基于MEMS/UWB組合的室內(nèi)定位方法
2018-11-21 03:35:00郁嘉宇黃思文
導(dǎo)航定位與授時(shí) 2018年6期
郁嘉宇,趙 忠,李 凡,黃思文
(西北工業(yè)大學(xué)自動(dòng)化學(xué)院,西安 710072)
0 引言
隨著人們生活水平的不斷提高,各種通信和定位技術(shù)也在不斷發(fā)展和完善,復(fù)雜的道路網(wǎng)絡(luò)和空間結(jié)構(gòu)帶給人們生活和工作的壓力,使得人們對(duì)定位的需求愈加強(qiáng)烈[1]。根據(jù)范圍和場(chǎng)景,定位可分為室內(nèi)定位和室外定位。室外定位技術(shù)主要借助于全球?qū)Ш叫l(wèi)星系統(tǒng)(Global Navigation Satellite System, GNSS),利用衛(wèi)星和移動(dòng)對(duì)象之間的直接通信,可完成精確定位[2]。而對(duì)于室內(nèi)場(chǎng)景,GNSS信號(hào)易受遮擋,無法實(shí)現(xiàn)定位。
現(xiàn)已出現(xiàn)多種室內(nèi)定位解決方案,包括紅外線、射頻識(shí)別、視覺、WiFi、藍(lán)牙信標(biāo)(如iBeacon)、超聲波、LED信標(biāo)、地磁場(chǎng)、超寬帶(Ultra-Wide Bandwidth, UWB)及微慣性器件等定位技術(shù)[3-4]。它們都有各自的優(yōu)勢(shì)和不足。
UWB定位系統(tǒng)具有功耗低、抗多路徑效應(yīng)效果好、安全性高、信號(hào)穿透力好等優(yōu)點(diǎn);但其不提供姿態(tài)信息,動(dòng)態(tài)范圍和魯棒性較差,對(duì)外界硬件設(shè)施依賴程度較高,存在信號(hào)遮擋(鐵材料和結(jié)構(gòu)復(fù)雜的混凝土墻壁等)、信號(hào)作用距離有限、信號(hào)易被吸收和成本高等問題。微機(jī)電系統(tǒng)(Micro-Electro-Mechanical System,MEMS)定位精度與慣性器件本身精度密切相關(guān),不易受環(huán)境干擾、獨(dú)立工作能力強(qiáng)、短期精度高,可以準(zhǔn)確測(cè)得定位目標(biāo)的運(yùn)動(dòng)參數(shù),但其定位誤差會(huì)隨時(shí)間增長(zhǎng)[5-6]。當(dāng)下MEMS慣性傳感器朝著低成本、低功耗、高精度的方向發(fā)展,在室內(nèi)定位領(lǐng)域?qū)?huì)有更大的應(yīng)用空間。
UWB與MEMS定位在全球范圍內(nèi)受到了廣泛關(guān)注與深入研究。劉見輝等提出了慣性導(dǎo)航系統(tǒng)(Inertial Navigation System,INS)和掃描儀相結(jié)合的測(cè)量系統(tǒng),同時(shí)在該量測(cè)系統(tǒng)中又加入了UWB以解決INS誤差積累的問題[7]。鄔春明等結(jié)合差分全球定位系統(tǒng)(Differential Global Positioning System,DGPS)和UWB,利用Kalman濾波器消除UWB非視距誤差,采用粒子濾波器進(jìn)行數(shù)據(jù)融合,可將整體定位精度提高19%[8]。王芳等采用UWB與里程計(jì)信息融合的定位技術(shù),提高了里程計(jì)航位推算穩(wěn)定性與精度[9]。Qigao Fan等通過建立INS/UWB融合濾波的誤差模型,提出了模糊適應(yīng)卡爾曼濾波(Fuzzy Adaptive Kalman Filter,F(xiàn)AKF),根據(jù)模糊控制理論對(duì)量測(cè)噪聲進(jìn)行調(diào)整[10]。Ascher C等將UWB和INS進(jìn)行緊組合,利用INS得到用戶的軌跡和航向信息,結(jié)合UWB精確的定位數(shù)據(jù),可完成室內(nèi)環(huán)境下的實(shí)時(shí)定位[11]。
