不同截止高度角下BDS/GPS/GALILEO多模組合SPP 解算性能分析
2018-11-20 08:40:30余曉娜王超左小清布金偉常軍
全球定位系統(tǒng) 2018年5期
關鍵詞:系統(tǒng)
余曉娜,王超,左小清,布金偉,常軍
(1.昆明理工大學 國土資源工程學院,云南 昆明 650093;2.中國人民大學 信息學院,北京 100872;3.國家測繪地理信息局第一大地測量隊,陜西 西安 710054)
0 引 言
近幾年來,隨著導航衛(wèi)星事業(yè)的高速發(fā)展,許多國家和地區(qū)紛紛建立自己的衛(wèi)星導航系統(tǒng)[1].目前世界上應用最多的定位導航系統(tǒng)分別是:美國的GPS、歐盟的GALILEO、中國的北斗(BDS)以及俄羅斯的GLONASS.美國的GPS系統(tǒng)經(jīng)過20多年的研究和實驗,于1994年完成24顆衛(wèi)星在軌的完整系統(tǒng)框架,實現(xiàn)全球98%的覆蓋[2].2000年,中國首次建成北斗導航實驗系統(tǒng),北斗衛(wèi)星導航系統(tǒng)(BDS)計劃由35顆衛(wèi)星組成[3-4],其中有5顆靜止軌道衛(wèi)星、27顆中地球軌道衛(wèi)星以及3顆傾斜同步軌道衛(wèi)星.北斗除了在軍事方面的應用之外,民用方面也發(fā)展迅速,目前基本實現(xiàn)了對東南亞的全覆蓋.歐盟的GALILEO衛(wèi)星導航系統(tǒng)計劃于1999年首次公布,由30顆衛(wèi)星組成,除進行導航、定位、授時服務外,還可以進行搜索與救援.
然而,由于單系統(tǒng)的星座規(guī)模有限,提供的定位服務精度低,準確性、可靠性低,安全性有時得不到保障,甚至有時不具實用價值[5].多星座組合導航定位原理與單系統(tǒng)基本相同[6],文獻[7-8]對GPS、BDS及其組合系統(tǒng)進行偽距單點定位的研究,表明組合系統(tǒng)的空間分布、定位精度都優(yōu)于單系統(tǒng).在觀測條件比較惡劣和截止高度角比較高的條件下,三系統(tǒng)組合仍然可以提供定位服務[3-4].
基于一些學者對組合模式的研究,本文開展了不同高度截止角下不同組合模式的偽距單點定位性能分析,主要對BDS(C)、GPS(G)、GPS+BDS(GC)、BDS+GALILEO(CE)、GPS+GALILEO(GC)、GPS+BDS+GALILEO(GCE)六種模式的可見衛(wèi)星數(shù),X、Y、Z方向上的RMS值以及PDOP值進行詳細分析,并比較得出最佳定位組合模式.
1 BDS、GPS、GALILEO組合單點定位模型
1.1 時間系統(tǒng)和坐標系統(tǒng)的統(tǒng)一
1.1.1 時間系統(tǒng)
GPS導航系統(tǒng)的時間系統(tǒng)采用GPS時(GPST),GPST屬于原子時系統(tǒng)(AT),其秒長與原子時相同,由于與國際原子時(TAI)具有不同的原點,所以任一瞬間GPST與TAI間有19 s的偏差.GPST的起始時間為1980年1月6日的0時0分0秒的協(xié)調(diào)世界時(UTC)[9].
GPST與TAI的關系式為
GPST=AIT-19s.
(1)
TAI與UTC的關系式為
AIT=UTC+1 s×n.
(2)
式中,n為AIT與UTC間不斷調(diào)整的參數(shù).
則GPST與UTC(USNO)的關系式為
GPST=UTC(USNO)+1 s×n-19 s.
