移動機器人目標識別系統研究
2018-11-21 11:47:12宋廣春王紅星李堅王卓陳虎
科技視界 2018年20期
關鍵詞:移動機器人
宋廣春 王紅星 李堅 王卓 陳虎

【摘 要】移動機器人實現目標識別是機器人發展過程中非常重要的一個環節。本文主要研究內容是在移動機器人上通過攝像機連接視頻采集卡獲取外界視頻信息,然后使用MATLAB編程軟件對所選的圖像進行圖像處理,采用圖像和幾何外形相結合方法對目標進行識別,其中攝像頭標定采用張正友標定法。仿真和實驗效果都較理想。
【關鍵詞】移動機器人;基于顏色和外形相結合目標識別;攝影機標定
中圖分類號: TP242 文獻標識碼: A 文章編號: 2095-2457(2018)20-0097-002
DOI:10.19694/j.cnki.issn2095-2457.2018.20.042
【Abstract】It is very important for mobile robot to realize target recognition in the process of robot development. The article describes the use of video capture card to capture external video information on a mobile robot, and then uses MATLAB programming software to perform image processing on the selected image. The image and geometric shape are used to identify the target. The camera calibration uses Zhang Zhengyou. Calibration method. Both simulation and experimental results are ideal.
【Key words】Mobile robot; Combined with target recognition based on color and shape; Camera calibration
0 引言
通過視覺,人類可以感知外界物體的大小、特征、顏色、狀態等信息,視覺是人類傳遞信息的重要媒介和手段。于是人類需賦予機器人人類視覺的功能,才能讓機器人去模仿人類的各種行為。基于單目視覺傳感器的原理,本文中使用一個索尼EVI-D100P攝相機,結構簡單、計算簡潔、標定容易等優點深受大眾喜愛。
1 實驗原理
1.1 張正友攝像機標定
張正友此前提出了一種介于傳統標定和相機自標定的標定方法[1]。使用相機從不同的方位拍攝標定版,一般取十幅圖片或者二十幅圖片,再使用MATLAB軟件自帶相機標定工具對圖像處理,再計算出相機的內部參數矩陣。
在標定板上的每一個特征點(Harris算法提取的角點)與其圖像上相應的像點之間存在一一對應關系,這個關系可用單應矩陣表示,所以對于每幅圖像,就都可以確定一個單應矩陣,這就為內部參數的求解提供了約束條件。該算法是基于兩步法的思想,即先由一個線性解法求出部分參數的初始值,然后考慮徑向畸變并基于極大似然準則對線性結果進行非線性優化,最后利用計算好的內部參數和單應矩陣求出外部參數[2]。具體的標定數學推導和標定步驟可參考[3]。
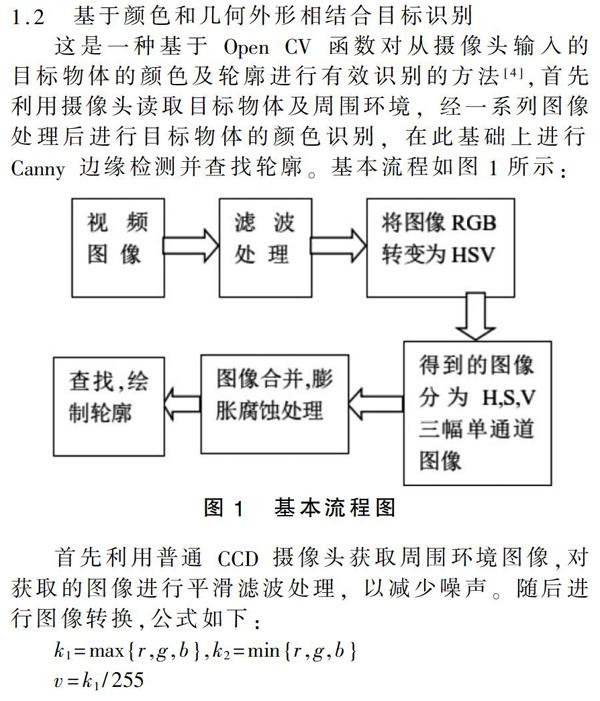
1.2 基于顏色和幾何外形相結合目標識別
接下來對得到的HSV圖像進行通道分離,分離為3個單通道圖像,分別為H(色度通道圖像)、S(飽和度通道圖像)及V(亮度通道圖像)。
設定6個調節參數:Low Hue(色度下限值)、High Hue(色度上限值)、Low Saturation(飽和度下限值)、High Saturation(飽和度上限值)、Low Brightness(亮度下 限值)、int High Brightness(亮度上限值)。通過此法可確定想要的目標的顏色HSV特征值。
圖像生成及圖像形態學處理:程序采用了先膨脹后腐蝕的方法,有效去除了被檢測到物體的邊緣噪點及其他噪聲影響。
最后用Canny算法查找和繪制輪廓。
2 實驗
2.1 標定過程和結果
2.2 基于顏色和幾何外形相結合目標識別
由于本次被測物體較小且可能攝像機與被測目標物體較遠,所以會在成像平面上成像較小,所以邊緣檢測到的圓也比較小甚至為不規則的圓,為保證能夠準確檢測到目標物體,所以本課題在設置對應閾值時設置的數值較小。
通過邊緣檢測對顏色分割后物體的邊緣提取,接下來通過霍夫圓變換提取幾何圓,通過數學運算輸出中心坐標,效果圖如圖3。
3 總結
(1)本論文在本文所研究的定位系統采用了目前世界上比較流行的圖像采集卡和索尼攝像機來完成視頻的讀取,在此基礎上實現了各種數字圖像的算法和圖像的處理。
(2)本文應用MATLAB軟件開發平臺進行系統的軟件部分設計,編寫了攝像機標定的程序、對圖像處理的程序以及對目標提取來完成識別程序。而且此做法達到了預期的要求。
對視頻中提取出來的圖像存在不足之處:由于是分開實行的,沒有做到一步到位,稍顯繁瑣。攝像機標定過程是基于張正友的標定板法,在此過程不能確定相機的內參數矩陣的準確性,因為對標定板的拍攝是存在不良操作的,移動相機的過程會影響圖片的提取。
【參考文獻】
[1]霍長娟,張樺,鄧熹.幾種攝像機標定方法的比較[J].天津理工大學學報,2007,23(5):75-77.
[2]游迪,楊世洪,趙汝進,等.高階徑向畸變對張正友平面標定算法精度的影響[J].計算機與現代化,2016(8):118-122.
[3]遲德霞,王洋,寧立群,等.張正友法的攝像機標定試驗[J].中國農機化學報,2015,36(2):287-289.
[4]侯賓,張文志,戴源成,田洪強.基于OpenCV的目標物體顏色及輪廓的識別方法[J].現代電子技術,2014,37(24):76-79+83.
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
中國慣性技術學報(2019年3期)2019-10-15 07:21:02
電子測試(2018年15期)2018-09-26 06:01:34
制造技術與機床(2017年3期)2017-06-23 08:11:21
智能系統學報(2015年4期)2015-12-27 09:38:35
機電產品開發與創新(2014年5期)2014-03-11 16:42:32
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:09
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19