行星輪栽植機構優化設計與試驗
2018-12-04 09:03:30胡建平張晨迪張思偉費衛征潘浩然
農業機械學報 2018年11期
關鍵詞:作業
胡建平 潘 杰 張晨迪 張思偉 費衛征 潘浩然
(江蘇大學現代農業裝備與技術教育部重點實驗室, 鎮江 212013)
0 引言
蔬菜生產是一項勞動密集型產業,人工勞動強度大,制約了蔬菜產業的發展。蔬菜育苗移栽是蔬菜生產的主要方式,實現蔬菜自動化移栽已成為農業生產的迫切需求和未來發展的必然趨勢[1-2]。栽植機構是自動移栽機的核心工作部件之一,不論是由人工將苗缽投入栽植嘴進行移栽作業的半自動移栽機械,還是能同時自動完成取苗和植苗動作的全自動移栽機械,均需要一套栽植機構來完成最終的植苗動作。作為將穴盤苗植入大田的直接作業機構,栽植機構的性能直接決定著穴盤苗的移栽立苗率和移栽機整機性能[3-4]。
常見的栽植機構有鉗夾式、撓性圓盤式、導苗管式、吊籃式、鴨嘴式等。鉗夾式、撓性圓盤式、導苗管式需配合開溝器使用,與我國蔬菜起壟種植的農藝要求不符[5]。吊籃式和鴨嘴式可直接進行壟上打穴移栽,但吊籃式栽植機構結構復雜,體積龐大,多用于國外大型農場[6]。
日本的洋馬公司最早研制出行星輪-滑道式栽植機構,作業時鴨嘴在行星輪系和滑道的共同作用下,按照設計的軌跡和姿態打穴移栽,將缽苗植入土中。該栽植機構受滑道限制,只能安裝一個栽植器,且行星輪的轉速不能過快,限制了該栽植機構的作業效率[7]。胡建平等[8-9]提出一種行星輪多轉臂式栽植機構,以行星輪單轉臂為對象,仿真分析了在不同特征參數λ下的前、后鴨嘴末端運動軌跡及缽苗栽植狀態,得到了缽苗直立度較好的λ值,但未對栽植機構主要參數進行優化。金鑫等[10]以缽苗栽植過程中位于栽植器內的運動階段為優化目標,對缽苗運動過程動力學模型進行優化,得出了栽植器最佳初始位置及結構參數,但未對栽植軌跡進行優化。俞高紅等[11]設計了行星輪系旋轉式栽植機構,構建了一種能夠滿足大株距移栽作業軌跡的非圓齒輪傳動比函數,通過人機交互方法優化出一組符合要求的較優機構參數,但其僅針對單一株距。
針對不同作物移栽時的不同株距問題,本文在前期研究基礎上,以行星輪轉臂式栽植機構為研究對象,建立栽植機構的運動學模型。通過對栽植機構前后栽植點軌跡的理論研究,由計算機輔助分析進行機構參數優化,得出一組能夠適用于自走式多行移栽機、滿足多株距移栽要求的栽植機構參數。并進行田間植苗驗證試驗,以改善行星輪轉臂式栽植機構栽植性能,提高其適用性及通用性。
1 移栽機栽植機構結構與工作原理
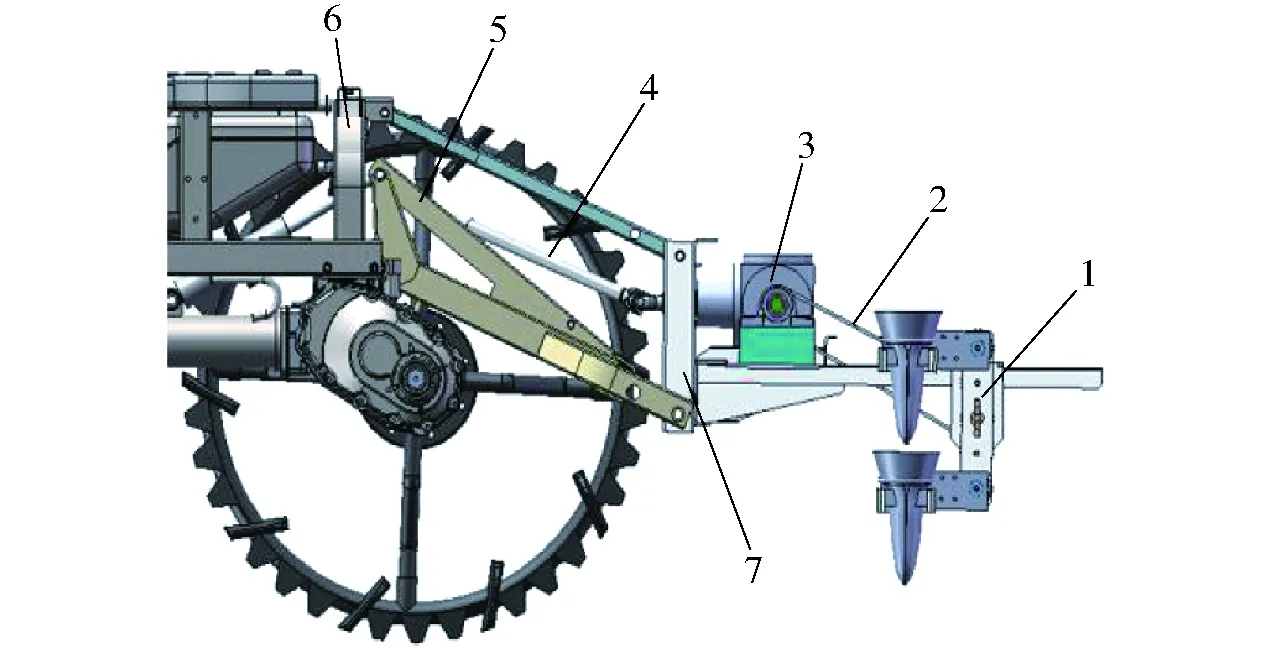