(3)
BDS導航系統(tǒng)的時間基準采用北斗時(BDT),BDT與GPST一樣也屬于原子時系統(tǒng)(AT),基本單位是s.2006年1月1日的0時0分0秒的協(xié)調(diào)世界時(UTC)為BDT的起算時刻,秒長為原子時秒[10].BDT是通過中國維持的協(xié)調(diào)世界時UTC(NTSC)與國際UTC建立聯(lián)系的,由于閏秒的影響,從1980-01-06—2006-01-01日間共有正閏秒+14 s,所以BDT與GPST間相差14 s的整數(shù)差[10].
BDT與UTC(NTSC)之間的關系為
BDT=UTC(NTSC)+1 s×n-19 s-14s.
(4)
GALILEO采用GST時,GST時間系統(tǒng)與國際原子鐘時間(TAI)同步.
GPST與TAI相差一個常數(shù)13 s.[11]
GST與UTC(NTSC)之間的關系式為[12]
GPST=GST-19 s±30 ns.
(5)
1.1.2 坐標系統(tǒng)
GPS采用的是WGS-84坐標系,BDS坐標系統(tǒng)采用的是CGCS2000大地坐標系,GALILEO采用的坐標系統(tǒng)是基于GTRF的ITRF-96大地坐標系.
WGS-84坐標系和CGCS2000坐標系都屬于空間大地坐標系,它們的參考橢球面的大部分參數(shù)也較為相近,有小部分參數(shù)差異造成的坐標偏差很小,在實際計算過程中認為兩個坐標系解算出來的結(jié)果在實現(xiàn)精度范圍內(nèi)是一致的[13-14].而ITFR-96坐標系與WGS-84坐標系存在的差異為cm級,可以忽略不計,所以在進行非精密測量時三者之間不需要進行坐標轉(zhuǎn)換[15-16].
1.2 BDS+GPS+GALILEO組合單點定位解算模型
單點定位偽距觀測方程可以表示為
(6)

V=AδX-L,
(7)
(f=1,2,…,i+j+k).
式中:i、j、k分別為BDS、GPS、GALILEO的衛(wèi)星個數(shù);cδtG、cδtC、cδtE分別為GPS、BDS、GALILEO的接收機鐘差.
由最小二乘估計計算得[11]:
δX=(ATPA)-1ATPL.
式中:δX為改正數(shù);P為高度角定權(quán).
(8)
2 實驗處理與分析
本文選取MGEX跟蹤站部分測站的2016年2月1日1天的觀測數(shù)據(jù),分別對 BDS(C)、GPS(G)、GPS+BDS(GC)組合、BDS+GALILEO(CE)組合、GPS+GALILEO(GE)組合、GPS+BDS+GALILEO(GCE)組合六種方案,在截止高度角為5°、15°、25°、30°、40°、45°的不同情況下進行偽距單點定位,以對結(jié)果進行分析.
2.1 不同高度角下多模組合衛(wèi)星數(shù)分析
根據(jù)實驗,得到了如圖1和表1所示的結(jié)果.從圖1和表1中可以得出以下結(jié)論:
