基于RBF神經網絡的導彈智能控制系統設計
2018-12-04 05:50:42徐世昊崔乃剛韋常柱
宇航總體技術 2018年6期
關鍵詞:設計
徐世昊,崔乃剛,韋常柱
(哈爾濱工業大學航天學院,哈爾濱 150001)
0 引言
面對21世紀復雜多變、對抗激烈的戰場環境,世界各軍事大國均積極發展以人工智能技術為核心的新一代智能導彈武器系統[1]。而智能導彈武器系統的發展,離不開智能控制技術在導彈上的應用。
智能控制技術于1971年首次被提出之后,由于其強大的學習能力和對外界環境的適應能力,迅速成為控制領域的前沿研究方向。目前理論發展較完善,且取得廣泛應用的智能控制方法主要有模糊控制、神經網絡控制、專家控制和自適應控制、自組織控制和迭代學習控制等[2]。國內外許多學者將智能控制技術運用到導彈控制系統設計中,取得了豐富的研究成果。其中,崔乃剛等[3]為解決不確定海況對潛射導彈出水姿態的影響,設計了潛射導彈模糊PID分段控制器。王強等[4]利用徑向基函數網絡與K-means最鄰近聚類算法對導彈逆動力學系統進行動態模型辨識,實現了三通道解耦控制。Rong等[5]為傾斜轉彎導彈設計了自學習模糊控制器,通過擴展序貫自適應模糊推理系統與傳統Back-Stepping控制方法的結合,提高了控制系統應對氣動偏差和外界干擾的能力。Ran等[6]在導彈制導控制一體化系統中加入自適應模糊系統以逼近系統不確定性,并推導了保證系統穩定性的模糊系統參數自適應調節律。Lee等[7]基于狀態依賴Riccati方程與模塊化神經網絡設計了導彈助推段的自動駕駛儀。王楓等[8]采用擬人控制方法,基于廣義歸約的方法將導彈姿態控制問題分解成若干本原問題,之后根據各本原問題的主次關系及耦合關系設計非線性控制律,最后利用遺傳算法優化控制器中相應權值。其他學者的研究也主要集中在將智能控制與傳統控制方法相結合,以提高導彈控制系統面對諸如舵控效率不足[9]、多執行機構復合控制[10]、氣動偏差[11]、模型不確定性[12]等情況下的控制能力,而此類方法的性能往往受限于傳統控制方法,且沒有利用大量數據對神經網絡進行離線訓練,以充分發揮神經網絡的強大學習能力。
