無人水面艇收放技術(shù)發(fā)展趨勢探討
2018-12-05 08:52:00張曉東劉世亮劉宇胡曉芳高超
中國艦船研究 2018年6期
關(guān)鍵詞:系統(tǒng)
張曉東,劉世亮,劉宇,胡曉芳,高超
1 海軍工程大學(xué) 艦船與海洋學(xué)院,湖北 武漢 430033
2 中國艦船研究設(shè)計中心,湖北 武漢 430064
0 引 言
隨著科學(xué)技術(shù)的迅速發(fā)展和對無人系統(tǒng)認識的不斷深入,無人水面艇(USV)在導(dǎo)航、巡邏、探測、搜救、反潛戰(zhàn)、反艦戰(zhàn)、電子戰(zhàn)、海上攔截、水雷對抗等領(lǐng)域的應(yīng)用潛力日漸凸顯[1-2]。各國不斷加大對USV的研發(fā)力度,使其進入了一個快速的發(fā)展階段[3]。然而,與USV相匹配的布放回收(以下稱“收放”)技術(shù)卻處于相對滯后的狀態(tài)。在實際應(yīng)用中,USV收放過程的自動化程度越高,進入工作狀態(tài)越快,其任務(wù)執(zhí)行的成功率就越能得到保證,而母船攜帶更多USV參與任務(wù)就更有意義。從此發(fā)展趨勢看,應(yīng)加強對USV收放技術(shù)發(fā)展方向的分析研究,以便能準(zhǔn)確把握未來USV收放技術(shù)發(fā)展的核心方向,為開展具體研究奠定基礎(chǔ)。
目前,小艇收放裝置操作需要有人負責(zé)駕駛小艇及解掛鉤等輔助操作,難以適應(yīng)艦船處于高航速、高海況時的需求,這不僅將耗費大量的時間,而且還增加了人員操作時的危險性。因采用的是無人隨艇航行方式,故現(xiàn)有成熟的載人小艇收放裝置不能直接應(yīng)用于USV收放過程[4-5]。在USV收放技術(shù)方面,國內(nèi)外尚未形成統(tǒng)一的認識,現(xiàn)有收放裝置雖然各具特色,但未出現(xiàn)性能特別突出的類型。因此,本文將結(jié)合國內(nèi)外發(fā)展現(xiàn)狀,充分調(diào)研現(xiàn)有載人小艇收放技術(shù),在此基礎(chǔ)上,提出安全可靠、迅速高效、能夠適應(yīng)更高航速和海況且自主化程度更高的USV收放技術(shù)。
1 國內(nèi)外研究現(xiàn)狀
USV收放技術(shù)是將其快速、安全地部署到水面并高效、可靠地回收到母船的技術(shù)。國外早在上世紀(jì)就開始了USV收放技術(shù)的可靠性和安全性研究,現(xiàn)階段,各國對該技術(shù)更加重視。從國內(nèi)外USV收放技術(shù)的發(fā)展現(xiàn)狀來看,主要研究方向包括吊放式收放技術(shù)、艉滑道式收放技術(shù)和塢艙式快速收放技術(shù)。表1和表2所示為當(dāng)前國內(nèi)外USV收放技術(shù)的研究現(xiàn)狀。美國在該領(lǐng)域處于領(lǐng)先地位,在適應(yīng)海況、航速等方面均比國內(nèi)領(lǐng)先[6]。
1.1 吊放式收放技術(shù)