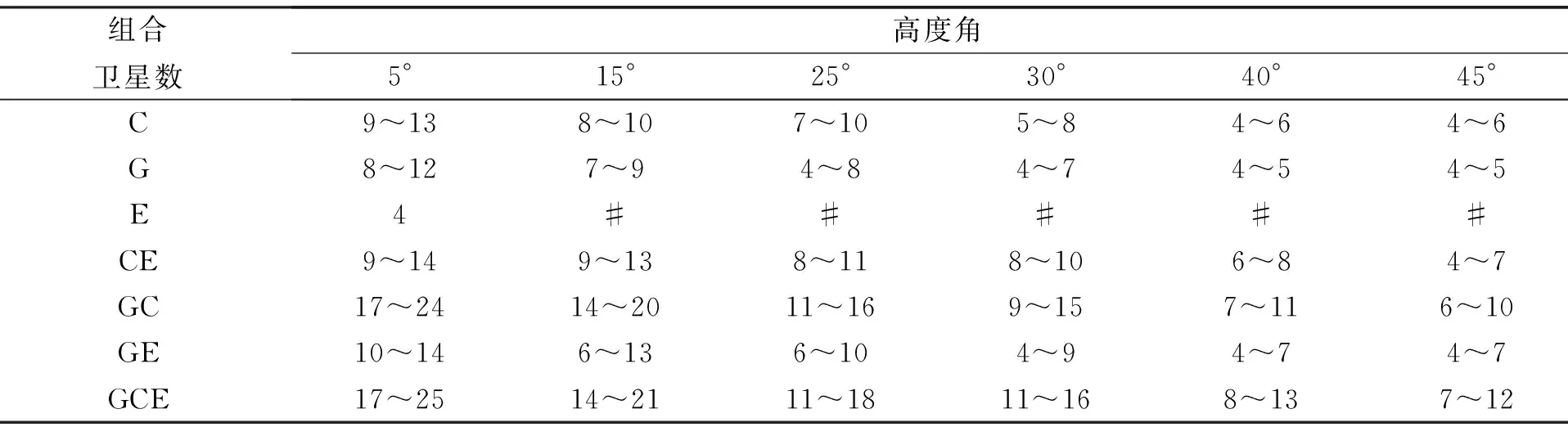
表1 不同截止高度角下不同組合的可見衛(wèi)星數(shù)
當可見衛(wèi)星數(shù)目較多時,衛(wèi)星的空間幾何分布越好.表1示出了不同截止高度角(高度角分別為:5°、15°、25°、30°、40°、45°)下,BDS(C)、GPS(G)、GPS+BDS(GC)、 BDS+GALILEO(CE)、GPS+GALILEO(GE)、GPS+BDS+GALILEO(GCE) 六種模式的可見衛(wèi)星數(shù)目最小值和最大值的統(tǒng)計(#表示無法進行定位).圖 1示出了不同截止高度角下不同組合系統(tǒng)衛(wèi)星可見數(shù)目的情況.
對于單系統(tǒng)組合,在相同的高度截止角下,BDS(C)的衛(wèi)星數(shù)都比GPS(G)的略多,并且穩(wěn)定性也優(yōu)于GPS(G).對于雙系統(tǒng)組合,在相同的高度截止角下,GPS+BDS(GC)雙系統(tǒng)組合的可見衛(wèi)星數(shù)是三種組合中最多的,最多可達24顆; BDS+GALILEO(CE)雙系統(tǒng)組合次之,GPS+GALILEO(GE)雙系統(tǒng)組合的可見衛(wèi)星數(shù)最少.GPS+BDS+GALILEO(GCE)三系統(tǒng)組合的衛(wèi)星數(shù)在六種組合模式中是最多的,穩(wěn)定性也相對來說最高,但是隨著截止高度角的增大,衛(wèi)星數(shù)目逐漸減少.從以上數(shù)據(jù)中我們可以看出,在同一高度截止角下,雖然單系統(tǒng)的衛(wèi)星數(shù)最少,但是仍然滿足衛(wèi)星數(shù)最少為4顆的觀測條件.
2.2 不同高度角下多模組合RMS值及可用度分析
如圖2所示,分別表示了在截止高度角為15°、30°以及40°時的X、Y、Z方向上的RMS值.對于同一組合模式,隨著截止高度角的升高,同一方向上的RMS值也隨之升高;而對于同一組合模式在相同的高度截止角下,可以得到在Z方向上的RMS值是最小的.在六種組合模式中,GPS+BDS+GALILEO(GCE)三系統(tǒng)組合的穩(wěn)定性最高,尤其在截止高度角為15°和30°時,穩(wěn)定性相當,但是在截至高度角為40°時,由于可見衛(wèi)星數(shù)減少,影響了系統(tǒng)的穩(wěn)定性,所以RMS值增大明顯.雖然在X、Y、Z方向上,RMS值都有所增大,但是與其他組合模式相比,是最好的.GPS+GALILEO(GE)組合的X、Y、Z方向的RMS值受截止高度角的影響變化最明顯,尤其從30°到40°時,RMS值呈跳躍式增大.對于BDS(C)和GPS(G)單系統(tǒng)組合,BDS(C)的衛(wèi)星可見數(shù)雖然多于GPS(G),但是系統(tǒng)穩(wěn)定性不如GPS(G).在截止高度角為40°時,由于受到衛(wèi)星數(shù)目的影響,X、Y、Z三個方向的RMS值明顯增大,精度降低.