本文利用神經網絡強大的逼近能力和學習能力,俯仰/偏航通道采用飛行數據離線訓練神經網絡的方式,訓練完成的神經網絡可以直接用作控制器;滾轉通道采用神經網絡在線調整權值的方式以對系統誤差實時逼近;并將兩種控制器同時應用于某型傾斜轉彎導彈非線性六自由度仿真中,驗證了所設計控制器的有效性。
1 導彈控制模型建立及神經網絡訓練樣本獲取
1.1 控制模型建立
神經網絡的離線訓練需要大量樣本的支撐,而樣本的獲取又依賴于傳統控制器產生的大量仿真數據。本文設計符合性能要求的PID控制器,然后通過仿真獲得足夠的神經網絡訓練樣本。
將導彈運動方程組進行小擾動線性化處理,忽略由于重力影響等所產生的動力系數,可得三通道擾動運動方程組如下:
(1)
(2)
(3)
式中如a22、a24等所示動力系數可參考文獻[13]求得。
將式(1)~式(3)進行Laplace變換,可得到三通道傳遞函數,如下所示:
(1)俯仰通道
(4)
(2)偏航通道
(5)
(3)滾轉通道
(6)
式中,ny、nz為導彈過載,δx、δy、δz為舵偏角。
設定控制系統幅值裕度為6dB,相位裕度為45°,可通過頻域分析法設計PID控制參數。
1.2 訓練樣本獲取
通過在表1所示范圍內隨機改變導彈運動初始狀態[x0,y0,z0],目標運動初始狀態[xt0,yt0,zt0]與目標側向機動過載nzt進行10組六自由度仿真,在每組仿真中取1000個彈道特征點處數據,從而獲取本文神經網絡訓練所需樣本。
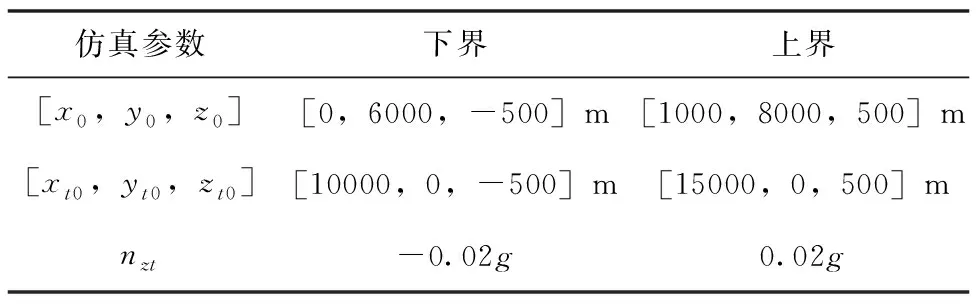
表1 仿真參數變化范圍
2 RBF神經網絡理論基礎
RBF網絡于1988年提出后,因其結構簡單、收斂速度快和能夠逼近任意非線性函數的特性,逐漸地在函數逼近[14]、模型預測[15]、系統辨識[16]和故障分類[17]等領域得到廣泛應用。常見的正則化RBF網絡具有如下特征[18]:
