基于ANSYS/LS-DYNA的梳夾式紅花采摘裝置研究
2018-12-04 09:03:58曹衛彬孫胃嶺焦灝博陳棒棒
農業機械學報 2018年11期
曹衛彬 孫胃嶺 牛 馳 焦灝博 陳棒棒
(石河子大學機械電氣工程學院, 石河子 832003)
0 引言
紅花是集藥材、染料、油料為一體的經濟作物[1],隨著紅花種植面積不斷擴大,勞動力短缺,以及人工采摘效率低等問題日益凸顯[2],實現高采收效率、低掉落損失率的機械化采收對紅花的發展具有重要意義。目前紅花采摘機械研究多集中于氣吸式、氣吸-切割式、氣吸-氣吹式的手持或背負采摘裝置,采花工需背負或手持采摘裝置對準花球以采摘花絲,增加了勞動強度,且存在能耗大、噪聲大、掉落損失嚴重等問題,并沒有得到推廣應用,國內學者提出的對輥采摘方案仍處于理論研究階段[3-10]。針對上述問題,本課題組提出了一種梳夾式紅花采摘裝置,通過限位桿與梳齒的時序動作使花球相對固定,然后梳齒夾緊旋轉實現花絲的自走式采摘,對降低勞動強度、提高采收效率、實現紅花絲機械化采收具有一定的參考意義。
ANSYS/LS-DYNA是通用顯式非線性動力分析有限元程序,可求解非線性結構的高速碰撞、沖擊載荷和材料非線性問題,可連續動態地顯示事物的發展。柴少彪等[11]對制動過程中鼓式制動器的接觸摩擦情況與接觸應力的分布進行了模擬分析;夏俊芳等[12]對螺旋刀輥土壤切削時螺旋刀輥與土壤的交互作用進行了有限元模擬,得出了螺旋刀輥切削土壤的功率消耗、切削阻力的大小以及土壤等效應力的變化規律;廖宜濤等[13]對蘆竹切割-進給速度進行了匹配研究,動態模擬了蘆竹切割破壞過程并確定了最優工作參數。在限位桿限位和梳齒的沖擊碰撞作用下,分枝和花球的運動姿態很難通過理論分析得到,參考相關農業機械的研發過程[14-17],本文基于ANSYS/LS-DYNA建立梳夾采摘裝置與紅花植株的剛柔耦合模型,進行虛擬采摘過程仿真,通過分析不同結構和運動參數對不同高度分枝及花球運動姿態的影響,得到最優采摘參數并進行試驗驗證,為紅花絲采摘提供理論依據。
1 梳夾采摘裝置結構與工作原理
1.1 采摘裝置總體結構
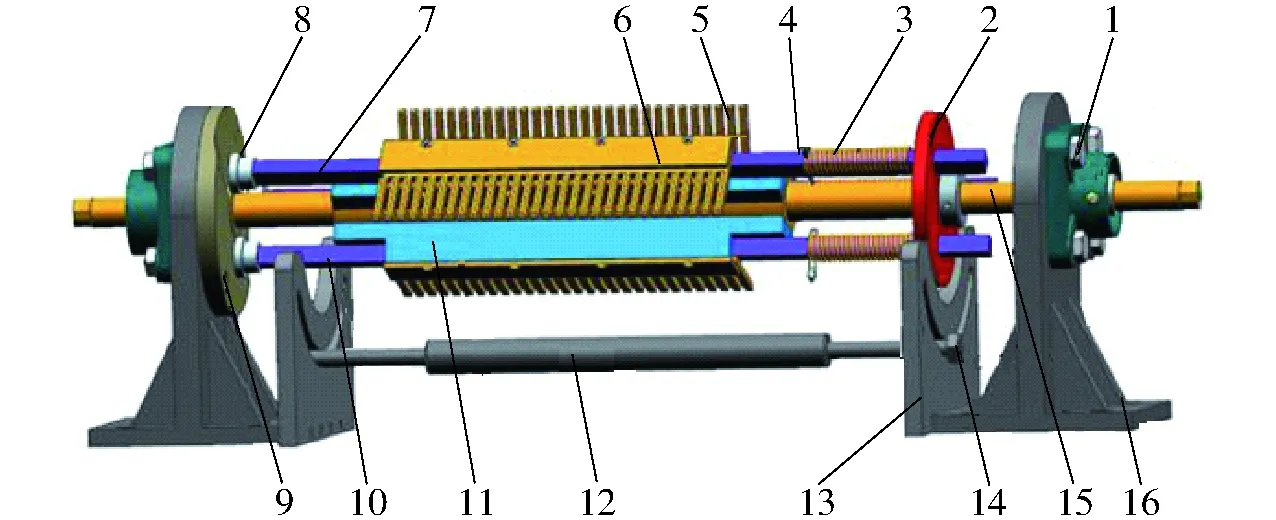
圖1 梳夾采摘裝置結構圖Fig.1 Schematic of combed safflower picking device1.軸承 2.彈簧擋板 3.彈簧 4.開口銷 5.定齒 6.動齒 7.滑臺 8.萬向球 9.端面凸輪 10.安裝座 11.固定板 12.限位桿 13.滑軌 14.鎖緊螺母 15.旋轉軸 16.機架