吊放式收放技術(shù)廣泛應(yīng)用于各種艦艇、民用船舶和其他特種船舶中,其技術(shù)已相對成熟。吊放式收放技術(shù)包括單吊點和雙吊點兩種。單吊點技術(shù)一般適用于長度不超過7.5 m的小艇,因其可靠性高、操作簡單,日益受到重視;雙吊點技術(shù)起吊小艇時穩(wěn)定性更好,但操作困難,危險性高,更適合長度超過7.5 m的小艇[7-8]。國外大型艦船上最常采用3種吊放式收放裝置,包括回轉(zhuǎn)式、A架式和伸縮式[9],如表1所示。其中,德國Global Davit公司開發(fā)的吊艇架式工作艇收放系統(tǒng)[10]為典型的回轉(zhuǎn)式系統(tǒng),該系統(tǒng)由絞車、離心制動器和防護等級為IP56的電動機等組成,適用于重量為15~36 kN的USV,如圖1(a)所示;美國5G海洋國際公司基于母船上現(xiàn)有的吊艇架,正在研究浮動托架式吊放技術(shù),該收放系統(tǒng)的未來設(shè)計方向是成為一種集自動收放、海上補給于一體,適應(yīng)多種無人系統(tǒng)、多任務(wù)需求的綜合服務(wù)平臺[11-12];挪威Vest Davit公司研制的HN型雙吊點吊艇架[13]為典型的A架式收放系統(tǒng),其收放裝置的吊鉤距離可調(diào),并設(shè)計有獨立的波浪補償系統(tǒng)和自動調(diào)平雙卷揚系統(tǒng),如圖1(b)所示;此外,Vest Davit公司還開發(fā)出了伸縮式TDB型吊艇架[14],該吊艇架配置有自主研制的動態(tài)減震器,提供了可供選擇的波浪補償絞車、拉索器、限位開關(guān)和遙控器,并有液壓和全電動2種型號,如圖1(c)所示。國內(nèi)吊放式USV收放技術(shù)研究起步較晚,典型的研究項目有上海大學(xué)設(shè)計的托架配合吊艇架收放裝置,該裝置主要是在現(xiàn)有載人艇吊放式收放裝置的基礎(chǔ)上開展研究,使其能適用于USV收放作業(yè)。
吊放式收放技術(shù)按照吊放位置分為舷側(cè)吊放和艉部吊放2種方式。如圖1(a)、圖1(b)和圖1(c)所示,舷側(cè)吊放技術(shù)需要在母船舷側(cè)設(shè)置吊艇架、小艇存放架(如需要)、艏部牽引索等裝置[15-16],并需要登艇設(shè)備以便于人員登上USV完成輔助掛鉤操作等。該收放設(shè)備既可設(shè)置在艙內(nèi),也可設(shè)置在露天部位。圖1(d)所示為美國“獨立”號瀕海戰(zhàn)斗艦艉部伸縮臂式收放系統(tǒng)[17],該系統(tǒng)在伸縮吊臂下方設(shè)置了具有多個吊點的浮動托架。在回收時,USV駛?cè)敫油屑埽瑢渔i定裝置將二者固定,然后跟隨浮動托架一同吊起;在投放時,USV跟隨浮動托架放入水中,由對接鎖定裝置釋放,然后倒航駛出。采取該方式收放作業(yè)需要人工輔助遙控操作USV駛?cè)敫油屑埽辗旁O(shè)備設(shè)置在艙內(nèi),并用艉門遮擋存放。

表1 典型的吊放式收放技術(shù)Table 1 Typical launch and recovery technologies of davit
1.2 艉滑道式收放技術(shù)