圖3示出了不同截止高度角下不同模式的歷元可用率.在截止高度角為15°時,BDS(C)、GPS(G)、GPS+BDS(GC)、BDS+GALILEO(CE)、GPS+GALILEO(GE)、GPS+BDS+GALILEO(GCE)六種模式的歷元可用率均為96%.在截止高度角為30°時,GPS的歷元可用率為87.4%,與高度角為15°時相比下降了9.0%;GPS+GALILEO(GC)組合的歷元可用率為90.9%,與高度角為15°時相比,下降了5.3%;而其余組合的可用率與15°時相同,均為96%.在截止高度角為40°時,GPS(G)的歷元可用率為47.8%,與高度角為15°時相比下降了50.2%;GPS+GALILEO(GC)組合的歷元可用率為56%,與高度角為15°時相比下降了41.7%;BDS(C)單系統(tǒng)的歷元可用率為92.2%,與高度角為15°時相比下降了4.0%;其他組合的歷元可用率均為96%.
GPS+BDS+GALILEO(GCE)、GPS+BDS(GC)、BDS+GALILEO(CE)三種組合模式的歷元可用率不受高度角變化的影響,均為96%.而對于GPS(G)單系統(tǒng)以及GPS+GALILEO(GE)雙系統(tǒng)組合,由于受衛(wèi)星可見數(shù)、高度角變化以及穩(wěn)定性等多種因素的影響,其歷元可用率明顯降低.
2.3 不同高度角下多模組合的定位精度分析
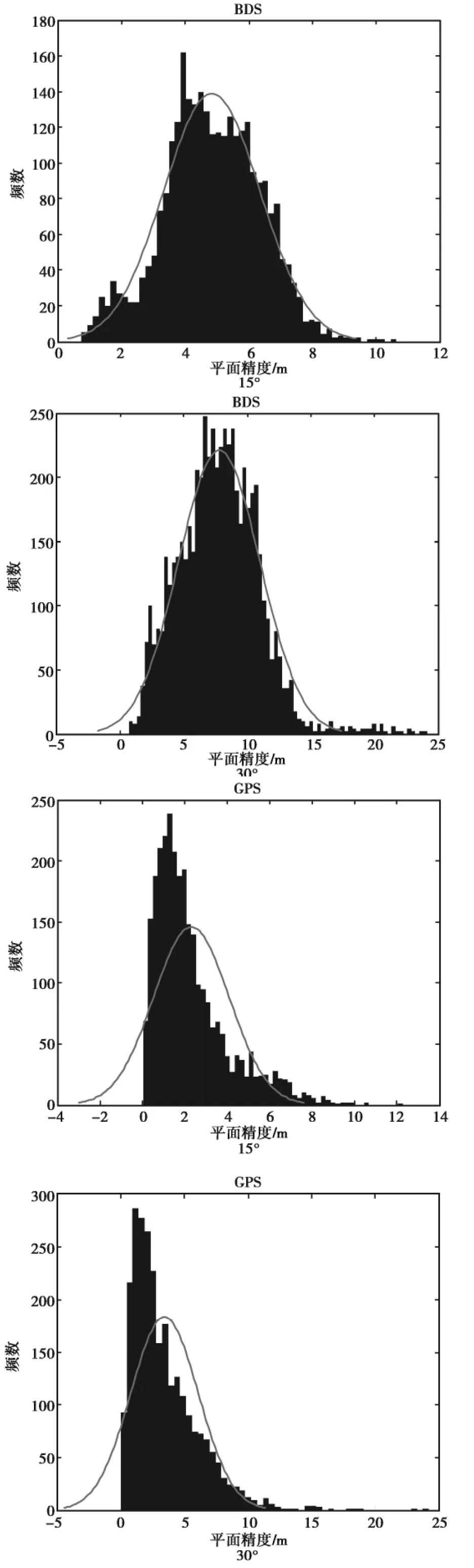
圖4 不同截止高度角下不同組合模式的PDOP值
本文選取15°和30°兩個不同的高度角分別對六種模式的定位精度進行對比分析,如圖4所示橫軸表示平面精度,縱軸表示分布頻數(shù),其分析結(jié)果如下:在高度截止角為15°時,BDS(C)的平面精度為10 m,平面精度和頻數(shù)曲線的波峰在4~6 m的范圍;GPS(G)的平面精度與BDS(C)接近,也是10 m;但是GPS+BDS+GALILEO(GCE)三系統(tǒng)組合的平面精度最高,為8 m.在高度截止角為30°時,BDS(C)、GPS(G)、GPS+BDS(GC)、BDS+GALILEO(CE)、GPS+GALILEO(GE)五種模式的平面精度均降低,但是GPS+BDS+GALILEO(GCE)組合的平面精度不變.