本文旨在將UWB和MEMS兩種技術(shù)相結(jié)合,采用合適的算法對(duì)兩系統(tǒng)進(jìn)行信息與數(shù)據(jù)融合,充分發(fā)揮兩者在室內(nèi)定位中的優(yōu)勢(shì),解決UWB系統(tǒng)由于外在因素?zé)o法完成有效定位、MEMS長(zhǎng)期定位精度差等問題。本文所構(gòu)建的混合定位系統(tǒng),在復(fù)雜室內(nèi)環(huán)境下定位的連續(xù)性、穩(wěn)定性和可靠性得到大大增強(qiáng)[12]。此外,成本較高的UWB定位設(shè)備也會(huì)因低成本MEMS的加入使得成本有所下降,在保證定位精度的前提下,UWB定位基站的布設(shè)成本也會(huì)有所降低。
1 基礎(chǔ)定位系統(tǒng)
1.1 UWB定位系統(tǒng)
UWB定位技術(shù)源于超寬帶無載波通信技術(shù),其利用納秒至微秒級(jí)的非正弦波窄脈沖進(jìn)行通信,工作頻段為3.1~10.6GHz,可直接脈沖調(diào)制,不受載波干擾[13]。UWB定位在本質(zhì)上與GPS衛(wèi)星定位原理一致,即自己搭建基站,利用發(fā)射的UWB脈沖信號(hào)進(jìn)行測(cè)距或者定向,然后根據(jù)和GPS定位類似的算法,計(jì)算出每個(gè)基站到移動(dòng)站(定位標(biāo)簽)的距離,從而解算出移動(dòng)站的空間坐標(biāo)。UWB定位簡(jiǎn)易示意圖如圖1所示。
系統(tǒng)主要由定位基站(也稱接收機(jī))、定位標(biāo)簽和中心處理器組成[13]。
按照測(cè)量參數(shù)不同,將UWB定位方法分為基于接收信號(hào)強(qiáng)度法(Received Signal Strength Indication, RSSI)和基于到達(dá)角度法(Angle of Arrival, AOA)、基于到達(dá)時(shí)間法(Time of Arrival, TOA)和基于到達(dá)時(shí)間差法(Time Difference of Arrival, TDOA)等[14-16]。本文采用AOA/TDOA算法,充分利用距離或角度信息,其原理如圖2所示。
傳感器能得到定位目標(biāo)的到達(dá)時(shí)間差Δt和到達(dá)角度α1和α2,設(shè)移動(dòng)站MS(x0,y0)、基準(zhǔn)站BS1(x1,y1)和BS2(x2,y2),則
(1)
其中,c代表光速。聯(lián)立式(1)兩式即可求得MS的二維坐標(biāo)。對(duì)于三維情況,TDOA公式與二維類似,如式(2)所示。
(2)
AOA包括方向角λ和仰角φ,如式(3)所示。
(3)
本文所使用的AOA/TDOA算法,避免了TOA方法嚴(yán)格時(shí)鐘同步問題,采用了天線陣列,雖然設(shè)備相對(duì)比較復(fù)雜,但是精度得到了保證。每個(gè)傳感器探測(cè)一個(gè)標(biāo)簽的二維到達(dá)角度(AOA,方向角和仰角),同時(shí)記錄下感應(yīng)的TDOA,從傳感器得來的數(shù)據(jù)可通過相應(yīng)的算法綜合起來使用,從而得到定位結(jié)果。
1.2 MEMS慣性定位系統(tǒng)