1)正則化RBF網絡的隱含層只要有足夠多的隱含節點,則網絡對任意非線性多元連續函數具有良好的逼近能力,這意味著正則RBF網絡可以作為非線性函數的通用逼近器使用;
2)給定一個未知的非線性函數f(·),總可以選擇一組網絡權值系數,使得網絡對于f(·)的逼近是最優的。
RBF網絡采用前饋形式,一般包括輸入層、隱含層和輸出層,其典型結構如圖 1所示。
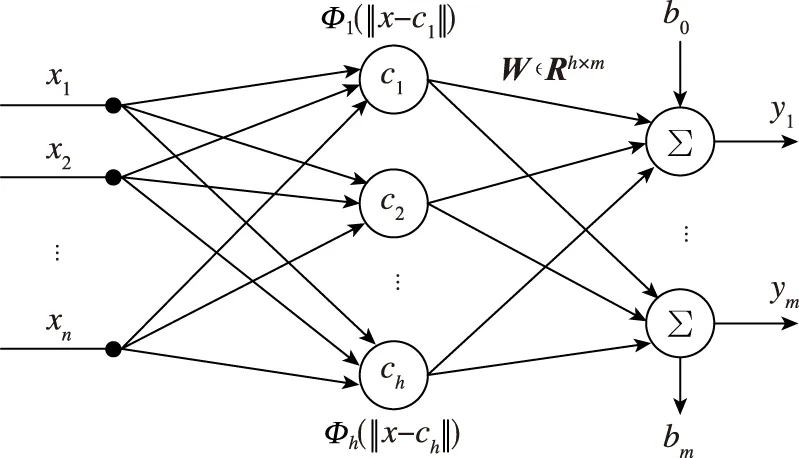
圖1 RBF網絡結構圖Fig.1 The structure of RBF network
針對圖1所示具有n-h-m結構的RBF網絡,其輸入可表示為x=(x1,x2,…,xn)T,網絡中第i個隱含層節點的數據中心值設為ci,徑向基函數的寬度設為bi,網絡的映射關系可分為2層[19]:
1)從輸入層到隱含層的非線性映射,選擇Gaussian基函數,則第i個隱含層單元的輸出為:
(7)
2)從隱含層到輸出層的線性映射,則輸出層第j個神經元的輸出為:
(8)
3 俯仰/偏航通道神經網絡控制器設計
本文所設計的過載駕駛儀中,輸入偏差信號、導彈飛行狀態與輸出控制指令信號之間的關系可表示為函數映射,通過導彈飛行過程中產生的偏差與飛行狀態數據對RBF網絡進行離線訓練以逼近函數映射,離線訓練完成的RBF網絡可以直接作為控制器使用。
對于俯仰通道而言,神經網絡的輸入為nyc-ny,輸出為舵偏角指令δz;對于偏航通道而言,神經網絡的輸入為nzc-nz,輸出為舵偏角指令δy。兩個通道的網絡輸入層節點數n=1,輸出層節點數m=1,而隱含層節點數h需根據網絡訓練算法確定。
3.1 控制器設計過程
采用Chen等提出的正交最小二乘算法(Orthogonal least squares learning algorithm, OLS)[20]進行RBF網絡的離線訓練,具體步驟如下:


