RLV雙環滑模RCS/氣動舵復合控制器設計
2018-12-04 05:44:02余光學耿光有
宇航總體技術 2018年6期
余光學,程 興,耿光有
(北京宇航系統工程研究所,北京 100076)
0 引言
從航天飛機到X-37B,各種可重復使用運載器(Reusable Launch Vehicle, RLV)具備從軌道返回的能力,隨著空間利用的需求與技術的進步,未來RLV具有重大的發展前景[1]。RLV再入返回跨越臨近空間,跨空域、大包線、多操作面等特性使得其運動建模與控制面臨著極大的挑戰,飛行控制技術是眾多的技術難題之一[2]。RLV再入返回一般由反作用控制系統(Reaction Control System, RCS)與氣動舵來實現姿態控制。控制系統作為運行中樞,要完成飛行器姿態跟蹤控制,涉及多種控制模式與控制策略,這給控制器的設計帶來了困難和挑戰[3-4]。
由于飛行速度和高度快速變化,加之強非線性與強耦合特性,姿態控制系統應用小擾動線性化方法結合PID控制器的設計受到局限[5]。同時,多操縱機構協調和冗余控制使得RLV再入返回復合控制研究成為突出的需求。對此,提出了一種雙環滑模RCS/氣動舵復合控制器設計方案,仿真驗證了雙環滑模RCS/氣動舵復合控制器的有效性,探究了RLV再入飛行姿態控制策略。
1 RLV再入姿控建模
作為典型的升力式再入,要滿足低速、跨聲速小攻角和高超聲速大攻角的氣動力、氣動熱要求,滿足在軌道上和大氣層內飛行所需的熱防護的要求,以及無動力再入飛行和著陸的氣動性能、穩定性和操作性要求[6]。如圖1(a)所示[7],建立的RLV氣動外形采用了機翼-升力體布局,由氣動舵和RCS進行操縱,氣動舵包括左右升降副翼,機身襟翼和方向舵。為了完成軌道機動、精確定向和交匯對接等任務,飛行器前部和尾部都安裝RCS,圖1(b)是其尾部RCS推力器的布置,其中數字標記為RCS姿控噴管的編號,再入返回過程使用尾部RCS和氣動舵面完成姿態控制。