圖1 栽植部件傳動方案Fig.1 Transmission method of planting device1.栽植單體 2.鏈傳動機構 3.T型減速機 4.底盤動力輸出軸 5.液壓提升裝置 6.底盤架 7.栽植支架
自走式移栽機行星輪轉臂式栽植機構的動力傳輸如圖1所示。主要由底盤動力輸出軸、T型減速機、鏈傳動機構等組成;作業時,栽植機構隨移栽機整體向前運動,底盤發動機動力由動力輸出軸經T型減速機由鏈傳動機構傳遞至栽植單體帶動栽植機構轉動,帶動栽植鴨嘴在土里打穴移栽,將穴盤苗植入田中。
每組栽植單體可實現兩行蔬菜移栽,通過組合栽植單體可實現多行作業;底盤液壓提升裝置可以實現栽植部件升降,可根據壟高調節栽植部件整體高度以保證移栽深度,使移栽機能夠適應不同壟高及平地移栽。
行星輪轉臂式栽植機構結構如圖2所示,主要由行星輪轉臂平動機構和鴨嘴開合機構2部分組成。行星輪轉臂平動機構主要包括行星輪驅動部件、行星架和栽植臂,其中行星輪驅動部件由一個中心輪、兩組對稱的惰輪和行星輪組成;鴨嘴開合機構主要包括鴨嘴式栽植器、凸輪、頂桿、滑槽、后轉板和前轉板,其中鴨嘴式栽植器由前鴨嘴、后鴨嘴、前鴨嘴固定板、后鴨嘴固定板、接苗斗和拉簧組成。
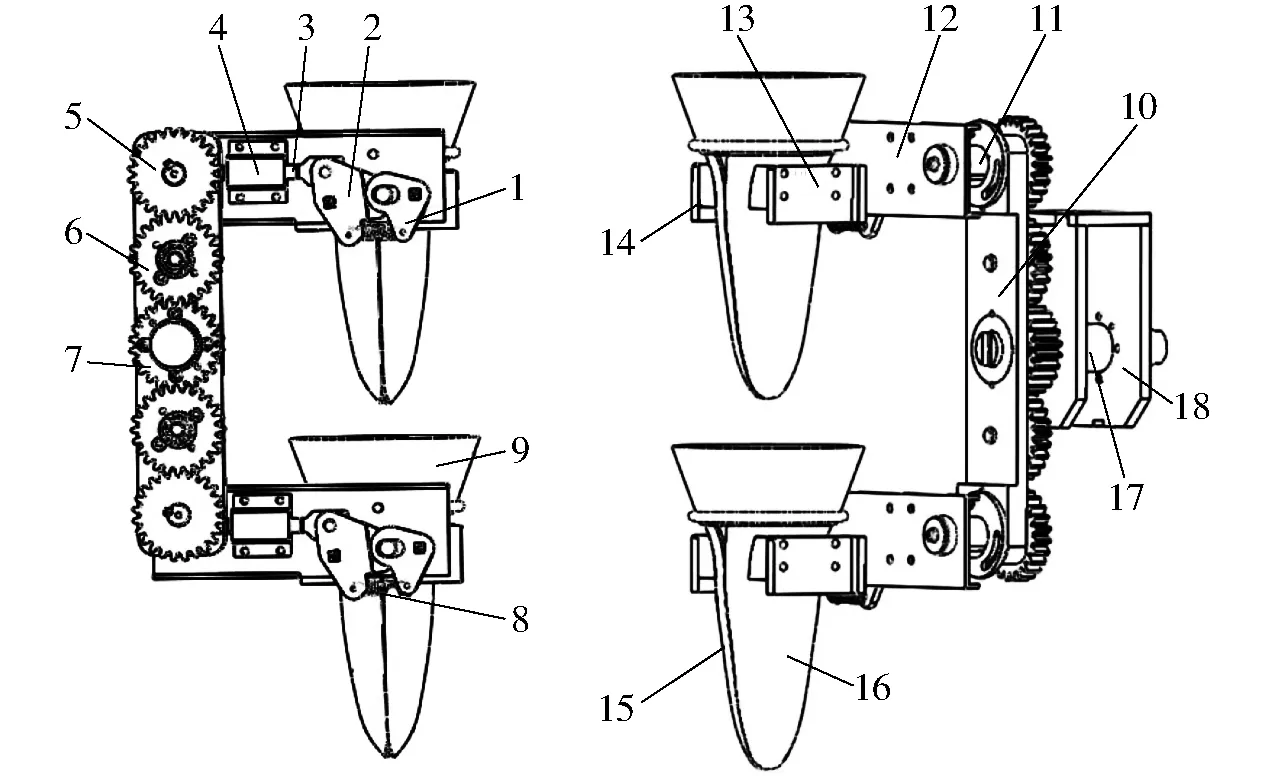
圖2 栽植機構結構圖Fig.2 Structure diagram of planting mechanism1.前轉板 2.后轉板 3.頂桿 4.滑槽 5.行星輪 6.惰輪 7.中心輪 8.拉簧 9.接苗斗 10.行星架 11.凸輪 12.栽植臂 13.后鴨嘴固定板 14.前鴨嘴固定板 15.前鴨嘴 16.后鴨嘴 17.中心輪軸 18.固定架
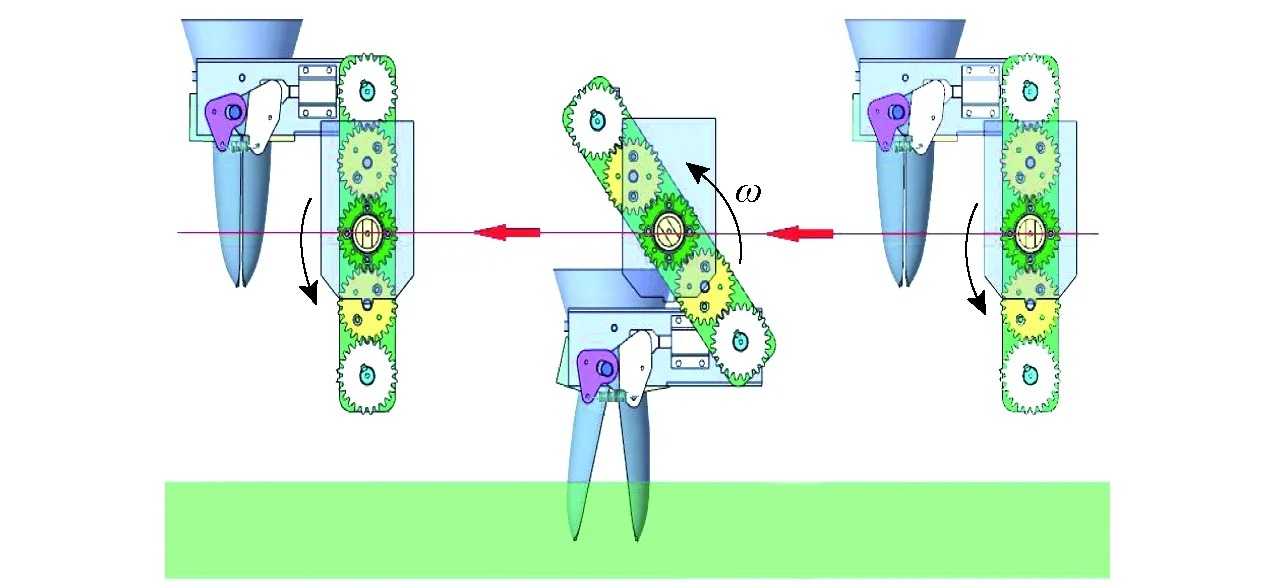
圖3 栽植機構作業過程Fig.3 Working process of planting mechanism
作業時,栽植機構隨移栽機整體向前運動,底盤動力經分動箱由鏈傳動傳遞至從動鏈輪的中心輪軸帶動行星架轉動,帶動惰輪和行星輪嚙合轉動,惰輪與中心輪軸同向轉動,行星輪反向轉動。作業過程如圖3所示,由于齒輪嚙合作用,行星輪帶動安裝在其轉軸上的栽植臂一起繞中心輪中心轉動,且栽植臂始終保持水平;行星架帶動凸輪繞其旋轉中心轉動,與頂桿擠壓碰撞推動頂桿按一定運動規律移動,進而推動后轉板帶動后鴨嘴轉動,后轉板推動前轉板帶動前鴨嘴轉動,實現鴨嘴的打開動作,且鴨嘴打開時,前后鴨嘴末端應位于同一水平線,拉簧的彈力保證頂桿和凸輪始終接觸,實現鴨嘴的閉合回位。如此循環動作,實現鴨嘴的循環開合,完成鴨嘴栽植器打穴、移栽作業。
