基于模糊理論的永磁同步電機直接轉矩控制研究
2018-11-16 07:53:18劉志同劉軍漆文睿
新型工業化 2018年9期
劉志同,劉軍,漆文睿
(上海電機學院電氣學院,上海 201306)
0 引言
永磁同步電機(PMSM)具有結構簡單、體積小、質量輕、效率高、功率密度高等優點,廣泛應用于航空航天、汽車、工業控制等領域。而直接轉矩控制以其響應速度快,結構簡單,魯棒性強等優點得到了許多專家學者的青睞。但是直接轉矩存在轉矩脈動大,控制精度不高的缺點,許多專家學者在提高其控制性能上做了大量的研究。主要包括,以下幾個方面:采用扇區細分的方法,提供更多可以選擇的電壓矢量[1-2];采用空間電壓矢量調制技術(SVM)的控制方法[3-4];滑膜變結構理論的控制方法[5-6];模型預測的控制方法[7-8];神經網絡[9]、模糊控制理論的控制方法[10-13]。其中文獻[11]提出了一種基于模糊控制理論的電壓矢量作用時間的控制策略,根據轉矩的偏差和轉矩偏差的變化率,來構造模糊控制器調節每個采樣周期內電壓矢量的作用時間。文獻[12]提出了將磁鏈誤差、轉矩誤差以及定子磁鏈角度做成模糊控制器的的直接轉矩控制策略,提高了控制系統的控制性能,但模糊控制規則達到32條。文獻[13]模糊控制規則多達49條,過多的模糊控制規則會影響控制系統的響應速度,加大控制器的工作量。因此本文在模糊理論基礎上設計了不帶定子磁鏈位置角度的磁鏈誤差、轉矩誤差模糊控制器,僅采用16條模糊控制規則,大大減小了模糊控制器的復雜程度,同時利用了模糊自適應PI控制器魯棒性強的特性,對減小電機轉矩脈動有很好的抑制效果。
1 直接轉矩控制方法
1.1 永磁同步電機數學模型
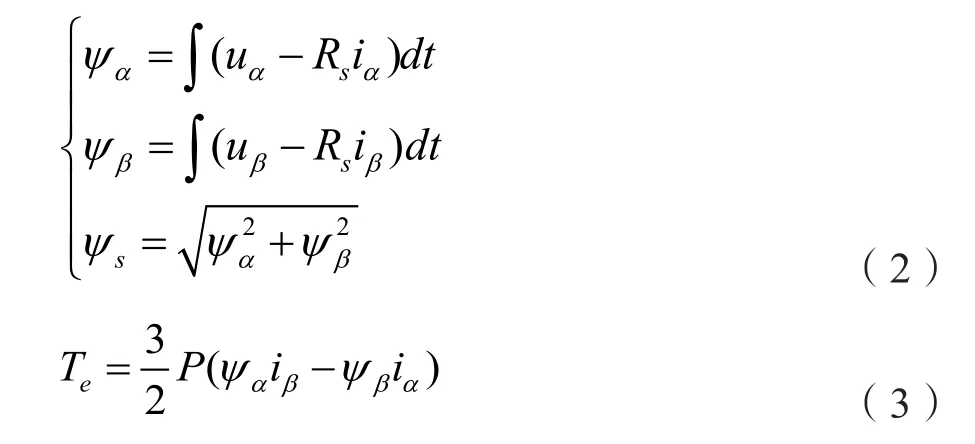
