基于降維負(fù)載轉(zhuǎn)矩觀測器的調(diào)速系統(tǒng)控制技術(shù)研究
2018-11-21 03:34:58鄒志勤霍希建
導(dǎo)航定位與授時 2018年6期
洋 婷,黃 建,王 貫,鄒志勤,霍希建
(北京自動化控制設(shè)備研究所,北京 100074)
0 引言
未來飛行器要求具有空間結(jié)構(gòu)緊湊、飛行速度快、作戰(zhàn)半徑大、突防能力強(qiáng)、攻擊精度高、作戰(zhàn)效能大的特點,電動燃油調(diào)速系統(tǒng)作為飛行器發(fā)動機(jī)的關(guān)鍵設(shè)備,其性能直接決定飛行器系統(tǒng)的動態(tài)品質(zhì)與可靠性[1]。隨著多電和全電燃?xì)鉁u輪發(fā)動機(jī)的快速發(fā)展,出現(xiàn)了使用電動機(jī)提供動力的電動齒輪燃油泵[2]。通過直接控制電機(jī)控制器得到可以調(diào)節(jié)的電機(jī)轉(zhuǎn)速,再通過電機(jī)帶動齒輪泵同步旋轉(zhuǎn)為發(fā)動機(jī)泵油,從而使得發(fā)動機(jī)需油規(guī)律與燃油泵供油規(guī)律相匹配,極大地提高了電動燃油泵的系統(tǒng)效率。高性能飛行器的發(fā)動機(jī)對燃油流量變化有嚴(yán)格的要求,這就要求在負(fù)載變化的情況下,高速段電機(jī)的轉(zhuǎn)速跳變不能超過1.5%,負(fù)載擾動不僅對永磁同步電機(jī)穩(wěn)速精度有影響,而且影響著整個控制系統(tǒng)的動態(tài)性能和穩(wěn)定性等關(guān)鍵指標(biāo)[3-4],傳統(tǒng)的比例積分導(dǎo)數(shù)(Proportion-Integral-Derivate, PID)控制算法已經(jīng)不能滿足當(dāng)前飛行器性能要求。
針對抗負(fù)載擾動的問題,文獻(xiàn)[5]提出了引入負(fù)載轉(zhuǎn)矩的前饋補(bǔ)償,轉(zhuǎn)換成兩自由度控制系統(tǒng),但是直接測量負(fù)載轉(zhuǎn)矩,會增加系統(tǒng)成本,并且儀器精度和響應(yīng)速度都會影響負(fù)載轉(zhuǎn)矩的測量。受飛行器空間結(jié)構(gòu)的限制,采用非接觸式的狀態(tài)觀測器對負(fù)載轉(zhuǎn)矩進(jìn)行觀測是一個很好的選擇。目前負(fù)載轉(zhuǎn)矩的觀測主要有模型參考自適應(yīng)法、滑模觀測器法、卡爾曼濾波器法等[6-8],在處理器系統(tǒng)小型集成化條件下,運算量與控制效果沒有實現(xiàn)最優(yōu)化,尤其是多同步電機(jī)集成控制系統(tǒng)。本文結(jié)合矢量控制方法,研究了前饋補(bǔ)償?shù)目刂撇呗裕岢隽艘环N基于降維負(fù)載轉(zhuǎn)矩觀測器的抗負(fù)載擾動控制方法。通過仿真和試驗結(jié)果表明,在快速加載與卸載實驗條件下所提出的方法的正確性與可行性。
1 永磁同步電機(jī)數(shù)學(xué)模型
