聲速剖面未知條件下的平均聲速計算方法?
2018-11-26 07:55:14孫文舟
艦船電子工程 2018年11期
關鍵詞:方法
趙 翀 孫文舟
(1.西安測繪總站 西安 710054)(2.海軍大連艦艇學院海洋測繪系 大連 116018)
1 引言
海水聲速的變化與溫度、鹽度、壓力有著密切的關系,由于這三種影響因素主要隨深度方向發生變化,所以通常的聲速剖面僅考慮沿深度方向的變化。Harmonic平均聲速的計算方法便是基于這一觀點,在已知實測聲速剖面的前提下,層內采用常梯度聲速模型的方法計算傳播時間,從而得出波束經歷整個水柱的傳播時間和平均聲速[1]。因為層內傳播時間的計算是在波束垂直發射的情況下,所以聲線不發射彎曲。而當入射角不為0°時,聲線實際沿弧線軌跡傳播而非Harmonic。
平均聲速認為的直線傳播,因此會帶來一定的誤差,陸秀平等對此作出了改進[2],層內傳播時間的計算采用圓弧微元代替直線微元,其仿真實驗表明,改進后的方法波束腳印位置的計算精度得到提高,對入射角較大的波束改進的效果更加明顯。然而這兩種方法對平均聲速的計算都依賴于實測的聲速剖面,而在實際的工程測量中往往僅以某一次的實測聲速剖面代表某一海域特定時間段內的聲速剖面,由于聲速具有空變性和時變性的特點[3]。這種簡化方式必然會引起其他時刻的平均聲速誤差,而且目前尚未有一種在聲速剖面未知條件下計算平均聲速的方法,通常則采用海水聲速的標準值1500 m/s。
針對上述問題本文提出了一種不依賴于聲速剖面的平均聲速計算方法,該方法基于等效聲速剖面法的原理,用某一常梯度聲速剖面代替實際聲速剖面,通過聲波垂直發射到達海底的傳播時間計算等效聲速剖面的梯度值,進而計算與常聲速剖面的相對面積差,利用相對面積差推導得出聲源處與測點之間的幾何距離,從而得出平均聲速值。因為新的方法不依賴于實際的聲速剖面,且不受聲速時變性和空變性的影響,所以在一些聲速剖面無法獲得和聲速剖面變化劇烈的情況下,本文提出的方法對水下目標定位精度的提高具有重要應用價值。
2 等效聲速剖面法原理
根據 Geng Xueyi和Zielinski的觀點[4],具有相同傳播時間、表層聲速、聲速剖面積分面積相同的聲速剖面族,其波束腳印位置的計算結果相同。
等效聲速剖面法以零梯度聲速剖面C0-CA作為參考聲速剖面,用常梯度聲速剖面C0-CB代替實際聲速剖面,相對面積差定義為
相對面積差通過下式計算:
其中εz為垂直位移相對誤差,α0為掠射角,ZB0為參考深度,為零梯度聲速剖面確定的深度,可以表示為=Z0+c0?T?sinα0,其中 c0為表層聲速,cB為測點聲速,T為傳播時間,Z0為換能器的吃水深度。
由εs計算等效梯度geq,等效聲速剖面對應傳播軌跡的曲率半徑Req:
測點的掠射角的正余線函數為[5]
垂直位移和水平位移分別為
3 聲速空變性對平均聲速計算的影響
聲速的空變性是指聲速在空間各處的數值分布不同,從而導致聲速在空間中沿曲線傳播,實際的傳播平均聲速為軌跡曲線段與傳播時間的比值。本文計算平均聲速采用直線段與傳播時間的比值,由此計算的平均聲速值定義為有效平均聲速,且根據(lurton 2002)、(Xu Peiliang 2005)以及如下的仿真實驗驗證,有效聲速的數值近似于真實的平均聲速值[6~7]。
CH為平均聲速,pij為i點與j點的實際傳播軌跡,f(Xi,Xj)為i點與j點之間的幾何距離。