根據永磁材料在轉子上的安裝位置不同,永磁同步電機可以分為表面式和內埋式兩種。其中表面式永磁同步電機又可以分為凸出式和插入式。永磁同步電機又可以分為隱極式和凸極式。表面式永磁同步電機中的凸出式和內埋式永磁同步電機都屬于凸極式電機。隱極式永磁同步電機屬于內埋式電機[14]。隱極式永磁同步電機特點是轉子磁路結構對稱,定子直軸電感Ld等于交軸電感Lq。隱極1式永磁同步電機經過三相靜止坐標系變換到兩相靜止坐標系的Clark坐標變換公式為:
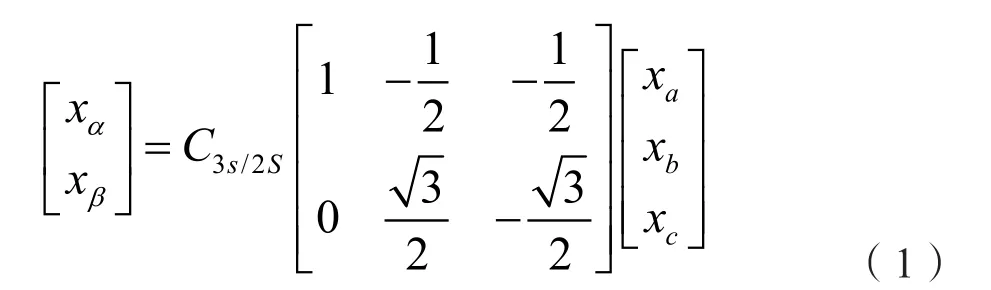
當恒功率變換時C3s/2s=當恒幅值變換時C3s/2s=2/3。本文采用恒幅值變換。將三相電壓、電流代入上式即可求出兩相靜止坐標系上電壓和電流的α、β分量ua、uβ、iα、iβ。然后可以根據上式求得的電壓、電流分量以及定子電阻求出α、β軸上的定子磁鏈分量ψα、ψβ和磁鏈幅值ψs。根據α、β軸上磁鏈分量和電流分量以及電機極對數P,就可以求得電機的轉矩Te,磁鏈和電磁轉矩的數學公式如下:
1.2 電壓矢量選取原則
在直接轉矩控制系統中,采用三相電壓型逆變器為永磁同步電機供電,把逆變器和電機看成一個整體,一個周期內通過不同的開關組合便可以控制永磁同步電機轉矩的變化。三相電壓型逆變器中有三個橋臂,該逆變器開關存在八種狀態,設1表示上橋臂導通,0表示下橋臂導通,這八種狀態則分別是 V0(000),V1(001),V2(010),V3(011),V4(100),V5(101),V6(110),V7(111),當開關狀態為V0(000)與V7(111)時無任何電壓輸出,稱為零矢量,所以V1~V6稱為非零矢量。相鄰的六個非零空間電壓矢量夾角為均為60°,兩個零矢量所在位置是原點。如圖1所示:
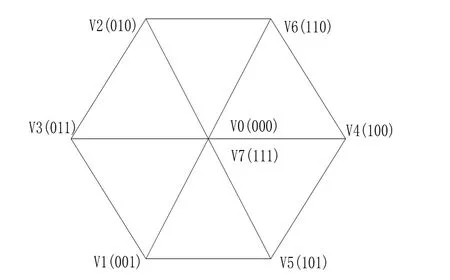
圖1 電壓矢量分布圖Fig. 1 Voltage vector distribution map
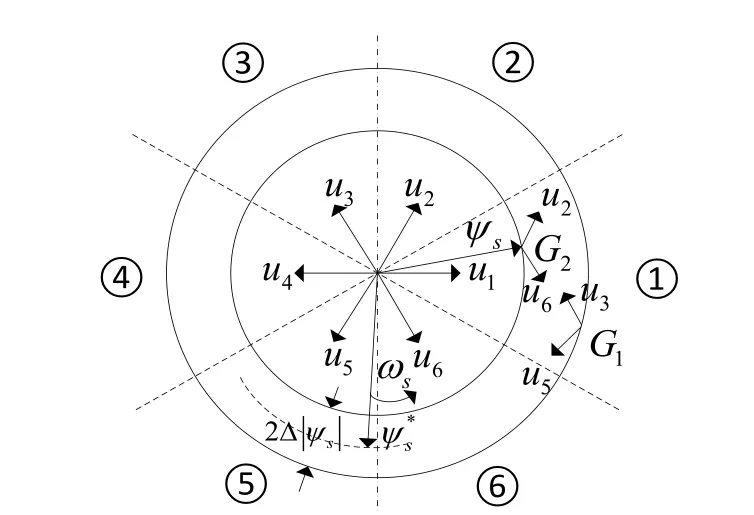