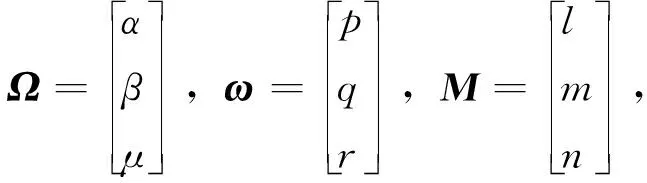
姿控參數α、β、μ分別為攻角、側滑角和傾側角,p、q、r分別為滾轉、俯仰和偏航角速率。RLV再入飛行時,姿態角速率比姿態角運動要快,基于奇異攝動理論[8],狀態變量時標分離后,將姿態角速率分為一組,用ω表示,稱為快狀態;將姿態角分為一組,用Ω表示,稱為慢狀態。基于RLV再入飛行數學模型[9],建立仿射線性化姿控模型如下,其中M為三通道的姿控力矩。令

(a) RLV三視圖
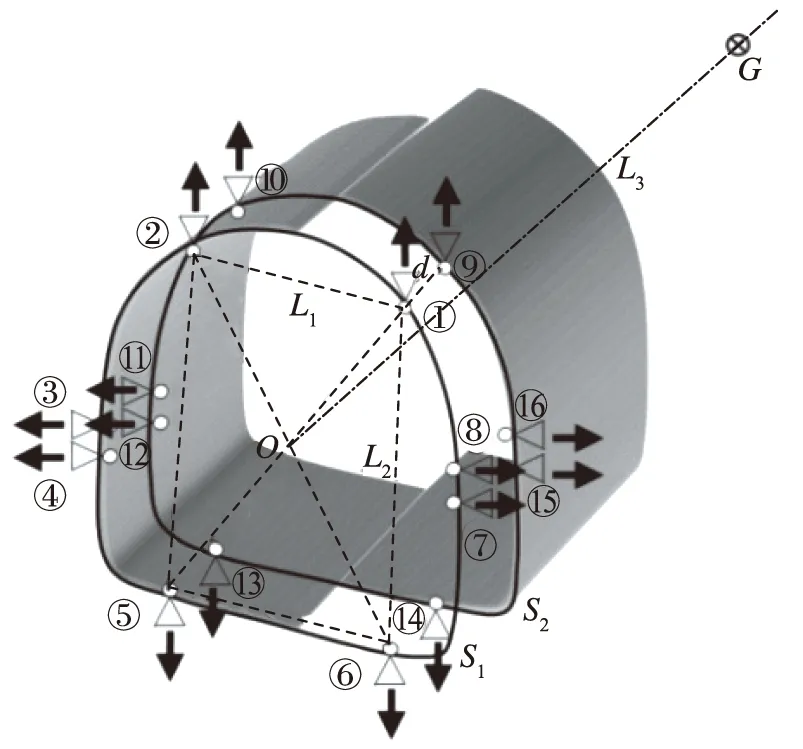
(b) RCS推力器布局圖1 RLV氣動外形Fig.1 Aerodynamic configuration of RLV
從而有
(1)
(2)
其中,
其中,D、L、Y分別為速度系下飛行器所受到的阻力、升力和側力;l、m、n分別為機體系下的滾轉力矩、俯仰力矩和偏航力矩。且有l=lA+lR,m=mA+mR,n=nA+nR,lA、mA、nA分別為氣動舵面產生的滾轉、俯仰、偏航力矩;lR、mR、nR分別為RCS產生的滾轉、俯仰、偏航力矩。
2 雙環滑模姿態控制方案
采用滑模控制律(Sliding Mode Control Law, SMCL),由時標分離原理,先對姿態角動態(慢狀態動態)設計所需要的姿態角速率指令,稱為慢回路滑模控制律;再由姿態角速率動態(快狀態動態)設計所需要的控制力矩,稱為快回路滑模控制律。快回路是慢回路的內環,若二者頻帶相差3~5倍,在設計與分析慢回路時可將快回路動態特性近似忽略[10]。
2.1 滑模控制律設計
令Ωc、ωc、Μc分別為慢、快狀態的指令和控制力矩指令,完成對姿態指令Ωc的跟蹤,由慢狀態動態式(1)設計姿態角速率指令ωc。對姿態角速率指令ωc的跟蹤,由快狀態動態式(2)設計控制力矩指令Mc。