圖2 為某一實測的聲速剖面,深度3000m,采樣間隔為5m,圖3是根據常梯度聲線跟蹤算法計算的實際傳播距離與幾何距離的誤差,在入射角為15°、30°、45°、60°的條件下,平均誤差分別為斜距的0.003‰、0.014‰、0.040‰、0.100‰。圖4為兩種方法計算平均聲速的誤差,從中可以看出平均聲速的誤差與入射角度有關,入射角越大,平均聲速誤差越大,對比圖2、3可以得出,平均聲速誤差還與聲速的梯度值變化有關,梯度值越大,兩者之間的誤差越大,在由負梯度變為正梯度的節點,平均聲速誤差達到最大。但誤差數值都較小,因此用直線幾何距離代替實際傳播距離計算平均聲速的方法所得出的有效聲速值近似于真實聲速值。
在c1~c8構成的指標體系中,專業素質和科研創新素質可以作為獎勵和懲罰的主要依據,也可以作為促進的依據。而德育素質和其他素質可以作為高校進行決策的重要依據。通過分析總體情況和個別學生的綜合值,為改進和提高其綜合素質提供了良好的基礎。
4 不依賴于SVP的平均聲速的計算方法
聲波在海水中的傳播遵循snell法則[8],如果入射角聲波垂直發射,聲線將不發生彎曲,此時,等效聲速剖面法等價于常梯度聲線跟蹤法,兩種方法計算的聲波到達海底的傳播時間相等,滿足如下公式[9]:
式(11)中僅有geq一個未知數,通過求解該方程即可獲得等效聲速剖面的梯度值,若垂直波束的傳播時間無法獲得,則tm可以通過下式近似計算[10]:
根據tm計算相對面積差εs:
等效聲速剖面對應傳播軌跡的曲率半徑Req為
測點處掠射角的正弦函數和余弦函數為
根據式(8)和式(9)分別計算垂直位移和水平位移,則得到換能器與測點之間的幾何距離:
由式(10)計算平均聲速。
5 仿真實驗
5.1 仿真實驗一
為驗證新方法計算平均聲速是否可行,通過仿真實驗將新方法與Harmonic平均聲速以及常梯度聲線跟蹤方法進行對比。選用圖2聲速剖面,水層深度為3000 m,入射角選取范圍為0°~60°,每隔5°確定一個入射角,共選取13個入射角。分別用三種方法計算不同入射角條件下平均聲速的數值,如圖5所示,并以常梯度聲線跟蹤算法計算的傳播時間和平均聲速為“真值”,得到新方法在不同入射角條件下的平均聲速誤差,如圖6、7所示,常梯度聲線跟蹤算法計算波束腳印水平位移和傳播時間的公式為
Ch是Harmonic平均聲速,Ca是常梯度聲線跟蹤算法計算的平均聲速,Ce是本文提出的新方法計算的平均聲速,圖5是三種方法計算的平均聲速與入射角的關系,若以常梯度聲線跟蹤算法計算的平均聲速為“真值”,新方法與Harmonic平均聲速誤差隨入射角增大而增大。在聲波經歷的水層深度為3000 m,入射角55°以內時,Harmonic平均聲速的誤差可以達到0.1 m/s以內,新方法入射角在25°以內時,平均聲速誤差可以達到0.1 m/s以內,入射角在47°以內時,聲速誤差在1m/s以內。47°之后誤差開始急劇發散。誤差的增加主要由兩方面原因造成,一是入射角角度的增加引起測距誤差的增加,二是在入射角角度增大的情況下,等效聲速法計算的直線幾何距離誤差增大。
圖6是三種方法在入射角為0°、20°、40°60°條件下平均聲速與深度的關系,圖7是新方法計算的平均聲速的誤差。同樣以常梯度聲線跟蹤算法計算的平均聲速為“真值”。入射角為0°時誤差均為0,表明三種方法在此條件下是等效的,入射角為20°時,平均聲速誤差小于0.06 m/s,入射角為40°時,平均聲速誤差小于0.5 m/s,入射角為60°時,平均聲速誤差小于4.5 m/s。
5.2 仿真實驗二
為驗證新方法在水聲定位中對測距誤差改正的有效性,設計走航式的圓航跡單點水下定位仿真實驗。定位方法一般利用GPS技術結合聲學測量手段[11~13],測量船以海底應答器為圓心,水深為半徑的圓航跡航行,觀測不同時間歷元船底換能器到應答器的距離,通過球面交匯的方式確定海底應答器的位置[14~16],定位的觀測方程通常表示為[17]