圖2 定子磁鏈矢量運行軌跡圖Fig. 2 Stator flux linkage trajectory diagram
定子磁鏈幅值是保持恒定不變的,要想完成一個完整的周期,這就需要逆變器狀態不停的變換,在每個開關狀態下,相位旋轉的角度為60°。因此分成了六個扇區,如圖2定子磁鏈運行軌跡所示。這六個扇區分別對應圖1內六個開關狀態。根據定子回路電壓平衡方程式,定子磁鏈和定子電壓之間的關系為:

當電機運行速度很高時,電機定子電阻壓降很小,定子電阻就可以忽略不計,即:

此時定子磁鏈的幅值和位置控制的方法可利用控制逆變器的輸出電壓矢量us來實現,零矢量具有保持電磁轉矩的功能。Δψ=1,增加磁鏈,Δψ=0,減小磁鏈。Δt =2,增大轉矩,Δt=1,保持轉矩,Δt=0,減小轉矩。例如在第一扇區,選擇u2可以增加轉矩,增大磁鏈;選擇u6可以增加磁鏈,減小轉矩。同理,選擇u3可以減小磁鏈,增加轉矩;選擇u5可以減小磁鏈,減小轉矩。空間電壓矢量選擇采用查表的方式,開關電壓矢表如表1所示:
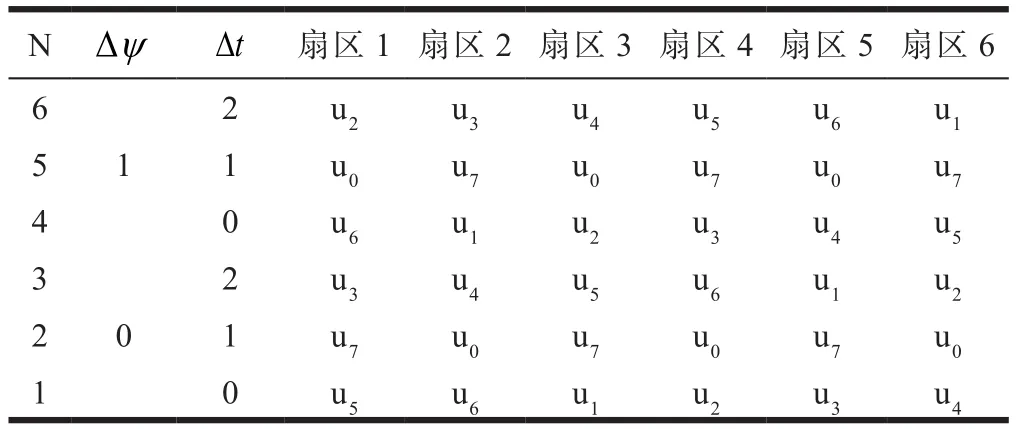
表1 開關電壓矢量選擇表Table 1 Switching voltage vector selection table
2 模糊直接轉矩控制
2.1 磁鏈、轉矩模糊控制器設計
模糊控制器以定子磁鏈誤差Δ?及轉矩誤差ΔTe進行模糊分級并作為輸入,以開關電壓矢量表中的N作為輸出量。模糊控制器設計如下:
(1)模糊化
輸入變量Δ?和ΔTe模糊化為Δ?和ΔT。磁鏈誤差Δ?的和轉矩誤差ΔT的模糊子集都可以設為“負大”(NB)、“負小”(NS)、“正小”(PS)、“正大”(PB)四個子集。磁鏈誤差模糊論域的變化區間設定為[-1,1]。轉矩誤差模糊論域的變化區間設定為[-2,2]。磁鏈輸入量變換函數為1-e(-600x)/1+e(-600x),轉矩輸入量變換函數為2-e(-12x)/2+e(-12x)/。隸屬度函數采用均采用最常用的三角形。輸入量磁鏈誤差和轉矩誤差兩者模糊隸屬函數形狀一樣,如圖3所示。