由式(1)、式(2)可知,RCS和氣動舵作動后,姿態角速率立即變化;補償作用于慢狀態的非線性項fs后,姿態角Ω的動態受控制;進而可以由慢動態設計中間控制量ωc。對于慢狀態動態,構造Lyapunov函數
(3)
(4)
為保證穩定,設計慢動態滑模控制律為
(5)
其中ks=diag(ks,α,ks,β,ks,μ),ks,α、ks,β、ks,μ均大于0,用于設計慢回路的帶寬。且ρs=diag(ρs1,ρs2,ρs3),λs=diag(λs1,λs2,λs3),ρs1、ρs2、ρs3與λs1、λs2、λs3均大于0,用于調節系統外環響應動態。因為det(gs)=-secβ≠0,故gs可逆,控制律式(5)是有效的。令
eΩ=Ωc-Ω
(6)
則系統閉環姿態角誤差的動態為
(7)

同樣,設計快狀態滑模控制律為
(8)
其中,kf=diag(kf,p,kf,q,kf,r),kf,p、kf,q、kf,r均大于0,用于設計快回路的帶寬。且ρf=diag(ρf1,ρf2,ρf3),λs=diag(λf1,λf2,λf3),ρf1、ρf2、ρf3與λf1、λf2、λf3均大于0,用于調節系統內環響應動態。因為det(gf)≠0,故gf可逆,控制律式(8)是有效的。
將雙環滑模控制律的設計分解為慢(外)回路控制律設計和快(內)回路控制律設計;慢回路SMCL用于完成姿態角指令的跟蹤,快回路SMCL用于完成姿態角速率指令的跟蹤;慢回路SMCL給出姿態角速率指令,快回路SMCL給出控制力矩指令。控制力矩指令經過控制分配轉換成舵回路的舵面偏轉指令和RCS推力器的開關指令,舵面的偏轉與推力器的開啟經過控制融合進而產生實際作用在飛行器上的力與力矩,操縱飛行器按所需的姿態角指令飛行。式(5)與式(8)便構成了雙環滑模控制律。
2.2 控制指令分配
