智慧化客車上水裝置的研究與設計
2018-11-14 09:02:50王健趙夢丁道祥王偉
中國設備工程 2018年21期
關鍵詞:機械
王健,趙夢,丁道祥,王偉
(中國鐵路沈陽局集團有限公司科學技術研究所,遼寧 沈陽 110013)
列車上水是鐵路旅客運輸中的一項重要工作,當列車到達上水車站時,車站作業人員為每節車體的水箱注水,以保證旅客的用水需求。目前全路各鐵路局的大多數車站已開始安裝智能化客車上水裝置,可以實現電動收管、遠程遙控上水和停水、冬季自動加熱。但是,上水作業時仍需由人工將上水軟管接到客車水箱的注水口上,當開始溢流時,關閉上水栓閥門,拔下上水軟管,上水作業結束。該方式具有浪費水資源、損壞路基、勞動強度高、存在安全隱患等許多弊端。
為了改變此種狀況,本文提出了一種智慧化客車上水的技術方案,可以實現上水裝置自動識別車體注水口位置,上水軟管與車體注水口自動對接,自動判斷水箱滿水、脫管及收管。
1 作業環境
由于車站線路兩線間的設備多、路面不平坦、冬季易結冰,若采用移動式機器人自動上水,對機器人的要求非常高,必須適應崎嶇路面和冰面的路況,否則容易發生機器人的傾覆事故。若采用在高站臺側面上安裝移動式上水接口的方式,借助某些技術手段實現自動搜索車體的注水口,這需要將高站臺做成中空,里面放置給水設備和管道,僅適用于新建的客運高站臺車站。
從安全性和經濟性的角度考慮,采用軌旁限界外安裝固定式導軌的方案,適用于各種類型車站的站臺,施工難度小、成本低,安全性和可靠性高。
2 技術方案
智慧化客車上水裝置共分為3部分:機械運動機構、識別對接及水滿判斷。
根據車站作業的環境特點,機械運動機構部分采用軌旁安裝導軌,機械臂沿導軌移動的技術方案;識別對接采用射頻識別和接近傳感器的技術方案;水滿判斷采用無線收發的技術方案。
2.1 機械運動機構
2.1.1 導軌
在軌旁符合限界要求的位置安裝金屬導軌(如圖1所示),導軌用于承受、固定、引導移動裝置即機械臂。本方案采用線性導軌,用于直線往復運動,擁有比直線軸承更高的額定負載,同時可以承擔一定的扭矩,可在高負載的情況下實現高精度的直線運動。
導軌作為導向裝置,應具有下列性能。
導向精度:主要指導軌運動軌跡的精確度,直接關系著上水軟管與注水口的自動對接能否成功。影響導向精度的主要因素有:導軌的幾何精度和接觸精度,導軌結構,導軌及其支撐部件的剛性,靜態(動態)壓導軌之間的油膜厚度及其剛度。