3)在已知訓練樣本輸入數據x、輸出數據y與RBF網絡數據中心xk后,隱含層與輸出層之間的權值與偏移量可以通過廣義逆方法求解隱含層輸出與樣本輸出數據之間的線性方程組的方式得出。
4)計算此時RBF網絡輸出相對于樣本輸出的均方誤差(Mean Square Error, MSE),如果MSE小于目標值,則終止算法,否則進行步驟5。
5)對矩陣H進行Gram-Schmidt正交化,使得矩陣H的第k列正交于第k-1列。
6)重復步驟2~步驟5,直至MSE小于目標值或算法達到最大循環步驟。
3.2 仿真分析
采用本文所設計符合性能要求的PID控制器,通過改變導彈運動的初始條件[x0,y0,z0],目標初始位置[xt0,yt0,zt0]與目標側向機動過載nzt進行10組六自由度仿真,以獲得RBF網絡訓練所需樣本數據,通過每組仿真獲得1000組數據,在獲得的10000組數據中選取9000組作為訓練數據,剩余1000組作為測試數據。設定徑向基函數寬度bi=0.8,網絡輸出誤差目標為lg(MSE)<-15,RBF網絡設計結果如圖2~圖3所示。
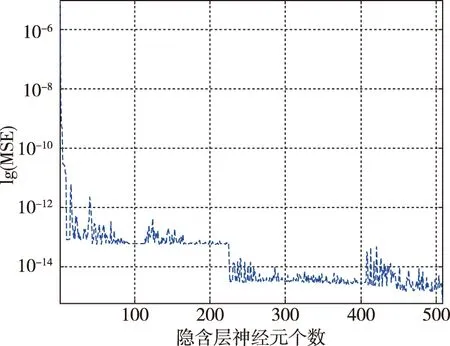
圖2 俯仰通道網絡MSE變化曲線Fig.2 The MSE in recursions of pitch channel RBF network
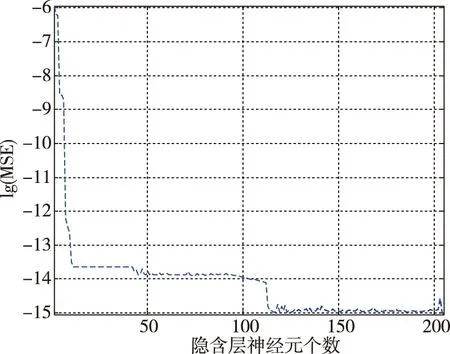
圖3 偏航通道網絡MSE變化曲線Fig.3 The MSE in recursions of yaw channel RBF network
由圖1與圖2可知,隨著隱含層神經元個數的增加,RBF網絡的擬合誤差在逐漸減小,對于俯仰通道而言,隱含層節點增加至507個時,lg(MSE)<-15;對于偏航通道而言,隱含層節點增加至204個時,lg(MSE)<-15。所設計的RBF網絡均滿足精度要求。