梳夾采摘裝置由梳齒采摘部分、往復運動機構及限位機構組成,如圖1所示。其中梳齒采摘部分包括旋轉軸、安裝座、滑臺、動齒、定齒及固定板,固定板通過螺栓擰緊于定齒座上,固定板固定動齒上表面以限制動齒偏離。往復運動機構由彈簧和端面凸輪組成,其中輔助零件有萬向球、開口銷、彈簧擋板等;動齒一端通過萬向球與凸輪接觸,萬向球滾動可減少凸輪的磨損,另一端是彈簧擋板和彈簧。在凸輪回程時,彈簧發生彈性恢復,動、定齒夾緊;在凸輪升程時彈簧壓縮,動、定齒分離。限位機構由限位桿和滑軌組成,可調節范圍是以固定半徑繞旋轉軸中心的半圓弧,限位桿在弧形滑軌中調節與梳齒的相對位置,并通過兩端的鎖緊螺母固定。
1.2 采摘裝置工作原理
紅花如圖2所示,采摘過程中梳齒與花球或分枝接觸發生彈性碰撞,分枝柔性和花球質量較大,導致花球位置難以固定,花絲很難喂入梳齒間隙,本裝置通過限位桿調節采摘時花球的位置與姿態,進而提高梳齒間花絲喂入量。限位桿首先作用于花球或分枝,隨著采摘裝置繼續行走,分枝在限位桿作用下側向彎曲,花球在彈性恢復的作用下緊貼于限位桿表面,此時梳齒作用于花球另一側,花球受到限位桿與梳齒相反方向的作用力,位置相對固定。此時在壓縮彈簧的作用下動、定齒夾緊花絲,隨著旋轉軸旋轉花絲實現拉拔,直至梳齒轉過花球位置夾緊動作結束;到達收集花絲的位置時,動齒在端面凸輪的作用下與定齒分離,實現花絲收集。
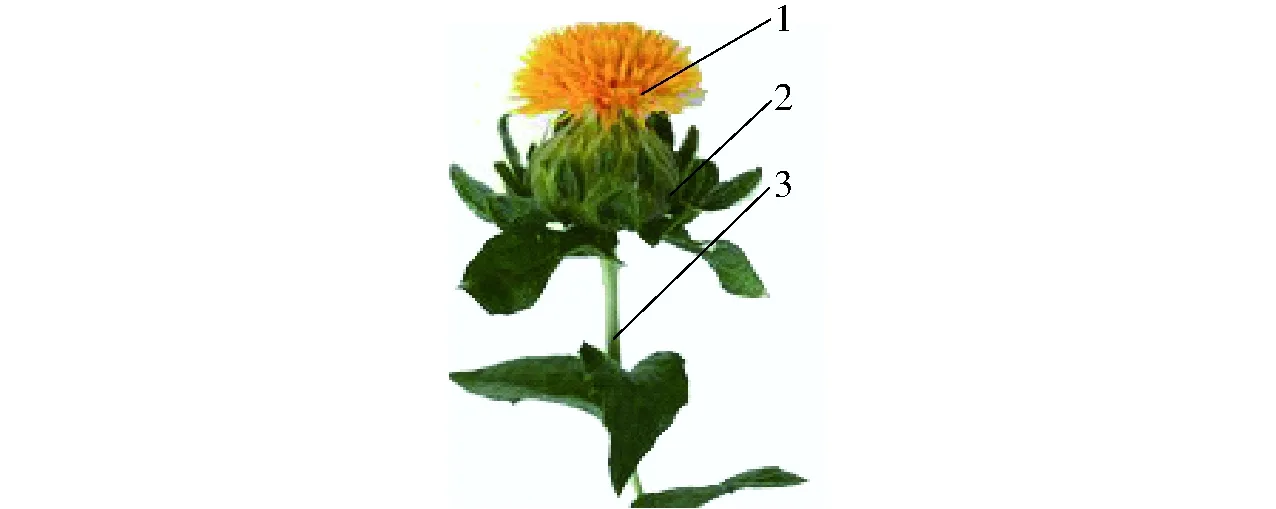
圖2 紅花Fig.2 Safflower1.花絲 2.花球 3.分枝
花絲喂入梳齒間隙后的夾緊及拉拔采摘與壓縮彈簧和梳齒強度有關,本文不做研究。花球到達上述理想采摘位置是花絲采摘的前提,是采摘裝置設計優化的主要目標,花球位置由限位桿和梳齒的時序動作以及兩者共同作用下花球及分枝的運動姿態共同決定,與采摘裝置的結構參數、運動參數以及采摘位置密切相關,為本文的主要研究內容,理想采摘位置見圖3。
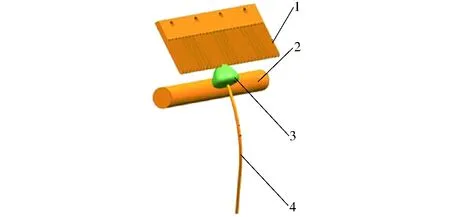
圖3 理想采摘位置Fig.3 Ideal picking position1.梳齒 2.限位桿 3.花球 4.分枝
2 顯式動力學模型分析與建立
2.1 顯式動力學模型分析
花球高低不一,散亂分布,為簡化問題,對分枝和花球作如下假設:處于自然狀態下的分枝與花球均為直立狀態,忽略其彎曲下垂;分枝下端到上端各處截面尺寸線性遞減而后遞增,為各項同性的柔性體;忽略花球在采摘過程中與梳齒的碰撞變形,花球為剛性體;忽略紅花葉片、花球、其他分枝及外界因素對所分析的分枝的運動干涉問題。