綜上所述:對于單系統(tǒng),隨著高度截止角的增大,同一模式的平面精度降低,定位結(jié)果較差.可以看出GPS(G)的定位結(jié)果比BDS(C)集中,但是平面精度變化很大;對于雙系統(tǒng)組合,平面精度的變化情況優(yōu)于單系統(tǒng)組合,在雙系統(tǒng)的三種組合模式中,BDS+GALILEO(CE)組合的平面精度變化相對平穩(wěn),并且定位誤差都不大,由于受可見衛(wèi)星數(shù)以及歷元可用率的影響,可以得出BDS+GALILEO(CE)組合的平面精度在雙系統(tǒng)組合中是最高的結(jié)論;而對于GPS+BDS+GALILEO(GCE)三系統(tǒng)組合,其平面精度以及頻數(shù)的變化曲線呈現(xiàn)出標準正態(tài)分布的趨勢,說明平面精度高,頻數(shù)分布相對集中.由于可見衛(wèi)星數(shù)增多并且穩(wěn)定性增強,即使高度截止角升高,但平面精度最高,仍然可以得到可靠且較穩(wěn)定的定位結(jié)果.
3 結(jié)束語
本文通過對MGEX跟蹤站的CUT0測站和NNOR測站的2016年2月1日1天的觀測數(shù)據(jù)進行試驗分析,可以得出以下結(jié)論:
1) 在同一截止高度角下,BDS(C)單系統(tǒng)的可見衛(wèi)星數(shù)多于GPS(G),但是GPS(G)的穩(wěn)定性優(yōu)于BDS(C).由于受可見衛(wèi)星數(shù)的影響,在同一高度截止角下,GPS(G)的歷元可用率低于BDS(C),并且在截止高度角為40°時,GPS(G)的歷元可用率不到50%,但GPS(G)的PDOP值和BDS(C)相當.
2) 對于GPS+BDS(GC)、GPS+GALILEO(GE)、BDS+GALILEO(CE)、GPS+BDS+GALILEO(GCE)四種組合模式:在截止高度角為15°、25°時,可見衛(wèi)星數(shù)是最多的,在截止高度角為40°、45°時,由于可見衛(wèi)星數(shù)目較少,其系統(tǒng)穩(wěn)定性受到嚴重影響,盡管如此,三系統(tǒng)組合仍然具有較強的定位性能.
3) 高度角的變化對GPS(G)單系統(tǒng)的可用率影響最大,其次是GPS+GALILEO(GE)雙系統(tǒng)組合,在截止高度角為40°時,其可用率僅為56%,可見衛(wèi)星數(shù)目下降,穩(wěn)定性降低.隨著高度角的升高,GPS+BDS+GALILEO(GCE)組合在X、Y、Z方向上的RSM值變化不大,定位性能是最穩(wěn)定的.
4) GPS+BDS+GALILEO(GCE)三系統(tǒng)組合的定位精度在0~8 m之間,遠小于單系統(tǒng)和雙系統(tǒng)組合,并且頻數(shù)分布均勻,具有較強的空間幾何構(gòu)型.系統(tǒng)定位的穩(wěn)定性和可靠性是最優(yōu)的,與其他組合模式相比,定位精度提高了20%~40%,具有較好的定位服務能力.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32