RLV從軌道返回時 ,動壓逐漸增大。當動壓較小時,氣動舵面的執行效率低,控制能力不足,必須采用RCS來完成姿態控制。隨著動壓的增大,氣動舵介入控制,RCS逐步退出,在此期間由RCS與氣動舵共同完成姿態控制任務。當飛行高度再降低,動壓進一步增大后,氣動舵完全介入,RCS退出控制,僅由氣動舵完成姿態控制。在RCS與氣動舵同時參與控制時,根據動壓邊界,控制權限按動壓從RCS線性過渡到氣動舵,實現控制力矩指令Mc的分配,設計RCS與氣動舵的控制分配策略如下:
(9)

由控制分配完成RCS與氣動舵的力矩指令到推力器開啟指令和舵面偏轉指令的映射,控制融合實現RCS/氣動舵的協調,完成飛行器的復合控制。所設計RLV雙環滑模姿態控制系統如圖2所示,慢回路SMCL與快回路SMCL、控制分配、飛行器動態構成了外回路;快回路SMCL與控制分配、飛行器動態構成了內回路。雙環SMCL和控制分配組成了RCS/氣動舵復合控制器,需要設計RCS與氣動舵的控制分配與融合方法,使得整個閉環系統都是漸近穩定的,滿足系統控制要求。

圖2 RLV雙環滑模姿態控制系統結構圖Fig.2 RCS/aerosurfaces compound control system block diagram
3 RCS/氣動舵復合控制策略
RCS與氣動舵的協調是根據飛行器的控制能力、飛行特性、再入走廊、氣動加熱與防護等因素綜合考慮的。不同的控制通道,氣動舵面的執行效率是不同的,因此需要根據實際的飛行包線與任務來確定動壓分界面。采用動壓和馬赫數,將整個再入飛行過程分為五段控制模式,具體的控制策略列見表1。
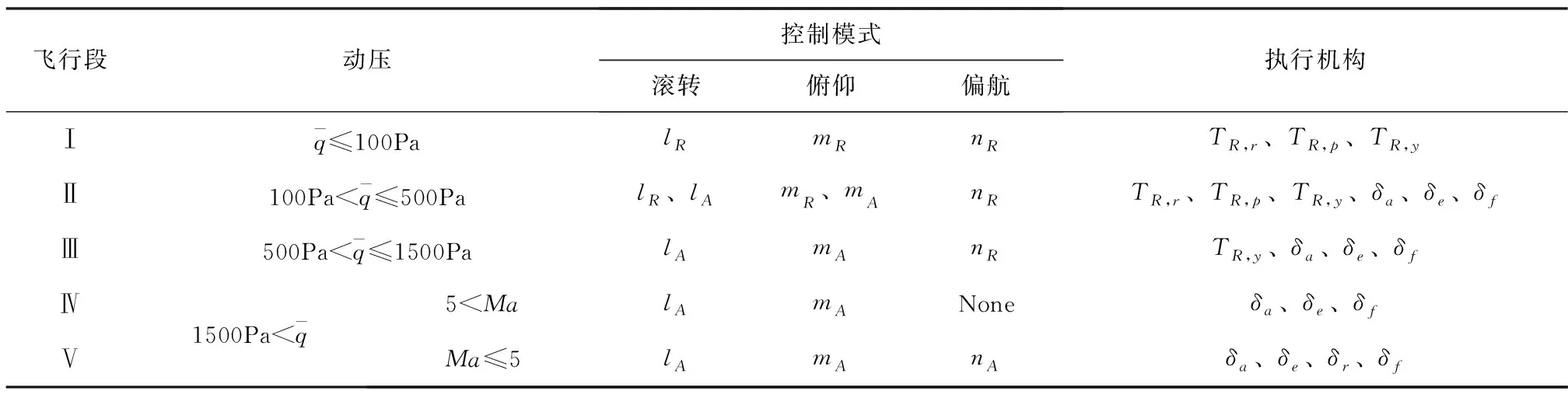
表1 飛行階段與控制模式
3.1 氣動舵面控制分配
控制分配與控制律獨立設計,簡化了控制器的設計過程。控制分配方法主要有直接分配、串聯鏈式分配和廣義逆分配等靜態控制分配,頻率加權、動態補償和動態預測等動態控制分配,線性規劃、非線性規劃等非線性控制分配。

優化的目標為
minf(δc)
(10)
約束條件為
(11)
其中,δmin、δmax分別為相應氣動操縱面的最小、最大舵偏位置。優化的目標函數取為