2 行星輪轉臂式栽植機構運動學模型
2.1 理論模型
由于栽植機構兩組轉臂的結構及運動規律相同,因此取其中一組轉臂進行建模分析。由栽植機構結構原理可知,其由行星輪轉臂平動機構和鴨嘴開合機構兩部分組成,其機構簡圖如圖4所示。
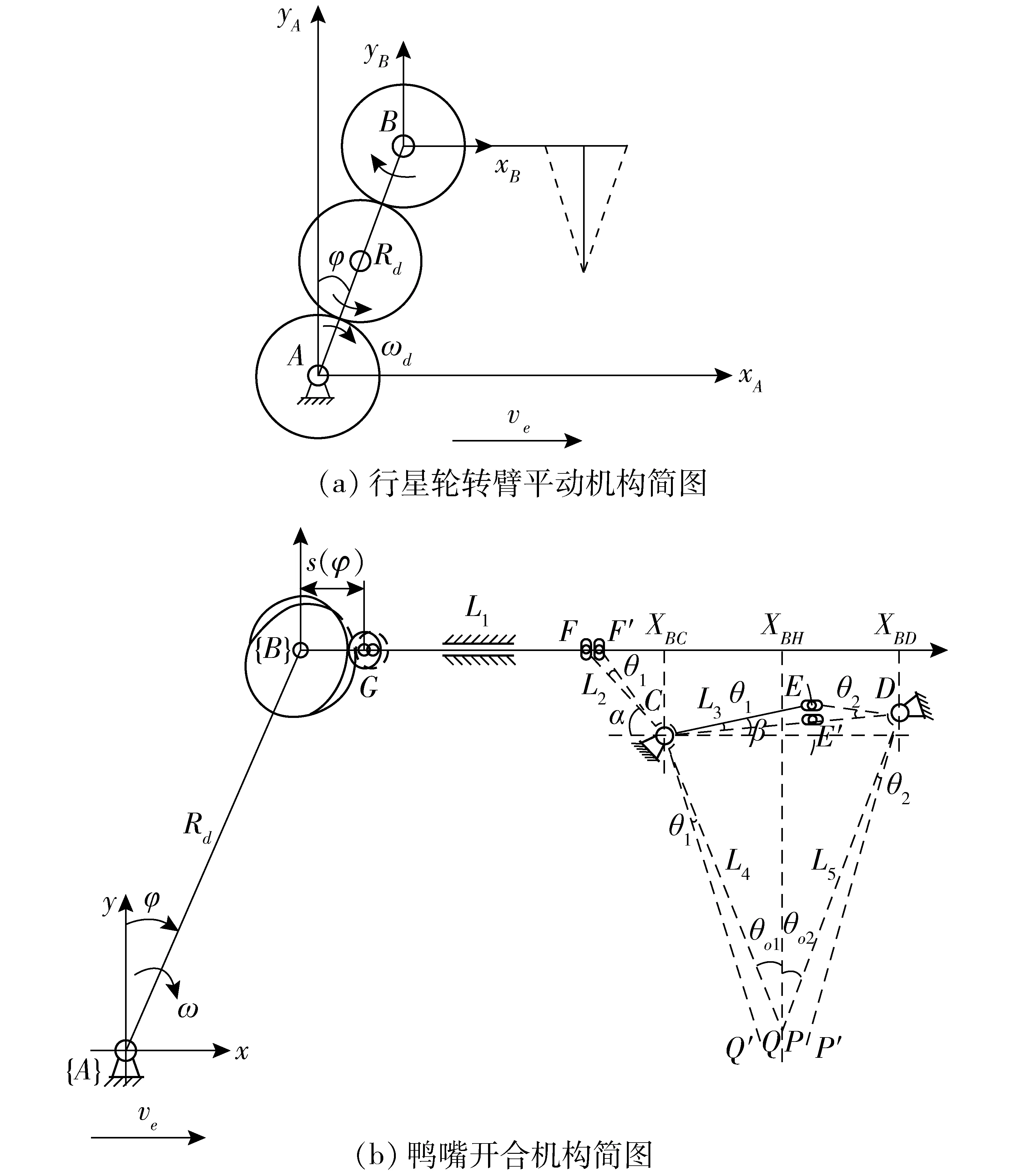
圖4 栽植機構簡圖Fig.4 Schematics of planting mechanism
圖4a為行星輪轉臂平動機構簡圖,A為以中心輪中心為原點的坐標系,其固連在固定架上,隨底盤向前運動;B為以行星輪中心為原點的坐標系,其整體繞A旋轉,行星架AB為原動件。圖4b為鴨嘴開合機構簡圖,即B坐標系圖,凸輪固接于行星架上隨其轉動;C點為后鴨嘴轉軸中心,D點為前鴨嘴轉軸中心;E、F為前、后兩轉板鉸接點位置,將其與后鴨嘴轉軸C點間關系簡化為桿CE、CF,P、Q為前后鴨嘴栽植點[12-13]。
當移栽機向前行駛時,底盤動力由鏈傳動帶動行星架AB順時針轉動,帶動鴨嘴開合機構即B坐標系整體繞A坐標系轉動;凸輪隨行星架AB轉動角度φ后產生推程推動頂桿FG平動,從而推動后鴨嘴部件ECFQ繞C點轉動,進而在E點滑槽作用下帶動前鴨嘴部件EDP繞D點轉動,使前后鴨嘴兩栽植點P、Q作開合運動,完成栽植動作。
2.2 運動數學模型
如圖4,以中心輪中心為原點建立A坐標系,以行星輪中心為原點建立B坐標系,移栽機前進方向與x軸正向相同。令xB表示參數在B坐標系中的x方向分量表達式,yB表示參數在B坐標系中的y方向分量表達式,通過建立栽植器前后鴨嘴栽植點P、Q運動數學模型,來優化栽植機構結構參數。在B坐標系中,當前后鴨嘴CQ、DP位于初始位置時,Q、P重合,可求得
(1)
式中θo1——初始位置后鴨嘴CQ與豎直線夾角,(°)
θo2——初始位置前鴨嘴DP與豎直線夾角,(°)
xBH——前后鴨嘴閉合時的重合點H位于xB軸上的坐標值
xBC——C點位于xB軸上的坐標值
xBD——D點位于xB軸上的坐標值
L4——后鴨嘴末端點至后鴨嘴轉軸中心的距離,mm
L5——前鴨嘴末端點至前鴨嘴轉軸中心的距離,mm
為使栽植點位于栽植器中間,則XBH為XBCXBD中點,可求得
(2)
可求得
(3)
當行星架AB轉動使凸輪頂桿推動ECFQ轉動θ1角至E′CF′Q′位置、EDP轉動θ2角至E′DP′位置時,由
(4)
式中α——初始位置CF與水平線夾角,(°)
s(φ)——滾子G的運動規律與某時刻行星架轉過的角位移φ的關系函數