艉部滑道收放技術(shù)主要應(yīng)用在各種艦艇、公務(wù)船和外貿(mào)船上,包括單滑道系統(tǒng)和雙滑道系統(tǒng)[18-21],如表2所示。早在1997年,美國“海上貓頭鷹”USV就完成了滑道式收放的工程應(yīng)用方案。為配合瀕海戰(zhàn)斗艦的作戰(zhàn)使命,該技術(shù)被廣泛應(yīng)用于掃雷載具領(lǐng)域。美國物理科學(xué)公司開發(fā)了一種通用型艉滑道收放系統(tǒng)[19],可在母船航速為15~20 kn時實現(xiàn)載人艇、USV和無人水下機器人(UUV)的收放操作。該系統(tǒng)的傳送滑道安裝有可展開、大間隔的彈性皮帶,既可在母船艉部水下工作時有效降低阻力,也可讓USV在彈性皮帶上柔性登船。荷蘭Marine Systems公司與德國Global Davit公司合作研制了一種新型艉滑道收放系統(tǒng)[20],該系統(tǒng)主要包括控制單元、起落架式坡道和拖曳體,可在4級海況下實現(xiàn)USV的安全收放,如圖2(a)所示。法國研制的OPV90近海巡邏艦[21]為艉部雙滑道式系統(tǒng)的典型應(yīng)用案例,如圖2(b)所示。目前,國內(nèi)艉滑道式載人小艇收放技術(shù)較為成熟[22],并已形成單滑道系統(tǒng)、雙滑道系統(tǒng)等不同系列設(shè)計。然而,為滿足USV的發(fā)展趨勢和吊放需求,還需在此基礎(chǔ)上開發(fā)出適合USV的艉部滑道收放技術(shù)。
艉滑道式收放技術(shù)通過滑道系統(tǒng)實現(xiàn)USV的收放作業(yè)。在回收時,USV將選擇合適的沖排時機,并以高于母船的航速沖入艉部滑道,由滑道前方的阻攔索與艇艏掛鉤機構(gòu)自動掛接,阻攔緩沖機構(gòu)則吸收USV沖排時的動能,讓其在短距離內(nèi)受到阻攔而停止,從而實現(xiàn)USV的回收。在釋放時,USV的電控機構(gòu)自動打開掛鉤,此時艇艏與阻攔索分離,USV依靠自重下滑至水面。若外部風(fēng)浪較大,此時可采用阻攔張緊裝置將USV推送至距水面較近的位置,然后由其自由下滑[23]。該收放形式需人工輔助遙控操作以克服尾流影響,并對準(zhǔn)收放裝置沖入滑道。此收放設(shè)備既可設(shè)置在艙內(nèi),也可設(shè)置在露天部位。

表2 典型的艉部滑道式收放技術(shù)Table 2 Typical launch and recovery technologies of stern ramp
1.3 塢艙式快速收放技術(shù)
關(guān)于利用塢艙搭載USV的技術(shù),現(xiàn)有研究認為需針對塢艙開發(fā)適用于USV的快速收放系統(tǒng),包括托架式和滑道式。該收放技術(shù)應(yīng)具有多樣化的特點,并與其他收放技術(shù)相比易于實現(xiàn)。國內(nèi)外暫無在塢艙內(nèi)快速收放USV的應(yīng)用案例。
塢艙托架式收放系統(tǒng)是將USV存放在塢艙內(nèi)的托架上,出艙前先打開艙門向艙內(nèi)注水,此時托架上的USV浮起,然后再打開鎖定裝置,遙控其駛離托架便可完成布放,而回收過程與此相反。塢艙滑道式收放系統(tǒng)則是在塢艙內(nèi)設(shè)置傾斜滑道,回收時打開艙門向艙內(nèi)注水,系統(tǒng)的USV只需駛?cè)雰A斜滑道便可通過牽引絞車等多種方式實現(xiàn)回收,而布放過程則僅需從滑道滑入水中即可。該收放系統(tǒng)可借鑒圖3所示的載人小艇收放裝置,其收放設(shè)備布置在艙內(nèi),可用艉門遮擋存放。