采摘過程中,梳齒與花球或柔性分枝發生接觸碰撞,兩個物體之間的碰撞可簡化為非線性瞬態動力學問題,柔性分枝及端部的剛性花球可假定為一端固定的懸臂梁,分枝底端為固定端,花球為自由端,運動包含了瞬時柔性碰撞及自由端大變形和自由端回彈,因此在分析過程中不可忽略慣性效應和碰撞速度載荷作用。為更加準確地模擬梳夾采摘過程,采用耦合求解的方法對采摘過程中梳齒與分枝及花球的有限元模型進行顯式動力學分析。
2.2 顯式動力學模型建立
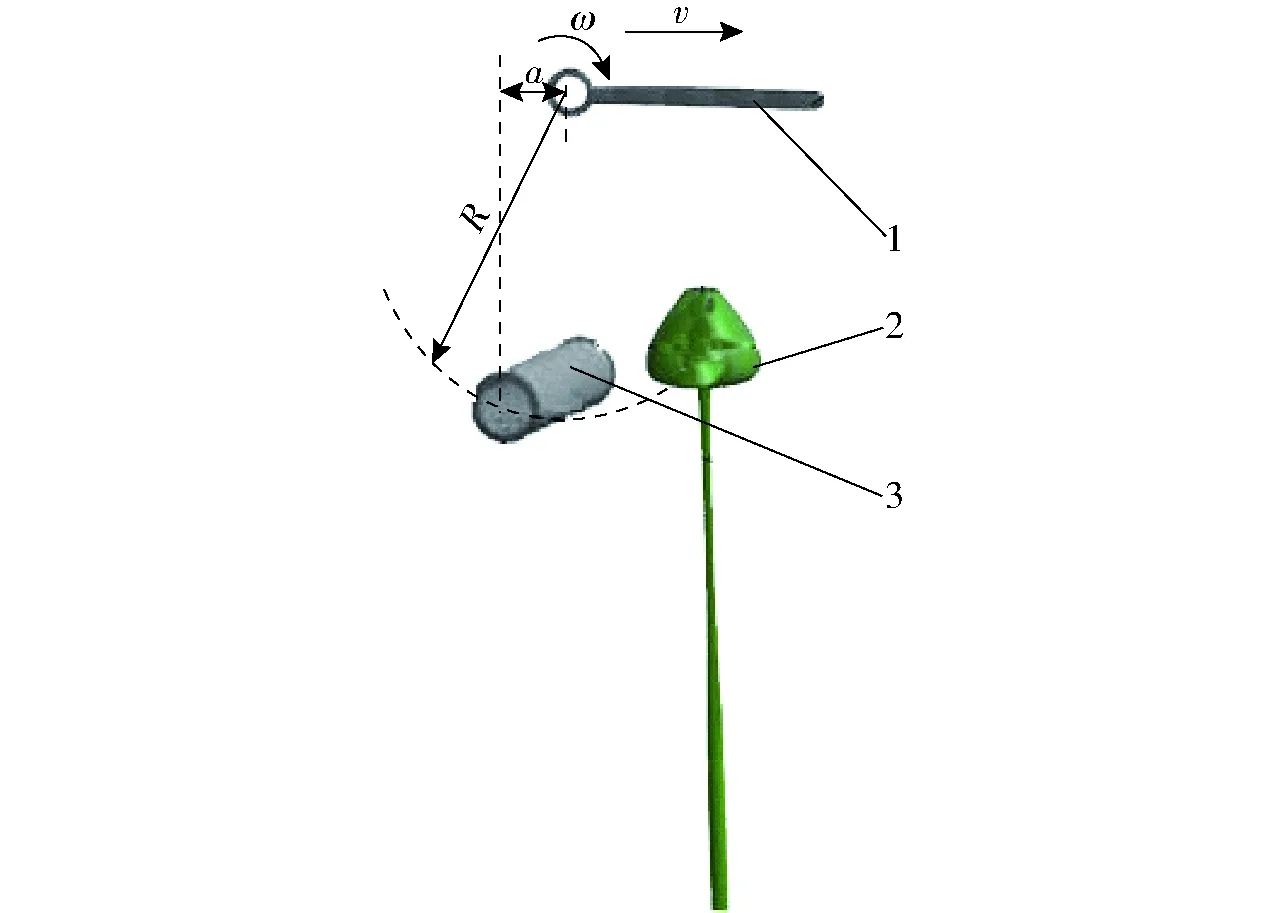
圖4 剛柔耦合動力學模型Fig.4 Rigid-flexible coupled dynamic model1.梳齒 2.紅花 3.限位桿
紅花分枝較多,且在分析過程中材料需定義為柔性體,極大地增加了運算量,因此以一個分枝和花球作為紅花簡化模型,同樣采摘裝置大量的零部件也會導致程序運行失敗,因此對關鍵部件梳齒及限位桿進行簡化,減少程序運行所占用的CPU內存,縮短運行時間,簡化模型見圖4。采摘裝置行走速度為v,梳齒轉速為n,角速度為ω,限位桿與梳齒回轉中心距R為85 mm,梳齒回轉半徑60 mm,a為限位桿與梳齒回轉中心的水平距離。
在NX 10.0中對紅花分枝、花球及采摘裝置的簡化模型進行三維建模,其分析過程:首先在NX 10.0中裝配梳齒以及紅花并確定相對位置,新建ANSYS中的Explicit Dynamics(LS-DYNA Export)模塊并導入生成模型;新建分枝材料并指定屬性參數,彈性模量E為90.236 7 MPa,泊松比為0.3,密度450 kg/m3,材料屬性為柔性體,花球密度為650 kg/m3,不考慮花球變形,花球設定為剛性體,梳齒設定為剛性材料。根據抗彎強度選取合適的單元類型并對其進行網格劃分,分枝進行精密網格劃分,如圖5所示;分枝與花球之間添加bonded約束,梳齒與分枝、限位桿與分枝間分別添加frictionless約束,以避免仿真過程中接觸碰撞時發生結構穿透;分枝底端為固定端,添加固定約束,花球為自由端;設定梳齒行進速度及轉速,設置分析參數及求解時間1 s,更新程序并得到動力學分析命令流K文件;在Mechanical APDL Product Launcher中加載K文件,為加快求解速度,設置memory words為200 000 000,Number of Cpus為4,選擇LS-DYNA Solver求解環境,輸出用于LS-Prepost后處理程序的結果文件d3plot,打開LS-Prepost軟件加載d3plot文件分析數值計算結果,并分析花球及分枝的運動姿態[18-19]。