高精度電動泵調(diào)速系統(tǒng)一般采用永磁同步電機(jī),永磁同步電機(jī)具有轉(zhuǎn)矩脈動小、調(diào)速精度高等特點。
1.1 永磁同步電機(jī)簡化數(shù)學(xué)模型
由于電機(jī)在轉(zhuǎn)動的過程中,定子繞組和轉(zhuǎn)子磁極之間會產(chǎn)生相互影響,電磁關(guān)系十分復(fù)雜,所以很難直接建立永磁同步電機(jī)的精確數(shù)學(xué)模型。為方便數(shù)學(xué)模型的推導(dǎo),便需要忽略掉一些影響小的次要因素,在電機(jī)建模時進(jìn)行了理想化近似[9]:
1)忽略三相電流產(chǎn)生高次諧波對磁勢的影響;
2)忽略磁滯效應(yīng)造成的損耗,忽略渦流和鐵芯的飽和情況;
3)忽略外界環(huán)境(如溫度等)對電機(jī)參數(shù)(繞組電阻和電感)的影響,即電機(jī)參數(shù)固定不變;
4)忽略定子繞組和永磁體的阻尼作用。
1.2 坐標(biāo)變換及d-q軸系下永磁同步電機(jī)數(shù)學(xué)模型
在A-B-C三相坐標(biāo)系下,可由電壓、磁鏈、轉(zhuǎn)矩方程式共同構(gòu)成永磁同步電動機(jī)數(shù)學(xué)模型。但要對電機(jī)控制機(jī)理進(jìn)行分析,就必須對電機(jī)模型進(jìn)行解耦。運用矢量變換原理,將A-B-C坐標(biāo)下的數(shù)學(xué)模型先經(jīng)過CLARK變換到α-β坐標(biāo)系,再通過PARK變換到d-q坐標(biāo)系。從而將三相靜止坐標(biāo)系下的iA、iB、iC三相電流,分解成為兩相旋轉(zhuǎn)坐標(biāo)系下電流的轉(zhuǎn)矩和勵磁分量,解耦過程如圖1所示。
在保證電機(jī)輸出功率恒定的條件下,實現(xiàn)了電機(jī)數(shù)學(xué)模型的解耦簡化,并且定子和轉(zhuǎn)子磁動勢相對恒定[10]。利用坐標(biāo)變換原理,對電機(jī)的數(shù)學(xué)模型進(jìn)行簡化,電機(jī)數(shù)學(xué)模型經(jīng)過CLARK和PARK兩次坐標(biāo)變換,轉(zhuǎn)換到d-q坐標(biāo)下,經(jīng)過坐標(biāo)變換后,在旋轉(zhuǎn)兩相坐標(biāo)系下的數(shù)學(xué)模型為:
(1)
式中,Ud和Uq為定子電壓分量;Rs為繞組的阻值;p為微分算子;ω為旋轉(zhuǎn)角速度;ψq和ψd為交直軸磁鏈,為
(2)
式中,Ld和Lq為電樞電感;id和iq為定子電流分量;ψf代表轉(zhuǎn)子磁鏈。
Te=np(ψdiq-ψqid)
(3)
式中,np代表電機(jī)極對數(shù)。
結(jié)合式(3)可得:
Te=np[ψfiq+(Ld-Lq)idiq]
(4)
對于旋轉(zhuǎn)坐標(biāo)系下的電機(jī)數(shù)學(xué)模型,由式(4)可以看出,電機(jī)轉(zhuǎn)矩分為兩部分,一部分為定子電流的轉(zhuǎn)矩分量和磁鏈相互作用產(chǎn)生,另一部分為定子電流的勵磁分量和轉(zhuǎn)矩分量共同作用產(chǎn)生,兩部分都和iq成正比,因此轉(zhuǎn)矩大小和定子電流的轉(zhuǎn)矩分量也為正比關(guān)系。同時,勵磁分量id可以控制定子磁鏈,因此可利用它來削弱轉(zhuǎn)子磁場。