利用1000組測試數據對訓練所得的RBF網絡進行性能驗證,結果如圖4~圖5所示。
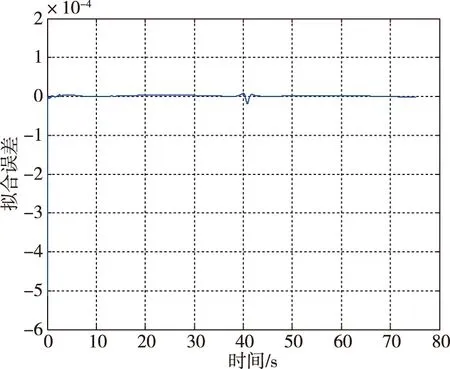
圖4 俯仰通道RBF網絡擬合誤差曲線Fig.4 The RBF network fitting error of pitch channel
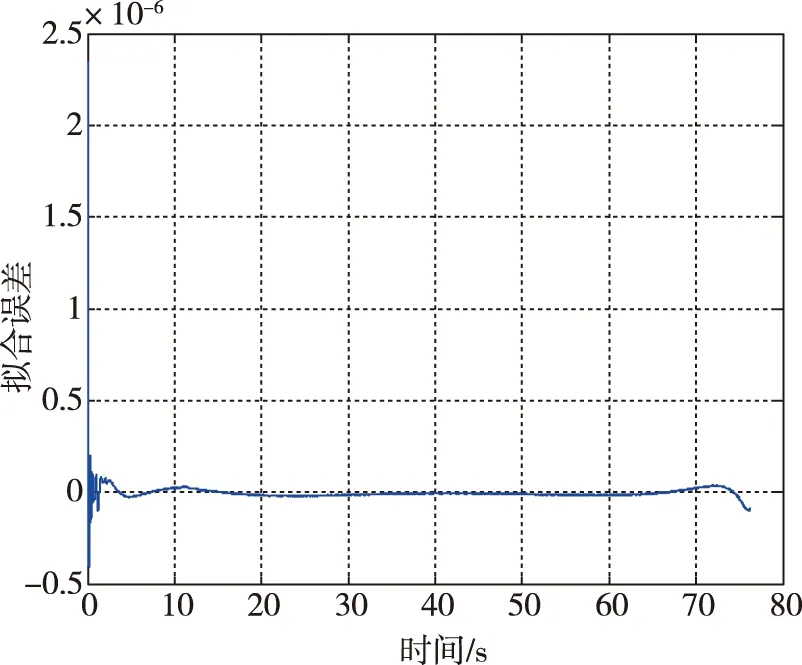
圖5 偏航通道RBF網絡擬合誤差曲線Fig.5 The RBF network fitting error of yaw channel
由以上仿真結果可知,俯仰通道擬合誤差最大值在10-5量級,擬合誤差平均值在10-8量級。偏航通道擬合誤差最大值在10-8量級,擬合誤差平均值在10-10量級,見表2。以上結果說明訓練所得RBF網絡能夠很好擬合俯仰通道與偏航通道的控制器。
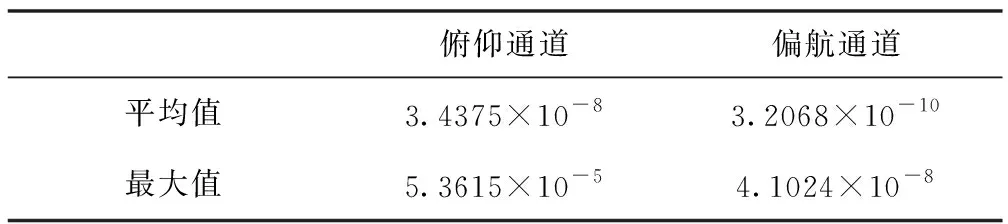
表2 擬合誤差統計
4 滾轉通道神經網絡控制器設計
4.1 控制器設計過程
滾轉通道采用姿態自動駕駛儀的形式,將式(3)轉化為狀態空間表達式,有:

(9)
式中:
Δd為系統非建模動態或擾動量,設其上界為D。
取x1=γ,x2=ωx,將式(9)寫為如下形式:
(10)

(11)
設計控制律為:
(12)
式中,sign為符號函數。將控制律帶入式(11)中,可得:

(13)
取η≥D,則有:

(14)
上述控制律依賴于f(x)的精確性,若由于外部干擾以及系統未建模動態的影響使得f(·)為某一不確定非線性函數,則可以采用RBF網絡逼近f(·)來設計控制器。此時RBF網絡的輸入為γc-γ,輸出為f(·)當前取值,網絡輸入層節點數n=1,輸出層節點數m=1,隱含層節點根據仿真尋優選擇為h=21。
由式(7)可知,RBF網絡輸入輸出算法為:

(15)
(16)
代入式(12)中,可得控制律:
(17)
將控制律式(17)代入式(11)中,得:
(18)
式中:
設計Lyapunov函數為:
(19)
對式(19)求導,結合式(17)與式(18)可得:

(20)
則有:

(21)

在實際仿真過程中,為克服滑模抖振問題,可采用準滑動模態控制方法[21]。即利用連續的Sigmoid函數θ(s)代替符號函數sign(s),θ(s)的表達式為:
(22)
4.2 仿真結果
取30s特征點處滾轉通道動力系數,滑模面參數設為c=50,變結構控制項參數η=10,Sigmoid函數中δ=0.05。RBF網絡中心向量設置為:ci=0.01×[-1,-0.9,…,0.9,1],徑向基函數寬度bi=15,網絡初始權值W全部為0;自適應律參數λ=0.015;仿真過程中滾轉角指令為γd=15sin(t)deg。在仿真開始1.5s后,在f(x)中加入非線性干擾項,使得f(·)=f(x)+0.1sin(x1)cos(x2)。在不加入RBF網絡逼近f(·),即采用式(6)所示的控制律時,仿真結果如圖6~圖7所示。
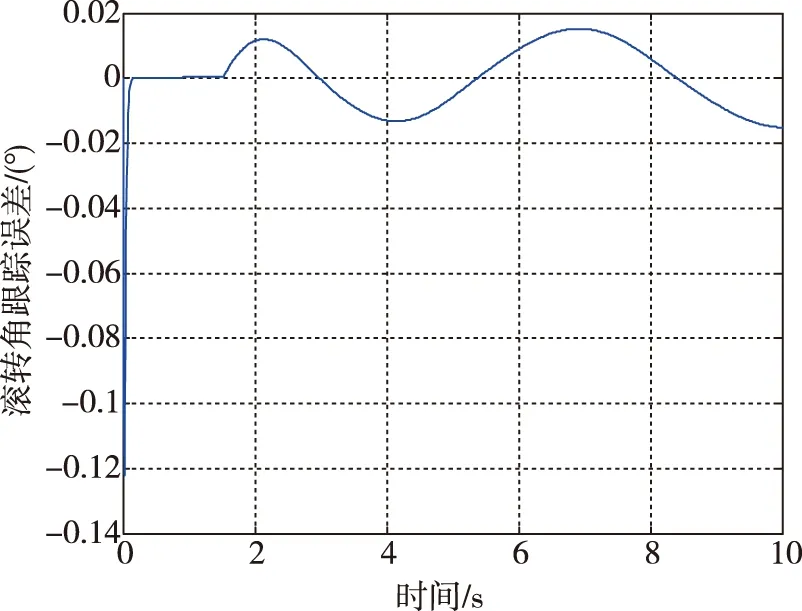
圖6 滾轉角跟蹤誤差變化曲線Fig.6 The tracking error of roll angle
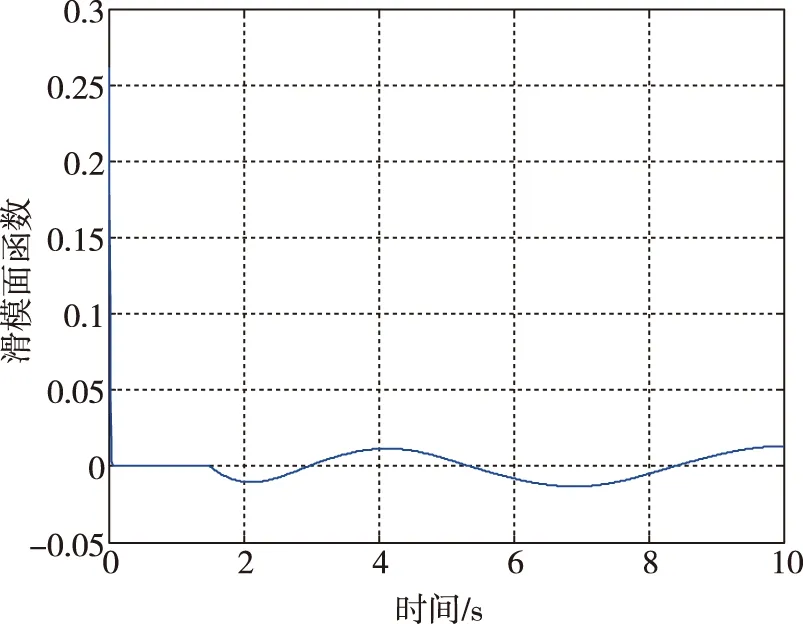
圖7 滑模面函數變化曲線Fig.7 The curve of sliding surface function
由圖6~圖7所示仿真結果可知,在加入外部非線性干擾項后,單純采用滑模控制不能消除滾轉角和滾轉角速率跟蹤誤差,且滑模面也未能收斂至0。在加入RBF網絡對非線性干擾項進行逼近,即采用控制律式(11)與權值自適應律式(14)時,仿真結果如圖8~圖10所示。
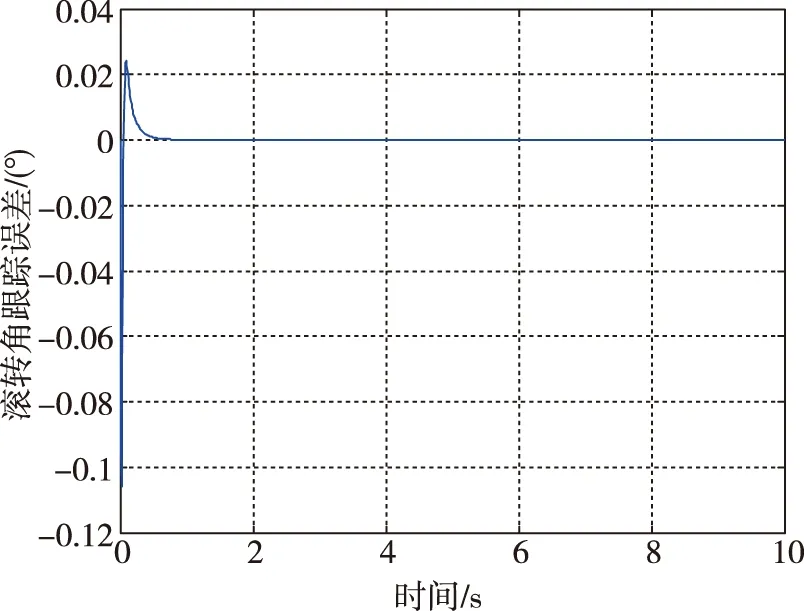