L1——FG的長度,mm
L2——CF的長度,mm
可求得
(5)
由LCE=LCE′=L3(LCE、LCE′表示CE、CE′的長度),可求得
(6)
式中LEE′——EE′的長度,mm
E點的位移坐標方程為
(7)
式中xBE——E點位于xB軸上的坐標值
yBE——E點位于yB軸上的坐標值
β——初始位置CE與水平線夾角,(°)
E′點的位移坐標方程為
(8)
式中xBE′——E′點位于xB軸上的坐標值
yBE′——E′點位于yB軸上的坐標值
由式(7)、(8)可求得EE′的長度,由D點坐標(xBD,yBD)可求得DE、DE′的長度LDE、LDE′。
由公式
(9)
可求得
(10)
則P點在B坐標系中的位移坐標方程為
(11)
式中xBP——P點位于xB軸上的坐標值
yBP——P點位于yB軸上的坐標值
Q點在B坐標系中的位移坐標方程為
(12)
式中xBQ——Q點位于xB軸上的坐標值
yBQ——Q點位于yB軸上的坐標值
若移栽機前進速度為ve,行星架旋轉角速度為ωd,則B點的絕對運動軌跡方程為
(13)
式中xB——B點位于x軸上的坐標值
yB——B點位于y軸上的坐標值
Rd——行星架旋轉半徑,即行星輪與中心輪旋轉中心的距離,mm
則前后鴨嘴栽植點P、Q的絕對運動軌跡方程為
(14)
(15)
根據以上幾何關系及P、Q點軌跡方程,利用Matlab對該數學模型進行編程,建立其分析程序模型,將一個運動周期分解為若干個時刻點,求解出前后鴨嘴栽植點(P、Q)在每個時刻點的坐標值,擬合為運動軌跡曲線輸出,并用圖形表示出來。
3 主要參數對栽植機構運動特性影響分析
根據所建立數學模型,基于Matlab GUI設計了計算機輔助優化設計人機交互界面,如圖5所示。該界面主要包括凸輪滾子運動規律調入區、參數初值輸入區、軌跡分析區、運動軌跡區、軌跡對比區、實時參數返回區和參數組合寄存區等。該優化設計界面通過可視化設計,將行星輪轉臂式栽植機構前后鴨嘴栽植點的運動軌跡實時展現在設計者面前[14-16],綜合考慮幾何關系及布置空間,以栽植機構Rd、L3、β、L4為變量參數。結合缽苗葉冠直徑及實際作業工況,初選一組結構參數L1=83 mm,L2=22 mm,L3=38 mm,L4=145 mm,Rd=120 mm,α=82°,β=8°,C(105,-22),D(165,-17),分別在3個適應于大多數蔬菜的株距下,分析變量參數對栽植軌跡的影響趨勢,由此通過人機交互逐步調節設計參數,使栽植軌跡達到作業要求[17-18]。
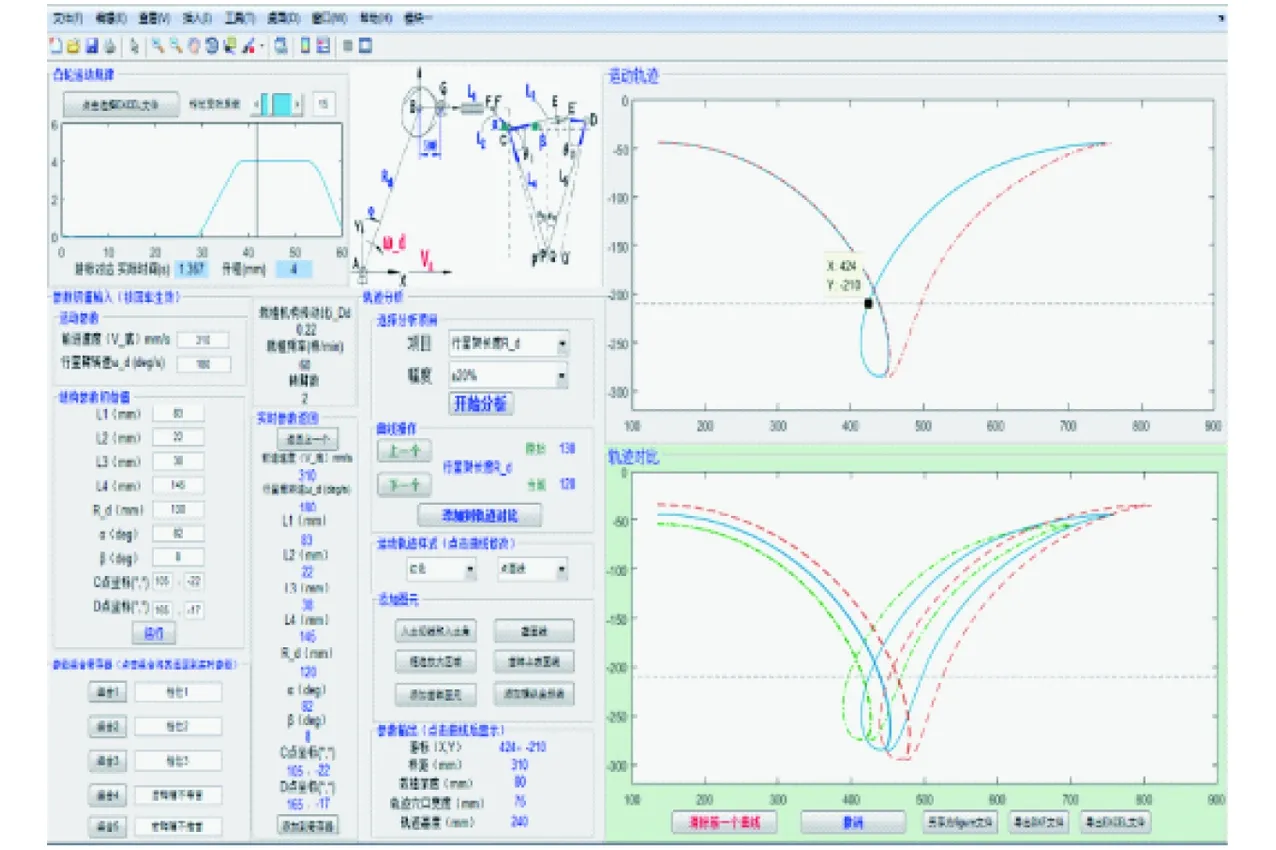
