基于高斯-牛頓法的水下導航系統校準算法研究
2018-11-26 07:55:02吳媛媛郭錦標
艦船電子工程 2018年11期
吳媛媛 張 森 郭錦標
(1.中國人民解放軍31003部隊 北京 100089)(2.海軍工程大學 武漢 430033)
1 引言
隨著國家發展戰略對海洋的開發和利用的需求不斷提升,對水下導航定位系統的要求也越來越高:低成本、使用和布放回收方便、允許任意數量接入的用戶等[1~3]。基于單個信標的水下導航系統因其成本低、布放回收方便等優點在海洋的開發和利用中越來越受到關注,因此研究價值也越來越高[4]。
多正交信號水下導航系統[5]通過一個信標同時發射一組正交信號,使得接收端接收到信號就可以解算自身的位置,系統由水下的聲學設備和船上的信號處理設備及GPS等組成,如圖1所示。
由于在布放信標時,信標的精確位置不得而知,并且信標會出現一定的傾斜,接收端需要獲知信標的精確位置和傾斜數據,以此修正解算值。信標的位置信息和傾角信息是導航系統位置解算的必須數據,因此通過校準獲得信標的地理坐標和偏角是多正交信號水下導航系統的一項關鍵技術。
國內最早由唐秋華等[6]提出超短基線定位系統的校準算法,它是將安裝校準的三個旋轉角度偏差和三個位移偏差等效作參數估計問題,在最小二乘準則下估計各個量的值,并對其進行優化。哈爾濱工程大學的楊國保[7]將聲線彎曲、校準航跡作為影響校準穩健性的因素,提出了改進的估計方法和數值解法,提高了校準的穩健性。多正交信號水下導航系統是由海軍工程大學水聲技術研究所張森團隊首次提出,關于該系統的校準算法目前還未有專門文獻記載研究。本文借鑒超短基線聲學定位系統的校準算法思想[6,8],提出了最小二乘準則下基于高斯-牛頓法的多正交信號水下導航系統的校準算法。
2 信標的位置估計
信標投擲于水下時概略地記錄下投入點的地理坐標,信標源與接收端之間看成是兩點之間的直線距離。船繞著信標航行,在每個測量點上通過水聽器接收信號,獲得時延信息,用聲學方法可以測量出信標源與接收端的距離。應用空間測距交會的原理,可以求解出水下信標在大地坐標系下的坐標( )
X,Y,Z。
在得到每個觀測點與信標的距離后,應用基于高斯-牛頓法的最小二乘原理[9]計算出信標的坐標位置,具體計算方法如下:
1)應用空間定位的測距交會原理列出觀測方程為
其中,X,Y,Z為待求的水下信標在大地坐標系下的坐標,Xi、Yi、Zi(i =0,1,…n)為接收端(水聽器)在大地坐標系的坐標(n為船測量的次數),Si為利用聲學方法測出的信標與水聽器的距離。
2)利用一階泰勒公式展開原理就可由觀測方程列出誤差方程
將式(1)在初值處線性化后可以得到下式:
式中,X0,Y0,Z0為水下信標在大地坐標系下的概略坐標值。
3)根據最小二乘原理求解
求未知參數X?的最小二乘估計,就是尋求X?的一個估值,使:
