基于距離誤差的機(jī)器人參數(shù)辨識(shí)模型與冗余性分析
2018-12-04 09:12:40申景金郭家楨MASOUDKalantari
農(nóng)業(yè)機(jī)械學(xué)報(bào) 2018年11期
申景金 郭家楨 MASOUD Kalantari
(1.南京郵電大學(xué)自動(dòng)化學(xué)院, 南京 210023; 2.國民油井華高公司高新技術(shù)部, 卡爾加里 T2P 3G3)
0 引言
機(jī)器人運(yùn)動(dòng)學(xué)誤差是指由零件加工誤差、裝配誤差等造成的機(jī)器人關(guān)節(jié)實(shí)際軸線方位和名義方位之間的差異。根據(jù)誤差辨識(shí)方式的不同,機(jī)器人運(yùn)動(dòng)學(xué)參數(shù)辨識(shí)可分為開環(huán)辨識(shí)法、閉環(huán)辨識(shí)法和關(guān)節(jié)軸直接測定法[1-4]。其中,開環(huán)辨識(shí)法基于誤差模型,以多個(gè)位形下機(jī)器人末端位姿誤差為目標(biāo)函數(shù),運(yùn)用優(yōu)化算法實(shí)現(xiàn)機(jī)器人參數(shù)辨識(shí)。在辨識(shí)過程中,若直接利用末端的絕對(duì)位置誤差和角度誤差,會(huì)涉及位姿誤差在測量坐標(biāo)系和機(jī)器人基坐標(biāo)系之間的轉(zhuǎn)換,降低了參數(shù)辨識(shí)的精度[5]。為避免坐標(biāo)系之間的變換,可采用具有坐標(biāo)系不變性的距離誤差。文獻(xiàn)[6-9]分別把距離誤差引入到DH模型、MDH模型、DH/MDH模型、加法型指數(shù)積模型,對(duì)機(jī)器人的運(yùn)動(dòng)學(xué)參數(shù)進(jìn)行了辨識(shí)。為實(shí)現(xiàn)有效辨識(shí),辨識(shí)參數(shù)須滿足完備性、比例性和連續(xù)性原則[10-11]。但是,對(duì)于距離誤差辨識(shí)方法,辨識(shí)參數(shù)冗余性方面的研究還相對(duì)匱乏[12-14]。
本文利用關(guān)節(jié)旋量的空間幾何特性,建立機(jī)器人的伴隨變換型距離誤差模型,使得辨識(shí)后的關(guān)節(jié)旋量自動(dòng)滿足物理約束條件。在此基礎(chǔ)上,基于辨識(shí)雅可比矩陣的零空間,分析不同距離誤差測量方式下可辨識(shí)參數(shù)的冗余性。最后,通過實(shí)驗(yàn)對(duì)距離誤差模型的有效性和參數(shù)冗余性分析的正確性進(jìn)行驗(yàn)證。
1 伴隨變換型誤差模型
1.1 正運(yùn)動(dòng)學(xué)模型
對(duì)于n自由度串聯(lián)機(jī)器人,令i和θi分別為轉(zhuǎn)動(dòng)關(guān)節(jié)i的運(yùn)動(dòng)旋量和轉(zhuǎn)動(dòng)角度,則有
(1)
其中
vi=qiwi
式中O1×3——1行3列零矩陣
vi——關(guān)節(jié)量矩
qi——關(guān)節(jié)軸線上任一點(diǎn)坐標(biāo)
對(duì)于轉(zhuǎn)動(dòng)關(guān)節(jié),wi和vi須滿足物理約束條件
(2)
基于指數(shù)積形式機(jī)器人正運(yùn)動(dòng)學(xué)模型表示為
gst=ee…egst0
(3)