pi是第i時刻測量船的位置到海底應答器聲波的傳播距離;f(Xi,Xo)是兩者之間的幾何直線距離,Xi是第i時刻測量船的位置,Xo是海底應答器的位置;δpdi是由應答器電路延遲引起的系統性誤差,一般可以忽略;δpvi是聲速變化引起的系統性誤差,為主要誤差;εi是第i時刻測量的隨機誤差。
仿真實驗采用圖2所示的聲速剖面,并模擬真實海域,水域潮汐周期為12h,潮高5m,波浪周期為12s,波高2m。水面測量船的位置由GPS確定,定位精度水平方向5cm,垂直方向10cm,測時精度5μs。測量船航行速度為4節(約2m/s),采樣周期為10s,共得到945個采樣點。測量船到應答器的傳播時間可通過實際聲速剖面和常梯度聲線跟蹤算法確定[18~19]。
聲速變化引起的測距誤差的仿真采用與文獻[7]相同的方法,誤差共包括4項:1)常數項;2)由短周期內波引起的誤差;3)由長周期潮汐引起的誤差;4)與測區因素相關的誤差:誤差的單位為cm。
在測量的時間段內,根據δpv確定各個時刻的真實平均聲速和由新方法計算的平均聲速如圖8所示,Cr為真實的平均聲速。由圖中可以看出新方法計算得到的平均聲速值可以準確地反映真實聲速的變化規律。
傳統的方法計算pi通常采用表層聲速或有效聲速與傳播時間的乘積確定,本文采用的是有效聲速,有效聲速是測量船與應答器之間幾何距離除以傳播時間。新方法采用的是每個時刻的平均聲速與傳播時間的乘積。分別仿真考慮與不考慮δpv的兩種情況。
表1是不考慮δpv,即在觀測時間段內聲速剖面不發生變化情況下兩種方法的計算結果,結果表明兩種方法的定位精度基本相同,表2是考慮δpv,即在觀測時間段內真實平均聲速以圖8曲線變化情況下兩種方法的計算結果,結果表明新方法的定位精度遠高于傳統的方法。對比兩種情況可得出結論,傳統方法的定位精度受聲速變化引起的測距誤差δpv影響較嚴重,特別是在垂直方向上,而新方法受δpv影響的程度遠小于傳統的方法,水平方向仍然可以達到較高的精度,而垂直方向的精度仍然可以達到亞米級。
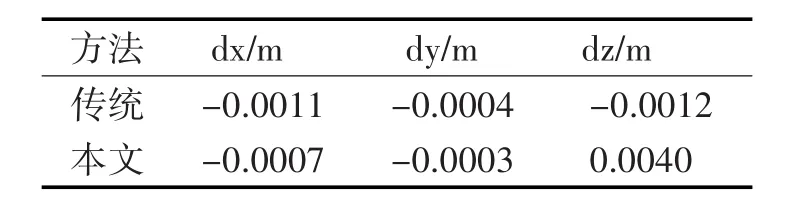
表1 不考慮測距誤差兩種方法的定位結果
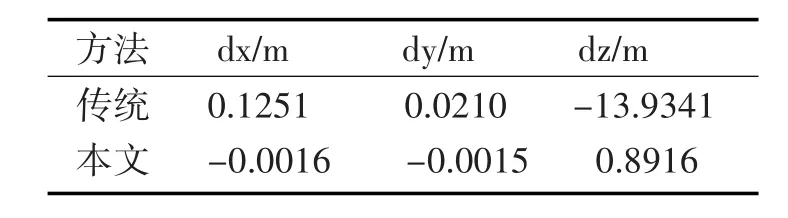
表2 考慮測距誤差兩種方法的定位結果
6 結語
受洋流、潮汐、海洋表層溫度等因素的影響,海水的聲速剖面結構不斷處于復雜的變化之中,以某一時刻獲得的聲速剖面結構代替整個時間序列上的聲速剖面必然會引入由聲速時變性帶來的誤差,且目前尚未存在一種不依賴于聲速剖面的平均聲速的計算方法,針對以上問題,本文提出了一種基于等效聲速剖面法,利用傳播時間計算平均聲速的方法,并得出了以下結論。
1)相比于海水標準聲速值,本文提出的新方法計算的平均海水聲速的精度得到大幅度提高。
2)相比于Harmonic平均聲速的計算方法,新方法不依賴于實測的聲速剖面,因此省去了測量聲速剖面的煩雜過程,大大提高了工作效率。
3)新方法計算平均聲速誤差與深度和入射角有關,在深度為3000 m,入射角為47°以內。平均聲速計算的誤差在1 m/s以內。深度為500 m,入射角為45°時,計算誤差在0.1 m/s以內。
4)新方法平均聲速的計算基于每個時刻聲波垂直發射到達海底的時間,不依賴于實際的聲速剖面,但可以準確反映聲速在時間序列上的變化規律,因此不受聲速變化引起的測距誤差δpv的影響,從而大大提高了水下目標的定位精度。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56