其中P為觀測值的權矩陣,一般都認為是等權觀測,即P為單位矩陣。為此將式(5)對 X?求一階導數并令其為零,得到:
將式(4)代入到式(6)得到:
則可以得到:
求得X?后則可以根據:
通過迭代計算得使得改正值達到規定的誤差限,即可得到水下信標的精確地理坐標。
3 信標的姿態估計
在得到信標的大地坐標后,根據基陣坐標系與大地坐標系之間的轉換關系[10],可以得到:
其中A為方位角、κ為縱搖角、φ為橫搖角。為方便表示,令
利用最小二乘法計算三個偏角的具體方法如下:
(1)對式(11)利用多元函數的泰勒公式展開,并取其一次項[11],即
式中X0,Y0,Z0為多元函數的初始值,將上式寫成誤差方程式為
式中,x',y',z'為基陣坐標系在初始的旋轉角度A0,κ0,φ0(可以假設為零)求得。
(2)假設需要求解的三個參數 A,κ,φ都是在較小值的情況下,則式(15)在 A,κ,φ均用零為近似值代入,則:
(3)將誤差方程式(17)表示成矩陣的形式為
經過N次測量,則可列N個誤差方程,寫成矩陣形式則可以表示為
根據最小二乘法原理,可求得誤差方程式的解為
將已知的參數代入方程式,即可求出初始旋轉角度的改正值Δφ,Δκ,ΔA,將其加到初始值上得到新的近似值:
將得到的近似值再次作為初始值,重新建立新的誤差方程式,再次求解改正值,直到各個改正值小于規定的限差值為止。
4 校準算法仿真分析
4.1 航跡的仿真
仿真實驗假定船的航行軌跡為“⊕”,在圓周和兩條相交直徑上取均勻的觀察點,以船的航行軌跡圓的圓心為坐標原點,海平面深度為0,向下為正,船的測量點的軌跡在水下信標位置周圍繞行,如圖2所示。
4.2 信標的位置估計
假定實際信標位置的大地坐標為(50,100,500),規定算法的誤差限為1m 。研究GPS測量誤差和接收端時延誤差對估計的影響。
GPS存在測量誤差,接收端的時延測量也會產生隨機誤差,且這些隨機誤差服從均值為零的高斯分布[12]。從圖3(a)可以看出位置估計誤差大小與GPS測量誤差成正比;接收端的時延誤差使得信標與水聽器的距離發生偏差。同樣位置估計誤差大小與距離誤差成正比,如圖3(b)所示。
4.3 信標的姿態估計
觀察算法在不同偏角下的估計結果,并將得到的估計結果解算得到船的地理坐標,GPS測量誤差1m,接收端的時延誤差1μs,得到在水平方向定位誤差的均方值,具體數據如表1所示。
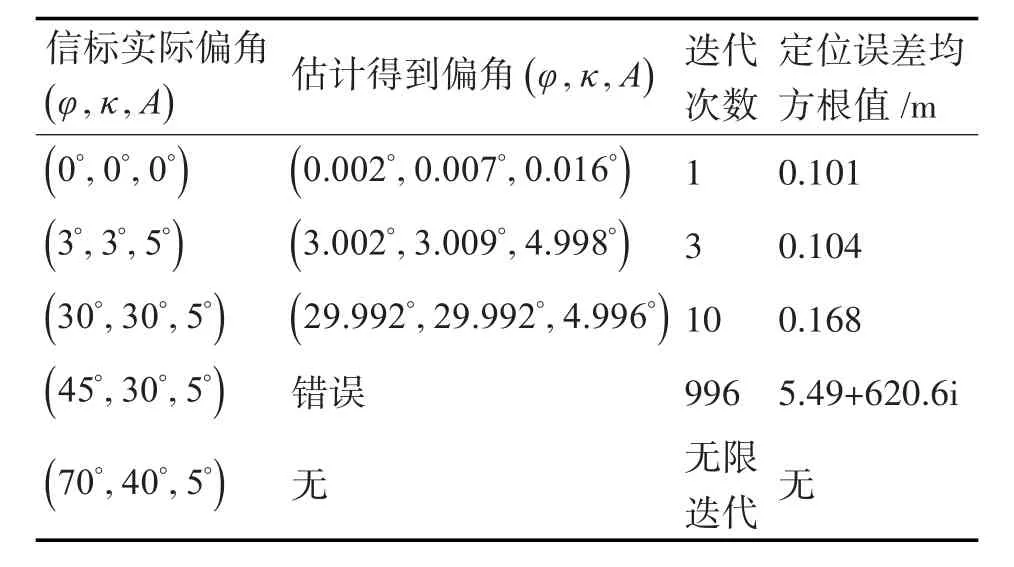
表1 姿態估計結果
5 結語
本文研究了基于高斯-牛頓法的多正交信號水下導航系統的校準算法,通過仿真分析可以得到以下結論:
1)位置估計對初值的依賴不敏感,估計的誤差大小與GPS測量誤差和時延測量誤差大小成正比;
2)小角度的估計具有很強的穩健性,算法所需少次迭代次數,但是當水下信標偏角不是小角度時,此姿態估計算法不再適用。