圖8 滾轉角跟蹤誤差變化曲線Fig.8 The tracking error of roll angle
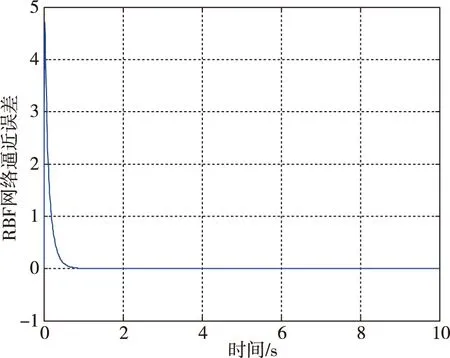
圖9 RBF網絡逼近誤差曲線Fig.9 The approximation error of RBF network
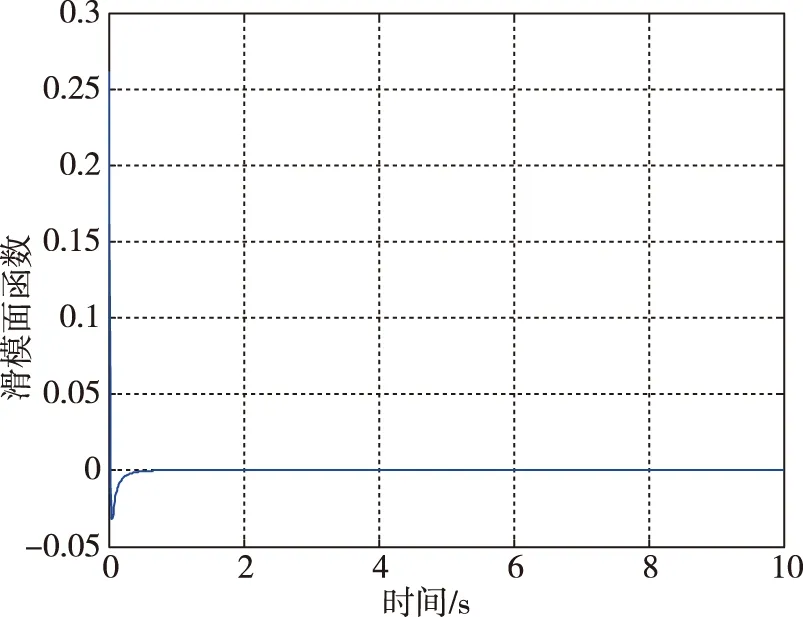
圖10 滑模面函數變化曲線Fig.10 The curve of sliding surface function
由圖8~圖10所示的仿真結果可知,在加入RBF網絡的逼近作用后,滾轉角跟蹤誤差在1s內收斂至0,滾轉角速率跟蹤誤差在4s內收斂至0;同時滑模面也于2s內收斂至0附近鄰域;在加入非線性干擾項后,RBF網絡能夠在2s內通過調節權值逼近f(·)。
5 非線性六自由度仿真
本節將所設計的兩種智能控制器加入某型傾斜轉彎導彈非線性六自由度仿真中,通過對比彈體實際的過載值與過載指令來評估過載自動駕駛儀的控制性能,同時分析滾轉角的大小。
導彈初始條件設為:
[v0,θ0,ψv0]=[350m/s,0°,0°]
[x0,y0,z0] =[0,8000,-500]m
[ωx0,ωy0,ωz0]=[0,0,0]rad/s
[?0,ψ0,γ0]=[0°,0°,1°]
目標坐標為[xt0,yt0,zt0]=[15000,0,0]m,速度為[vtx0,vty0,vtz0]=[10,0,0]m/s;并進行側向機動,機動過載為0.03g,加入所設計的兩種智能控制器,仿真結果如圖11~圖15所示。
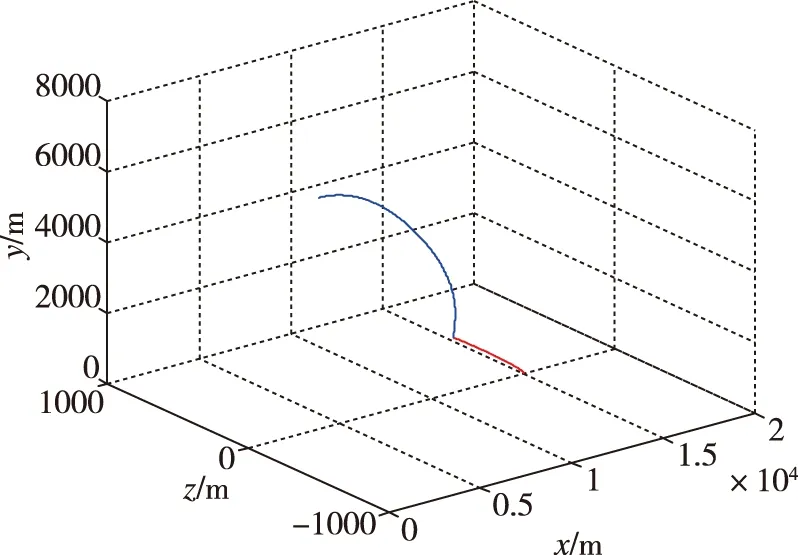
圖11 三維彈道曲線Fig.11 The trajectory curve of missile
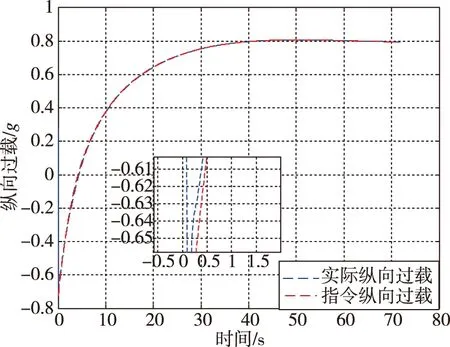
圖12 縱向過載跟蹤曲線Fig.12 The tracking curve of vertical overload