此處選擇id=0的控制方式,于是轉(zhuǎn)矩方程可以簡化為以下形式,轉(zhuǎn)矩的變化只與q軸電流有關(guān),這可以在轉(zhuǎn)矩方程中實現(xiàn)id與iq的解耦,簡化了控制算法。
Te=npψfiq
(5)
2 降階狀態(tài)觀測器原理及設(shè)計
2.1 降階狀態(tài)觀測器分析
考慮到系統(tǒng)的輸出中已經(jīng)包含有系統(tǒng)狀態(tài)的部分信息,因此直接利用這部分信息可以構(gòu)造出維數(shù)低于被估計系統(tǒng)的狀態(tài)觀測器[11]。設(shè)被估系統(tǒng)為n維線性定常系統(tǒng),狀態(tài)方程如下:
(6)
其中,A、B和C分別為n×n、n×r和m×n階實矩陣,且假設(shè)(A,C)能觀測,C為滿秩矩陣。
任取(n-m)×n階常陣R,使得n×n階矩陣Q非奇異。
(7)
則有
(8)
(9)
由式(9)可導(dǎo)出
(10)
定義:
則可寫為:
(11)

由此可推出降階狀態(tài)觀測器的狀態(tài)方程式為:
(12)
2.2 永磁同步電機(jī)轉(zhuǎn)矩觀測器設(shè)計
考慮到控制算法的采樣速率足夠高,在采樣周期內(nèi)可以認(rèn)為負(fù)載轉(zhuǎn)矩為恒定值,即dTl/dt=0。再根據(jù)永磁同步電機(jī)轉(zhuǎn)矩方程式(13)及被控對象狀態(tài)方程式(12),可推導(dǎo)永磁同步電機(jī)負(fù)載轉(zhuǎn)矩觀測器的狀態(tài)方程如式(14):

(13)
(14)
于是上式可寫為:
(15)
則永磁同步電機(jī)降階負(fù)載轉(zhuǎn)矩觀測器的特征方程為:
(16)

假設(shè)期望出現(xiàn)的極點為α、β,那么目標(biāo)特征方程為:
s2-(α+β)s+αβ=0
(17)
則由式(16)與式(17)可得
(18)
摩擦系數(shù)B忽略不計,則由式(15)可得:
(19)
由式(19)可構(gòu)建出負(fù)載轉(zhuǎn)矩觀測器的框圖,如圖3所示,其中Kt為永磁同步電機(jī)的電磁轉(zhuǎn)矩系數(shù)。以系統(tǒng)轉(zhuǎn)速與q軸電流作為觀測器的輸入,經(jīng)
過解算便能觀測出轉(zhuǎn)速與負(fù)載轉(zhuǎn)矩,降階的負(fù)載轉(zhuǎn)矩觀測器結(jié)構(gòu)比較簡單,編程易實現(xiàn),具有一定的抗干擾性。
3 仿真分析
為驗證降階負(fù)載轉(zhuǎn)矩觀測器的有效性,本研究將負(fù)載轉(zhuǎn)矩觀測器與永磁同步電機(jī)矢量控制相結(jié)合,將負(fù)載轉(zhuǎn)矩觀測器的輸出前饋到q軸電流的輸入作為補(bǔ)償,分析該方法的有效性。帶負(fù)載轉(zhuǎn)矩前饋補(bǔ)償?shù)挠来磐诫姍C(jī)系統(tǒng)控制框圖如圖4所示,電機(jī)的相關(guān)參數(shù)如表1所示。