首先介紹本文坐標(biāo)系的定義及坐標(biāo)系間的轉(zhuǎn)換關(guān)系。載體坐標(biāo)系(b系)是指在定位過程中載體位置處的坐標(biāo)系,本文所指b系原點(diǎn)在載(車)體重心,x軸沿載(車)體橫軸向前,y軸沿載(車)體向左,z軸沿載(車)體豎直向上,如圖3所示。

(4)
MEMS慣性定位算法由初始對(duì)準(zhǔn)和定位解算兩部分組成,前者為后者提供初始姿態(tài)信息[17]。對(duì)慣性系統(tǒng)而言,其MEMS陀螺精度太低以至無法感測(cè)地球自轉(zhuǎn)角速度(約15(°)/h),因而低精度MEMS捷聯(lián)慣導(dǎo)系統(tǒng)初始自對(duì)準(zhǔn)無法完成方位對(duì)準(zhǔn),只能根據(jù)加速度計(jì)輸出解算出載體俯仰角和橫滾角[17],即水平對(duì)準(zhǔn)。方位對(duì)準(zhǔn)則需要利用其他外部信息給出。
(1)水平初始對(duì)準(zhǔn)
靜基座條件下,重力加速度只在地垂線方向上有輸出(輸出為g),有:
(5)
(6)
(2)方位初始對(duì)準(zhǔn)
對(duì)于初始航向角,若以地理坐標(biāo)系為導(dǎo)航坐標(biāo)系,則初始航向角是指與真北的夾角,此角度需要磁力計(jì)或磁羅盤等提供;若以地面正交坐標(biāo)系為導(dǎo)航坐標(biāo)系,則直接裝訂初始方位角為0°,最終解算出來的坐標(biāo)即為該坐標(biāo)系下的結(jié)果。對(duì)于初始航向問題,本文采用直接裝訂的方式,將初始時(shí)刻計(jì)算得到的磁航向作為系統(tǒng)初始航向裝訂。
(3)定位解算和反饋校正
圖4所示為慣導(dǎo)解算過程的詳細(xì)框圖,主要顯示了根據(jù)陀螺儀和加速度計(jì)輸出計(jì)算車輛最終姿態(tài)、速度和位置的過程。
相關(guān)算法和公式如下所述[19]:
設(shè)計(jì)15維Kalman濾波器,其狀態(tài)向量對(duì)應(yīng)為:
(7)
KF估計(jì)出來的這些誤差量將被反饋到三軸陀螺儀、三軸加速度計(jì)、常規(guī)慣導(dǎo)解算的姿態(tài)、速度和位置,通過修正得到更為精確的定位結(jié)果。


(8)
根據(jù)補(bǔ)償后的陀螺輸出對(duì)姿態(tài)矩陣進(jìn)行更新:
(9)
(10)
由于MEMS器件采樣頻率較高,故可認(rèn)為在極短的時(shí)間內(nèi)受到一個(gè)恒力,載體做勻變速直線運(yùn)動(dòng)。用梯形算法計(jì)算速度和位置,公式如下:
(11)
前2個(gè)部分得到的姿態(tài)、速度、位置信息是慣導(dǎo)解算直接得到的信息,誤差會(huì)隨時(shí)間的增加而累積,故需利用KF估計(jì)量對(duì)其進(jìn)行進(jìn)一步修正:
(12)
通過KF得到的3個(gè)的姿態(tài)角誤差(小角度)對(duì)姿態(tài)矩陣進(jìn)行修正:
(13)
(14)
(15)

(16)
其中,arctan2(a,b)為反正切函數(shù),值域?yàn)?-π,π),與橫滾角、航向角定義范圍一致。
2 Kalman濾波器設(shè)計(jì)
2.1 動(dòng)態(tài)零速修正
假設(shè)小車在勻速、剎車、加速、轉(zhuǎn)彎等不同運(yùn)動(dòng)狀態(tài)過程中,不發(fā)生側(cè)滑與跳躍,則可以認(rèn)為車輛的天向與側(cè)向速度在車體運(yùn)動(dòng)中始終保持為零,即存在動(dòng)態(tài)零速:
(17)
可以利用車輛的天向速度與側(cè)向速度為零的速度信息,輔以里程計(jì)輸出的軸向速度信息與慣導(dǎo)解算得到的速度信息作差,估算捷聯(lián)解算的誤差信息,進(jìn)行反饋修正,從而提高定位精度。