模糊控制器輸出N可以為六個值,分別是整數“1”“2”“3”“4”“5”“6”。其中“1”表示減小磁鏈、減小轉矩,“2”表示減小磁鏈、保持轉矩,“3”表示減小磁鏈、增大轉矩,“4”表示增大磁鏈、減小轉矩、“5”表示增大磁鏈、保持轉矩,“6”表示增大磁鏈增大轉矩,和表1相對應。模糊輸出隸屬度函數如圖4所示。
(2)模糊規則
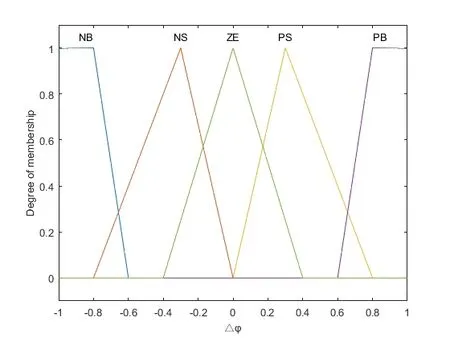
圖3 輸入量磁鏈誤差隸屬度函數Fig. 3 Input flux error membership function
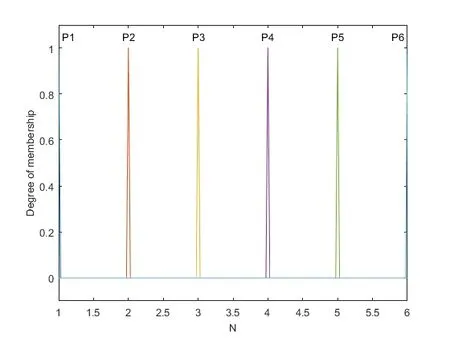
圖4 輸出量N隸屬度函數Fig. 4 Output N membership function
Mamdani推理是模糊控制中普遍使用的邏輯推理方式,根據輸入磁鏈誤差和轉矩誤差的模糊子集與輸出變量的關系,可以得到模糊控制規則表,控制系統系統輸出變量P1、P2、P3、P4、P5、P6分別與六個輸出值“1”“2”“3”“4”“5”“6”相對應。磁鏈、轉矩模糊控制規則表如表2所示:
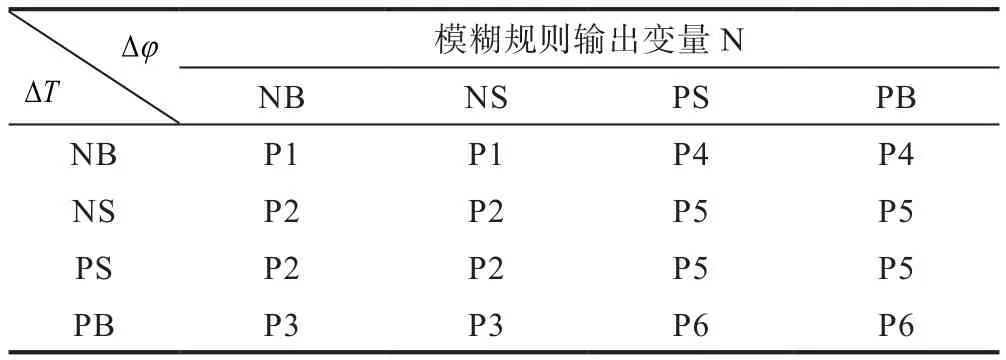
表2 磁鏈、矢量模糊控制規則表Table 2 Flux chain, torque fuzzy control rule table
因為輸出采用單點模糊集合,所以不需要進行解模糊,使用最大隸屬度法選擇輸出即可。
2.2 模糊自適應PI控制器設計
(1)模糊化