(12)

3.2 RCS控制分配
RCS推力器的組合可以實現多種控制力矩,并為系統余度提供硬件保證,控制分配則需要協調多個推力器的工作。根據所設計的RCS布局,可以采用分軸控制、分檔控制和查表控制[11]。
RCS是直接力控制,為了使控制效果盡量接近于控制律給出的效果,以驗證飛行特性,RCS的控制分配采用分軸控制方式。如圖3所示,將16個推力器固定地分配給滾轉、俯仰和偏航通道,圖中“1”表示相應通道的正力矩效果,“-1”表示相應通道的負力矩效果。這樣,推力器的調用不存在耦合,各個軸只有一個推力級別且只有一種組合。盡管每個軸的力矩大小是固定的,沒有充分利用最大控制力矩,但可以同時控制3個軸,避免耦合所產生的選擇邏輯困難。此時采用⑨、⑩號推力器對滾轉通道進行控制,采用①②、⑤⑥號推力器對俯仰通道進行控制,采用③④、⑦⑧號推力器對偏航通道進行控制,根據RCS控制力矩的大小和方向由調制器確定各個推力器的開啟狀態。
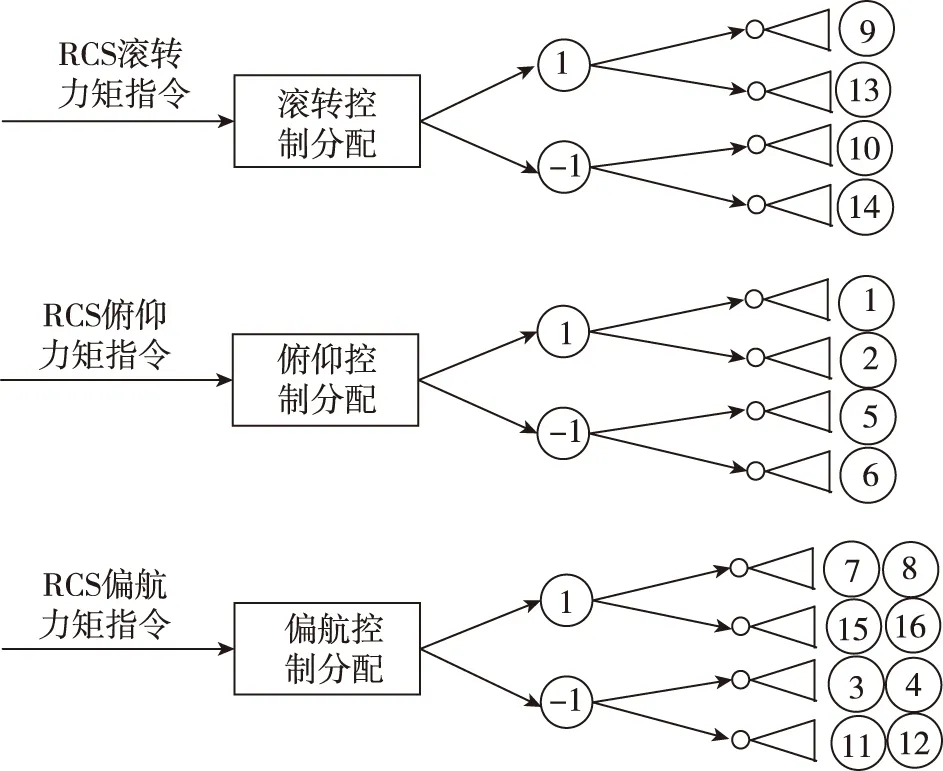
圖3 RCS的控制分配Fig.3 The control allocation of RCS
為了實現RCS的控制力矩指令轉換到RCS推力器的開關指令,基于施密特觸發器,采用脈沖寬度-脈沖頻率(Pulse-Width Pulse-Frequency, PWPF)調制器來實現。PWPF調制器的控制回路輸入和輸出之間不是線性關系,而是處于開關模式,用于俯仰、偏航和滾轉通道的推力器開關指令生成。圖4為PWPF調制器生成推力器開關指令的原理圖,采用施密特觸發器,用簡單的模擬電路技術即可實現。
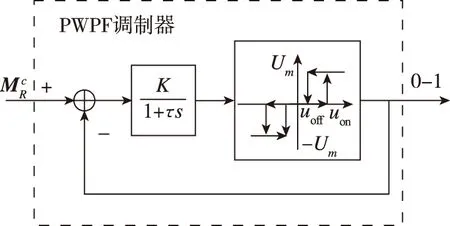
圖4 PWPF調制器的控制回路Fig.4 The control loop of the PWPF modulator