圖5 動力學模型網格劃分Fig.5 Mesh for dynamic model
3 梳夾采摘過程仿真與分析
3.1 無限位桿采摘過程
王建偉等[20]根據線性彈簧阻尼模型模擬了鋼球與梁之間的碰撞機制,分析得到柔性梁隨著鋼球的質量、撞擊速度及撞擊位置的不同會產生不同的衰減振動。梳夾采摘過程與其相似,采摘裝置工作參數和花球高度是影響分枝及花球運動姿態的重要因素,本節分別對不同采摘裝置運動參數和花球采摘高度進行無限位桿的虛擬采摘過程分析。
花球和分枝的運動姿態與采摘裝置的運動參數密切相關,其決定了梳齒的運動軌跡[21]。梳齒是回轉運動和隨采摘裝置直線行走運動的合成運動,梳齒齒頂旋轉靜軌跡為
(1)
則梳齒齒頂復合運動的動軌跡為
(2)
隨著時間t的增大,梳齒運動軌跡為余擺線,軌跡的形狀與采摘裝置的行走速度v和梳齒轉速n有關,如圖6所示,EE′為余擺線扣環的最長橫弦,梳齒在EE′以上具有向前的速度,以下具有向后的速度,可掃過花絲,為梳齒工作區域。梳齒在與花球接觸后至少應掃過全部花絲才可以將花球上的花絲完全喂入梳齒,花絲成簇分布,分布直徑為15 mm,梳齒到達采摘點后至少應沿行進速度反向水平行進15 mm,即lEE′≥15 mm時,梳齒可以掃過全部花絲[22]。