模糊自適應PI控制器輸入量分別為轉速誤差e和轉速誤差的變化率ec,對其模糊化后分級為七個等級,分別為“負大”(NB)、“負中”(NM)、“負小”(NS)、“零”(ZE)、“正小”(PS)、“正中”(PM)、“正大”(PB)。根據實驗,定義輸入量E和EC的論域均為[-3,3],ΔKp的論域為[-0.3,0.3],ΔKi的論域為[-0.06, 0.06]。比例因子Ke和Kec決定了模糊控制器對輸入誤差e及誤差變化率ec的靈敏度,Ke和Kec由e/E和ec/EC來確定,Ke和Kec分別取為0.25和1.5,相當于e和ec的論域分別為[-12, 12]和[-2, 2]。模糊控制器輸出量ΔKp和ΔKi的比例因子值取分別為0.3和0.5。模糊控制器輸入量E、EC的隸屬度函數圖形一樣,則輸入量E和輸出量ΔKp、ΔKi的隸屬度函數為:

圖5 輸入量E隸屬度函數Fig. 5 Input E membership function
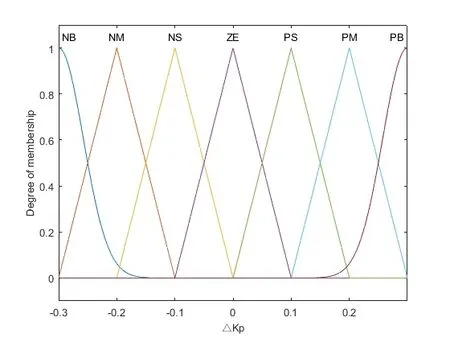
圖6 輸出量ΔKp隸屬度函數Fig. 6 Output ΔKp membership function
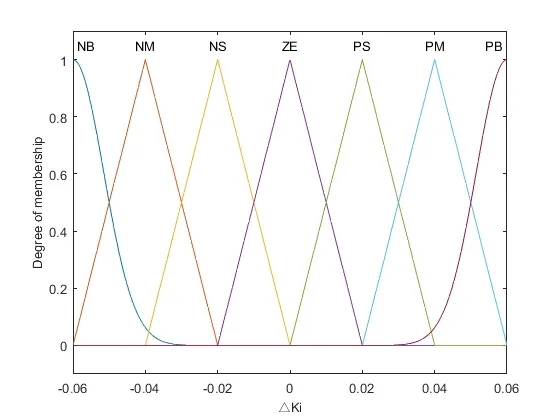
圖7 輸出量ΔKi隸屬度函數Fig. 7 Output ΔKi membership function
(2)模糊規則
根據PI調節的經驗可以總結出模糊自適應PI控制規則,模糊控制ΔKp和ΔKi的規則表如表3和表4所示。自適應模糊PI控制器解模糊時采用最大隸屬度法。
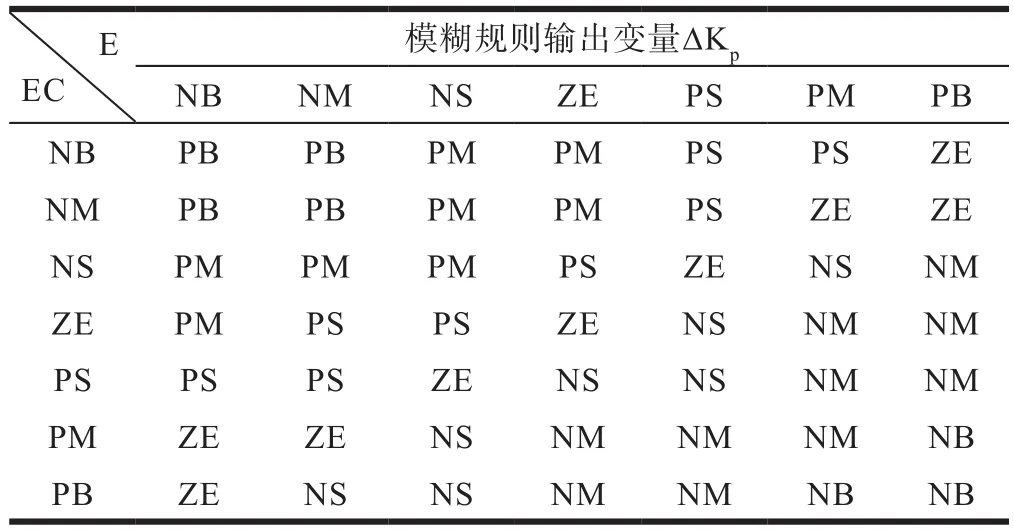
表3 ΔKp的模糊控制規則Table 3 The fuzzy control rules of ΔKp
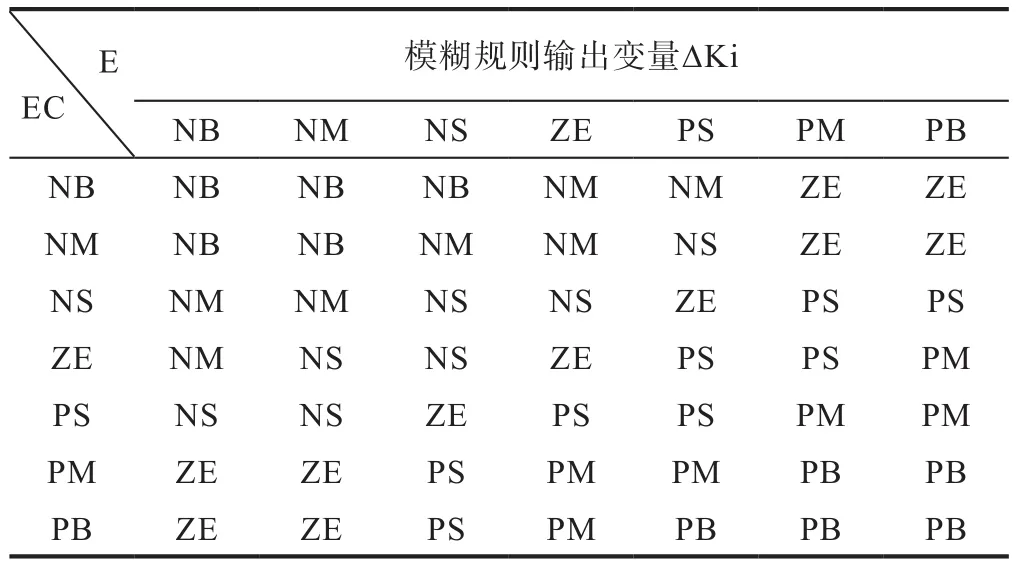
表4 ΔKi的模糊控制規則Table 4 The fuzzy control rules of ΔKi