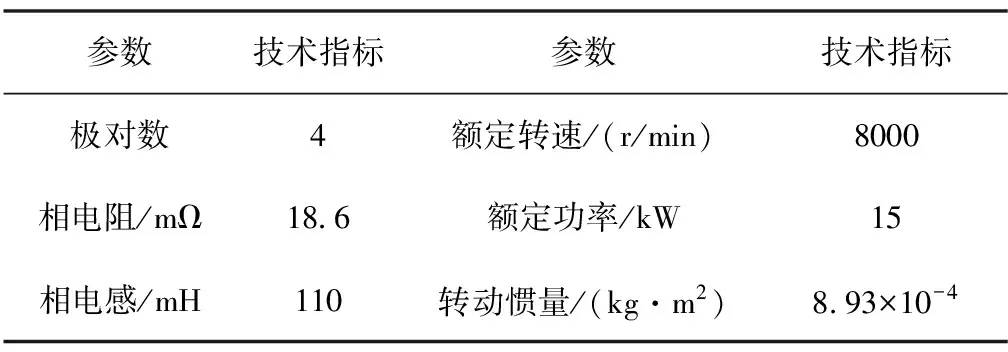
表1 電機(jī)仿真參數(shù)
仿真參數(shù)為:速度環(huán)Kp=0.45,速度環(huán)Ki=0.001,電流環(huán)Kp=0.3,電流環(huán)Ki=0.015;轉(zhuǎn)矩觀測器系數(shù)K1=-200000,K2=500000,反饋系數(shù)=0.022。首先進(jìn)行電機(jī)啟動性能仿真,結(jié)果如圖5所示。由圖5可知,未加負(fù)載轉(zhuǎn)矩觀測器時,給定8000r/min階躍指令轉(zhuǎn)速超調(diào)量為277r/min,加負(fù)載轉(zhuǎn)矩觀測器時轉(zhuǎn)速超調(diào)量為0r/min,由此可知,負(fù)載轉(zhuǎn)矩觀測器能夠有效抑制轉(zhuǎn)速超調(diào)。
當(dāng)負(fù)載突變時,對轉(zhuǎn)速響應(yīng)進(jìn)行仿真分析,轉(zhuǎn)速指令給定為8000r/min,在0.25s突增10N·m轉(zhuǎn)矩,在0.3s突卸10N·m轉(zhuǎn)矩,加轉(zhuǎn)矩觀測器與未加轉(zhuǎn)矩觀測器對應(yīng)的轉(zhuǎn)速響應(yīng)如圖6所示,負(fù)載突變時刻觀測的負(fù)載轉(zhuǎn)矩波形如圖7所示。
由圖6可知,未加入負(fù)載轉(zhuǎn)矩前饋補(bǔ)償時,在0.25s突加10N·m負(fù)載時,電機(jī)轉(zhuǎn)速由8000r/min下降到7876r/min,轉(zhuǎn)速波動為124r/min;在0.3s突卸10N·m負(fù)載時,轉(zhuǎn)速由8000r/min上升到8131r/min,轉(zhuǎn)速波動為131r/min;加入負(fù)載轉(zhuǎn)矩前饋補(bǔ)償后,在0.25s突加10N·m負(fù)載時,電機(jī)轉(zhuǎn)速由8000r/min下降到7972r/min,轉(zhuǎn)速波動為28r/min;在0.3s突卸10N·m負(fù)載時,轉(zhuǎn)速由8000r/min上升到8037r/min,轉(zhuǎn)速波動為37r/min;對比加入負(fù)載轉(zhuǎn)矩前饋補(bǔ)償前后曲線,繪制對比表格如表2所示。

表2 加入轉(zhuǎn)矩前饋補(bǔ)償前后仿真轉(zhuǎn)速波動對比
4 實驗驗證
為了驗證負(fù)載轉(zhuǎn)矩觀測器的與前饋補(bǔ)償方案的可行性,基于DSP+FPGA微處理系統(tǒng),搭建某同步電機(jī)驅(qū)動控制試驗平臺,時針主頻300MHz,PWM開關(guān)周期16kHz,硬件如圖8所示。
分別采用傳統(tǒng)PI控制方式與帶觀測轉(zhuǎn)矩前饋補(bǔ)償?shù)腜I控制方式進(jìn)行負(fù)載轉(zhuǎn)矩突變實驗,轉(zhuǎn)速波動圖如圖9所示,負(fù)載轉(zhuǎn)矩變化圖如圖10所示。