(4)
式中R——末端坐標(biāo)系相對(duì)于基坐標(biāo)的旋轉(zhuǎn)矩陣
θi——轉(zhuǎn)動(dòng)關(guān)節(jié)i的轉(zhuǎn)動(dòng)角度
p——末端坐標(biāo)系原點(diǎn)在基坐標(biāo)系的坐標(biāo)
gst、gst0——當(dāng)前位形和初始位形下機(jī)器人末端相對(duì)于其基坐標(biāo)系的位姿矩陣
1.2 關(guān)節(jié)旋量的誤差補(bǔ)償
(5)
(6)
式中 Δξ——關(guān)節(jié)運(yùn)動(dòng)旋量實(shí)際值和名義值差值
Ade——旋量對(duì)應(yīng)的伴隨矩陣(圖1)與加法方法相比,伴隨變換方法通過剛體變換把和聯(lián)系起來,不僅具有明確的物理意義,而且保證旋量自動(dòng)滿足式(2)[15]。此時(shí),對(duì)關(guān)節(jié)旋量的補(bǔ)償即為確定旋量
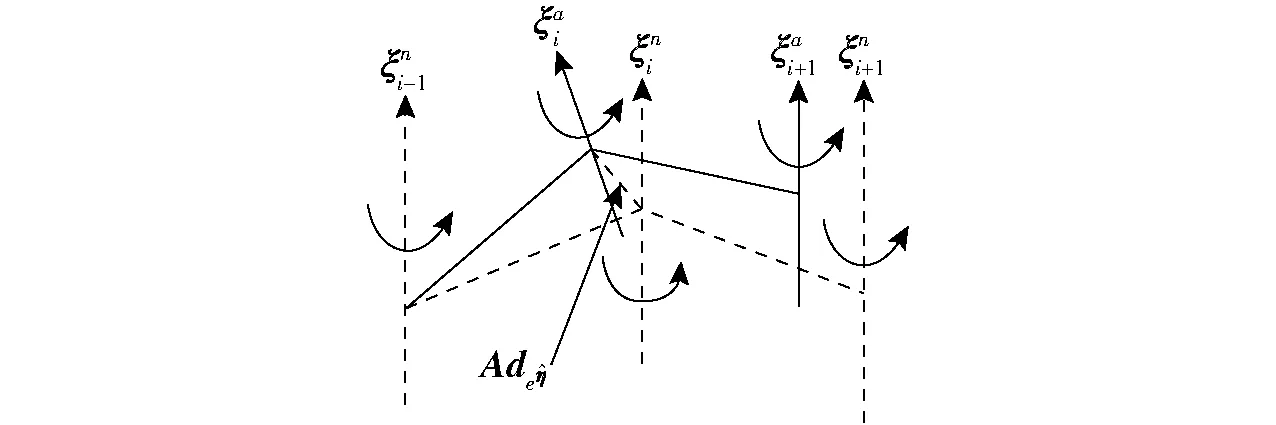
圖1 關(guān)節(jié)旋量的伴隨變換誤差補(bǔ)償Fig.1 Error compensation of joint screw using adjoint transform
由旋量理論可知:η∈se(3),se(3)為特殊歐氏群SE(3)的李代數(shù)。由于se(3)部分旋量元素構(gòu)成的子空間N(ξn)對(duì)伴隨變換補(bǔ)償無效,為剔除誤差模型中的冗余參數(shù),令η可取得有效子空間為Σ(ξn),則有
N(ξn)⊕Σ(ξn)=se(3)
(7)
(8)

(9)
其中
式中qn——關(guān)節(jié)軸線上某一點(diǎn)的坐標(biāo)

η=BK
(10)
其中
確定K中的4個(gè)系數(shù)即可實(shí)現(xiàn)對(duì)關(guān)節(jié)旋量的補(bǔ)償。
1.3 線性誤差模型
為得到線性誤差模型,對(duì)式(3)線性化可得
(11)
(12)
((δe)e)∨=
(13)
其中
(14)
sai=sinaicai=cosaiai=‖wηi‖

(15)
把式(15)代入式(11),同時(shí)對(duì)等號(hào)右側(cè)的末端初始位姿項(xiàng)進(jìn)行與關(guān)節(jié)旋量相同的分析,可得機(jī)器人線性誤差模型
(16)
其中δηi=BiKiδηst=BstKst
由于關(guān)節(jié)轉(zhuǎn)動(dòng)角度誤差δθi可用關(guān)節(jié)旋量誤差表達(dá),因此δθi和δηi不能同時(shí)通過式(16)進(jìn)行辨識(shí)[17]。后續(xù)的分析中,把δθi誤差歸結(jié)于δηi的誤差中。為方便表達(dá),把式(16)寫成
(17)
其中Qi=Adi-1-AdiQs=Adn
機(jī)器人末端點(diǎn)位置的誤差dq可表達(dá)為
(18)
2 距離誤差模型和參數(shù)冗余性分析
2.1 距離誤差模型
距離誤差表示機(jī)器人運(yùn)動(dòng)過程中末端點(diǎn)的實(shí)際運(yùn)動(dòng)距離與名義距離之間的偏差。對(duì)任意兩個(gè)位形,末端點(diǎn)的距離誤差δl與其位置誤差之間存在如下關(guān)系[18]
(19)
把式(19)代入式(18),dq2-dq1可具體表達(dá)為