2 現(xiàn)有收放技術(shù)對比
如前所述,目前USV主要有3種收放技術(shù)。下文將從設(shè)備配置、空間需求、波浪影響(主要分析橫搖和縱搖影響)、母船航速、適應(yīng)海況、操作情況、收放耗時等方面對3種USV收放技術(shù)進行對比分析。
1)設(shè)備配置。
舷側(cè)吊放式收放技術(shù)、艉部伸縮臂吊放式收放技術(shù)、艉滑道式收放技術(shù)、塢艙式快速收放技術(shù)均需根據(jù)技術(shù)需求配置相應(yīng)的成套設(shè)備(表3),若設(shè)備采用艙內(nèi)布置,還需要設(shè)置遮蔽裝置[24-25]。
2)空間需求。
舷側(cè)吊放式收放設(shè)備既可布置在艙內(nèi),也可布置在露天部位,采用艙內(nèi)布置時需要在舷側(cè)設(shè)置開口;艉部伸縮臂吊放式收放設(shè)備布置在艙內(nèi),需在母船艉部設(shè)置開口;艉滑道式收放裝置既可布置在艙內(nèi),也可布置在露天部位,但需在母船艉部設(shè)置開口;塢艙式快速收放設(shè)備布置在艙內(nèi),需要在船艉配置大型塢艙,且對船體結(jié)構(gòu)有著特殊要求。
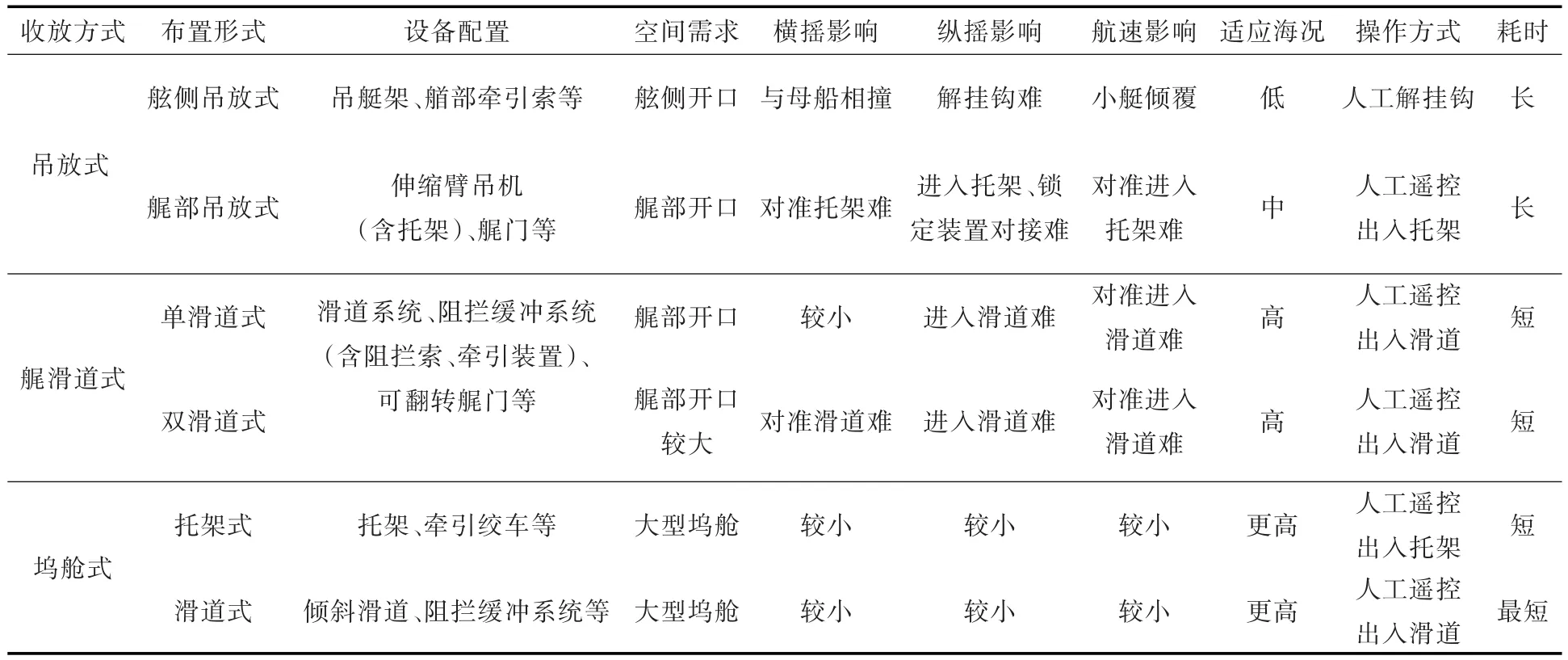
表3 收放技術(shù)對比Table 3 Comparison of launch and recovery technologies
3)波浪影響。
USV在波浪作用下會產(chǎn)生包括橫蕩、縱蕩、垂蕩、橫搖、縱搖及艏搖的六自由度運動,其中橫搖、縱搖對收放過程的影響最大[26-27]。舷側(cè)吊放式收放技術(shù)主要受母船的興波和海浪影響,二者疊加后產(chǎn)生的劇烈橫搖可能會使USV撞上母船,而縱搖則給人工解/掛鉤帶來較大難度[28-30];艉部伸縮臂吊放式收放技術(shù)主要受母船尾流和海浪影響,橫搖會妨礙USV對準(zhǔn)托架,縱搖可能會使USV與托架分別處于波峰和波谷中,不僅使USV進入托架變得困難,而且給快速脫鉤裝置鎖定或釋放USV造成障礙;艉滑道式收放技術(shù)也主要受母船尾流和海浪的影響,橫搖會妨礙USV對準(zhǔn)艉部滑道,而劇烈的縱搖可能會使母船艉部升起、離開水面,使USV進入滑道時存在較大難度;波浪對塢艙式收放技術(shù)的影響相對較小,一旦USV駛?cè)雺]艙,便可關(guān)閉艉門,在塢艙內(nèi)部通過人工輔助操作實現(xiàn)收放,可最大限度地降低波浪對收放過程的影響。
4)航速影響。
舷側(cè)吊放式收放過程不適宜在母船高航速下進行。在布放過程中,當(dāng)USV剛?cè)胨畷r,在纜索的拖拽下可能會造成艇體傾覆。在回收過程中,當(dāng)USV為完成掛鉤而減速,在速度不匹配時,仍可能出現(xiàn)拖帶導(dǎo)致傾覆的風(fēng)險[31-32]。艉部伸縮臂吊放式收放技術(shù)在母船航速過高時會增加USV對準(zhǔn)駛?cè)胪屑艿碾y度;艉滑道式收放技術(shù)在母船航速過高時會增加USV對準(zhǔn)駛?cè)牖赖碾y度;塢艙式快速收放技術(shù)僅需USV駛?cè)雺]艙,其收放作業(yè)可在艙內(nèi)完成,對母船航速適應(yīng)性更好。