以15維狀態(tài)向量為例,狀態(tài)量取慣導(dǎo)系統(tǒng)的3個(gè)姿態(tài)誤差角、3個(gè)速度誤差、3個(gè)位置誤差,三軸陀螺常值漂移、三軸加計(jì)常值偏置,如下所示:
(18)
(19)
定位算法簡(jiǎn)化后的誤差模型:
(20)
根據(jù)定位算法的誤差模型和Kalman狀態(tài)量的選擇,可以得到狀態(tài)轉(zhuǎn)移矩陣為:
(21)
(22)
根據(jù)量測(cè)向量的選取,可得到對(duì)應(yīng)的量測(cè)矩陣:
(23)
通過狀態(tài)量的估計(jì),完成Kalman濾波的估計(jì)與補(bǔ)償,可以得到最終的定位結(jié)果。
2.2 MEMS/UWB融合濾波器設(shè)計(jì)
根據(jù)實(shí)際UWB系統(tǒng)的輸出信息以及所采用的MEMS定位算法,本文最終采用KF松組合方式實(shí)現(xiàn)兩系統(tǒng)的融合定位[7,20-22]。單獨(dú)的車載MEMS定位系統(tǒng),是采用帶動(dòng)態(tài)零速修正的慣導(dǎo)解算算法,利用實(shí)際解算速度和里程計(jì)速度動(dòng)態(tài)零速構(gòu)造量測(cè)信息對(duì)慣導(dǎo)誤差進(jìn)行修正,此過程通過KF實(shí)現(xiàn)。
對(duì)于捷聯(lián)慣導(dǎo)而言,以速度誤差為觀測(cè)量進(jìn)行狀態(tài)估計(jì)與反饋,進(jìn)而抑制慣導(dǎo)誤差積累,此過程不依賴于外界其他硬件設(shè)施。對(duì)于MEMS/UWB融合而言,在MEMS基礎(chǔ)上加入了UWB位置信息,需要構(gòu)造位置誤差觀測(cè)量再進(jìn)行KF。考慮到2個(gè)系統(tǒng)的獨(dú)立性,組合結(jié)構(gòu)圖如圖5所示。
在上述2個(gè)KF當(dāng)中,考慮到其狀態(tài)量相同,只是量測(cè)信息有所不同,因此時(shí)間更新相似,可根據(jù)條件判斷選擇對(duì)應(yīng)的量測(cè)更新。因此,2個(gè)KF估計(jì)器是可以合并的。對(duì)圖5進(jìn)行合并,可得到MEMS和UWB的松組合方式的結(jié)構(gòu)框架如圖6所示。
由UWB提供位置信息P以及里程計(jì)信息與動(dòng)態(tài)零速信息,形成六維量測(cè)向量:
(24)
其中:Δpk=pINS-pUWB,Δvk由式(19)可得,則其對(duì)應(yīng)的量測(cè)矩陣為:
(25)
3 試驗(yàn)與分析
本文中在7.5m×7.5m×3m的實(shí)驗(yàn)室里布設(shè)4個(gè)UWB定位傳感器,大致布局如圖7所示。
UWB標(biāo)簽固定在小車頂部,MEMS慣性傳感器固定在小車中心。UWB標(biāo)簽示意如圖8所示。 MEMS器件選用ADI公司的ADIS6448十軸慣性器件,其外形如圖9所示,參數(shù)如表1所示。
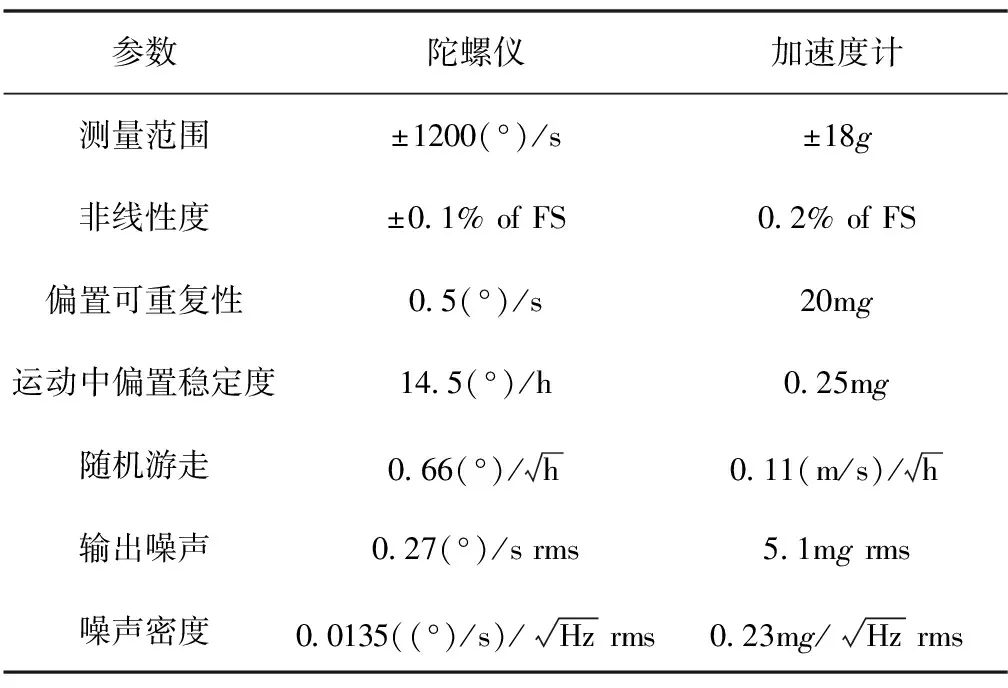
表1 ADIS16448主要參數(shù)(A+G)
本文試驗(yàn)的路線設(shè)計(jì)為U型運(yùn)動(dòng)路線,便于分區(qū)間進(jìn)行誤差計(jì)算和定位精度分析。往返一次試驗(yàn)路徑為A-B-C-D-C-B-A,軌跡示意如圖10所示。
重復(fù)10次U型往返路徑作為融合試驗(yàn)路徑。整個(gè)試驗(yàn)的運(yùn)動(dòng)時(shí)間為348.2860s,運(yùn)動(dòng)距離為253.4369m。