其中
(20)

(21)
若r為機(jī)器人轉(zhuǎn)動(dòng)關(guān)節(jié)的個(gè)數(shù),通過對(duì)雅可比矩陣奇異性的分析,文獻(xiàn)[19]已確定位姿誤差模型式(17)可辨識(shí)4r+6個(gè)參數(shù),位置誤差模型式(18)可辨識(shí)4r+3個(gè)參數(shù)。本文將確定采用距離誤差時(shí)可辨識(shí)參數(shù)的數(shù)目。
2.2 可辨識(shí)參數(shù)冗余性分析
可辨識(shí)參數(shù)的冗余性是指辨識(shí)參數(shù)之間存在線性相關(guān)性,使得辨識(shí)雅可比矩陣奇異,降低參數(shù)辨識(shí)的精度。為避免該問題,可通過參數(shù)的冗余性分析,在誤差模型中預(yù)先剔除線性相關(guān)的參數(shù)。
(1)初始位置參數(shù)Kst的可辨識(shí)性
由式(17)可得
(22)
顯然
此時(shí),初始位置參數(shù)的雅可比矩陣為關(guān)節(jié)旋量雅可比矩陣的線性組合。因此,在距離誤差模型中,Kst不可與關(guān)節(jié)旋量同時(shí)辨識(shí)。
(2)關(guān)節(jié)旋量參數(shù)Ki的可辨識(shí)性
為分析Ki可辨識(shí)性,考慮3種不同的距離誤差測量方式。
①采用繞對(duì)應(yīng)關(guān)節(jié)軸線旋轉(zhuǎn)的末端距離誤差測量方式,機(jī)器人運(yùn)動(dòng)到如下位形
(23)
此時(shí),式(21)中雅可比矩陣的元素為
(24)
根據(jù)1.2節(jié)所述,無效子空間N(ξn)的基向量可作為待求零空間的兩個(gè)基向量。為確定其余3個(gè)基向量,考慮式(10)中B的張成基,可以看到零空間的基矢量ζ為

(25)
(26)

式(25)可簡化為
(27)
顯然地,零空間的兩個(gè)基向量可選擇為

(28)


②為辨識(shí)與λ1和λ2相關(guān)的參數(shù),對(duì)i≥2關(guān)節(jié),考慮第2種測量方式,即相對(duì)于初始位形測量距離誤差
(29)
式(21)中的雅可比矩陣有
(30)
為分析{λ1,λ2}是否位于該種測量的零空間,首先對(duì)λ1進(jìn)行分析。
(31)


(32)
其中

(33)