通過PWPF調制器,將分配給RCS的指令力矩轉換成了一系列矩形脈沖,即滾轉、俯仰和偏航通道的RCS開關指令,推力器執行相應的開關指令后獲得所需要的控制力矩。控制器和調制器參數要根據具體的被控模型仔細匹配,實現所需要的控制能力。
3.3 RCS/氣動舵的鏈式遞增融合
再入初始階段,RLV僅靠RCS來實現姿態控制。而當RCS與氣動舵協調控制時,以氣動舵為主要執行機構,主要執行機構全時間工作,按鏈式順序排列,逐次遞增;RCS為輔助執行機構,輔助執行機構在需要時才工作。這樣,才能最大限度地使用常規氣動舵面,減少RCS的工作時間,進而減少RLV所需攜帶的RCS燃料。圖5是鏈式遞增融合的控制結構。
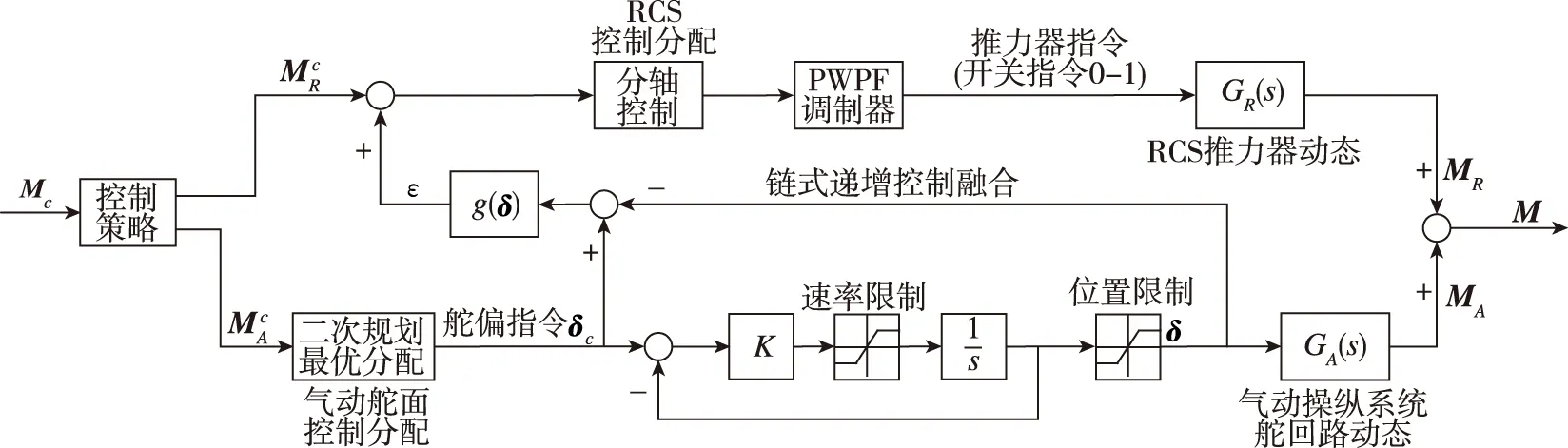
圖5 RCS/氣動舵鏈式遞增融合結構Fig.5 RCS/aerosurfaces daisy-chain control combination schematic
當氣動舵回路信號處于速率限制和位置限制之內,則誤差信號ε為0,RCS不工作。僅當氣動舵回路超出速率限制和位置限制范圍,ε不為0,此時RCS工作,用以補償氣動舵面操縱力矩的不足。可見,采用鏈式遞增融合,RCS/氣動舵復合控制能夠減小燃料消耗,避免RCS長時間工作,延長其使用壽命。
4 仿真算例
控制方案設計綜合給出了RLV基于控制的建模與RCS/氣動舵復合控制器的設計,控制器由控制律、控制策略和控制分配構成。為了驗證雙環滑模RCS/氣動舵復合控制方案的有效性,對所研究的RLV無動力再入返回進行了仿真實驗,檢驗其執行標稱飛行任務的能力。仿真再入初始高度為121km,初始速度為7500m/s,仿真結果如圖6~圖12。
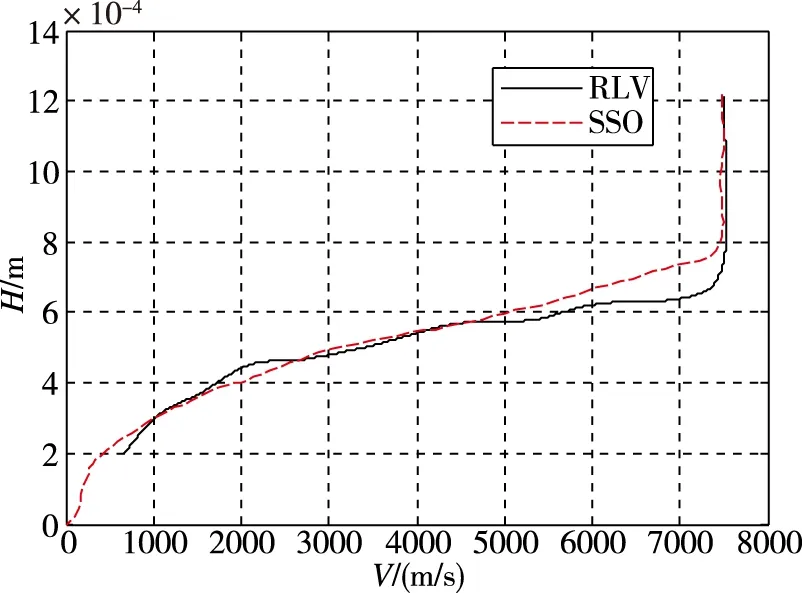
圖6 RLV再入飛行的速度-高度剖面Fig.6 The velocity-height profile of RLV reentry flight
