網進行數據及指令交互,實現網絡控制。智能AGV控制器獲取慣性導航及攝像頭圖像數據,結合編碼器輪速信息計算后,對AGV進行橫、縱向及角度控制。同時,智能AGV通過光電傳感器[14]與行程開關[15]感知環境,能夠進行有效避障。蓄電池組裝有霍爾電壓傳感器,使得智能AGV能夠獲得自身電量信息,在低電量時自動回充。
綜合AGV硬件組成架構,考慮一定的設計冗余,集成控制器包含以下硬件及接口資源:6個光電傳感器,12 V供電;6個行程開關傳感器,5 V供電;2個慣性導航傳感器,5 V供電;2個輪速光電編碼器,12 V供電;2個攝像頭(視覺傳感器接口),12 V供電;3路伺服電機控制接口,兼容市面上大部分伺服電機驅動器與步進電機驅動器;10 M/100 M以太網(含無線);6路模擬電壓讀取接口。集成控制器硬件資源及接口如圖2所示。
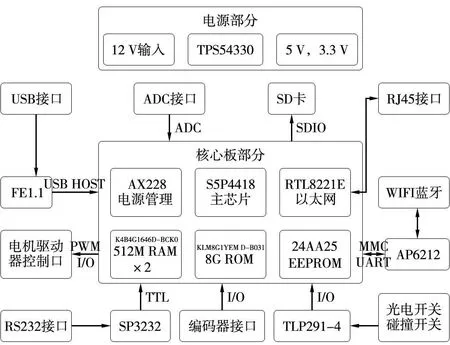
圖2 集成控制器硬件資源及接口
2 AGV運動學模型的建立
首先對AGV及其工作環境進行假設:行駛路面為一平面,且在行駛過程中車輪及車體不發生形變;兩驅動輪作純滾動,橫縱向均不發生側滑、偏移;在負載和空載兩種情況下車體的輪距、軸距等機械結構參數均不發生變化。
AGV在行駛過程中的位姿是對AGV進行控制的基礎,位姿是指在絕對坐標系中智能AGV的位置和姿態。智能AGV的位姿信息用位姿矩陣P=[x,y,茲]T表示,其中x表示AGV相對于絕對坐標系原點X軸方向的距離,y表示AGV相對于絕對坐標系原點Y軸方向的距離,茲表示左右車輪連線的中垂線與Y軸的夾角,如圖 3所示,其中,R,Rl和 Rr分別代表AGV中線、左輪和右輪到路徑軌跡圓心的距離。
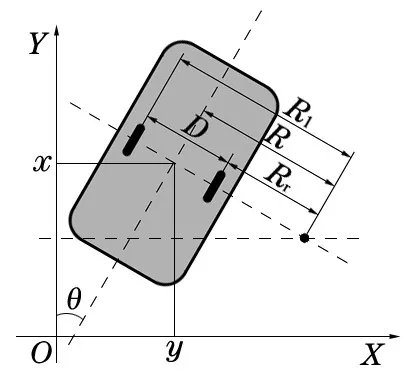
圖3 AGV運動學示意
本文研究的是差速輪式AGV,從運動特性分析建立位姿矩陣與左右輪速度間的關系。建立準確的運動學模型是進行導航控制算法設計的基礎,如圖1所示為本文設計的智能AGV運動學模型,假設t時刻AGV差速運動,右輪速度vr約左輪速度vl,左右輪的行駛軌跡均為圓弧,AGV右轉,質心速度為v,在駐T時間間隔內,轉過角度駐茲為:

式中,D為兩輪間距,R為行駛路徑軌跡圓半徑。