圖6 梳齒運動軌跡Fig.6 Movement track of comb teeth
參考拖拉機田間牽引速度,根據紅花采摘工作要求,確定采摘裝置行走速度范圍為2~3 km/h。隨著最長橫弦長度lEE′的增大,采摘裝置轉速不斷增大,梳齒在高速旋轉下對花球機械損傷較大,因此以梳齒到達采摘點后反向行進15 mm為設計要求,即lEE′=15 mm。
基于公式(1)、(2)和對梳齒運動軌跡的分析,在lEE′=15 mm的條件下求得行走速度為2、2.5、3 km/h時所對應的轉速分別為120、150、195 r/min,滿足梳夾采摘設計要求。在軟件中對3種不同運動參數下梳齒的運動軌跡進行擬合,如圖7所示。

圖7 3種工作參數下的梳齒運動軌跡Fig.7 Movement track of comb teeth under three parameters
將采摘裝置安裝至固定高度,以梳齒與花球接觸為采摘條件,花球位置高于梳齒回轉中心時梳齒與花絲難以接觸,如圖8所示,以梳齒水平為采摘高位置,梳齒旋轉60°為采摘低位置,作為分析采摘高度對分枝及花球運動姿態影響的采摘點。

圖8 花球采摘位置Fig.8 Flower ball picking position
通過以上分析,虛擬采摘分別按照表1所示進行試驗。
(1)高位置采摘試驗結果
由圖9~11可看出,梳齒與花球接觸后,在梳齒的沖擊作用下,花球及分枝偏離自然狀態而發生擺動和扭轉,花球由高位置被梳齒齒頂壓至低位置,分枝形變較大,隨著轉速增大,其扭轉幅度也相應增大,在垂直和橫向方向擺動顯著,梳齒與花球接觸的時間減少,花球振幅增大;同時梳齒與分枝發生碰撞為點-面接觸,梳齒沿著花球表面滑動直至與梳齒分離,在整個采摘過程中梳齒與花球上表面(花絲位置)無接觸,即花球長期處于自由擺動狀態導致花絲無法喂入梳齒。

表1 虛擬采摘試驗設置Tab.1 Virtual picking test setting

圖9 v=2.0 km/h,n=120 r/min,高位置采摘虛擬過程Fig.9 High position picking (v=2.0 km/h, n=120 r/min)

圖10 v=2.5 km/h,n=150 r/min,高位置采摘虛擬過程Fig.10 High position picking (v=2.5 km/h, n=150 r/min)

圖11 v=3.0 km/h,n=195 r/min,高位置采摘虛擬過程Fig.11 High position picking (v=3.0 km/h, n=195 r/min)
(2)低位置采摘試驗結果
由圖12~14可以看出,在低位置采摘時,花球與梳齒接觸后分枝在梳齒的沖擊碰撞作用下彎曲,隨著轉速的增大分枝撓度也相應增加,花球及分枝的運動規律比較穩定,在整個采摘過程中花球沿著梳齒的表面滑動,梳齒與花球的上表面無接觸,直至梳齒將花球彈開,分枝出現小范圍扭轉,梳齒間均無花絲喂入。
通過以上分析,在無限位桿時,高位置與低位置采摘時梳齒與花球均發生彈性碰撞,梳齒從與花球接觸至將花球彈開,梳齒與花絲無接觸,即花絲無法喂入梳齒。高位置采摘隨著轉速增大,分枝扭轉幅度大,分枝及花球的運動規律愈加復雜,花球位置不確定,不利于花絲的采摘,同時梳齒與花球接觸后到達理想采摘位置的用時較長,采摘過程易受外界因素干擾,如風載,即在高位置采摘時采摘效率低,采摘過程不穩定。與高位置采摘相比,在梳齒采摘范圍內采摘位置越低花球及分枝運動姿態愈加穩定,分枝扭轉現象基本消除,其花球在自由狀態到理想采摘位置的行程較短,不易受外界因素干擾,采摘過程穩定,更易于限位桿實現限位作用。

圖12 v=2.0 km/h,n=120 r/min,低位置采摘虛擬過程Fig.12 Low position picking (v=2.0 km/h, n=120 r/min)

圖13 v=2.5 km/h,n=150 r/min,低位置采摘虛擬過程Fig.13 Low position picking (v=2.5 km/h, n=150 r/min)

圖14 v=3.0 km/h,n=195 r/min,低位置采摘虛擬過程Fig.14 Low position picking (v=3.0 km/h,n=195 r/min)
3.2 有限位桿采摘過程
通過3.1節分析,為增加設計的可靠性,以低位置采摘為設計目標。花絲難以喂入梳齒主要是因為梳齒與花球發生彈性碰撞后花球位置無法固定,因此本節在低位置采摘時增加限位桿,通過調節采摘裝置行走速度、轉速和限位桿位置以期使花球及分枝到達如圖3所示的理想采摘位置。以表1中4、5、6號試驗安排分別模擬有限位桿的采摘過程,限位桿位置固定,結果如圖15所示,3組采摘效果基本相同,在梳齒轉過理想采摘位置時,分枝及花球仍未到達理想采摘位置,花球及分枝首先在限位桿的作用下發生變形,在花球未到達理想采摘位置時,梳齒已遠離理想采摘位置,整個過程中梳齒與花球上表面無接觸,且直徑過大的花球易在梳齒與限位桿之間卡死,產生這種現象的主要原因是梳齒轉速與行走速度之比過大或限位桿作用滯后。