③為辨識(shí)與κ相關(guān)的參數(shù),考慮第3種測量方式,即
(34)
(35)
3 實(shí)驗(yàn)驗(yàn)證
為驗(yàn)證所建立的距離誤差模型的有效性和辨識(shí)參數(shù)冗余性分析的正確性,利用三維掃描儀和5自由度KUKA youBot機(jī)器人搭建實(shí)驗(yàn)平臺(tái)(圖2)。通過點(diǎn)云處理和數(shù)據(jù)分析后,掃描儀的對(duì)齊誤差精度小于0.02 mm,遠(yuǎn)高于KUKA youBot運(yùn)動(dòng)精度,滿足機(jī)器人標(biāo)定的要求。另外,通過誤差統(tǒng)計(jì)分析,確定了忽略高階誤差項(xiàng)的線性模型可實(shí)現(xiàn)對(duì)KUKA youBot機(jī)器人運(yùn)動(dòng)學(xué)參數(shù)的有效辨識(shí)[21]。
圖2 機(jī)器人標(biāo)定實(shí)驗(yàn)平臺(tái)Fig.2 Experiment platform of robot calibration1.KUKA youBot機(jī)器人 2.天遠(yuǎn)三維掃描儀 3.控制器 4.計(jì)算機(jī)點(diǎn)云處理及配套軟件
為驗(yàn)證辨識(shí)參數(shù)冗余性分析的正確性,分別采用第1種測量方式和第2種測量方式生成20個(gè)機(jī)器人運(yùn)動(dòng)位形。在第1種測量方式的每次測量過程中,只有一個(gè)驅(qū)動(dòng)關(guān)節(jié),其余關(guān)節(jié)為鎖定狀態(tài)。在隨機(jī)生成驅(qū)動(dòng)關(guān)節(jié)對(duì)應(yīng)于參考位形和驅(qū)動(dòng)位形的角度后,通過測量機(jī)器人末端從參考位形運(yùn)動(dòng)到驅(qū)動(dòng)位形的相對(duì)位移,來完成一次測量。從基關(guān)節(jié)開始,全部關(guān)節(jié)依次被設(shè)定為驅(qū)動(dòng)關(guān)節(jié)。對(duì)每一個(gè)驅(qū)動(dòng)關(guān)節(jié),分別測量4組不同位形下的機(jī)器人末端運(yùn)動(dòng)位移。在第2種測量方式的每次測量過程中,兩個(gè)相鄰的關(guān)節(jié)為驅(qū)動(dòng)關(guān)節(jié),其余關(guān)節(jié)為鎖定狀態(tài)。與第1種測量方式的參考位形可變不同,第2種測量方式的參考位形保持為機(jī)器人的初始位形。對(duì)4組不同的驅(qū)動(dòng)關(guān)節(jié),分別測量5組不同位形下的末端位移。將測量數(shù)據(jù)和不同位形的關(guān)節(jié)角代入式(21),即可確定機(jī)器人的距離誤差模型。通過對(duì)誤差模型中雅可比矩陣的特征值分析,發(fā)現(xiàn)在2種測量方式下,雅可比矩陣的秩分別為10和14,這與冗余性分析結(jié)果相一致。