AGV在X,Y方向的速度分量以及駐T時間間隔內橫擺加速度(定義逆時針方向為正方向)為:
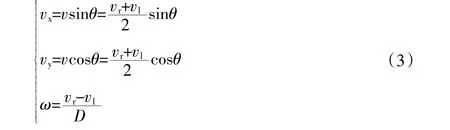
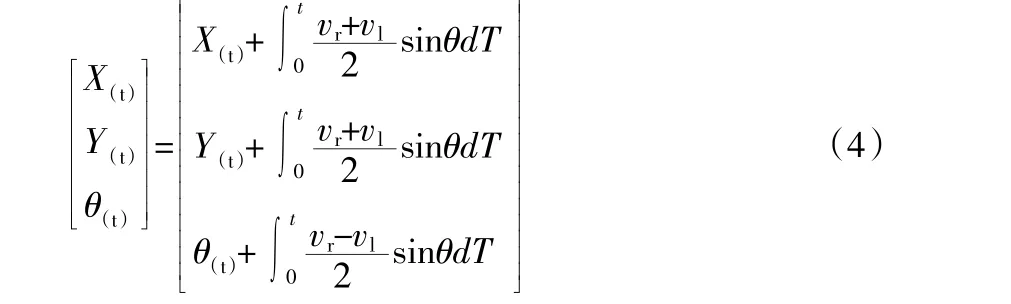
規定初始位姿 P=[x,y,茲]T=P=[x0,y0,茲0]T,得到任意時刻位姿矩陣與左右輪速間的關系。
3 導航控制系統算法設計
3.1 慣性、視覺聯合導航方法設計
在智能AGV的行駛路徑中每隔特定距離駐d處放置一個帶有位置信息的二維碼,構建導航柵格地圖,視覺傳感器對二維碼進行掃描并提取出二維碼中的位置信息以及在此時智能AGV相對于該位置的縱、側向及角度偏差。利用離散的二維碼位置信息消除慣性導航[16]的積累誤差。圖4所示二維碼經過掃描后獲取的信息為0010001100500060003,圖 5為對二維碼信息的解讀。
3.2 控制方法設計

圖4 輔助導航用二維碼
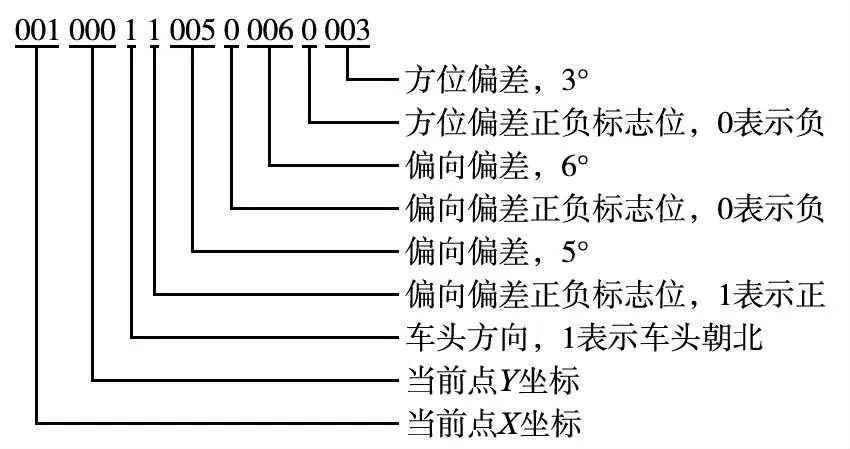
圖5 二維碼信息解讀
結合AGV的運動學模型,通過縱向偏差控制得出控制速度vc,側向偏差控制得出期望橫擺角速度棕r,進一步計算得到AGV左右輪控制轉速,實現對AGV運動軌跡的控制,如圖6所示。
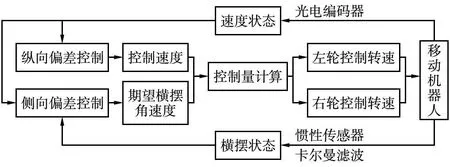
圖6 智能AGV速度控制流程
AGV的側向偏差控制采用PID控制算法,通過對兩輪差速驅動以達到對車體橫擺狀態的控制。對AGV的縱向偏差采用一個閉環的控制回路進行控制,使AGV在起步和停止時呈現一個平滑的加減速過程,根據當前速度、目標速度以及縱向偏差距離來實時計算其在當前速度情況下縱向偏差距離內達到目標速度所需加速度大小,以該加速度大小為依據對速度進行控制。
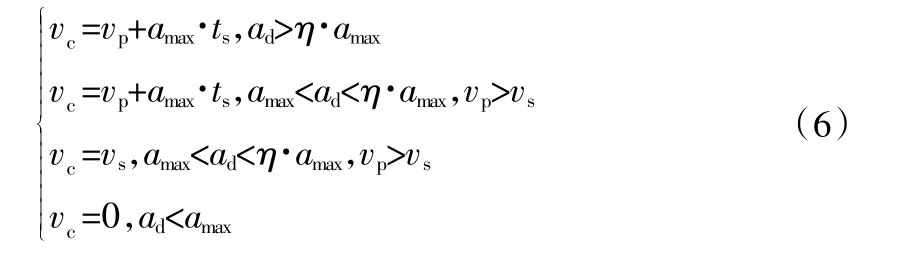
在當前狀態下(當前速度和當前縱向偏差)達到目標速度所需加速度為:

其中,vp為智能AGV的當前速度,vt為智能AGV的目標速度,Dl0為縱向偏差距離。計算得到ad后將其與最大加速度amax、安全系數濁和最大加速度amax的乘積進行比較,得出在各種情況下的控制速度vc。
