多傳感器協(xié)同的擦黑板機(jī)器人系統(tǒng)研制
2018-11-21 08:37:20周雨松熊田忠
自動化儀表 2018年11期
周雨松,熊田忠
(1.南通大學(xué)電氣工程學(xué)院,江蘇 南通 226019;2.南京航空航天大學(xué)機(jī)電學(xué)院,江蘇 南京 210016;3.三江學(xué)院機(jī)械與電氣工程學(xué)院,江蘇 南京 210012)
0 引言
目前,廣泛應(yīng)用于教學(xué)環(huán)境的人工黑板擦效率低且無法控制粉筆灰[1]。普通黑板擦質(zhì)量差,損壞后無法循環(huán)使用,導(dǎo)致資源浪費[2]。黑板擦絨布上的粉塵不便于清潔,清潔過程中使空氣中的粉塵再次增多,影響清潔者的健康[3-4]。
爬壁機(jī)器人被廣泛應(yīng)用在工業(yè)等領(lǐng)域,但由于體積大、質(zhì)量重,不適合在教學(xué)環(huán)境中使用[5-9];不少爬壁機(jī)器人結(jié)構(gòu)復(fù)雜、材料特殊、開發(fā)成本高,難以市場化[10-14];因電源問題需要帶纜作業(yè),移動靈活性差,使用范圍小[15-20];在智能控制方面,自主正確處理突發(fā)狀況的能力不夠,無法在閉環(huán)跟蹤控制下完成任務(wù)[21]。
本文設(shè)計了一種工作環(huán)境為鐵磁性壁面的多傳感器協(xié)同擦黑板機(jī)器人系統(tǒng)。該機(jī)器人質(zhì)量輕、靈活性好、智能化程度高,符合節(jié)能和無纜化要求。
1 系統(tǒng)結(jié)構(gòu)分析與設(shè)計
1.1 系統(tǒng)整體結(jié)構(gòu)
本文所設(shè)計的擦黑板機(jī)器人系統(tǒng)整體結(jié)構(gòu)如圖1所示。

圖1 系統(tǒng)整體結(jié)構(gòu)圖
系統(tǒng)主要由擦黑板機(jī)器人、視覺監(jiān)控單元和移動終端三大部分組成。擦黑板機(jī)器人本體結(jié)構(gòu)如圖2所示。

圖2 機(jī)器人本體結(jié)構(gòu)圖
1.2 機(jī)械結(jié)構(gòu)分析與設(shè)計
1.2.1 受力分析
為簡化設(shè)計,假設(shè)擦黑板機(jī)器人本體結(jié)構(gòu)成中心對稱和軸對稱,四個車輪軸心連線為正方形;黑板平面內(nèi)機(jī)器人重心與形心重合,四個磁輪結(jié)構(gòu)相同,磁輪提供的吸附力均勻分布,忽略擦灰滾筒與黑板間的作用力;進(jìn)行靜力學(xué)分析時只考慮擦黑板機(jī)器人兩前輪或兩后輪軸線水平狀態(tài)下的情況。若該情況下機(jī)器人能可靠吸附于壁面表面并移動,那么其他吸附姿態(tài)下也能可靠吸附并移動。吸附于壁面時,機(jī)器人受力分析如圖3所示。