精度保持性:主要由導軌的耐磨性決定。耐磨性與導軌的材料、導軌副的摩擦性質、導軌上的壓強及其分布規律等因素有關。

圖1 導軌結構圖
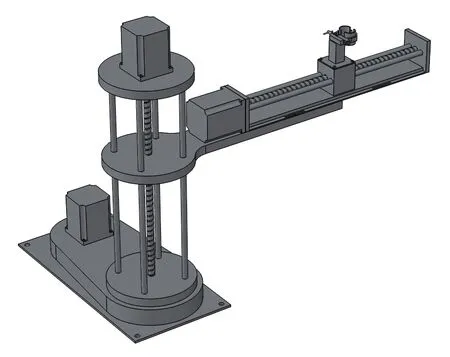
圖2 機械臂總體結構圖
剛度:包括導軌的自身剛度和接觸剛度。主要取決于導軌的形狀、支撐構建的尺寸和連接方式以及應力條件等因素。
低速運動的平穩性:當可移動導軌用于低速運動時,容易產生摩擦自激振動,即爬行現象。爬行會降低定位精度或增加被加工工件表面的粗糙度。
2.1.2 機械臂
機械臂主要包括旋轉機構、升降機構、伸縮機構及夾取機構共4部分,總體結構如圖3所示。機械臂各個動作的實現全部由步進電機驅動完成,各個步進電機的動作指令由控制終端通過電機控制器來下達。
2.2 旋轉機構
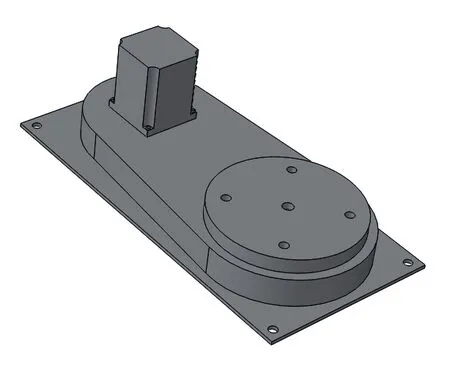
圖3 旋轉機構結構圖
旋轉機構的主要功能是當接到“上水”命令后,帶動升降機構、伸縮機構及夾取機構進行90°旋轉,使伸縮機構靠近注水口。
旋轉機構固定于導軌上,主要原理是通過同步進電機驅動減速齒輪組帶動安裝于其上的機構進行旋轉。
2.3 升降機構
升降機構的功能主要是用于調整上水軟管與車體注水口的相對高度。
升降機構主要由步進電機、絲杠、輔助杠、承重平臺、上下底座組成。其原理是通過步進電機驅動絲杠轉動,將旋轉運動變換為直線運動,步進電機的正反轉實現承重平臺的上升和下降,如下圖4所示。
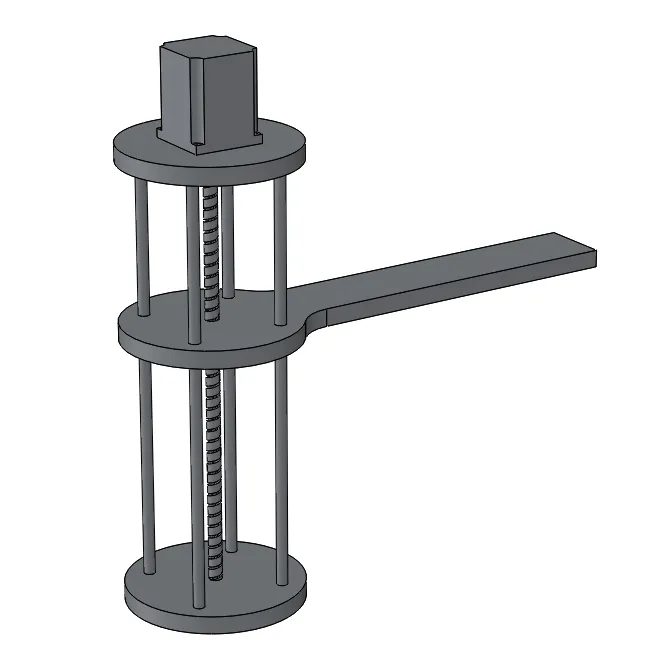
圖4 升降機構結構圖
2.4 伸縮機構
伸縮機構的功能主要是用于調整上水軟管與車體注水口的水平距離。
伸縮機構固定在升降機構的承重平臺上,主要是應用線性滑軌滾珠絲杠直線導軌,通過步進電機的正反轉實現夾取機構的前進和后退,如圖5所示。
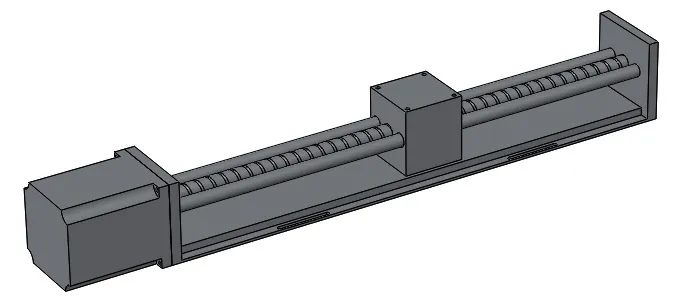
圖5 伸縮機構結構圖
2.5 夾取機構
夾取機構的功能主要是用于夾緊上水軟管,帶動上水軟管與機械運動機構同步運動。
夾取機構固定在伸縮平臺上,其主要結構是模仿人手抓取動作進行設計,通過人工轉動絲杠,實現夾緊和松開注水軟管,如圖6所示。
2.6 識別對接
2.6.1 注水口位置識別
注水口位置識別采用射頻識別技術,車輛注水口位置兩側一定距離內,各固定1個RFID標簽,上水裝置安裝標簽掃描識別設備。