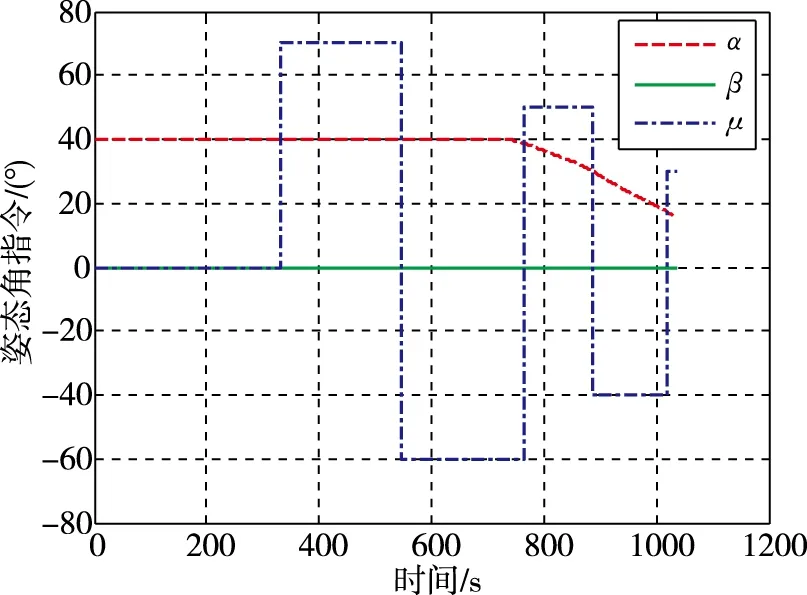
圖7 姿態角指令Fig.7 Attitude angle command
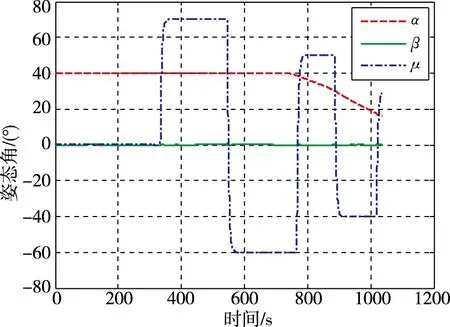
圖8 姿態角響應Fig.8 Attitude angle response
圖6為RLV再入飛行的速度-高度 (H-V)軌跡,并與航天飛機軌道器(Space Shuttle Orbiter, SSO)再入返回進行了對比,得到了與航天飛機一致的再入H-V軌跡。圖7為姿態角指令隨時間的變化。圖8為雙環滑模控制律下的RLV實際的攻角、側滑角和傾側角響應曲線,姿態角誤差在±1°范圍之內。

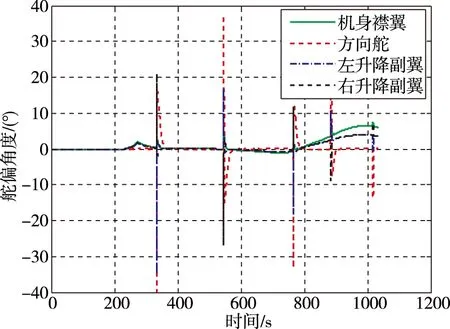
圖9 氣動操縱舵面偏轉(無鏈式遞增融合)Fig.9 Aerosurfaces deflections(non daisy-chain)
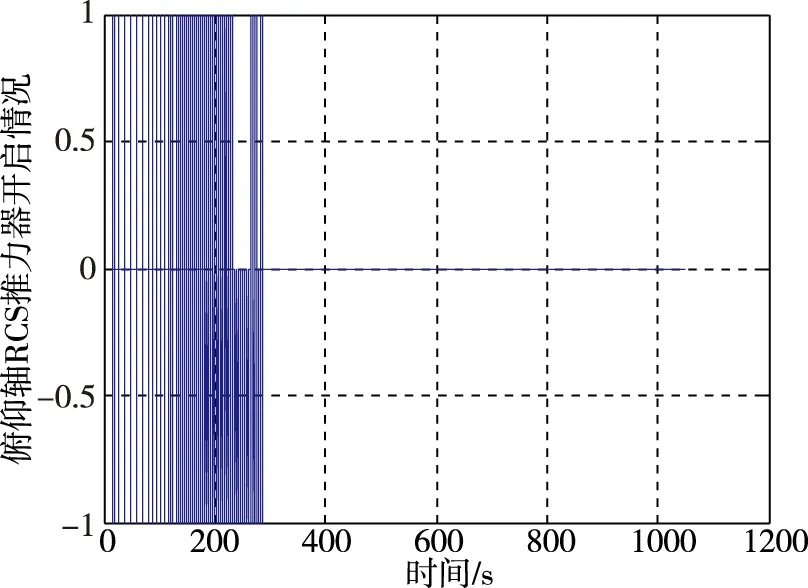
圖10 俯仰通道RCS推力器指令(無鏈式遞增融合)Fig.10 RCS response(non daisy-chain)
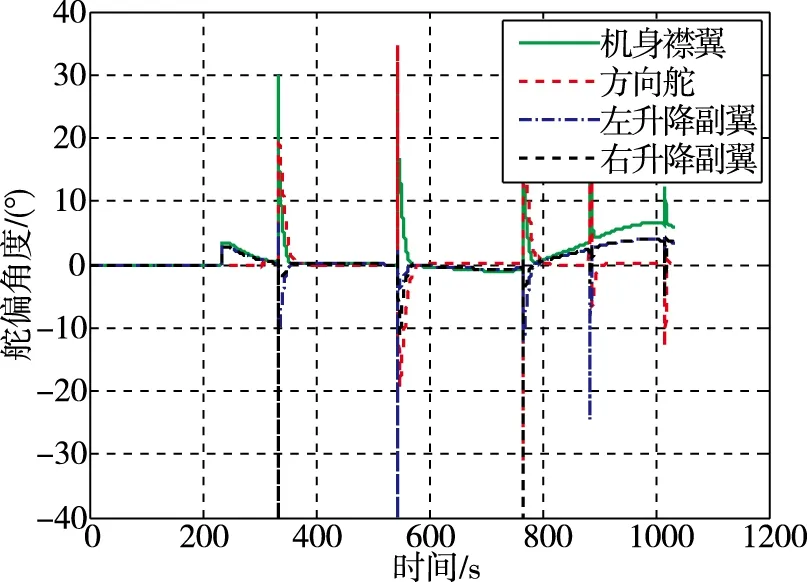
圖11 氣動操縱舵面偏轉(有鏈式遞增融合)Fig.11 Aerosurfaces deflections(with daisy-chain)

圖12 俯仰通道RCS推力器指令(有鏈式遞增融合)Fig.12 RCS response(with daisy-chain)
再入過程中,在傾側角反轉時,左右升降副翼差動偏轉實現滾轉控制,且方向舵協同偏轉保證側滑角為0°,氣動舵的最優控制分配實現了RLV的BTT滾轉控制。以俯仰通道RCS工作情況為例,當不采用鏈式遞增控制融合時,RCS的執行情況如圖10所示,相應的氣動舵響應見圖9。