圖15 低位置虛擬采摘結果Fig.15 Results for virtual picking in low position
花球分布密集,行走速度過快易產生漏采現象,過慢影響采摘效率,擬定行走速度v=2.5 km/h。以下主要通過調節梳齒轉速和限位桿位置來確定實現理想采摘的最優采摘參數,以滿足梳夾采摘要求。
3.2.1梳齒轉速調節
基于對虛擬采摘過程的分析,在限位桿位置不變的情況下通過試推法確定轉速以期使梳齒、限位桿以及花球同時到達理想采摘位置。
在限位桿與梳齒回轉中心的水平距離a=30 mm時,通過對采摘過程的動態分析,得出v=2.5 km/h、n=30 r/min時梳齒、限位桿以及花球同時到達理想采摘位置,采摘過程如圖16所示。花球及分枝在限位桿作用下與采摘裝置同向前進,花球在分枝的彈性恢復作用下緊貼在限位桿表面,梳齒旋轉掃過花球上表面并實現花絲喂入,梳齒齒頂是與花絲接觸的主要部分,梳齒長度與采摘效果無關,此時梳齒反向水平位移不影響梳齒間花絲喂入量,即梳齒運動軌跡余擺線的扣環大小對采摘效果沒有影響。在限位桿位置不變的情況下,n=30 r/min時花球可以到達理想采摘位置。
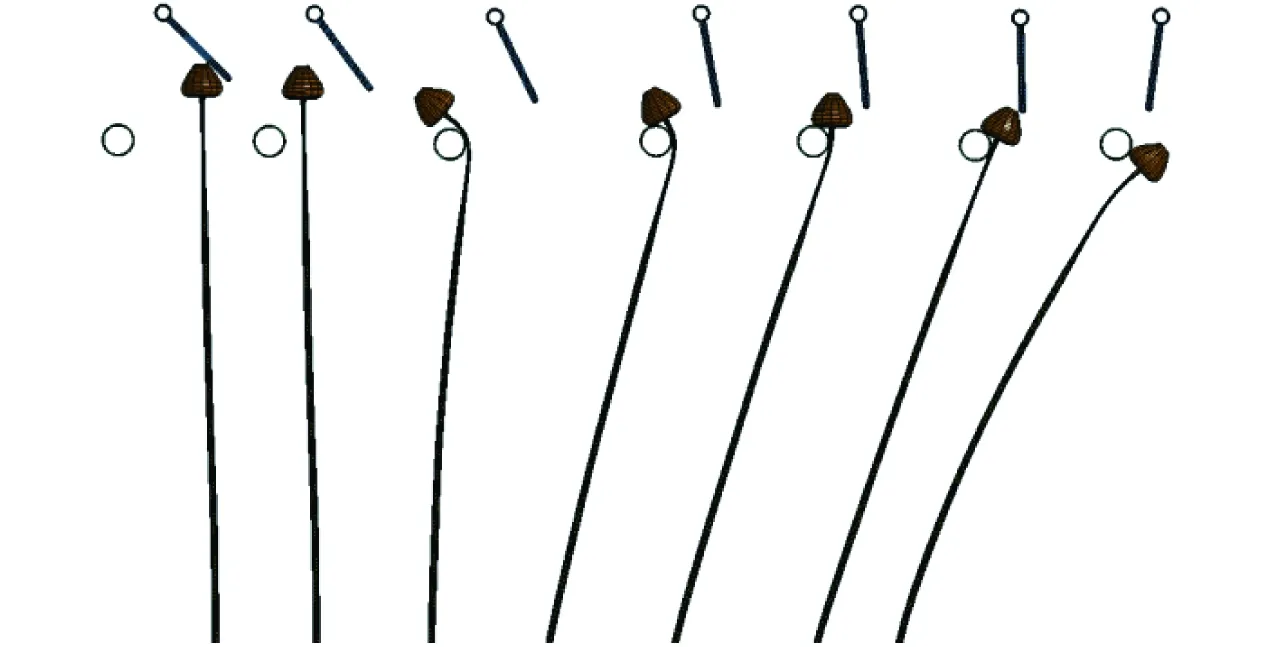
圖16 n=30 r/min虛擬采摘過程 Fig.16 Virtual picking process for n=30 r/min
設Δt為相鄰梳齒轉到采摘位置的時間間隔[21-22],則時間間隔Δt與梳齒排數k、梳齒轉速n滿足
(3)
由式(3)可得,k一定時,梳齒轉速n越大,時間間隔Δt越小。新疆紅花按株距15~20 cm穴栽,取紅花株距15 cm,相鄰花球距離5 cm,為保證不發生漏采,時間間隔Δt、相鄰花球距離l、采摘裝置行進速度v之間應滿足
(4)
根據式(3)、(4),得出Δt≤0.07 s,則不發生漏采的梳齒轉速應滿足
(5)
梳齒轉速n=30 r/min時不發生漏采所要求的梳齒排數過多,受采摘裝置結構設計影響,無法滿足梳夾采摘要求。
3.2.2限位桿位置調節
縮短限位桿與花球的距離可以減少梳齒到達理想采摘位置的時間,即增大了梳齒轉速,從而在不發生漏采的條件下可以減少梳齒排數,滿足結構設計要求,限位桿位置優化流程如圖17所示。
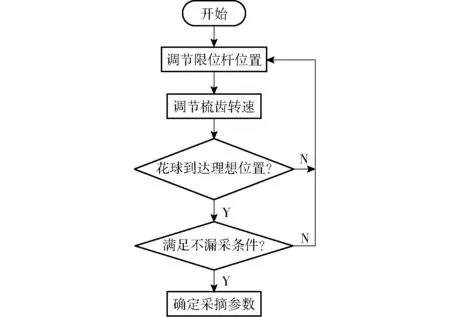
圖17 限位桿位置優化流程圖Fig.17 Flow chart of position optimization of limit rod
限位桿與梳齒相對安裝位置、采摘高度如圖18所示,隨著限位桿從位置1調節到位置3,采摘裝置在相同行走速度下能夠實現理想采摘的梳齒轉速不斷增大,且位置3梳齒轉速增大,此時梳齒轉速n=150 r/min,可實現花絲的理想采摘,采摘過程見圖19。
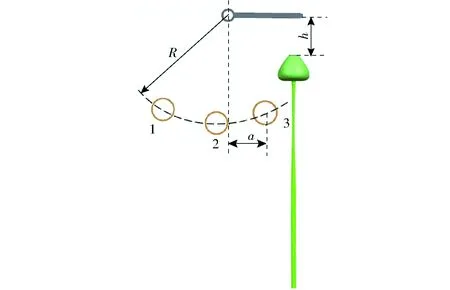
圖18 最優限位采摘位置Fig.18 Optimal position of limit picking