融合過程中,由于MEMS解算周期與UWB位置輸出周期不一致,并且兩者周期存在非整數(shù)倍關(guān)系,所以需要考慮長(zhǎng)時(shí)間解算的時(shí)鐘同步性問題。MEMS輸出頻率為102.4Hz,UWB輸出頻率為9.25Hz,根據(jù)兩者的時(shí)間關(guān)系,每20s進(jìn)行一次數(shù)據(jù)調(diào)整。一次調(diào)整時(shí)間偏差從0.1270s減小到0.0195s。時(shí)鐘同步性調(diào)整如圖11所示。
MEMS、UWB、MEMS/UWB三者定位效果如圖12~圖14所示。
由圖12可以看出,MEMS定位結(jié)果平滑,但隨著時(shí)間的積累,由于航向誤差的存在與不斷積累,解算路徑慢慢偏離實(shí)際運(yùn)動(dòng)路徑,誤差逐漸增加。
由圖13可以看出,UWB屬于絕對(duì)定位,其誤差在一個(gè)合理的范圍內(nèi),整體運(yùn)動(dòng)軌跡在實(shí)際運(yùn)動(dòng)軌跡的兩側(cè)跳動(dòng)分布。由圖14可以看出,MEMS/UWB融合定位因?yàn)橛辛薝WB位置信息的加入,對(duì)MEMS的積累誤差有著明顯的抑制作用,可以得到近似于UWB定位的效果。對(duì)于UWB而言,該融合算法在UWB定位系統(tǒng)出現(xiàn)定位失效的情況下,仍能保持比較好的定位效果。表2所示為三種定位方式的終點(diǎn)坐標(biāo)以及誤差情況。

表2 融合定位試驗(yàn)的終點(diǎn)坐標(biāo)及誤差對(duì)比結(jié)果
由表2可以看出,融合定位對(duì)MEMS定位的積累誤差有著顯著的修正和抑制作用,將相對(duì)誤差從0.2401%降到0.0265%。而UWB自身定位精度較高,融合對(duì)UWB定位精度無顯著提升作用,但對(duì)UWB定位易受遮擋的缺陷有著很好的彌補(bǔ)作用。整體而言,MEMS/UWB融合定位可適當(dāng)彌補(bǔ)兩者的缺陷,擁有比單獨(dú)MEMS子系統(tǒng)更好的定位效果。
4 結(jié)論
本文以室內(nèi)定位為背景,針對(duì)UWB定位存在易受環(huán)境影響與遮擋的問題和MEMS定位中誤差隨時(shí)間積累的問題,文中完成了以下工作:
1)設(shè)計(jì)了以里程計(jì)速度信息和動(dòng)態(tài)零速作為觀測(cè)量的MEMS慣導(dǎo)解算算法,通過卡爾曼濾波器抑制慣導(dǎo)的誤差積累,實(shí)現(xiàn)了短期誤差在1%以內(nèi)的定位效果。
2)通過分析UWB和MEMS這2個(gè)定位子系統(tǒng),在MEMS定位算法的基礎(chǔ)上,完善量測(cè)方程,建立速度、位置六維量測(cè)方程,完成MEMS/UWB融合算法的設(shè)計(jì),實(shí)現(xiàn)兩者的融合定位。
3)針對(duì)融合過程中MEMS與UWB時(shí)鐘不同步的問題,提出了定時(shí)調(diào)整方法,減小時(shí)鐘不同步帶來的誤差。
本文提出的MEMS/UWB組合的室內(nèi)定位方法實(shí)現(xiàn)了兩者的優(yōu)勢(shì)互補(bǔ),解決了MEMS定位長(zhǎng)期發(fā)散問題與UWB定位短期失效問題。MEMS/UWB融合定位擁有比單獨(dú)子系統(tǒng)定位更好的定位精度與魯棒性。
猜你喜歡
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
中華手工(2017年2期)2017-06-06 23:00:31
中外會(huì)展(2014年4期)2014-11-27 07:46:46
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32