圖5 輔助優化工具人機交互界面Fig.5 Human-computer interaction interface
3.1 行星架旋轉半徑Rd對栽植軌跡的影響
對比圖6中的栽植軌跡可以看出,特征參數λ一定時,隨著行星架旋轉半徑Rd的增大,后鴨嘴形成的環扣形狀變大,后鴨嘴避苗空間變大,且前鴨嘴軌跡向環扣靠攏,前鴨嘴的避苗空間減小;前后鴨嘴軌跡與壟面交點尺寸變化不大,對軌跡形成的穴口影響不大;隨著Rd的增大,栽植軌跡逐漸向下向右偏移,栽植深度逐漸增大。在保證栽植深度一定時,Rd越小則軌跡輪廓高度越小,且實際作業時支架距壟面過低會在壟面上推土。綜上分析,行星架旋轉半徑Rd尺寸的選取需要充分考慮栽植鴨嘴尺寸、前后避苗空間和實際作業安裝位置的需求。
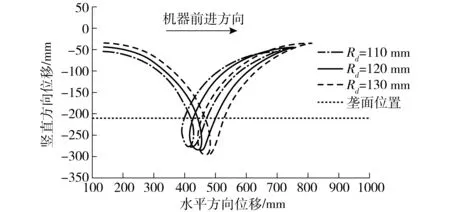
圖6 行星架旋轉半徑與栽植軌跡的關系Fig.6 Relationship between radius of rotation of planet frame (Rd) and planting trajectory
3.2 后鴨嘴擺桿CE長度L3對栽植軌跡的影響
在中間株距310 mm下分析CE長度L3對栽植軌跡的影響,如圖7所示。移栽頻率f為60株/min(即ωd=π rad/s)時,行走速度ve=310 mm/s,其他結構及位置參數選定為:L1=83 mm,L2=22 mm,L4=145 mm,Rd=120 mm,α=82°,β=8°,C(105,-22),D(165,-17)。
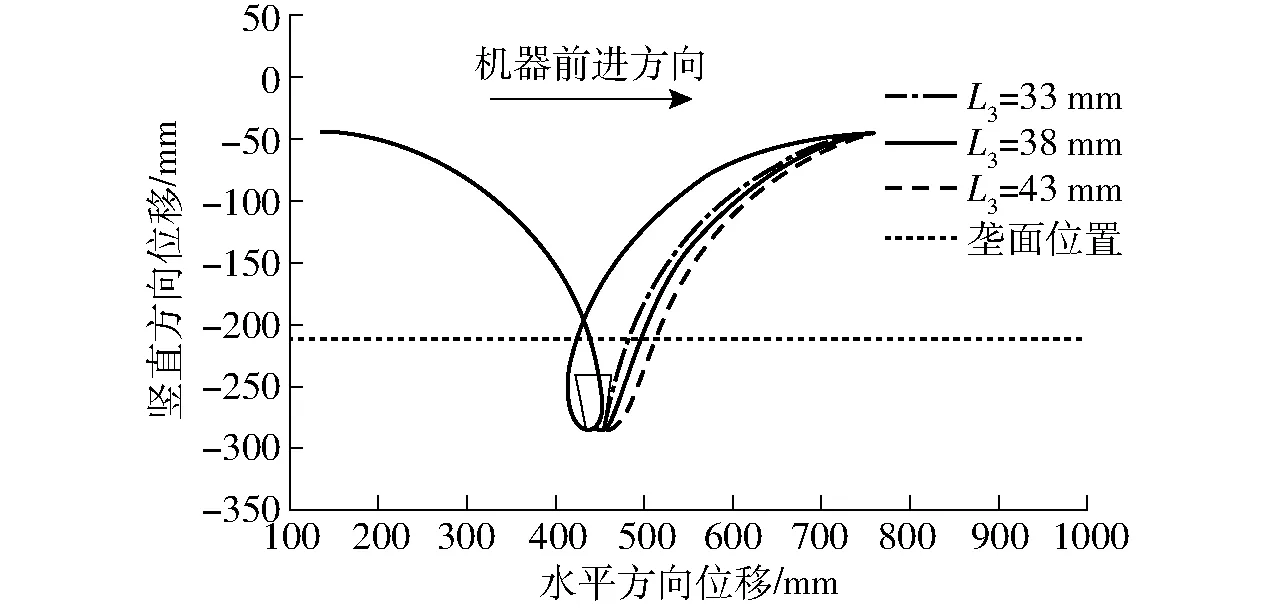
圖7 CE長度與栽植軌跡的關系Fig.7 Relationship between length of CE (L3) and planting trajectory
對比圖7中的栽植軌跡可以看出,隨著L3的增大,前鴨嘴的運動開合幅度增大,即前鴨嘴的避苗空間增大,可通過適當增大L3來消除由前鴨嘴避苗空間不足導致前鴨嘴對苗缽的掛帶現象;但隨著L3的增大,前后鴨嘴軌跡在壟面處形成的穴口尺寸增大,因此在滿足前鴨嘴避苗空間的前提下,L3的取值應盡量小。綜上分析,L3的變化主要影響前鴨嘴的運動軌跡,對后鴨嘴運動所形成的環扣形狀沒有影響,L3的選取應充分考慮前鴨嘴避苗空間和穴口尺寸的大小。
3.3 CE初始位置與水平線夾角β對栽植軌跡的影響