圖19 n=150 r/min虛擬采摘過程Fig.19 Virtual picking process for n=150 r/min
根據式(5),此時不發生漏采所要求的梳齒排數k=6,滿足采摘裝置結構設計要求。當限位桿繼續向前移動時,花球及分枝在限位桿的作用下向下彎曲,遠離梳齒,梳齒與花球無接觸,即位置3為允許采摘的限位桿極限位置。在采摘裝置行走速度2.5 km/h,梳齒轉速n=150 r/min,限位桿與梳齒旋轉中心的水平距離a=30 mm,中心距R=85 mm時,梳夾采摘裝置可以采摘與梳齒相對高度h=30 mm的花球。梳齒由水平位置轉到理想采摘位置的時間為0.07 s,與水平方向夾角60°,轉到結束位置時間為0.08 s,與水平方向夾角70°,即從梳齒開始喂入花絲至梳齒與花絲分離,梳齒轉過的角度為10°。
4 采摘試驗
4.1 試驗臺搭建
4.1.1梳夾采摘裝置
根據虛擬分析結果,確定凸輪的夾緊角為10°,確定凸輪的安裝角,即夾花開始位置與水平夾角為60°。梳齒齒頂是實現花絲采摘的主要工作部分,在齒頂增加彎角以增大梳齒與花絲的有效接觸面積,梳齒彎角在梳齒與花絲接觸后的夾緊過程中發揮作用,梳齒及安裝方向見圖20。

圖20 梳齒及安裝方向Fig.20 Comb teeth and installation direction
梳夾采摘裝置動力選擇ZLG型直流串勵電動機,額定功率1 000 W,最大轉速750 r/min,選擇4個250 W蓄電池供電。電機與直流電機調速器連接,通過無級調速開關控制器調節電機轉速。采摘裝置通過鏈傳動與電動機相連,采摘試驗臺可通過4個支柱實現采摘裝置的升降以適應不同高度紅花的采摘,梳夾式采摘裝置如圖21所示。
4.1.2紅花輸送裝置
輸送裝置由直流電機、帶輪、V型帶、安裝在鏈輪上的運動托板及夾具等組成,夾具是2個呈半圓弧形的定動夾套構成一組,半圓弧形動夾套依靠可調螺栓調節夾套的開度以適應不同直徑的紅花植株,從而保證莖稈的直立度,通過調節電機速度控制器的擋位控制帶輪的旋轉速度以模擬紅花采摘機的進給速度,紅花輸送裝置見圖22。