3 仿真結果分析
在MATLAB中建立電機控制模型并進行仿真,電機參數為:定子電阻R=1.2 Ω,交、直軸電感Ld=Lq=8.5 mH,極對數P=4,轉子磁鏈Ψf=0.175 Wb,電機額定轉速n=750 r/min,額定電流I=15 A,直流母線電壓Udc=311 V。仿真實驗為0.2 s,在0.1 s時加入1.5 N負載,仿真模型原理圖如圖8所示。
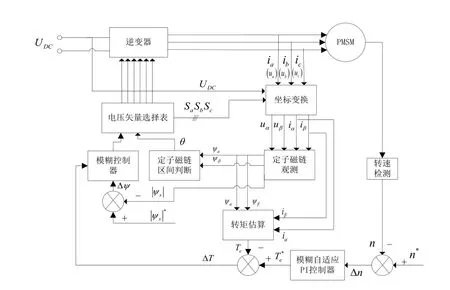
圖8 模糊直接轉矩控制系統框圖Fig. 8 Block diagram of fuzzy direct torque control system
仿真結果如圖9~16所示。由仿真結果可以得知,基于模糊理論的雙模糊控制系統電機轉速在0.8 s的時候達到穩態450 r/min。同時負載的擾動變為10 N·m,相比于傳統直接轉矩控制擾動范圍24 N·m,抗擾動能力也更強。傳統直接轉矩控制系統轉矩脈動大,大約為1.1 N·m,而基于模糊理論的雙模糊控制系統轉矩脈動卻小很多,大約為0.36 N·m,相比前者,轉矩脈動減小了67%。新的控制系統相比于傳統直接轉矩控制系統,磁鏈圓環更細,動態響應更快,魯棒性更好。
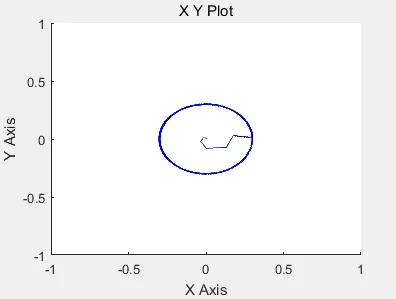
圖9 傳統直接轉矩磁鏈軌跡Fig. 9 Traditional direct torque flux locus
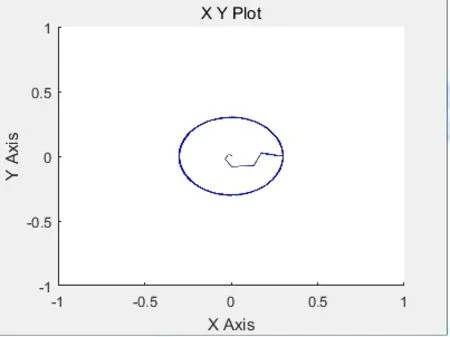
圖10 模糊自適應直接轉矩磁鏈軌跡Fig. 10 Flux path diagram of fuzzy adaptive PI system
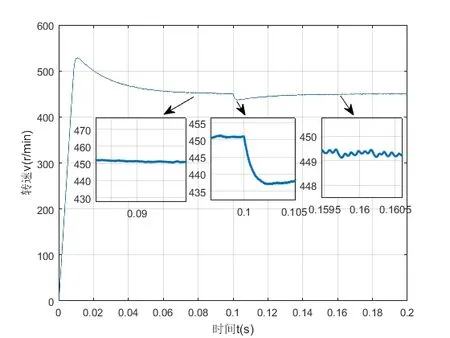
圖11 傳統直接轉矩轉速Fig. 11 Traditional direct torque speed