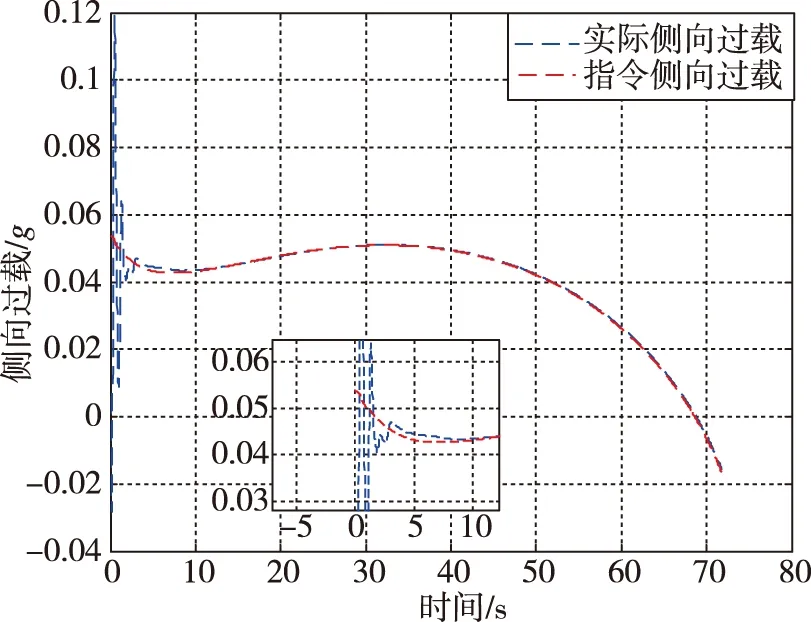
圖13 側向過載跟蹤曲線Fig.13 The tracking curve of lateral overload
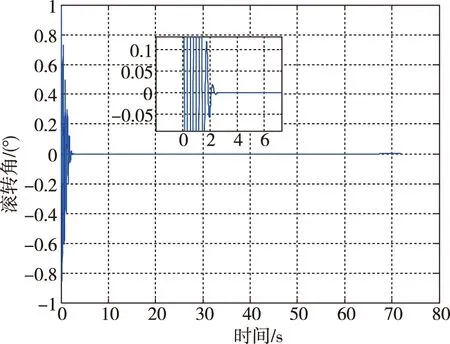
圖14 滾轉角變化曲線Fig.14 The curve of roll angle
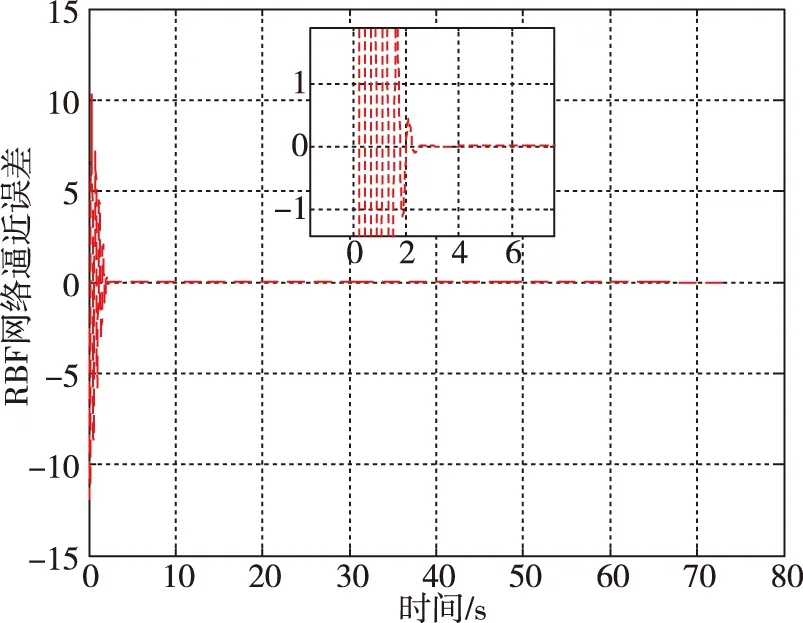
圖15 RBF網絡逼近誤差曲線Fig.15 The approximation error of RBF network
由仿真結果可知,導彈于72.6s成功命中地面機動目標,脫靶量為0.41m,RBF網絡逼近誤差在仿真開始3s內由于權值調整而出現較大幅度的振蕩現象,之后逐漸收斂至0,滾轉角也隨之收斂到0。縱向過載和側向過載在3s內均能實現對指令過載信號的穩定跟蹤。
6 結論
1) 對于俯仰和偏航通道使用飛行過程中數據對RBF網絡進行離線訓練,以直接得到神經網絡控制器,仿真結果表明,隨著RBF網絡隱含層神經元的增加,網絡對于俯仰通道控制器的平均逼近誤差減小至3.4375×10-8,對于偏航通道控制器的平均逼近誤差減小至3.2068×10-10。
2) 對于滾轉通道利用滑模控制理論,采用RBF網絡逼近系統中非線性不確定項,結合Lyapunov穩定性理論推導了RBF網絡權值自適應調節律,并證明了所設計控制系統的穩定性。通過滾轉通道對指令信號的跟蹤仿真說明了所設計控制系統在外界存在非線性干擾的情況下,RBF網絡可通過調節權值在2s內逼近干擾項,以提高傳統滑模控制器的性能。
3) 通過六自由度仿真驗證了所設計的智能控制系統能夠控制導彈成功命中地面機動目標。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04