5)適應(yīng)海況。
舷側(cè)吊放式收放技術(shù)由于受風(fēng)浪影響較大,難以適應(yīng)高海況下的收放作業(yè);艉部伸縮臂吊放式收放技術(shù)和艉滑道式收放技術(shù)受風(fēng)浪影響較小,可在較高海況下完成收放作業(yè);塢艙式快速收放技術(shù)受風(fēng)浪影響更小,可適應(yīng)更高海況下的作業(yè)。
6)操作方式。
舷側(cè)吊放式收放技術(shù)由于受到航速、海況等因素影響較大,仍需人工遙控USV駛?cè)胫付ㄎ恢煤笤龠M行解掛鉤操作;艉部伸縮臂吊放式收放技術(shù)受海況等因素影響較大,需人工遙控USV對準(zhǔn)駛?cè)胪屑埽霍夯朗绞辗偶夹g(shù)受波浪影響較大,需人工遙控USV對準(zhǔn)駛?cè)牖溃粔]艙式快速收放技術(shù)受航速、海況等因素影響不大,需要人工遙控USV對準(zhǔn)駛?cè)胪屑芑蚧馈?/p>
7)收放耗時。
根據(jù)以上分析可知,在一般情況下,3種收放技術(shù)的收放耗時由短到長依次為:塢艙式快速收放技術(shù)<艉滑道式收放技術(shù)<吊放式收放技術(shù)。
綜合以上對比和分析可知,塢艙式快速收放技術(shù)形式受航速、海況等因素的影響不大,但需配置大型塢艙,且對船體結(jié)構(gòu)要求比較特殊,適合在各種塢船上推廣應(yīng)用;吊放式收放技術(shù)對母船航速、海況適應(yīng)性較差,人工解掛鉤等操作比較費時,安全性較低,可在已經(jīng)使用吊放式收放技術(shù)的船舶上繼續(xù)發(fā)展;艉滑道式收放技術(shù)在空間需求、母船航速、適應(yīng)海況、操作情況、收放耗時等方面綜合表現(xiàn)更好。因此,本文認為艉滑道式收放技術(shù)更適合于USV的收放需要,也符合未來收放方式的發(fā)展趨勢[9]。
3 收放技術(shù)的發(fā)展方向
美國《海軍無人水面艇總體規(guī)劃》對USV收放技術(shù)提出了長遠的技術(shù)路線圖,指出了收放技術(shù)面臨的主要挑戰(zhàn),包括惡劣環(huán)境下收放過程的安全性、可操作性和收放技術(shù)的簡便性、通用性、便攜性等。上述對比分析表明,艉滑道式收放技術(shù)代表了USV收放技術(shù)的發(fā)展方向,結(jié)合國內(nèi)外收放技術(shù)開發(fā)面臨的難點,有助于準(zhǔn)確判斷該技術(shù)今后的發(fā)展趨勢,并開展相關(guān)研究[33-35]。
3.1 通用型滑道技術(shù)
滑道對于USV停放可以起到支撐作用。在布放時,可依靠重力沿滑道靈活下滑;回收時,也需滑道保持正確導(dǎo)向,并具有一定的碰撞保護功能[36]。另外,為保證USV回收的成功率,滑道最底端需低于水線一定的距離,但如此設(shè)計可能導(dǎo)致滑道位置更靠近母船底部空間,從而影響艉部艙室的設(shè)備布置,因此,通常采用在下翻式艉門結(jié)構(gòu)上設(shè)置滑道,以作為滑道的延伸部分來解決該問題[37]。由于母船和USV型號不盡相同,考慮到收放機構(gòu)的兼容性問題和降低成本的需求,有必要開展通用型收放技術(shù)的研究[38]。在艉滑道式收放技術(shù)中,通用型滑道裝置不僅可以在不同母船上安裝,也可通過調(diào)整滑道結(jié)構(gòu)以適應(yīng)不同USV和UUV的收放要求,如美國物理科學(xué)公司設(shè)計的通用型艉滑道收放系統(tǒng)。由此可見,通用型滑道技術(shù)是USV收放系統(tǒng)首先要解決的關(guān)鍵問題。