如圖7所示,0~t1時,以最大加速度進行加速行駛,t1~t2時為勻速行駛,t2~t3時以最大加速度進行減速行駛,在t3時刻速度減為vs時,保持勻速行駛,當視覺傳感器采集到二維碼數據時(t4)進行減速直到停止(t5),縱向偏差控制過程充分體現了復合導航的思想,兩種導航方式進行切換,使控制更加精確。
4 導航控制算法仿真及實車試驗
將上述設計的導航控制算法在Matlab/Simulink中建立運動仿真模型,進行仿真。并將導航控制算法移植至智能AGV控制器,在搭建好的智能AGV測試平臺(圖8)上進行實車試驗,智能AGV的基本參數信息見表1。
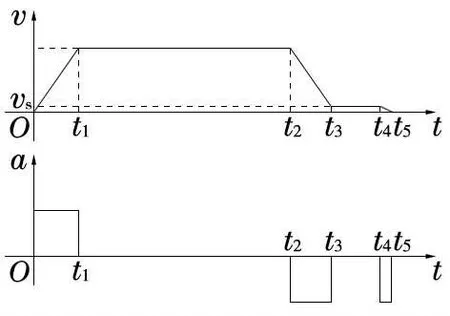
圖7 縱向控制方法效果
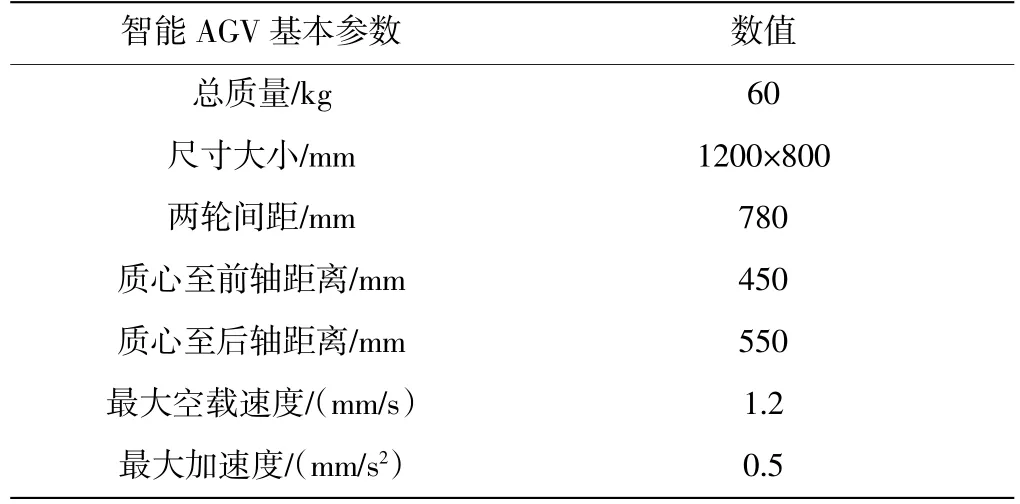
表1 智能AGV的基本參數
在仿真時和試驗時設定相同的初始偏差,圖9和圖10分別為直線、圓弧形式的仿真及試驗軌跡曲線。綜合圖9和圖10可知,試驗與仿真的誤差控制在一個較小的范圍內,導航控制算法移植到智能AGV集成控制器能夠很好的達到預期的控制效果。在直線行駛過程中智能AGV會根據給定的初始偏差進行調整,最終將誤差控制在一個很小的范圍內,效果明顯,車身的抖動小,調整平緩,可靠。在進行圓弧運動時,行駛一個圓圈后智能AGV能夠回到起始點位置,這也是高精度控制的直接體現。
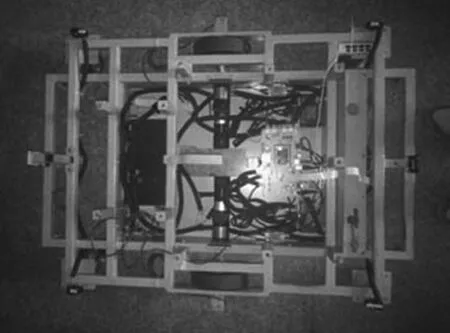
圖8 智能AGV測試平臺
5 結論
針對未來AGV將朝著“智能化、集成化、重載化和模塊化”方向發展的趨勢,研究設計基于ARM Cortex-A9處理器的AGV集成控制器,不僅提高了AGV控制系統的硬件設計可靠性,降低了AGV控制器的設計成本,還大幅提高了AGV的集成化和智能化水平。本文設計的集成控制器能在高速移動中快速做出各類控制參數響應,實現縱向控制誤差10 mm,側向誤差8 mm,角度偏差1°,為研究設計高集成度和智能化AGV提供了較好的工程技術支撐。
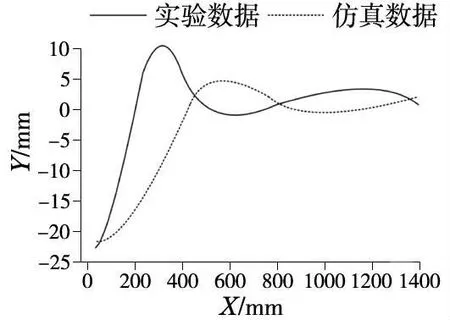
圖9 直線、圓弧行駛仿真
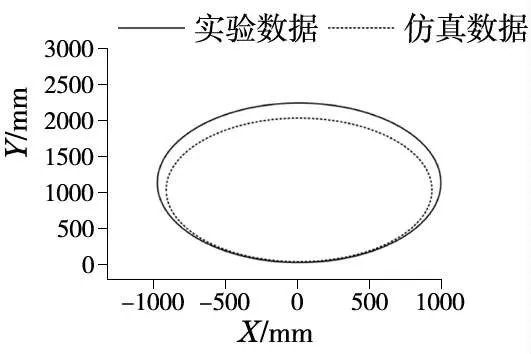
圖10 試驗軌跡曲線
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