在中間株距310 mm下分析CE初始位置與水平線夾角β對栽植軌跡的影響,如圖8所示。移栽頻率f為60株/min(即ωd=π rad/s)時,行走速度ve=310 mm/s,其他結構及位置參數選定為:L1=83 mm,L2=22 mm,L3=38 mm,L4=145 mm,Rd=120 mm,α=82°,C(105,-22),D(165,-17)。

圖8 β與栽植軌跡的關系Fig.8 Relationship between value of β and planting trajectory
對比圖8中的栽植軌跡可以看出,β對栽植軌跡的影響與L3相反;隨著β的增大,前鴨嘴的運動開合幅度減小,即前鴨嘴的避苗空間減小,可通過適當減小β來消除由前鴨嘴避苗空間不足導致前鴨嘴對苗缽的掛帶現象;但隨著β的減小,前后鴨嘴軌跡在壟面處形成的穴口尺寸增大,因此在滿足前鴨嘴避苗空間的前提下,β的取值應盡量大。綜上分析,β的變化主要影響前鴨嘴的運動軌跡,對后鴨嘴運動所形成的環扣形狀沒有影響,β的選取應充分考慮前鴨嘴避苗空間和穴口尺寸的大小。
3.4 后鴨嘴末端點至鴨嘴轉軸中心距離L4對栽植軌跡的影響
在中間株距310 mm下分析后鴨嘴末端點至鴨嘴轉軸中心距離L4對栽植軌跡的影響,如圖9所示。移栽頻率f為60株/min(即ωd=π rad/s)時,行走速度ve=310 mm/s,其他結構及位置參數選定為:L1=83 mm,L2=22 mm,L3=38 mm,Rd=120 mm,α=82°,β=8°,C(105,-22),D(165,-17),對比圖9中的栽植軌跡可以看出,隨著L4的增大,栽植軌跡相對旋轉中心安裝位置逐漸向下;前后鴨嘴的開合距離均變大,總的開合變大,且前后鴨嘴軌跡在壟面處形成的穴口尺寸增大;在行星架旋轉半徑Rd一定時,L4過大會使兩栽植鴨嘴干涉,L4過小會使鴨嘴末端點與旋轉中心安裝架距離較小,作業時栽植支架與壟面距離過近會影響作業效果。L4尺寸的選取決定著栽植鴨嘴的尺寸,鴨嘴尺寸需滿足栽植深度要求,其取值應充分考慮穴盤苗的尺寸、開合距離、栽植深度和實際作業安裝位置的需求。
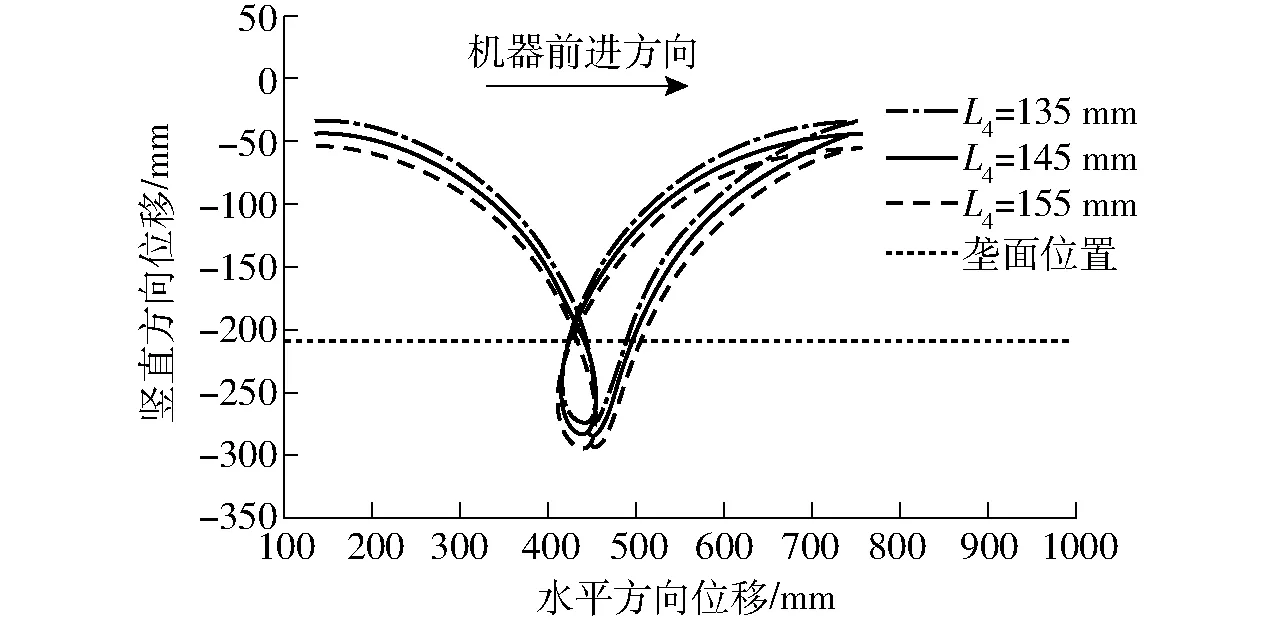
圖9 L4與栽植軌跡的關系Fig.9 Relationship between length of L4 and planting trajectory
4 參數優選
通過以上分析,得到各變量參數對前后栽植點軌跡曲線的影響趨勢。為使栽植機構能滿足3種株距下的較高直立度要求,保證穴盤苗的栽植質量,在確定栽植機構參數時應滿足以下優化目標:
(1)后鴨嘴軌跡在最低處應形成環扣,且環扣高度應大于苗缽高度。
(2)后鴨嘴軌跡回程要有向上趨勢,避免太過向前與苗缽干涉使苗缽前傾。