由圖9與圖10對比可知,在圖9中t=3010s時由于負(fù)載突升引起轉(zhuǎn)速下降,無觀測轉(zhuǎn)矩前饋補(bǔ)償?shù)那€轉(zhuǎn)速波動較大;圖中t=3043s時由于負(fù)載突卸引起轉(zhuǎn)速上升,同樣的,無觀測轉(zhuǎn)矩前饋補(bǔ)償?shù)那€轉(zhuǎn)速波動較大。
由圖11可知,當(dāng)電機(jī)轉(zhuǎn)速穩(wěn)定在8000r/min時,突加10N·m負(fù)載(14s手動加載),在突加轉(zhuǎn)矩過程中,無負(fù)載轉(zhuǎn)矩觀測的傳統(tǒng)PI控制方式轉(zhuǎn)速波動大約為-120r/min,有負(fù)載轉(zhuǎn)矩觀測并前饋補(bǔ)償?shù)腜I控制方式轉(zhuǎn)速波動大約為-80r/min;由圖12可知,當(dāng)電機(jī)轉(zhuǎn)速穩(wěn)定在8000r/min并且負(fù)載轉(zhuǎn)矩穩(wěn)定在10N·m時突卸負(fù)載(3s手動卸載),無負(fù)載轉(zhuǎn)矩觀測的傳統(tǒng)PI控制方式轉(zhuǎn)速波動大約為+440r/min,有負(fù)載轉(zhuǎn)矩觀測并前饋補(bǔ)償?shù)腜I控制方式轉(zhuǎn)速波動大約為+104r/min。
為實現(xiàn)基于降維負(fù)載轉(zhuǎn)矩觀測器的實時性與有效性,在同樣的條件下,利用其他算法[12]進(jìn)行比較,試驗結(jié)果如表3所示。
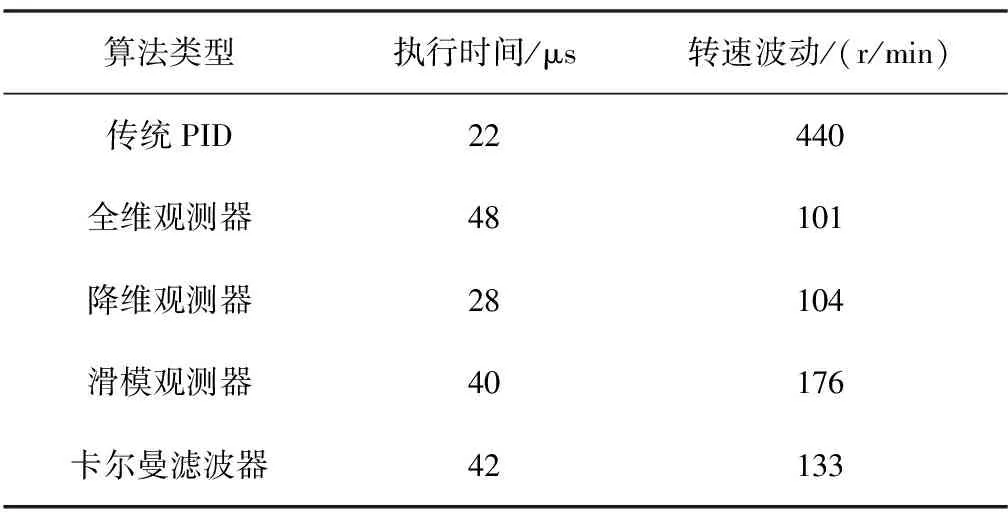
表3 不同算法下性能比較
由表3可以很明顯地看出,基于降維負(fù)載轉(zhuǎn)矩觀測器和基于全維觀測器的調(diào)速系統(tǒng)抗負(fù)載擾動能力強(qiáng),但降維觀測器法運算量小,既能滿足性能要求,又能滿足實時性要求。因此,要實現(xiàn)在硬件資源有限的條件下多同步電機(jī)驅(qū)動,降維觀測器法比全維觀測器法更具有優(yōu)越性。
5 結(jié)論
本文根據(jù)降階狀態(tài)觀測器原理,結(jié)合永磁同步電機(jī)數(shù)學(xué)模型,推導(dǎo)出了永磁同步電機(jī)負(fù)載轉(zhuǎn)矩觀測器模型,對高精度永磁同步電機(jī)調(diào)速系統(tǒng)抗擾性能進(jìn)行了深入研究,得到以下2個結(jié)論:
1)針對高精度電動燃油調(diào)速系統(tǒng)在負(fù)載突變工作時燃油增壓與燃油流量調(diào)節(jié)的穩(wěn)定性問題,研究了負(fù)載突變情況下前饋補(bǔ)償?shù)目刂撇呗裕岢隽艘环N基于降維負(fù)載轉(zhuǎn)矩觀測器的抗負(fù)載擾動控制方法,對比可知本文的抗負(fù)載擾動控制方法具有較強(qiáng)的實時性。
2)通過仿真和試驗結(jié)果表明,在快速加載與卸載實驗條件下驗證了本文所提出的基于降維負(fù)載轉(zhuǎn)矩觀測器的抗負(fù)載擾動方法的正確性與可行性。