3.2 自動阻攔對接技術(shù)
由于母船艉部滑道一般較短,而USV沖排時會帶有一定的航速,若不及時將USV阻攔,可能造成USV沖出滑道、撞擊船體的后果。因此,設(shè)計自動阻攔對接機構(gòu),采取適當(dāng)?shù)拇胧⑼w有效阻攔,吸收沖排時的動能并自動與艇艏掛鉤。可避免因USV速度過快沖出滑道而帶來的損壞;在布放時,阻攔對接機構(gòu)也可與艇艏自動脫鉤,使USV依靠重力自動滑入水中。
3.3 高精度回收引導(dǎo)控制技術(shù)
高精度回收引導(dǎo)控制技術(shù)需要USV在復(fù)雜海況下持續(xù)跟蹤母船,由遠及近地分別識別母船、滑道標(biāo)識、阻攔對接標(biāo)識,在躲避障礙物、不斷調(diào)整自身位置、克服海浪和尾流影響后駛?cè)牖啦⑼瓿苫厥者^程[39-42]。在USV回收過程中,海況復(fù)雜,艇體晃動劇烈,光線雨霧情況會對激光雷達和相機等傳感器的探測精度及跟蹤穩(wěn)定性帶來較大影響,因此,必須采用多傳感器融合的解決途徑,開展高精度回收引導(dǎo)算法的研究,以保證跟蹤過程的準(zhǔn)確性和穩(wěn)定性[43-44]。國內(nèi)某單位的研究方案則是利用毫米波雷達進行遠距離探測,激光雷達進行中距離探測,雙目相機進行近距離精確對準(zhǔn),并采用多傳感器主、被動融合思路和TLD(Track?ing-Learning-Detection)算法,利用跟蹤結(jié)果進行在線學(xué)習(xí),最終實現(xiàn)USV高精度回收引導(dǎo)控制。
4 結(jié) 語
本文對國內(nèi)外目前的USV收放技術(shù)現(xiàn)狀進行了歸納總結(jié),從設(shè)備配置、空間需求、波浪影響、母船航速、適應(yīng)海況、操作方式、收放耗時等方面,對國內(nèi)外主要采取的吊放式、艉滑道式、塢艙式3種收放技術(shù)進行了對比分析,指出艉滑道式收放技術(shù)更適合于USV投送的需要。針對艉滑道式收放裝置的特點,借鑒美國《海軍無人水面艇總體規(guī)劃》技術(shù)路線圖,提出了有效實施艉滑道式收放裝置需解決通用型滑道技術(shù)、自動阻攔對接技術(shù)、高精度回收引導(dǎo)控制技術(shù)等核心技術(shù),為后續(xù)收放裝置的技術(shù)攻關(guān)指出了研究方向。
現(xiàn)階段USV收放技術(shù)尚處于發(fā)展初期,國內(nèi)收放技術(shù)的發(fā)展與先進國家相比仍存在較大差距,國內(nèi)艦船行業(yè)應(yīng)迎接USV收放過程中的各種挑戰(zhàn),準(zhǔn)確把握快速發(fā)展中的趨勢,制定出明確的發(fā)展規(guī)劃,開展有針對性的研究,以早日攻克USV自動收放技術(shù)的世界性難題。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32