圖3 機(jī)器人受力分析圖
機(jī)器人靜止時,在垂直壁面方向和豎直方向上的所受合力均為零。此時存在重力和壁面對機(jī)器人上方的兩車輪的正壓力的合力矩,以及壁面對機(jī)器人下方兩車輪的正壓力的合力。當(dāng)這兩個合力矩相互抵消時,機(jī)器人能夠有效吸附在壁面上而不翻轉(zhuǎn),則機(jī)器人靜止在壁面上的力平衡方程如下:
X軸方向的合力∑X=0,即:
T-N11-N12-N21-N22=0
(1)
Y軸方向的合力∑Y=0,即:
G-F11-F12-F21-F22=0
(2)
F11≤μN(yùn)11
(3)
F12≤μN(yùn)12
(4)
F21≤μN(yùn)21
(5)
F22≤μN(yùn)22
(6)
式中:G為機(jī)器人質(zhì)量;T為磁輪產(chǎn)生的磁力;N11、N12、N21、N22為壁面對磁輪的反作用力;F11、F12、F21、F22為壁面對磁輪的向上的靜摩擦力;μ為磁輪和壁面之間的靜摩擦系數(shù)。
機(jī)器人靜止在壁面上時,車輪因為傳動機(jī)構(gòu)的傳動阻力作用不會轉(zhuǎn)動,從而導(dǎo)致車體下落。假設(shè)機(jī)器人和壁面之間只有單純的相對滑動,則上文提到的靜摩擦系數(shù)可視作滑動摩擦系數(shù)。根據(jù)對稱性假設(shè)N11=N12,設(shè)N1=N11=N12、N2=N21=N22,則:
T=2N1+2N2
(7)
由式(1)~式(7)可得出:
2N1μ+2N2μ≥G
(8)
(9)
由式(9)可知,磁輪提供的吸附力與機(jī)器人質(zhì)量成反比,機(jī)器人本體需要使用質(zhì)量輕、強(qiáng)度高的材料,同時磁輪表面需要使用摩擦系數(shù)較高材料,增強(qiáng)磁輪與黑板之間的靜摩擦力。
1.2.2 有效吸附與工作的要求
機(jī)器人吸附在黑板上不外翻的條件為合力矩∑MA=0,即:
(10)
式中:L1為相鄰兩個車輪軸心之間的距離;L2為機(jī)器人重心與壁面的距離。
則式(10)可化簡為:
(11)
由式(7)和式(11)得出:
(12)

(13)
由式(13)可知:在減小擦黑板機(jī)器人重心與壁面距離的同時增加相鄰車輪軸心距離,能夠降低對于磁鐵吸附力的要求。由式(8)、式(13)得出:
(14)
式中:k1為安全系數(shù),需要由機(jī)器人工作時的最大加速度、工作環(huán)境和制造精度等實際情況合理確定。
由式(11)、式(12)可得出:
(15)
圖3所示機(jī)器人在所有的工作姿態(tài)中,向上運動的姿態(tài)要求機(jī)器人位于下方的兩個驅(qū)動電機(jī)輸出轉(zhuǎn)矩最大,則電機(jī)正常工作時輸出轉(zhuǎn)矩M的條件為:
(16)
式中:k2為安全系數(shù),需要由機(jī)器人工作時的最大加速度、工作環(huán)境和制造精度等實際情況合理確定;R為車輪半徑;n為電機(jī)傳動機(jī)構(gòu)減速比;η為電機(jī)傳動效率。
此處忽略了擦拭滾筒與黑板作用時的排斥力和力矩,經(jīng)試驗該排斥力和力矩較小,也可通過試驗調(diào)整k1、k2兩個安全系數(shù)來滿足要求。
1.2.3 磁輪分析與制作
磁輪本體外緣上均勻鑲嵌一圈長方體強(qiáng)磁鐵條以提供磁力。所用磁鐵條與黑板接觸面的沿車輪圓周方向的寬度較小,磁鐵條越多,磁輪的外側(cè)面越平滑,機(jī)器人的運動阻力越小。為盡可能減小干擾,所安置磁鐵條的磁力線與壁面垂直且相鄰磁鐵條的磁場方向互逆。磁輪平面如圖4所示。

圖4 磁輪平面圖
另外,在鑲嵌過磁鐵條的車輪圓周表面裹一層薄薄的耐磨、防滑橡膠層,有利于增加擦黑板機(jī)器人與黑板面的摩擦系數(shù),提高安全系數(shù)。這樣既能防止磁輪打滑,又能對黑板面進(jìn)行保護(hù),也保證了磁輪對黑板的吸附力。磁輪3D模型如圖5所示。

