飛秒脈沖非對稱互相關絕對測距?
2018-12-02 11:10:38彭博曲興華張福民張天宇張鐵犁劉曉旭謝陽
物理學報 2018年21期
彭博 曲興華 張福民 張天宇 張鐵犁 劉曉旭 謝陽
1)(天津大學,精密測試技術及儀器國家重點實驗室,天津 300072)2)(北京航天計量測試技術研究所,北京 100076)(2018年7月2日收到;2018年7月28日收到修改稿)
光學頻率梳是一種重復頻率與偏置頻率鎖定的新型光源,在頻域上為頻率間隔穩定的頻率梳齒,在時域上為相對距離穩定的飛秒脈沖激光.光學頻率梳在測距中的應用廣泛,能夠實現遠距離高精度的測量.本實驗使用飛秒激光脈沖作為光源,基于諧振腔掃描光學采樣測距原理得到非對稱的互相關干涉條紋,實現了遠距離高精度的絕對測距.非對稱互相關條紋可通過色散補償與調節光學頻率梳的重復頻率得到,并通過得到的非對稱的互相關干涉條紋對測距結果進行補償.實驗結果表明測距系統能夠實現在50 m范圍內誤差為2μm的絕對測距,測量相對誤差為1.9×10?7.
1 引 言
第17屆國際計量大會將國際基本單位米與光在真空中的速度聯系起來,光學頻率梳作為一種新型的高穩定性的光源,成為時間與長度測量的重要工具.2000年,日本國家計量研究院的Minoshima和Matsumoto[1]首次將飛秒脈沖激光應用于絕對測距,并通過光學頻率梳模間自拍頻原理實現了大尺寸高精度的測量.此后,飛秒激光脈沖在測距中的應用越來越成熟與重要.光學頻率梳測距方式[2,3]主要有合成波長法[1,4,5]、多波長干涉法[6,7]、色散干涉法[8,9]、飛行時間法[10,11]與光學采樣法[12].本文采用光學采樣法.光學采樣法通過兩個脈沖之間的掃描采樣得到互相關干涉條紋實現測距,其分為位移臺掃描法[13]、雙光梳異步采樣(asynchronous optical sampling,ASOPS)法[14]與諧振腔掃描光學采樣(optical sampling by cavity tuning,OSCAT)法[8,15].其中位移臺掃描法由于在測量過程中使用了機械結構而影響測量精度,且具有測量速度慢、不適用于大尺寸測量的缺點.ASOPS法測距系統復雜,且實驗成本高.OSCAT法測距原理具有成本低、結構簡單、易于實現等優點,因此本實驗使用單光梳OSCAT法.OSCAT測距系統[16]通過非平衡邁克耳孫干涉儀得到測量光與參考光的互相關干涉信號,并通過互相關信號得到待測距離信息.
傳統的OSCAT測距系統長延時光纖在參考臂[1,15?17],不利于實現任意距離的測量,且需要通過色散補償光纖對經過延時光纖后的脈沖進行嚴格的色散補償,來得到對稱的互相關干涉條紋[18].當互相關條紋不嚴格對稱時,在實際測量過程中由于脈沖形狀的變化導致峰值偏移帶來的測量誤差無法評價,且無法通過該OSCAT測距系統實現單系統的絕對測距,需要外部儀器提供粗略測量.本實驗將長延時光纖放在測量臂,使測距系統的非模糊范圍隨測量距離的增加而增加,易實現長距離的絕對測距.實驗中利用非對稱互相關條紋希爾伯特變換的兩個波峰實現了測量過程中互相關條紋寬度變化的實時測量,通過寬度變化實現了測量過程中誤差的補償,并提出一種可行的單系統絕對測距方法.
2 原理及實驗系統
2.1 實驗系統
如圖1所示,實驗系統由兩部分組成,分別為OSCAT測距系統與He-Ne激光干涉儀.OSCAT測距系統中激光脈沖光源重復頻率為250 MHz,頻率掃描范圍為2.3 kHz.光源出射光通過光纖耦合器OC1分為測量光與參考光,測量光經過長延時光纖進入環形器,經過準直器、擴束鏡后出射到目標靶鏡,反射光通過環形器進入光纖耦合器OC3.其中長延時光纖為104 m單模光纖與12 m色散補償光纖組成.參考光經過光纖耦合器OC2分為兩部分,一部分進入光電探測器PD2產生自拍頻,并通過計數器對光源重復頻率進行測量,另一部分直接進入光纖耦合器OC3與測量光在光電探測器PD1發生拍頻,并通過示波器進行數據采集.He-Ne激光干涉儀用于驗證測距系統的測距結果的準確性.實驗中光源重復頻率的掃描需要的掃描電壓通過函數發生器產生.
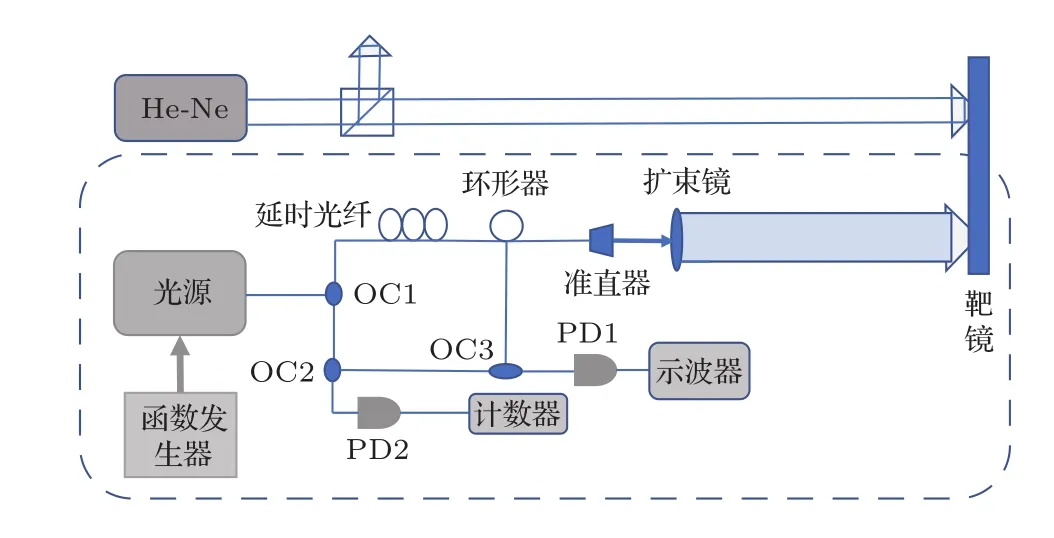
圖1 測距系統Fig.1.Experimental setup of the measurement system.
2.2 測距原理
光電探測器輸出信號強度可以表示為