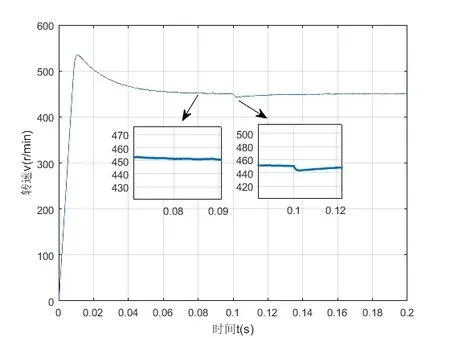
圖12 模糊自適應直接轉矩轉速Fig. 12 Fuzzy adaptive direct torque speed
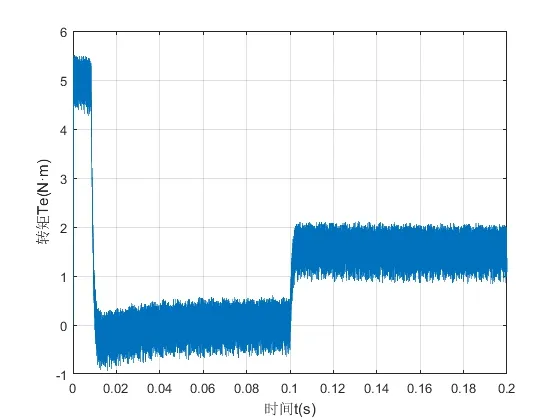
圖13 傳統直接轉矩控制轉矩波形Fig. 13 Traditional direct torque control torque waveform
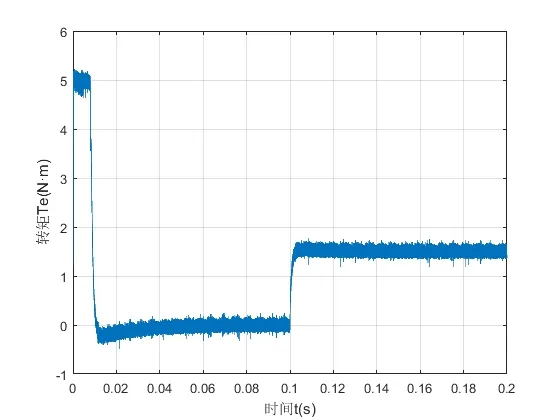
圖14 模糊自適應直接轉矩控制轉矩波形Fig. 14 Fuzzy adaptive direct torque control torque waveform
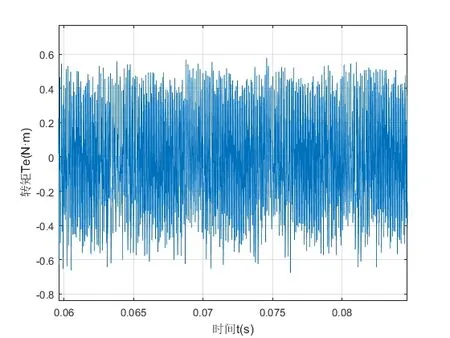
圖15 傳統直接轉矩轉矩脈動放大圖Fig. 15 Traditional direct torque ripple amplification diagram
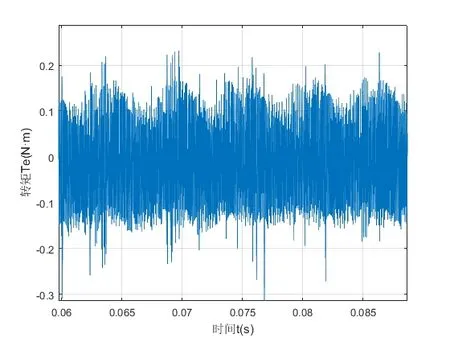
圖16 模糊自適應控制轉矩脈動放大圖Fig. 16 Fuzzy adaptive control torque ripple amplification diagram
4 結論
對于傳統永磁同步電機直接轉矩控制,本文應用模糊控制論對其進行改進,加入零矢量后將磁鏈滯環及轉矩滯環替換成模糊控制器,同時將傳統PI控制器替換成模糊自適應PI控制器,因為沒有將定子磁鏈位置角度加入模糊控制器中,所以控制系統性能得以提高,節約了控制器資源。實驗結果表明,基于模糊理論的直接轉矩控制系統轉矩脈動小,抗擾動性能好,魯棒性強,具有良好的穩態和動態性能。因為直接轉矩控制響應速度快的特點,在工業以及軍事上有廣闊的應用前景。