圖5 磁輪3D模型
由實際測量,機(jī)器人本體尺寸為28 cm×15 cm×6.5 cm,車輪直徑為65 mm,質(zhì)量G=20 N,令L1=25 cm、L2=5 cm、k1=k2=1.5、μ=0.2。根據(jù)上文可知,當(dāng)T≥ 150 N時,機(jī)器人可以有效吸附并工作,即磁輪總共要提供最少150 N的磁力。選用型號為N-35磁鐵Nb-Fe-B釹鐵硼稀土材料磁體制作磁輪。磁鐵條尺寸25.4 mm×3.175 mm× 3.175 mm,最大工作溫度為80 ℃,表磁B約為1.2×104Gs。設(shè)與磁通密度正交的面積為S,則:
(17)
式中:F為單個磁輪所需要提供的吸附力。
根據(jù)實際,機(jī)器人工作時平均有4塊磁鐵與壁面表面接觸,則:
F總=4F=184.67 N
(18)
F總大于磁輪所需要提供的最小吸力,即該型號的磁鐵符合設(shè)計要求,機(jī)器人能夠有效吸附于壁面并正常工作。
1.2.4 擦灰、吸灰裝置分析與制作
擦灰、吸灰裝置如圖6所示。
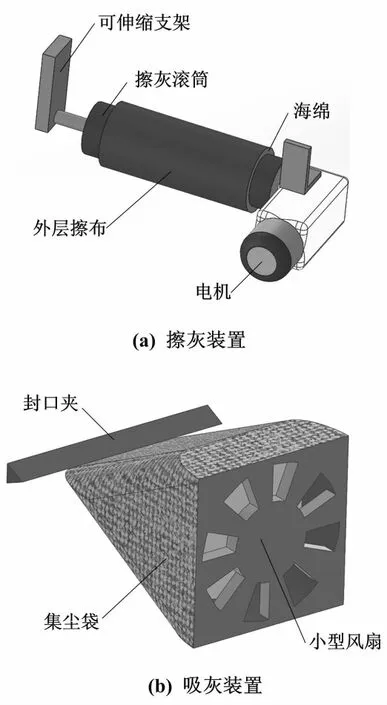
圖6 擦灰、吸灰裝置示意圖
擦黑板機(jī)器人的擦灰裝置使用可伸縮的固定支架和擦灰滾筒實現(xiàn)。擦灰滾筒的驅(qū)動減速電機(jī)型號為GA12N20 (12 VDC,負(fù)載轉(zhuǎn)速96 r/min,額定電流150 mA,減速比1∶250)。擦灰滾筒的軸線與車輪軸線平行,擦灰滾筒外層采用一定厚度的海綿等彈性物包裹,增大擦灰接觸面,提高適應(yīng)性;擦灰滾筒的最外層擦布通過尼龍搭扣可方便地實現(xiàn)更換、清洗,確保擦灰裝置的可循環(huán)使用。擦黑板機(jī)器人的吸灰裝置,使用小型風(fēng)扇和集塵袋實現(xiàn)。風(fēng)扇的額定電壓12 V,額定電流0.26 A,風(fēng)量23CFM,噪聲28 dB,轉(zhuǎn)速3 000 r/min,集塵袋采用無紡布制作。小型風(fēng)扇通過風(fēng)葉旋轉(zhuǎn)產(chǎn)生負(fù)壓,將擦灰滾筒擦灰產(chǎn)生的漂浮粉塵隨空氣一起吸入集塵袋,經(jīng)集塵袋過濾,排出干凈空氣,收集粉塵垃圾。
1.3 電機(jī)功率計算與選型
擦黑板機(jī)器人使用帶減速箱的直流驅(qū)動電機(jī),根據(jù)式(15)、式(16)可得出:
(19)
(20)
式中:k2為安全系數(shù),k2=1.5;μ為靜摩擦系數(shù),μ=0.2;n為減速比,n=120;η為傳動效率,η=0.8;v為機(jī)器人的工作時的運動速度平均,v=0.1 m/s;R為磁輪半徑,R=3 cm;ω為磁輪轉(zhuǎn)動角速度,ω1=3.33 rad/s。
設(shè)ω2為電機(jī)軸轉(zhuǎn)動角速度,則ω2=120ω1,代入式(21):
(21)
式中:P為機(jī)器人單個驅(qū)動電機(jī)需要的最小功率。
根據(jù)實際情況,選擇額定電壓為12 V,額定功率為3 W,傳動比為120∶1,轉(zhuǎn)矩為0.024 N·m的直流電機(jī)。
2 控制系統(tǒng)設(shè)計
2.1 系統(tǒng)工作流程
擦黑板機(jī)器人系統(tǒng)的控制優(yōu)先級設(shè)定為:機(jī)器人的自我保護(hù)控制優(yōu)先級最高,通過移動終端的人工控制優(yōu)先級次之,視覺監(jiān)控單元的自動控制優(yōu)先級最低。系統(tǒng)工作流程如圖7所示。