其中Er(t)與Em(t)分別為參考光脈沖函數表達式與測量光脈沖函數表達式;E(t)為激光脈沖的包絡函數;ωc為脈沖中心角頻率;N為正整數;τ為測量光脈沖與參考光脈沖之間的時間延遲.其中(1)式的交流分量中的積分項為脈沖包絡的自相關函數[19].
光學頻率梳在真空中兩個脈沖時域之間的距離Lpp表示為

其中c為真空中的光速,fr為光學頻率梳的重復頻率.由(2)式能夠得到當測量距離與參考臂之間的距離滿足一定關系使兩個脈沖在空間中相互重疊時才能夠發生拍頻,OSCAT法正是通過掃描激光脈沖重復頻率的方式對脈沖之間的距離進行調節實現拍頻的方法.
實驗過程中首先通過測距系統得到He-Ne干涉儀的零點對應的測距結果L0,然后移動被測點,記錄移動過程中He-Ne干涉儀的測距結果與OSCAT測距系統的測距結果,被測點移動距離Lx可表示為

其中Lp為各個測量點得到的測距結果.
實驗得到互相關干涉條紋的包絡有兩個波峰,兩個波峰分別對應不同的掃描頻率.互相關干涉條紋上任意兩點之間的距離Ld可表示為

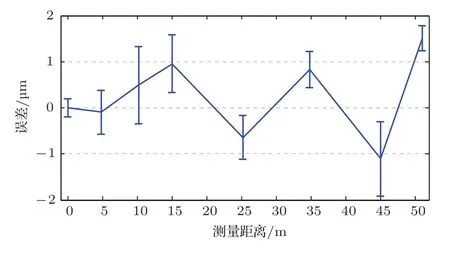
其中frp1與frp2分別為不同重復頻率,且frp1 其中Ldelay為延時光纖的長度,Lmea為待測距離的長度,Lref為參考臂長度,nf為光纖折射率,n為空氣折射率.由(4)式可得到測距系統的非模糊范圍,系統測距非模糊范圍由N及頻率掃描范圍決定.當frp1與frp2分別為兩個波峰對應的重頻時,則Ld為兩個波峰之間的距離.由(4)和(5)式能夠得到本測量系統的非模糊范圍隨著測距范圍的增大而增大.當出射光在空間傳播過程無折射率的影響時,即在真空條件下傳播時,脈沖不會產生變形,不同測量點互相關干涉條紋是相同的,即不同測量點得到的互相關條紋兩個峰值之間的距離Ld是不變的,這同時表明,通過標定得到互相關干涉條紋包絡兩個波峰之間的距離,就能夠在測距過程中通過測量其對應的重復頻率計算得到N,從而得到測距所需的全部未知量,實現單系統絕對測距. 在實際測量過程中發現在一個非模糊范圍內兩個峰值之間的距離變化量較大,這能夠反映非對稱性干涉條紋由于重復頻率變化帶來的峰值偏移誤差、干涉條紋與重復頻率采樣同步性帶來的誤差以及測量系統穩定性帶來的誤差.通過測量非對稱互相關條紋希爾伯特變換的兩個波峰所對應的掃描頻率的變化,對測距結果進行補償能夠有效地提高測距精度. 經過測量參考激光脈沖寬度為730 fs,測量激光脈沖寬度為180 fs,因此測量激光脈沖與參考激光脈沖的互相關干涉條紋的寬度大約為910 fs,即互相關干涉條紋在時域上的寬度約為273μm.測量過程得到不同位置下互相關條紋如圖2所示,測量環境條件為溫度17.71?C,壓強995.80 Pa,濕度42.90%,基于Edlen公式[20]得到空氣折射率為1.0002829. 由圖2中互相關干涉條紋可明顯得到,兩個波峰之間的頻率差隨著測量距離的增加而減小,這與(4)式的分析結果相同,即隨著N的增加,通過減小兩個波峰之間的頻率差來保持互相關條紋波峰時域上距離的不變.互相關條紋的強度隨測量距離的增加而衰減.