圖21 梳夾式采摘裝置Fig.21 Combed picking device1.直流電動機 2.鏈條 3.鏈輪 4.支柱 5.限位桿 6.梳齒 7.蓄電池 8.直流電機調速器 9.開關控制器
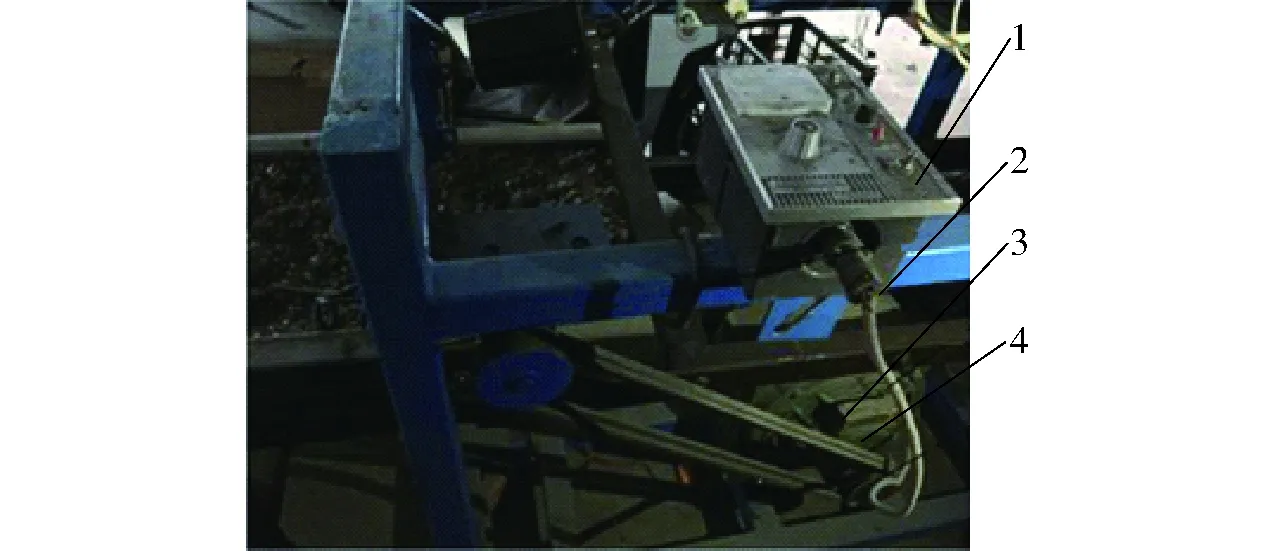
圖22 紅花輸送裝置Fig.22 Saffolwer conveyor1.直流電機調速器 2.運動托臺 3.直流電機 4.帶輪
4.2 采摘試驗結果
紅花輸送裝置行走速度設定為2.5 km/h,梳齒轉速設定為150 r/min,限位桿與梳齒旋轉中心的水平距離a=30 mm,中心距R=85 mm,選取開花3~6 d紅花進行采摘試驗,取30組紅花作為試驗樣本,分別觀察30組采摘過程中花球及分枝的運動姿態以及采摘效果。定義采凈率為單朵花球上被梳夾采摘裝置采摘下來的紅花質量與單朵花球上紅花總質量的百分比,其計算公式為[23]
(6)
式中m1——梳齒采摘紅花質量,g
m2——花球上殘留的紅花質量,g
通過對采摘過程的分析可知,由于自然生長狀態下的紅花分枝的物料特性略有不同,在梳齒和限位桿的共同作用下,部分分枝并沒有在限位桿的作用下繼續前行,而是直接側向彎曲,偏離采摘軌跡;同時由于花球大小不同,少數直徑過大的花球出現卡死現象,直徑過小的花球在齒頂的作用下扭轉一定角度,遠離齒頂。在所測樣本中,其中5%花球出現卡死現象,20%的花球扭轉并偏離梳齒齒頂采摘位置,75%的梳齒、限位桿及紅花可以同時到達理想采摘位置,在到達理想采摘位置的花球中,由于花絲比較柔軟,15%的花球上的花絲被齒頂擠壓在花球表面,梳齒間僅有極少數花絲可以喂入。因此56%的花球可以實現理想采摘,其中平均采凈率為48.5%,所采摘花絲完好無破損,驗證了理論設計。無限位桿和有限位桿采摘效果見圖23。
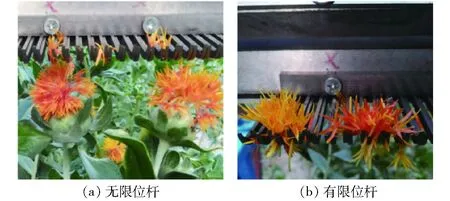
圖23 采摘效果Fig.23 Picking effect
5 結論
(1)隨著梳齒轉速增高,高位置采摘分枝擺動及扭轉幅度增大,運動規律復雜,低位置時花球和分枝運動穩定,擺動幅度減小,扭轉現象不明顯;無限位桿時,在梳齒的沖擊作用下花球發生接觸碰撞,分枝彎曲且花球自由擺動,花絲難以喂入梳齒。
(2)采摘部位為梳齒齒頂,其結構參數對梳齒間花絲喂入量具有重要影響。行走速度2.5 km/h,梳齒轉速150 r/min,限位桿與梳齒旋轉中心的水平距離a=30 mm,中心距R=85 mm時,與梳齒相對高度h=30 mm的花球可實現理想采摘,梳齒喂入花絲時與水平方向的夾角為60°。
(3)采摘試驗結果表明,56%的花球可以實現理想采摘,其中平均采凈率為48.5%,所采摘花絲完好無破損,可實現固定高度花絲的采摘,仍有大量花球不能到達理想采摘位置,每個花球上的花絲在一次采摘過后并沒有完全采凈,仍有部分殘留,梳齒和限位桿的結構尚需改進。