圖7 系統(tǒng)工作流程圖
擦黑板機(jī)器人的自我保護(hù)控制步驟為:紅外對管檢測擦黑板機(jī)器人相對于黑板面的垂直距離,當(dāng)垂直距離超出擦黑板機(jī)器人在黑板面上的平穩(wěn)移動距離,第一微控制單元發(fā)信號給驅(qū)動模塊控制電機(jī)停止、減速或轉(zhuǎn)向安全區(qū)域移動。
2.2 視覺監(jiān)控單元設(shè)計
視覺監(jiān)控單元主要包括固定于黑板正前方的攝像機(jī),其攝像頭采用大恒MER12530UML型工業(yè)相機(jī),最高像素1 292× 964、索尼電荷耦合元件傳感器、USB接口、COMPUTAR系列M1214MP型光學(xué)鏡頭;控制電路的MCU采用意法半導(dǎo)體STM32F107型微控制器,通信模塊采用HC05主從機(jī)一體藍(lán)牙模塊等。
2.2.1 圖像處理流程
視覺監(jiān)控單元圖像處理流程如圖8所示。

圖8 視覺監(jiān)控單元圖像處理流程圖
當(dāng)移動終端將控制方式切換為智能控制后,視覺監(jiān)控單元開始閉環(huán)控制操作。其中二值化處理的單個像素在0~255取值,令閾值為127.5,大于127.5的數(shù)置為255,否則置為0。中值濾波和均值濾波之后,對圖片中的目標(biāo)圖形(包括擦黑板機(jī)器人圖形和粉筆字圖形)進(jìn)行追蹤并標(biāo)記,提取面積和重心坐標(biāo)等二值特征。通過面積識別出機(jī)器人圖形和粉筆字圖形,計算機(jī)器人圖形和粉筆字圖形對應(yīng)重心的距離并判斷,由視覺監(jiān)控單元指示擦黑板機(jī)器人前進(jìn)至目標(biāo)點擦拭。視覺監(jiān)控單元不斷采集圖像跟蹤處理,直至采集的圖像中識別不出粉筆字圖形,完成智能擦黑板任務(wù),機(jī)器人回歸原點。
經(jīng)過二值化處理的圖形仍然存在許多噪點,這些噪點會增加擦黑板機(jī)器人的工作量,采用中值濾波以及均值濾波疊加使用進(jìn)行一定程度的降噪。本文中的中值濾波處理選用3×3的模板對其中所有像素排序,取中間數(shù)值代替原來的像素值。均值濾波的處理選用3×3的模板,以模板中全體像素的均值替換掉原來需處理像素的均值。
2.2.2 目標(biāo)圖形面積與重心計算
設(shè)Ki(xi,yi) (i=1,2,…,n)為圍成不規(guī)則圖形的頂點,則圖形K1K2,…,Kn的面積為:
(22)
令xn+1=x1,xn+1=x1。進(jìn)一步可得,該不規(guī)則多邊形K1K2,…,Kn的重心G(xG,yG)為:
(23)
2.2.3 重心距離計算
根據(jù)識別的目標(biāo)圖形的面積判斷擦黑板機(jī)器人圖形與粉筆字圖形,再由圖形的重心位置計算距離,以一個像素為單位,設(shè)擦黑板機(jī)器人圖形重心為(x1,y1),某一個粉筆字圖形的重心為(x2,y2),則兩者之間的距離為:
(24)
當(dāng)d>0時,視覺監(jiān)控單元發(fā)出指令,擦黑板機(jī)器人接收到指令后繼續(xù)擦灰;當(dāng)d=0時,視為擦黑板機(jī)器人對粉筆字完成擦拭。
3 試驗與分析
對于視覺監(jiān)控單元的閉環(huán)控制處理過程,通過在黑板上寫一行字進(jìn)行擦拭實際采集的圖片進(jìn)行分析。擦拭前視覺監(jiān)控單元圖像處理過程如圖9所示。

圖9 擦拭前視覺監(jiān)控單元圖像處理過程圖
擦拭前提取出的目標(biāo)圖形的二值特征中的面積與重心坐標(biāo)對應(yīng)關(guān)系如表1所示。

表1 擦拭前提取的對應(yīng)關(guān)系
表1中:1號為黑板圖形,2號是擦黑板機(jī)器人的圖形,其余為粉筆字的圖形。根據(jù)對應(yīng)的重心坐標(biāo)按照式(24)計算出距離,根據(jù)距離大小判斷是否執(zhí)行擦拭任務(wù)。
部分擦拭后視覺監(jiān)控單元采集并處理黑板圖像的過程圖如圖10所示。從圖10可以看出,擦拭后粉筆字仍有部分殘留,視覺監(jiān)控單元會再次命令機(jī)器人進(jìn)行擦拭,直至完全擦干凈為止。