兩波峰之間距離的測量值如圖3所示. 圖2 不同位置的互相關干涉條紋Fig.2.Cross-correlation patterns at different positions. 未補償的測距誤差有較明顯的系統誤差,經過相關性分析能夠得到,峰值距離變化量與互相關條紋兩個峰值之間的距離有較強的相關性,因此可通過互相關條紋兩個波峰之間的距離的變化來修正測距系統誤差.誤差補償表示為 其中δ1為補償后的測距誤差,δ0為未補償的測距誤差,?d為峰值間距的變化量,p為比例系數.通過選擇比例系數的值來達到較好的補償效果,使補償后的誤差與峰值距離的變化量不相關,或相關性很弱.在5 m與35 m位置非模糊范圍內比例系數p分別為0.32與0.60. 誤差補償結果如圖4所示,圖4(a)和圖4(b)分別為在5 m與35 m位置非模糊范圍內的測距誤差.由補償結果能夠得到通過互相關條紋兩個波峰之間距離的抖動對測距結果進行補償,進而明顯地減小測距誤差,且隨著測量距離的增加測距系統的非模糊范圍在增加,與(4)和(5)式分析結果相同. 圖3 非模糊范圍內的峰值距離Fig.3.Distance between two peaks in non-ambiguity range. 圖4 誤差補償Fig.4.Correction of deviation. 在0—50 m范圍內不同位置進行了8次實驗測量,測量結果如圖5所示,實驗結果表明本實驗系統能夠在50 m范圍內實現誤差為2μm的絕對測距.實驗中測距的誤差來源有重復頻率的測量誤差、光纖抖動的誤差及空氣折射率的測量誤差,其中光纖抖動的測量誤差較小且能夠通過濾波有效地抑制,因此測距誤差主要由重復頻率測量誤差及空氣折射率的誤差決定,頻率測量的誤差主要由頻率測量速度與頻率掃描速度之間的關系決定,可以通過提高頻率測量速度或者降低頻率掃描速度直接降低重復頻率的測量誤差.本系統頻率測量誤差?f為23 Hz,帶來的測距不確定度約為9.2×10?8×L(L為光程),空氣折射率溫度不確定度為15 mK,壓強不確定度為5.3 Pa,濕度不確定度為0.13%,取擴展因子為2時合成不確定度為2.76×10?8×L.得到綜合測距不確定度為進而可知在50 m范圍內測距相對誤差為1.9×10?7. 圖5 遠距離測量結果Fig.5.Experimental results of the long-distance measurement. 本實驗通過掃描光學頻率梳的重復頻率得到非對稱互相關干涉條紋,并通過非對稱互相關條紋希爾伯特變換得到的兩個波峰距離理論上的穩定性,提出待測距離中包含脈沖間隔數N的可行性測量方式,當測量系統穩定性較高時能夠實現整數N的測量,從而得到一種基于非對稱脈沖互相關單系統測距的方案.實驗使用非對稱互相關條紋進行測距,并通過互相關條紋兩個波峰之間的距離變化對測距結果進行補償,實驗結果表明該實驗系統能夠實現50 m范圍內誤差為2μm的高精度測量,測量相對誤差為1.9×10?7.
3 測量結果




4 結 論
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45