列車進站停車后,上水裝置接收到“開始上水”的指令,機械臂沿導軌向注水口位置運動,當機械臂上的標簽掃描識別設備同時接收到車輛注水口兩側固定的2個RFID標簽信息時,機械臂停止運動,即上水裝置對準注水口的位置。
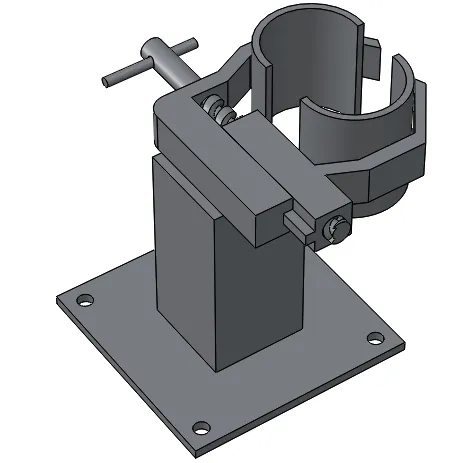
圖6 夾取機構結構圖
2.6.2 上水軟管與車體注水口的對接
機械臂的伸縮機構共安裝4個接近傳感器,分為橫向識別1個、縱向識別2個、垂向識別1個。車輛注水口安裝4塊接近傳感器識別金屬板。
當上水裝置成功對準注水口位置后,機械臂的升降機構開始上升一定距離并停止運動。伸縮機構開始伸長直至橫向識別接近傳感器發出信號停止運動,表明已經上水軟管與車體注水口在橫向上對準;機械臂開始向無信號輸出的縱向識別接近傳感器方向運行,直至2個縱向識別接近傳感器均發出信號,機械臂停止運動,表明已經上水軟管與車體注水口在縱向上對準;機械臂的升降機構開始上升,直至垂向識別接近傳感器發出信號停止運動,表明上水軟管與車體注水口自動對接成功,開始上水。
2.7 水滿判斷
水滿判斷是智慧化客車上水裝置的重要組成部分。當客車水箱水滿時,自動停止上水,從而達到避免水資源浪費的目的,如圖7所示。

圖7 水滿判斷原理圖
水滿判斷的實現,主要是基于水位傳感器及無線收發裝置。首先,客車水箱內安裝高精度水位傳感器,用于水箱內水位的監測;然后,客車上安裝的無線發射裝置將采集的水位數據實時傳送給地面的無線接收裝置;最后,控制終端接收地面無線接收裝置傳輸來的水滿信號控制客車上水栓停止上水。
3 實現目標
智慧化客車上水裝置的研制目標主要是實現客車上水的全自動化。當列車進站停靠在站臺旁后,車站中控室的上水工作人員點擊控制主機的開始按鈕,上水裝置自動完成注水口位置的搜索、上水軟管與注水的對接、上水、水滿自動停止、脫管及收管等工作。同時,智慧化上水裝置具備人工模式和自動模式,在設備發生緊急故障時,能夠切換到人工模式,進行人工手動上水,保障客車上水工作的正常進行。
4 結語
雖然鐵路客車上水裝置全自動化的研究存在一定的技術難度,但是鐵路裝備的智慧化勢在必行。若智慧化客車上水裝置研制成功并投入使用,將大幅減少人力成本、縮短上水時間、提高車站的上水效率,節約大量的水資源,保障上水工作的安全快捷,徹底改變鐵路客車上水的面貌,在取得經濟效益的同時,對環境和社會也將產生很大的效益,為推動鐵路裝備智慧化的發展起到積極作用。
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09