圖10 部分擦拭后視覺監(jiān)控單元圖像處理過程圖
擦拭后提取的目標(biāo)圖形的面積與重心坐標(biāo)對應(yīng)關(guān)系如表2所示。表2中:1號仍然代表黑板板面圖形;2號為擦黑板機(jī)器人的圖形面積。由于在二值化過程中、濾波處理過程中以及機(jī)器人行走過程中角度的變化等原因,表1與表2的黑板板面面積以及擦黑板機(jī)器人的面積存在誤差,但這并不影響對于目標(biāo)的判斷,因此不會影響擦黑板機(jī)器人完成擦拭任務(wù)。
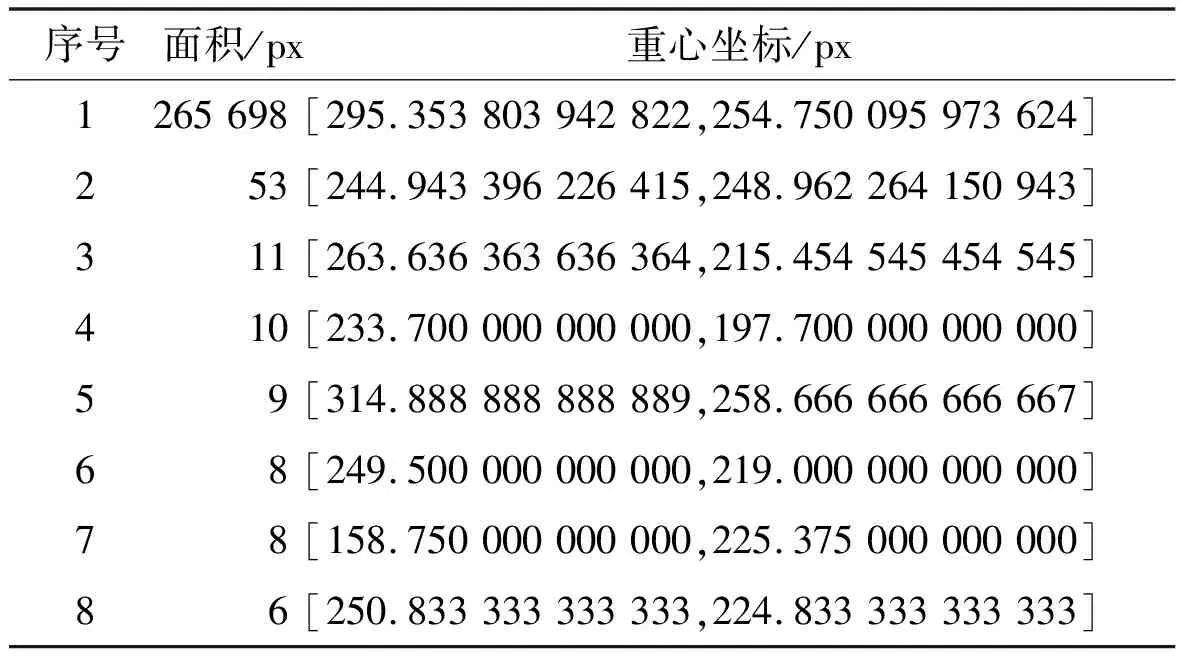
表2 擦拭后提取的對應(yīng)關(guān)系
4 結(jié)束語
本文設(shè)計了一種多傳感器協(xié)同工作的擦黑板機(jī)器人系統(tǒng)。機(jī)器人本體、視覺監(jiān)控單元和移動終端相互配合工作以及人工和自主雙模式的控制方式,有效提升了機(jī)器人的智能化水平和環(huán)境適應(yīng)能力。簡化的靜力學(xué)分析方法,通過調(diào)整相關(guān)參數(shù)來滿足動力學(xué)要求。相對于多姿式動態(tài)分析、靜力學(xué)分析方法降低了計算復(fù)雜度。視覺監(jiān)控單元提取圖像的面積與重心二值特征,根據(jù)機(jī)器人圖形重心與目標(biāo)圖形重心距離,實現(xiàn)閉環(huán)連續(xù)跟蹤控制,保證了對黑板的智能、高效、環(huán)保的擦拭,具有良好的應(yīng)用前景。