采用鏈式遞增控制融合時,RCS的執行情況見圖12所示,相應的氣動舵響應見圖11。對比圖9與圖11、圖10與圖12可知,鏈式遞增融合中,RCS工作時間較短,氣動舵的偏轉較大,充分利用了可用的氣動舵執行能力,只有當氣動舵能力不足時才啟用RCS工作。可見,RCS/氣動舵復合控制器中,當采用相同的控制分配方法時,鏈式遞增融合能夠有效地減小RCS的工作時間,最大限度地利用氣動舵。
5 結論
針對RLV再入返回,所設計的雙環滑模RCS/氣動舵復合控制器能夠有效地完成姿態跟蹤控制,滿足性能指標要求。復合控制器由雙環滑模控制律、控制分配和控制融合策略構成。采用分軸控制方式完成了RCS的解耦控制分配,基于二次規劃的方法實現了氣動舵面的最優控制分配,鏈式遞增融合協調RCS與氣動舵面的復合控制,有效地利用了氣動舵面的操縱能力,減少了RCS的工作時間。所設計的雙環滑模RCS/氣動舵復合控制器可進一步用于RLV飛行能力測試與制導律的驗證。
雙環滑模姿態控制系統的設計能有效地應用于RLV再入姿態控制,也能為再入飛行器或空天飛機的姿態控制器設計提供參考。進一步的研究方向是RCS橫向噴流對氣動的干擾建模、姿態控制器的魯棒性設計與評估以及RCS/氣動舵復合控制的故障重構研究。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
艦船科學技術(2022年13期)2022-08-11 09:30:02
鐵道通信信號(2020年9期)2020-02-06 09:15:22
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
測控技術(2018年5期)2018-12-09 09:04:26
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
西安航空學院學報(2014年5期)2014-07-13 01:27:52