(3)前鴨嘴軌跡回程要有向前趨勢,避免向后推苗。
(4)前后鴨嘴軌跡與壟面交點處形成的穴口尺寸較小。
(5)軌跡整體高度要遠大于穴盤苗高度,以防鴨嘴拖苗、壓苗,軌跡高度應大于200 mm。
(6)鴨嘴長度應適當大于穴盤苗的高度且兩轉臂鴨嘴間不能干涉[19]。
通過以上分析,得到各參數對前后栽植點軌跡曲線的影響趨勢,并結合優化目標,對栽植機構參數進行優化。首先由經驗初步設定各個參數的初始值,然后根據得到的各參數對栽植點軌跡的影響趨勢,不斷調整各參數數值,尋找符合優化目標要求的運動軌跡。綜合考慮各組軌跡的優劣,最終通過人機交互優選出一組較優參數組合為:L1=83 mm,L2=22 mm,L3=38 mm,L4=145 mm,Rd=120 mm,α=82°,β=8°,C(105,-22),D(165,-17)。
在3種株距下由該組參數得到的栽植軌跡如圖10所示。圖中虛線為穴盤苗投苗時在豎直方向的位置,實線為植苗后穴盤苗定植的位置。由圖中可測出穴盤苗的栽植傾角。由圖可以看出,在3個栽植擋位下,前鴨嘴均不帶苗,在株距280 mm和株距310 mm下,后鴨嘴的運動軌跡在植苗段形成環扣,且環扣高度大于苗缽高度。前后鴨嘴避苗空間充足,穴盤苗的栽植傾角為0°,滿足直立度要求。在株距345 mm時,后鴨嘴軌跡形成的環扣形狀減小,后鴨嘴軌跡回程與穴盤苗豎直位置發生輕微干涉,產生回帶苗現象使穴盤苗前傾。當穴盤苗完全脫離后鴨嘴被定植時,由圖可測得穴盤苗栽植傾角為3°,可知該組結構參數能夠滿足3種株距下移栽作業的直立度要求。
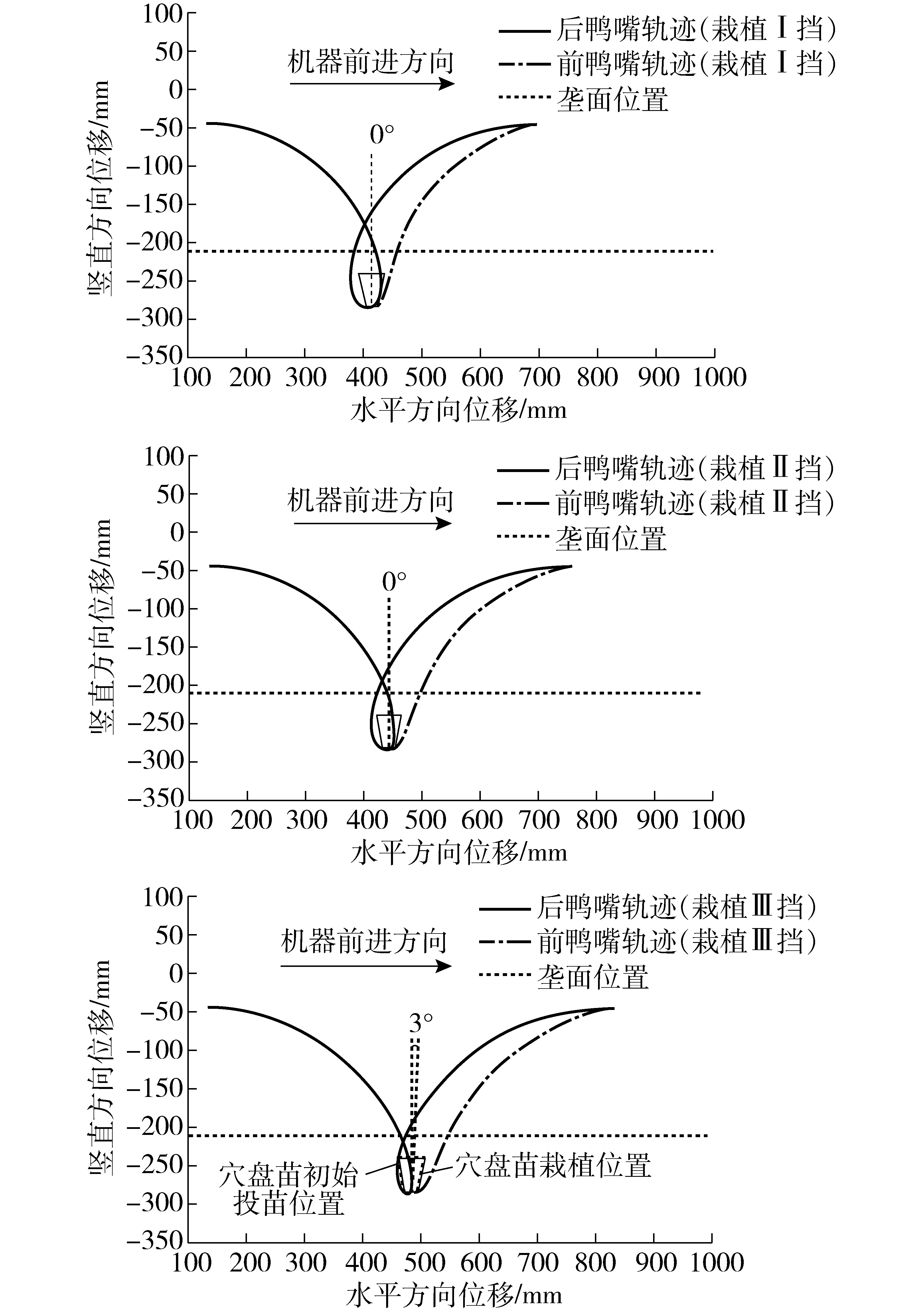
圖10 不同株距下的栽植軌跡Fig.10 Trajectory under different planting distances
5 試驗結果與分析
試制樣機實物及試驗效果如圖11所示,對栽植機構進行田間試驗,以進一步驗證其實際栽植情況。田間試驗選擇沙壤土進行,事先用拖拉機帶動旋耕裝置進行松耕,松耕后土壤平均碎土率不小于60%,含水率不大于20%,松耕深度不低于200 mm。隨后用起壟機進行開溝起壟,壟寬為1 100 mm,壟高為200 mm,溝寬為300 mm,起壟后壟面平整,無雜草及碎石等障礙物;田壟0~200 mm土層平均含水率為16.2%,平均緊實度為12.7 N/cm2。選用72孔穴盤培育的黃瓜苗為試驗對象,苗齡為35 d左右,穴盤苗平均高度126.42 mm,平均質量20.58 g,苗缽含水率60%左右,育苗基質配比為草炭、蛭石、珍珠巖體積比為3∶1∶1。