在實(shí)際辨識(shí)時(shí),為得到較好的辨識(shí)效果,一般隨機(jī)產(chǎn)生大量的機(jī)器人運(yùn)動(dòng)位形,從中選擇所構(gòu)成的雅可比矩陣中特征值較大的行所對(duì)應(yīng)的位形,作為辨識(shí)位形。本文實(shí)驗(yàn)過程中,在隨機(jī)生成的100個(gè)不同運(yùn)動(dòng)位形中,選擇了32個(gè)特征值較大的位形用于機(jī)器人的運(yùn)動(dòng)學(xué)參數(shù)辨識(shí)。此時(shí),把實(shí)驗(yàn)數(shù)據(jù)代入式(19),通過辨識(shí)雅可比矩陣的奇異值分解,發(fā)現(xiàn)可辨識(shí)參數(shù)的個(gè)數(shù)為18,驗(yàn)證了距離誤差模型所辨識(shí)參數(shù)最多為4r-2。
基于距離誤差模型和實(shí)驗(yàn)數(shù)據(jù),采用最小二乘法對(duì)機(jī)器人運(yùn)動(dòng)學(xué)參數(shù)進(jìn)行迭代求解。圖3給出了測量位形上距離誤差最大值、平均值和迭代步數(shù)之間的關(guān)系。經(jīng)過3次迭代之后,機(jī)器人參數(shù)收斂到穩(wěn)定值(表1)。圖4給出了3次迭代過程中,32個(gè)測量位形上的距離誤差的變化曲線。所測量位形的距離誤差最大值由6.226 mm降低到0.718 8 mm,精度提高了8.7倍,距離誤差平均值從2.978 mm降低到0.257 6 mm,精度提高了11.6倍。
圖3 距離誤差與迭代次數(shù)之間的關(guān)系Fig.3 Relationship between distance errors and iterations
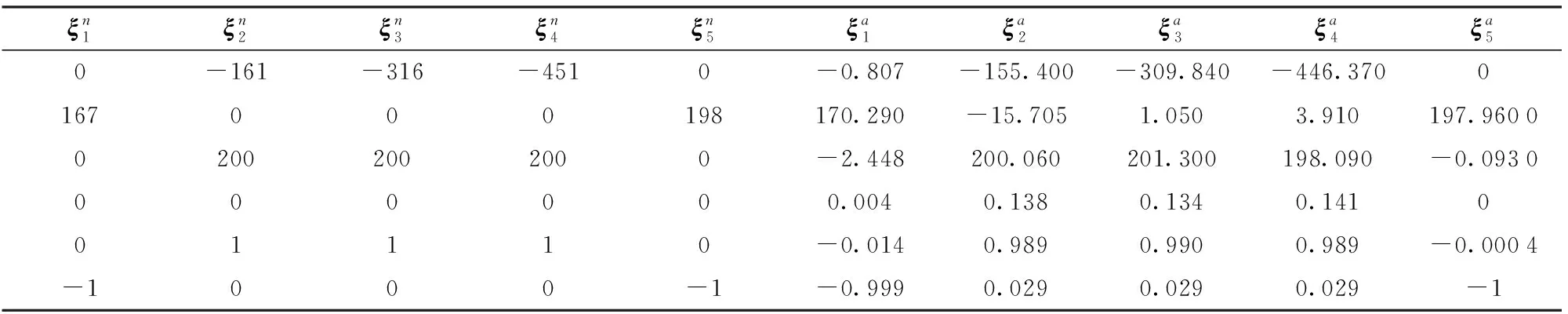
表1 關(guān)節(jié)旋量的名義值ξn和辨識(shí)值ξaTab.1 Nominal value ξn and identified value ξa of joint screws
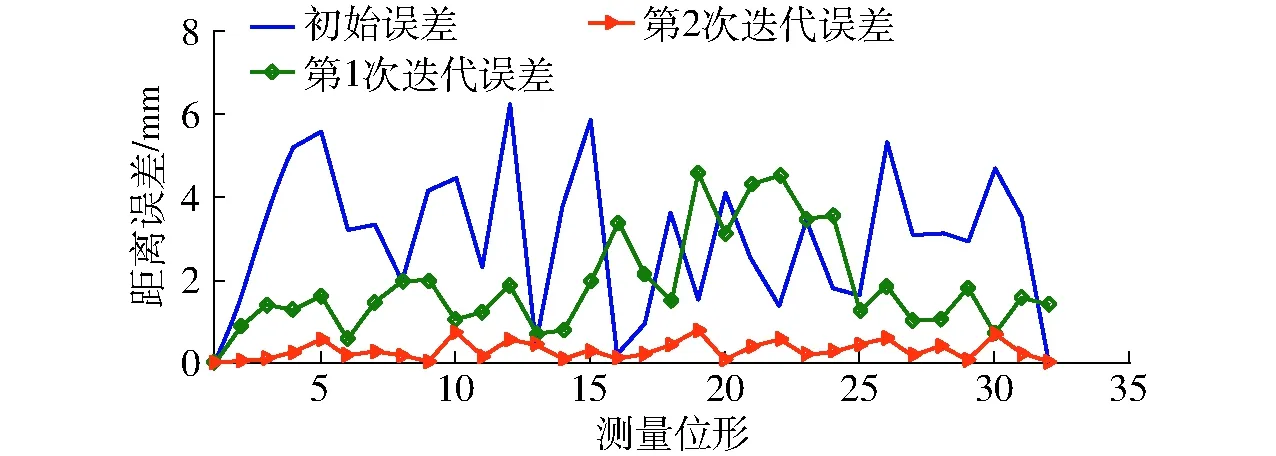
圖4 不同位形上的距離誤差變化Fig.4 Variations of distance errors with respect to different configurations
4 結(jié)論
(1)為實(shí)現(xiàn)機(jī)器人運(yùn)動(dòng)學(xué)參數(shù)辨識(shí),建立了基于關(guān)節(jié)旋量伴隨變換的距離誤差模型,提出了一種誤差測量策略,并通過實(shí)驗(yàn)驗(yàn)證了該模型的有效性。
(2)確定了距離誤差模型的可辨識(shí)測量方式之間的關(guān)系,可辨識(shí)參數(shù)的最大數(shù)目為 4r-2;繞對(duì)應(yīng)關(guān)節(jié)轉(zhuǎn)動(dòng)的測量方式為2r;相對(duì)于初始位形的參數(shù)與誤差測量方式為 3r-1。
(3)所采用的辨識(shí)雅可比矩陣零空間分析方法,可為其他誤差模型中參數(shù)相關(guān)性分析提供參考。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