圖11 試驗樣機Fig.11 Prototypes for testing
整機田間試驗時,自走式移栽機的行走輪在溝底行走,栽植機構在壟面上作業,控制栽植鴨嘴的栽植深度為80 mm;根據實際壟長,每組移栽2盤共144株蔬菜苗。測試不同栽植頻率時3個擋位株距下的栽植性能,統計田間數據時將前后24株蔬菜苗去除,測量中間120株區域的栽植狀態,結果如表2所示。
試驗時測量穴盤苗間的株距,計算其標準差和平均值
得株距變異系數
SX——株距標準差,mm
CX——株距變異系數,%
試驗時測量穴盤苗與地面夾角A,將植株與地面夾角A≤30°判定為倒伏,30°
結果分析:
(1)栽植機構在3個擋位株距下作業時,蔬菜苗栽植直立度優良率均能達到81%以上,總的優良合格率達94.8%以上,能夠較好地滿足栽植要求;由表2中趨勢可看出,直立度優良率隨著栽植頻率的增加而減小,主要原因是隨著栽植頻率增加,栽植時投苗時間過短,蔬菜苗與鴨嘴脫離時間過短有被鴨嘴往上帶的趨勢,從而影響栽植狀態,導致栽植優良率有所下降。
(2)每組株距變異系數均較小,且不同株距及栽植頻率下變化差異不大,原因是栽植機構由底盤動力以一定傳動比輸入,栽植機構的轉速隨底盤前進速度的變化而相應改變,因此株距不受栽植頻率的影響,具有較好的株距穩定性。
(3)表2中有效測定株數指實測有效株數,小于理論測定值的情況是因為存在一定的漏栽數,這是由于作業時機器震動較大,苗缽由導苗筒落入鴨嘴時狀態不穩定導致苗缽落至鴨嘴外側。
6 結論
(1)針對不同作物有不同株距栽植要求,以自制行星輪轉臂式栽植機構為研究對象,構建栽植機構理論模型,分析建立了栽植機構前、后鴨嘴栽植點的運動軌跡數學模型,并基于該模型建立Matlab仿真分析輔助程序。
(2)基于Matlab GUI設計了計算機輔助優化設計人機交互界面,分析各主要參數對前后栽植點運動軌跡的影響規律,對該機構進行參數優化,由人機交互優化得出一組滿足優化要求的機構參數組合:L1=83 mm,L2=22 mm,L3=38 mm,L4=145 mm,Rd=120 mm,α=82°,β=8°,C(105,-22),D(165,-17)。
(3)以72孔黃瓜穴盤苗為試驗對象,直立度和株距變異系數為評價指標,對研制的移栽機栽植機構進行田間植苗試驗。結果表明:在3個株距下作業時,蔬菜苗栽植直立度優良率均能達到81%以上,總優良合格率94.8%以上,能夠較好滿足直立度和多株距移栽要求,驗證了理論建模和優化方法的正確性和可行性。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
